
Multi-Agent System Model for Container Management Simulation
Houda Zouhaier
1
, Fahem Kebair
1
, Fr
´
ed
´
eric Serin
2
and Lamjed Ben Said
1
1
Laboratoire SOIE, Higher Institute of Management of Tunis, Le Bardo, Tunis, Tunisia
2
Laboratoire LITIS, University of Le Havre, Le Havre, France
Keywords:
ATN, Container Management, Multi-Agent System, MESSAGE/UML, Simulation.
Abstract:
This paper discusses an approach to build a multiagent system for simulating container management in a hub
port logistics. The simulator has as goal to help assessing and defining container management strategies. This
allows to plan and to control the management of containers while minimizing the waiting time and the parasite
shifts and insuring the consistency of the performed tasks sequence. The proposed model involves the multi-
point of view and the emergence of behavior specific to the theory of complex systems. The paper is structured
as follows: first we present related works, then we expose the multiagent model of the simulator, after that we
present the internal structure of the agents and finally we provide and discuss first implementation and results.
1 INTRODUCTION
Supply chain is considered as a network in which a
range of actors involved throughout the chain between
the origin point (suppliers) and the destination point
(clients) for manufacturing goods taking into account
many constraints in time and space. Tasks of the chain
must be designed to satisfy the needs of customers. In
the delivery phase, goods are redirected through a net-
work of intermodal transport from a logistics hub to
another until their destinations at the lowest cost and
as soon as possible (Govil and Proth, 2001). A logis-
tics hub treats thousands of daily shifts of which man-
agement should be optimized as for the internal move-
ments performed by machines. A shift includes three
operations: picking up, transporting and putting-on
container. The implementation of a strategy for man-
agement and decision making is necessary therefore
in order to ensure container treatment.
Decisions for container management take into
consideration several constraints such as customer re-
quests (turn-around time, low risk delivery and a min-
imum of handling possible) and resource availability.
To improve the port hub performance, decisions are
made by evaluating various planning policies. In this
field, researchers have defined some productivity in-
dicators for evaluating the decisions performance as
service time
1
, container terminal capacity, berth uti-
1
Service time is a period of time in which the ship is
berthed. (Henesey, 2006)
lization, waiting time
2
and dwell time
3
, etc. (Hene-
sey, 2006). A logistics hub is characterized by its
dynamicity and the intervention of several actors (eg.
containers, engines, planner, etc.). The dynamicity is
defined by the movements number that can occur, the
containers arrival and departure, the unexpected ap-
pearance of new missions, etc. (Psaraftis, 1995).
To deal with this dynamicity and given the ne-
cessity of coordinating between different actors, we
propose in this paper a distributed approach using the
Multiagent Systems (MAS) technology (Wooldridge,
2009). This approach allows us to share the plan for
tasks accomplishment and to treat the dynamic as-
pect of containers in the terminal. The multi-agent
approach proved their efficacity in container manage-
ment for port terminals. Indeed, Bin in (Bin et al.,
2011), proposes a MAS model of container terminal
scheduling and management system, focusing on how
to coordinate the scheduling of different resources in
a container terminal. Lawrence in (Henesey et al.,
2003) describes an approach (supported with MAS-
CommonKADS) enabling decision makers to simu-
late various port policies and analyze the multitude of
“what if” scenarios to model the system architecture
and the role of different parts which compose it. We
cite also the work of Kefi in(Kefi et al., 2009)who uses
an informed algorithm to describe the behaviour of
2
waiting time is time during which the vessel must wait
for an available berth. (Henesey, 2006)
3
dwell time is the time spent by the container in the port.
(Henesey, 2006)
498
Zouhaier H., Kebair F., Serin F. and Ben Said L..
Multi-Agent System Model for Container Management Simulation.
DOI: 10.5220/0004453404980505
In Proceedings of the 15th International Conference on Enterprise Information Systems (ICEIS-2013), pages 498-505
ISBN: 978-989-8565-59-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

the container agents in storage areas introducing intel-
ligence degree to reduce significantly the total number
of unproductive movements.
The work presented in this paper enhances these
researches by proposing an innovative model which
integrates the multipoint of view and the emergence
of behavior specific to the theory of complex systems.
We propose to study the evolution of container agents
behaviour from their arrival until their shipments. The
final goal is to build a container management sim-
ulator that enables decision makers to analyse dif-
ferent port policies and to define container manage-
ment strategies. We opt for an individual-centered
approach to focus the management on the container
life cycle, and to let emerge consequently a global be-
havior. Each agent of the system is a microscopic rep-
resentation. We consider that the container is an indi-
vidualized agent provided with an active behaviour. It
seeks its satisfaction by moving optimally in the ter-
minal to reach their destinations. The engines are also
considered agents to ensure the mobility of contain-
ers and respond to their requests. To model the sys-
tem architecture and the role of different parts which
compose it, we use the agent-oriented methodology
MESSAGE / UML (Caire et al., 2001).
This paper is structured as follows: first, container
management in hub port logistics and their related
problems are discussed. Then, the multi-agent model-
ing using the agent-oriented methodology MESSAGE
/ UML as well as the internal structure of the agents
are presented. In the next section, an implementation
of the model using the NetLogo simulation platform
and the different results are detailed. Finally, we pro-
vide a general conclusion which includes the contri-
butions of this work and the prospects that enrich it.
2 MANAGEMENT OF
CONTAINERS IN A HUB PORT
LOGISTICS
Mocellin in (Mocellin, 2006) defines a hub as a “place
where we receive the goods for the resend in a very
short time.” Unlike a warehouse, Mocelin (Mocellin,
2006) considers that it is infrequent to apply repack-
aging operations on a platform as it aims to tranship
goods from one mode to another and redirect them
to another destination. From the introduction of con-
tainers in the 50s, the international network has given
rise to a multitude of modes, as the rail, road and sea
mode. Thus, we can design transport systems in two
conceptual ways including more than one transport
mode: The multimodal transport which is the goods
transport using at least two modes. The intermodal
transport which is, according to The United Nations
Economic Commission for Europe (ECE), the deliv-
ery of goods in one and the same loading unit (such
as a container) or one and the same vehicle using suc-
cessively several transport modes without loading or
unloading (CEMT, 2006).
2.1 Delivery of Containers via
Intermodal Network
Intermodal transport containers is maintained by a set
of operations. In fact, the displacement of containers
typically begins with the road mode from the freight
terminal to a multimodal transport terminal where
containers are transferred then from road to rail. Con-
tainers are transported for a long distance to the ar-
rival terminal where they are transshipped onto a car-
rier. Containers are transferred by road to the port of
the exporting country. After customs clearance opera-
tions and temporary storage, the containers are loaded
onto container ships and then transported to the arrival
port. Upon their arrival, the containers are unloaded
from the container ships and transported by road in
the importing country. The same procedure of trans-
port is repeated from the arrival terminal until the ar-
rival at the final customer (E.C.M., 2005).
2.2 Container Life Cycle Management
The life cycle of a container includes a set of pro-
cesses that operate together. Their rapid chaining im-
proves the delivery of goods in an appropriate time
which progressively improves productivity. In this pa-
per, we consider the mode ship to ship for delivery
and receipt of containers. The four main processes
are receipt, transfer, storage and delivery containers.
When a ship arrives, it must be assigned to an op-
timal position along the quay which is equipped with
a number of cranes for the tasks of loading and un-
loading containers. This number varies depending on
the number of containers to be treated and the length
of the ship. Containers are transferred from a berthing
area to a storage area near to the place where they will
be transshipped next using a set of trailers or strad-
dle carriers. After their transfer, containers are raised
by stacking cranes or straddle and piled one on top
of other. Operations of stacking provide the perfor-
mance of a terminal by the segregation of containers
in various strategies. To identify a container, a plan-
ner uses a computerized management system based
on four coordinates which are the number of stor-
age area, the bay number, the line number and the
level of stacking. Additional moves are performed
Multi-AgentSystemModelforContainerManagementSimulation
499

between empty stock, sheds, and import and export
container stocks if sheds and/or empty depots exist
within a terminal (Steenken et al., 2004). Accord-
ing to the request of a customer, the container will
be delivered out of the terminal respecting the desired
delivery date. A container is removed from the stor-
age area, transported then by a transport vehicle to the
ship operation area and finally loaded on a ship. The
ship leaves the terminal after loading containers.
2.3 Types of Decisions in Container
Management
Researchers use a set of indicators to evolve perfor-
mance decisions. They contributed by the invention
of several strategies for improving various tasks in the
terminal. There are two types of decisions: planning
and control. A planning decision is more concerned
for the design and development process to be carried
out in the implementation effective containers man-
agement. A control decision aims to ensure a high
level of productivity and to monitor the process. Deci-
sion problems are divided into three levels: strategic,
tactical and operational. Strategic decisions are long-
term decisions that include the structure of the ter-
minal, handling procedures and resource types to be
chosen. Tactical decisions are medium term decisions
which include the resources number to allocate. Op-
erational decisions are short term which include the
process to be followed by resources (Henesey, 2006).
2.4 Management and Decision
Problems of Container Management
Given the large number of treated movements daily in
a terminal, the decision is made by a set of constraints
of time or space to plan and control the containers
handling. We include the emergence of new mis-
sions during the day although planning is already es-
tablished. The departure and arrival unpredictable of
containers which complicates their location and dis-
tribution in the storage areas. This affects the strate-
gic decision-making for planning storage. The unex-
pected appearance of breakdowns affects the alloca-
tion of resources to do the tasks which generates a
rectification on the tactical decision to plan and con-
trol the containers handling. This leads an increase
in the waiting time in the supply chain. The limited
resources availability, which complicates the synchro-
nization of tasks sequence. This leads to a problem of
making operational planning. Due to the imperfection
of classic tools to solve and to schedule the dynamic-
ity and the complicated managing of containers in a
terminal, we have used a distributed resolution using
agent-oriented methodology.
3 MULTIAGENT MODEL FOR
SIMULATING CONTAINER
MANAGEMENT
3.1 Environment Characterization
We consider several assumptions in the problem res-
olution. Indeed, An elapsed time for the container
treatment is measured to determine if the service is
provided in a determined time. Moreover, ship depar-
ture date should be known in advance. The first agent
resource that responds to the container agent request
is the most appropriate. The containers number to
be processed simultaneously is obtained by the quay
cranes number allocated per vessel. The container sat-
isfaction is to perform the unloading, the transfer and
the loading operation as soon as possible. The con-
tainers priority depends on several factors.
• The containers number to be processed by quay
cranes is obtained by dividing the containers total
number ( to be loaded and unloaded by vessel) by
quay cranes number.
• The service time per container is obtained by di-
viding the service time by the containers number
to be processed per quay cranes. It corresponds to
the deadline for processing container.
• The containers priority depends on the ship ser-
vice time whereby it arrived ts
1
and the ship ser-
vice time whereby will be shipped ts
2
.
• Therefore, the containers priority is defined by the
shortest sum of service time per each container.
p = ts
1
+ts
2
We also identified several parameters in our mod-
els which are:
• c: means the resource capacity. It is measured by
the containers number handled in the same pro-
cess;
• p: is the container priority;
• d: it the distance between two points and is mea-
sured by a time interval;
• t: the service time is the time interval set between
arrival date and departure date of a ship. It corre-
sponds implicitly to the limit time of the process-
ing of all containers;
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
500
• tc: the current processing time of a container that
is initiated to zero and evolves in time until the
end of treatment.
• ts: the average service time per container is the
period fixed for processing each container.
3.2 System Design and Architecture
MESSAGE / UML is a methodology for agent-
oriented software engineering for describing and
modeling agents. It allows to study the dynamic evo-
lution of the behaviour of each agent by the incre-
mental development of links between the agent and its
properties (goals, services, roles, resources, etc.). We
use this methodology in order to define and to charac-
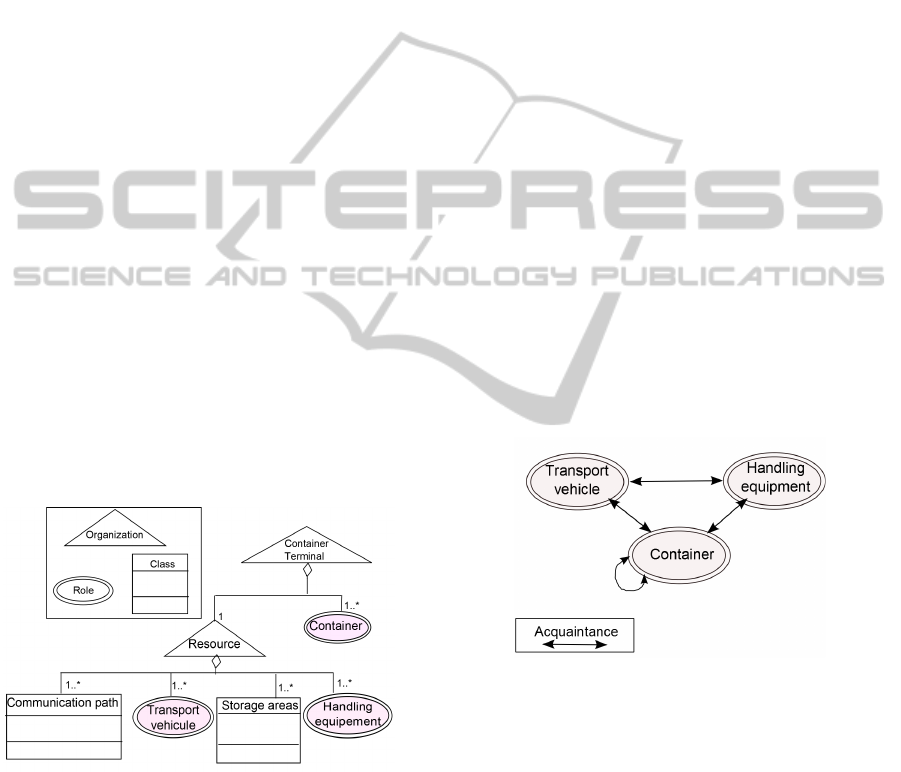
terize the multiagent model that we propose. Indeed,
figure 1 shows the structural relationships of the orga-
nization model. An Organization is represented by an
isosceles triangle. The Role that represents an agent
is schematically drawn by ellipses. The Class formu-
lates objects that are used in the port hub. In fact, the
container terminal is the main organization in which
run the port operations. It is composed of a set of
containers with different types and dimensions. Con-
tainers to treat, require services from a resource or-
ganization comprising handling equipment and trans-
port vehicles. A machine is a resource agent. Storage
areas and communication lines are treated as objects
to be consumed in the terminal. It should be noted
that the appropriate icons have been associated with
different stereotypes.
Figure 1: Structural relationships.
The inter-agent interaction is an important concept
in multiagent systems and the establishment of social
organizations. According to (Ferber, 1995), it is ex-
pressed by a set of actions that have an influence on
the future behavior of agents. Interaction can provide
the possibility of communication between agents in
order to coordinate and to avoid the encounter that
leads to a collision (such as moving vehicles causing
a collision).
Figure 2 shows the acquaintances relationship be-
tween the system entities where different stereotypes
are schematized by the same icons of figure 1. An
acquaintance is shown by a double arrows. A con-
tainer agent interacts with resource agent to determine
the set of tasks of a requested service in two cases.
It communicates with a resource agent to establish
the process of resource sharing using the Contract
Net protocol or to determine the allocation resource
through the planner agent using the request protocol.
According to (Ferber, 1995), the type of interaction
between the resource agent and the container agent
is “Collaboration coordinated “. It is characterized
by a compatible goals between entities (answer to the
containers satisfaction) and insufficient skills. Agents
must coordinate their actions in order to ensure the
realization of all requested services by a container
agent.
Agents resources communicate with each other
using the request protocol to ensure the consistency
and the synchronization of tasks to accomplish.
Container agents interact with each other using the
Contract Net protocol to negotiate the resources shar-
ing on condition that they have the same destination
and the same size. The interaction between container
agents is defined by goals incompatibility which re-
quires negotiation to achieve their satisfaction. So,
we can name the interaction type by “Pure individual
competition” (Ferber, 1995).
Figure 2: Acquaintance relationships.
In MESSAGE methodology, each agent owns
tasks, interactions and goals in its environment. A
task is executed when a precondition is valid and
when is completed by a post-condition. A composite
task is expressed in terms of causality between sub-
tasks. It can be modeled by a state machine. We mod-
elise it therefore by a state machine using the ATN
(Augmented Transition Network) (Woods, 1970), we
discuss this in the next section.
3.3 Internal Structure of Agents
ATN is the main internal element of an agent. ATN
is a finite state machine that describes the agent be-
Multi-AgentSystemModelforContainerManagementSimulation
501
haviour where each transition is marked by one or
more conditions and corresponding actions. Its role
is to reflect the dynamicity and to insure the agent re-
activity and proactivity. According to (Cardon, 2003),
an agent is structured by the following modules:
• Knowledge module: contains the agent knowl-
edge which may be static or dynamic. Static
knowledge represent environmental data whereas
dynamic knowledge represent environmental vari-
ables that are used by agents to negotiate with
other system entities.
• Communication module which is composed
mainly of “acquaintances Network” and that en-
ables agent to interact with other agents.
• Behaviour module, which is composed of an
ATN, manages the agent behavior based on his
knowledge.
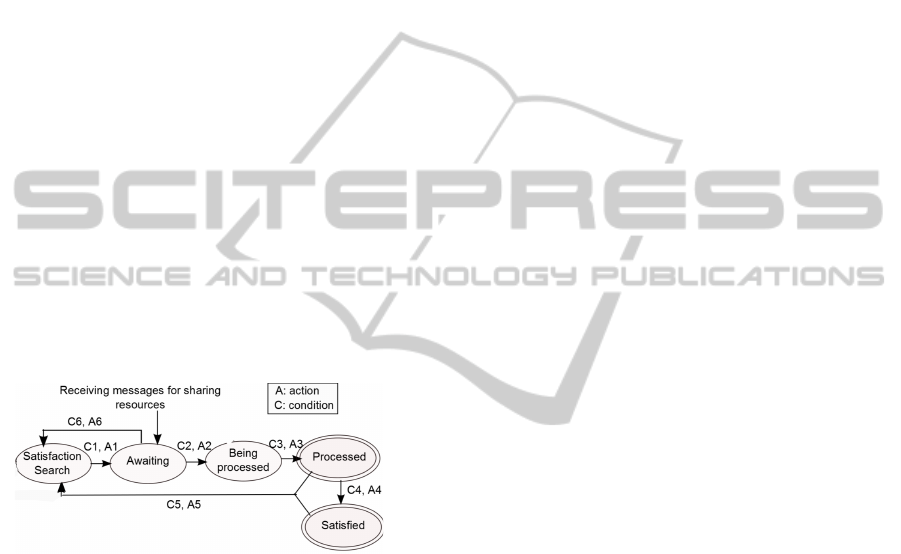
3.3.1 Container Agent
The container is the principal agent of the system.
It changes state while executing a set of actions to
achieve its internal goal. An ATN is used to model its
behaviour and which comprises an initial state, a final
state and a finite set of states as shown in figure 3.
Figure 3: ATN of a container agent.
Satisfaction Search State. When a container agent
needs a resource to be treated (C1), it starts negoti-
ation with other agents having a resource. It broad-
casts therefore a call for proposals indicating its des-
tination, its dimension and its priority (A1) and goes
to state “Awaiting state”. In return, the assigned
container agent, that receives the message, checks
whether the resource sharing will affect its remaining
processing time. This process is performed using the
following equation to select calls. We note that ts
A
is
the service time per affected container and ts
NA
is the
service time per non affected container.
Z = ts
A
− (ts
NA
+ d
A,NA
)
There are two cases:
• If Z < 0, ie if the remaining processing time of
unaffected container adding the elapsed time of
the distance between the affected and unaffected
container agent exceeds the remaining processing
time of affected container , then it rejected the
call.
• If Z ≥ 0, then the affected container agent asks the
resource agent for sharing. The latter accepts or
rejects the request indicating its capacity. Next,
the container agent chooses among the selected
calls the highest priority calls and sends proposals
proportionally to the capacity of agent resource.
Awaiting State. It waits proposals (C2), then col-
lects them and finally accepts the most appropriate
one (A2). In return, the affected container agent sends
a confirmation to resource agent indicating the con-
tainers number that have accepted the proposal of
sharing resource and their identifiers. Then, the re-
source agent broadcasts an information indicating that
it is ready to container agents sharers the resource
agent (C2).
On failure (it does not find proposals for its re-
quest (C6) or it refuses all proposals that do not pos-
sess an adequate destination (A6)), it returns there-
fore to “Satisfaction Search state” (A6). In this state,
it proceeds the coordination with resource agents
through a planner agent by sending a message to the
scheduler indicating its destination, the operation type
and the remaining processing time and switches after
that to “Awating state” (A1). When it receives an in-
formation from planner indicating its assignment to a
resource (C2), it sends a confirmation message to the
resource agent (A2). It receives an information from
resource agent indicating that it is ready (C2) and it
transits to “being processed ”.
Being Processed, Processed and Satisfied States.
In this state the container agent is being processed.
As soon as the treatment is finished (C3), it informs
the scheduler about the end of treatment (A3). Fi-
nally, the container passes from “Processed state” to
“Satisfied state” that presents the final state in which
the container will be processed before the deadline to
ensure their satisfaction (A4) and in which it tries to
stay. If it is satisfied (C5), it returns to the initial state
(A5).
Knowledge module: consists of acquaintances of
container agent are composed of:
• Static knowledge: container id, dimension and na-
ture.
• Dynamic knowledge: Destination, service time,
number of containers to be treated, current pro-
cessing time and operation type.
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
502
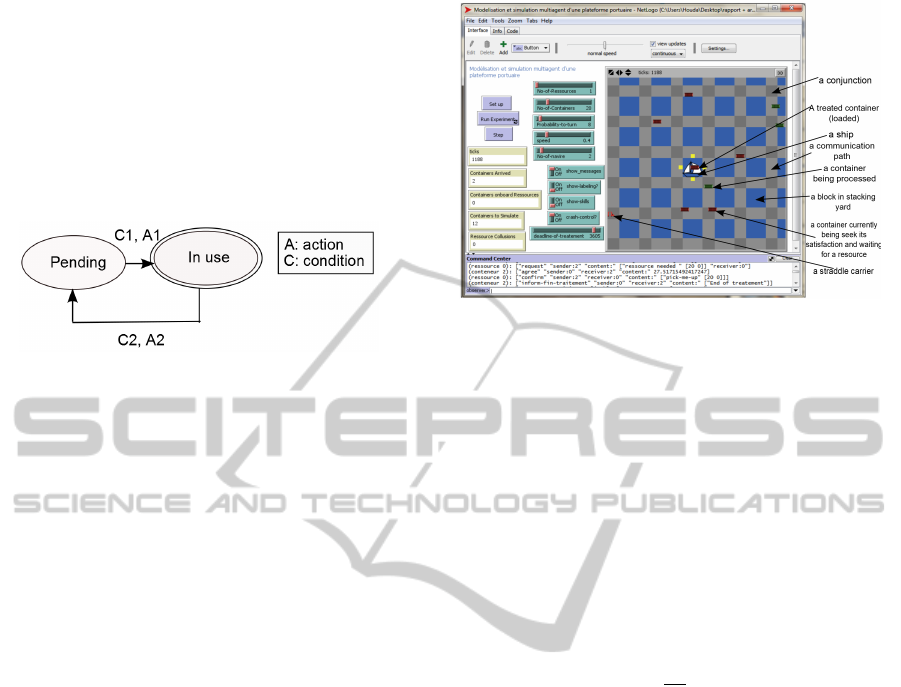
3.3.2 Resource Agent
The resource agent, which is responsible to provide
services is of two types: handling equipment and
transport vehicle. A container treatment is a coher-
ent sequence of a set of tasks. Each state carries roles
and brings a specific version of each service in differ-
ent processes. The ATN of the resource agent has two
states which are (figure 4):
Figure 4: ATN of resource agent.
Pending State: presents the initial state in which the
resource agent is still waiting container requests to en-
sure its satisfaction (C1). When it receives a request
from container agent, it responds to requests accord-
ing to its capacity, the container dimensions and the
type of authorized terrain. In case resource agent ac-
cepts the request (A1), it receives confirmation to start
treatment (C1) and goes to state “In use”.
In Use State: presents the final state in which a re-
source agent moves to the location of the container
and, sends information indicating that it is ready to
the container (A1) and then begins processing. Fi-
nally, when it finishes its processing (C2), it returns to
the initial state “Pending” and informs planner about
the end of treatment (A2).
The knowledge module of a resource agent is
composed of:
• Static knowledge: which are the resource Id, the
resource type, the speed and the capacity.
• Dynamic knowledge: which contains the con-
tainer coordinates, the type of operation and the
location of the ship.
4 RESULTS
Figure 5 shows the entities of the simulation environ-
ment. Entities are composed of straddle carriers that
represent the resource agent, containers that represent
the container agent, ship, communication routes and
junctions. Entities are coded in color to help under-
standing the evolution of the state entities as well as
the system state.
To treat the coordination among agents, we have
established a dialogue between the container agent
and the resource agent using the formalism FIPA /
Figure 5: Simulated container management Layout.
ACL. We chose to simulate the loading operation
to validate the model and to understand the differ-
ent policies in the containers management by altering
some parameters in the purpose of taking and evalu-
ating different decisions. The instance is repeated in
each hour to control the evolution of container behav-
ior as well as the rate of its satisfaction during the sim-
ulation by changing the speed of resource agent and
the number of containers to be processed. The rate
of satisfaction (RoS) is obtained by dividing the num-
ber of satisfied requests per the number of required
requests. We note that N is the number of required
requests and Ns is the number of satisfied requests.
RoS =
Ns
N
∗ 100
Moreover, given the dynamicity of the container
terminal, we investigate the perturbations that can be
made during the treatment of containers. We evalu-
ated , for this purpose in two scenarios, the number of
collisions depending on the speed of resource agent.
According to the results in table 1, scenario 1 and 2
has successively a satisfaction rate of 60% and 36%.
We note, basing-on scenario 1 and 2 that the num-
ber of containers to be treated has a great impact on
the rate of containers satisfaction. In other hand, ac-
cording to a study done by ECMT on 34 terminals,
the number of containers to be treated has a big influ-
ence on the cranes productivity and on the quay ca-
pacity (Chambreuil, 2011). So we can interpret that
the greater a number of containers to be processed
per ship is, the more a number of unsatisfied contain-
ers increases and the more the waiting time increases.
In practice, a quay is considered saturated when it is
used more than 60%. So we have a waiting time at
berth (queuing theory). Also, the number of allocated
cranes depends on the size of container ship and the
number of container to be treated, so the number of
allocated cranes is proportional to the number of con-
Multi-AgentSystemModelforContainerManagementSimulation
503

Table 1: Quality of the solution for the instance # 1.
Sc N speed NoC RoS(%)
Sc 1 20 0.3 0 60
Sc 2 30 0.3 0 36
Sc 3 20 0.6 0 70
Sc 4 30 0.6 0 53
Sc 5 30 1 61 46
Sc 6 30 1.2 73 17
N : number of required requests
NoC: number of collusions
RoS: rate of satisfaction
tainer to be treated. Moreover, according to the hy-
potheses, priority of container p depends on the num-
ber of containers and the number of cranes. Thus,
we can take a decision concerning the setting of the
number of cranes with the aim to increase the pro-
ductivity of cranes and consequently to improve the
rate of satisfaction. We take Scenario 2 and 4 which
integrate two different speeds, Scenario 4 possesses
a higher satisfaction rate comparing with scenario 2.
We were able to validate that the vehicle speed is an
important factor in planning. It varies according to
the vehicle type and the terrain type where it moves.
This explains that the choice of equipment plays an
important role in strategic decision making for an ef-
ficient management of containers. The work of Hene-
sey (Henesey et al., ) implement the different policies
for sequencing, berthing, and stacking on the perfor-
mance of CTs includes additional variables such as
the number of equipment used in a terminal and the
allocated road by the transport vehicle. Finally, if we
take scenario 5 and 6, we note that more the speed in-
creases, greater the number of collusions increases in
the terminal. On the other hand, although the speed
is higher, the rate of satisfaction is lower due to the
disturbances that can happen during treatment of con-
tainers.
5 CONCLUSIONS
In this paper, we modeled a multiagent model to sim-
ulate container management. The model aims to de-
liver goods to customers in time to satisfy them. It in-
volves only container agents and resource agents that
cooperate and negotiate with each other to distribute
tasks among resources and to organize their achieve-
ments over time according to containers priority. We
choose the ATN to describe the internal structure of
agents and MESSAGE method to describe the sys-
tem architecture. We implemented a first prototype
and we extracted a first results in order to test and to
validate the proposed approach. Currently, we pro-
ceed to extend our model using cellular automata for
modeling the location of the containers in a container
terminal.
REFERENCES
Bin, S., Junqing, S., and Qiushuang, C. (2011). On con-
tainer terminal logistics operational and scheduling
management system based on mas. In Control Confer-
ence (CCC), 2011 30th Chinese, pages 5484 –5489.
Caire, G., Garijo, F., Gomez, J., Pavon, J., and Vargas, E.
(2001). Agent oriented analysis using message/uml.
pages 119–135. Springer-Verlag.
Cardon, A. (2003). Mod
´
eliser et concevoir une machine
pensante : approche constructible de la conscience
artificielle. Automates intelligents. Automates intelli-
gents, Paris. Lexique des d
´
efinitions.
CEMT (2006). Terminologie en transports combin
´
es (fran-
cais, anglais, allemand, russe).
Chambreuil, A. (2011). Productivit
´
e des terminaux
`
a con-
teneurs. Le CETMEF.
E.C.M., T. (2005). La s
ˆ
uret
´
e du transport intermodal de
conteneurs. OECD Publishing.
Ferber, J. (1995). Les Syst
`
emes Multi Agents: vers une intel-
ligence collective. Paris, France, intereditions edition.
Govil, M. and Proth, J. (2001). Supply Chain Design
and Management: Strategic and Tactical Perspec-
tives. Academic Press Series in Engineering. Aca-
demic.
Henesey, L. (2006). Multi-agent systems for container ter-
minal management. Blekinge Institute of Technol-
ogy doctoral dissertation series. Blekinge Institute of
Technology.
Henesey, L., Davidsson, P., and Persson, J. Evaluating con-
tainer terminal transhipment operational policies: an
agent-based simulation approach. WSEAS Transac-
tions on Computers, 2006:2090–2098.
Henesey, L. E., Notteboom, T. E., and Davidsson, P.
(2003). Agent-based simulation of stakeholders rela-
tions: An approach to sustainable port and terminal
management. In International Association of Mar-
itime Economists Annual Conference, 2003(a, pages
314–331.
Kefi, M., Ghedira, K., Korbaa, O., and Yim, P. (2009). Con-
tainer handling using multi-agent architecture. Int. J.
Intell. Inf. Database Syst., 3(3):338–360.
Mocellin, F. (2006). Gestion des entrep
ˆ
ots et plates-formes:
Assurez la performance de votre supply chain par
la ma
ˆ
ıtrise des zones de stockage. Fonctions de
l’entreprise. S
´
erie Performance industrielle. Dunod.
Steenken, D., VoB, S., and Stahlbock, R. (2004). Container
terminal operation and operations research, a classifi-
cation and literature review. OR Spectrum, 26:3–49.
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
504

Woods, W. A. (1970). Transition network grammars for nat-
ural language analysis. Commun. ACM, 13(10):591–
606.
Wooldridge, M. (2009). An Introduction to MultiAgent Sys-
tems. John Wiley & Sons.
Multi-AgentSystemModelforContainerManagementSimulation
505
