
Incremental Design of Organic Computing Systems
Moving System Design from Design-time to Runtime
Sven Tomforde
1
, J
¨
org H
¨
ahner
1
and Christian M
¨
uller-Schloer
2
1
Organic Computing Group, University of Augsburg, Eichleitnerstr. 30, 86159 Augsburg, Germany
2
System and Computer Architecture Group, Leibniz University Hannover, Appelstr. 4, 30167 Hannover, Germany
Keywords:
Design Process, System Engineering, Organic Computing, Adaptivity, Intelligent System Control.
Abstract:
System engineers are facing demanding challenges in terms of complexity and interconnectedness. Current
research initiatives like Organic or Autonomic Computing propose to increase the freedom of the system to
be developed using concepts like adaptivity and self-organisation. Adaptivity means that for such systems we
defer a part of the design process from design time to runtime. Therefore, we need a runtime infrastructure
which takes care of runtime modifications. This paper presents a meta-design process to develop adaptive
systems and parametrise the runtime infrastructure in a unified way. To demonstrate the proposed design
process, we applied it to a communication scenario and evaluate the resulting system in a realistic setting.
1 INTRODUCTION
Nowadays, the vision of Ubiquitous Computing
(Weiser, 1991) becomes increasingly realistic. Tech-
nology has become a fundamental part of human
lives and supports us embedded in the environments
that we encounter on a daily basis. Engineers build
technology-driven environments, where systems ob-
serve the conditions in the real world, derive plans of
how to act best in this environment, try to draw con-
clusions from observed behaviour, and finally act pro-
actively by applying actions and manipulating this en-
vironment. Recent research initiatives like Organic
Computing (OC), cf. (M
¨
uller-Schloer, 2004), develop
novel concepts to be able to handle the resulting com-
plex systems. In this context, OC focuses on develop-
ing autonomous entities that are acting without strict
central control and achieve global goals although their
decisions are based on local knowledge. Due to the
complexity of the particular tasks, not all possibly oc-
curring situations can be foreseen during the devel-
opment process of the system. Therefore, the system
must be adaptive and equipped with learning capabil-
ities, which leads to the ability to learn new strategies
for previously unknown situations.
OC postulates to move design time decisions as
typically taken by engineers to runtime and into the
responsibility of the OC system itself. Hence, such
an OC system requires a self-adaptation mechanism
which is generic in the sense that it is not designed
especially for each application. Instead, this mech-
anism forms a runtime infrastructure which must be
adapted to the particular problem using well-defined
parametrisable steps. This leads to a meta-design pro-
cess whose results provide the parametrisations of the
online adaptation mechanism.
This paper is organised as follows. Section 2 de-
scribes the architectural concept of OC systems, the
specific demands for an appropriate meta-design pro-
cess and the difference to traditional concepts. After-
wards, Section 3 introduces the novel process in de-
tail. This is evaluated using an example application
from the data communication domain in Section 4.
Finally, Section 5 summarises the paper and gives a
short outlook on current and future work.
2 SYSTEM DESIGN
This section discusses the basic system design for
OC according to the Multi-level Observer/Controller
(MLOC) framework (Tomforde, 2012). MLOC is a
three-layered framework that implements the desired
self-adaptation mechanism. Thereby, each of the lay-
ers has a certain functionality that has impact on the
design process introduced in this paper. Afterwards,
we give a brief overview of design processes and ex-
plain why a novel meta-process to incrementally de-
sign adaptive systems is needed.
185
Tomforde S., Hähner J. and Müller-Schloer C..
Incremental Design of Organic Computing Systems - Moving System Design from Design-Time to Runtime.
DOI: 10.5220/0004457901850192
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 185-192
ISBN: 978-989-8565-70-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
2.1 Observer/Controller Design
The MLOC framework for learning and self-
optimising systems provides a unified approach to au-
tomatically adapt technical systems to changing envi-
ronments, to learn the best adaptation strategy, and to
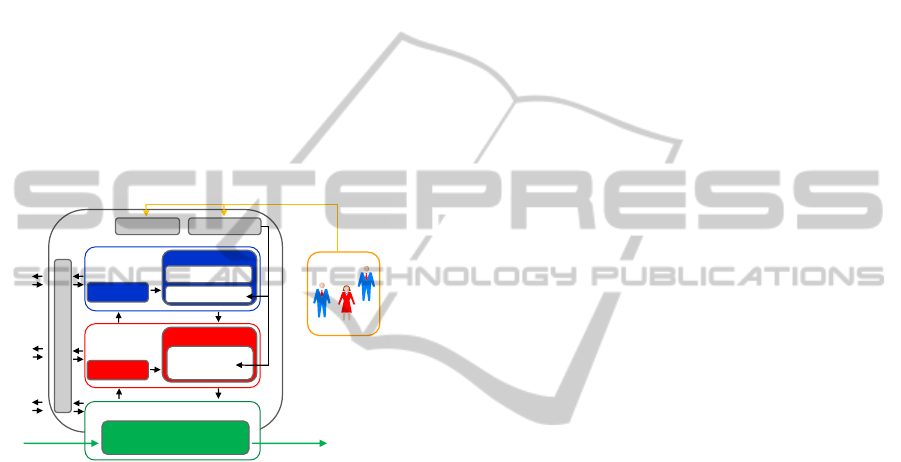
explore new behaviours autonomously. Figure 1 illus-
trates the encapsulation of different tasks by separate
layers. Layer 0 encapsulates the system’s productive
logic (the System under Observation and Control –
SuOC) which is parametrisable in terms of variable
configurations. Layer 1 establishes a control loop
with safety-based on-line learning capabilities, while
Layer 2 evolves the most-promising reactions to pre-
viously unknown situations. Layer 3 provides inter-
faces to the user and to neighbouring systems. Details
on the design approach, technical applications, and
related concepts can be found in (Tomforde, 2012).
Layer 3
Layer 0
Detector
data
Control
signals
User
System under Observation
and Control
Layer 1
Parameter selection
Observer
Controller
modified XCS
Layer 2
Offline learning
Observer
Controller
Simulator
EA
Collaboration mechanisms
Monitoring Goal Mgmt.
Figure 1: System Design.
2.2 Design Time to Runtime
OC systems are characterised by attributes like self-
organisation, self-configuration, self-protection, or
self-explanation. In consequence, this means that at
least a part of the design effort moves from design
time to runtime. OC therefore means to move design
time decisions to runtime. This relocation of design
activities comprises five aspects:
1) Runtime Exploration: Design space exploration
in traditional system design discovers all possibly oc-
curring situations during the design time, while OC
systems explore the configuration space using its Lay-
ers 1 and 2 at runtime.
2) Runtime Optimisation: The control mechanism
defined by Layers 1 and 2 of the MLOC framework
continuously optimises the performance of the OC
system. Thereby, especially the simulation-coupled
optimisation component of Layer 2 has to work un-
der certain constraints, since only limited computing
resources and time are available.
3) Online Validation: Searching the configuration
space for the optimal parameter setting in a certain
situation relies on the possibility to validate candi-
date solutions. In OC systems, this validation takes
place at runtime. Since approaches like trial-and-error
mean that bad (or illegal) solutions are tried out in re-
ality, OC proposes to use a sandbox approach where
solutions are validated in a simulated environment
(i.e. the simulation environment of Layer 2).
4) Continuous Revision: While classical design pro-
cesses freeze the design at a certain point in time and
the result goes into production, OC systems have to
work without freezing. This leads to a continuous
runtime reconfiguration process where all, even the
higher-level, design decisions must be adaptive and
changeable at runtime.
5) Runtime Yo-Yo Design: Current design and devel-
opment processes use models at design time to vali-
date the system before it is actually built. In OC, how-
ever, two different flavours of these models have to be
distinguished: a) prescriptive models reflect the clas-
sical top-down enforcement and b) descriptive mod-
els reflect the actual system state. As both models
are not necessarily always consistent, possible con-
tradictions have to be resolved or at least minimised
– which leads to a runtime version of Yo-Yo design.
Runtime modelling is currently gaining high interest
(e.g. for self-adaptive systems (Amoui et al., 2012)).
These five aspects of moving design time deci-
sions into the responsibility of the self-adaptation
mechanism of the organic system and into the run-
time define the specific requirements of OC for an
appropriate design process. Considering such a de-
sign process from a more general perspective, a di-
chotomy that partitions adaptive systems according to
the targeted functionality can be observed. One part is
(similar to traditional approaches) responsible for the
productive logic part, while the other part implements
the self-adaptivity aspects. Since traditional design
processes cover only the productive part, these five
aspects are novel and hence define the need of an OC-
specific approach. This assumption is substantiated in
the following by discussing the most prominent de-
sign and development processes as well as their ap-
plicability to the design of OC systems.
2.3 Related Work
The organisation and definition of design and devel-
opment processes has gained a high degree of at-
tention by research and industry since fast and suc-
cessful projects are a key factor for controlling costs.
As a result, approaches following different direc-
tions can be found in literature. Thereby, the most
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
186
prominent representatives belong to the field of it-
erative and incremental development (Larman and
Basili, 2003). These are the Waterfall model (Royce,
1988), V-model (Forsberg and Mooz, 1991) (and its
extension, the Dual-Vee model (Forsberg and Mooz,
1995)), the Y-Chart model (Gajski et al., 2003) or the
Spiral-model (Boehm, 1986) that all distinguish be-
tween several consecutive development phases, e.g.
describing a general concept of operations, refining
the system description iteratively with decreasing ab-
straction until a detailed design exists, and finally im-
plementing the description accordingly and testing it.
Here, the overall process is organised according to the
ongoing timeline of the project.
Besides these standard concepts, several more
hardware-driven approaches like the Design Cube
Model (Ecker and Hofmeister, 1992) or more re-
cent developments like the Chaos model (Raccoon,
1995) and agile methods (Erickson et al., 2005) can
be found. In addition, researchers focused on build-
ing reliable software in the sense of guaranteeing
the system’s correctness (see e.g. (Good, 1982), or
(Nafz et al., 2011) with a certain OC background). A
good overview of current design methodologies can
be found in (Pressman, 2012). All these processes
lack the possibility of applying them to the devel-
opment of OC systems due to a variety of reasons.
First, the most important OC aspect of moving the
design time optimisation process into the responsibil-
ity of the system itself at runtime is not addressed.
Instead, a generalised and time-line-based approach
is followed in most of the classic approaches. OC’s
structure is aligned according to the capabilities in-
stead of the time-line. In this context, the Yo-Yo ap-
proach is closest to what we want to achieve with OC
systems in terms of changing between top-down and
bottom-up constraints – but Yo-Yo design is meant as
a design-time process only.
Furthermore, all (including higher-level) design
decisions have to be revised continuously in OC sys-
tems (technically, this is limited by the constraints
of runtime-reconfigurable software or hardware so-
lutions). On the other hand, formal approaches are
hardly applicable due to vast situation and configura-
tion spaces and the entailed impossibility to anticipate
all potentially occurring situations and best responses
at design time. This leads to the insight that the gen-
eral design of OC systems requires a meta-design pro-
cess including runtime reconfiguration rather than a
standard organisational process structure for the de-
sign time part. The architectural concept as illustrated
by Figure 1 specifies three layers on top of the classi-
cal productive part of the system – comprising in to-
tal the application-independent self-adaptation mech-
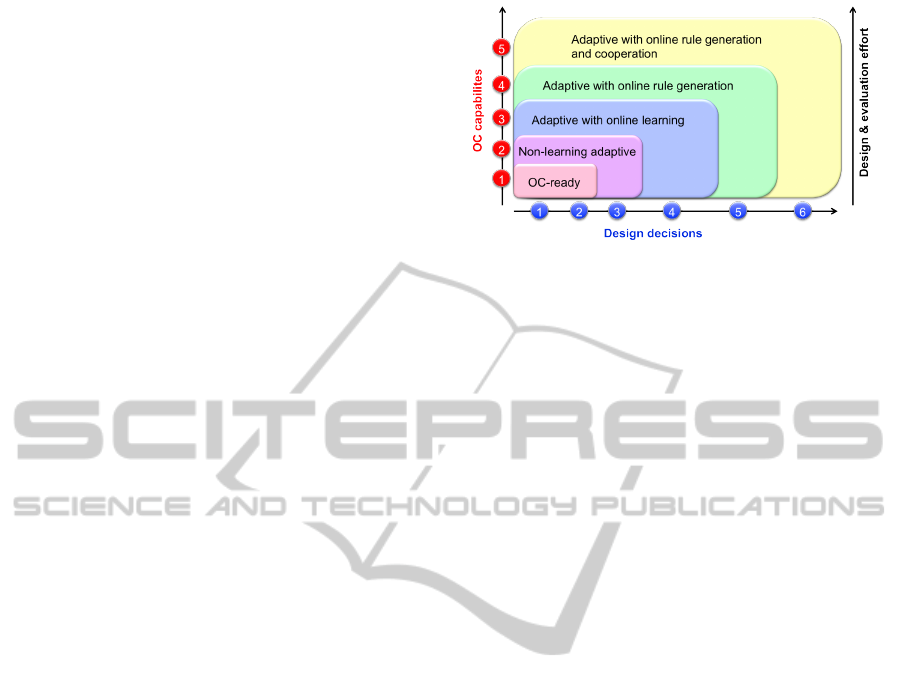
Figure 2: OC capabilities vs. design decisions.
anism. The task of an OC design process is to adapt
this generic mechanism to the particular problem us-
ing well-defined parametrisable steps.
3 INCREMENTAL DESIGN
OF ADAPTIVE SYSTEMS
The design of OC systems according to MLOC (see
Figure 1) describes a canonical way of adding self-
organised adaptivity and self-optimisation functional-
ity to a productive system. MLOC’s basic assump-
tion is that the productive part of the system – the
SuOC – is handled as an observable and parametris-
able black box. Accordingly, the control mechanism
defined by higher-layered O/C components does not
need detailed knowledge about what certain variable
parameters mean. In this context, the control mecha-
nism itself can be characterised by an increasing de-
gree of sophistication – depending on the design ef-
fort: increasing degree means that an OC system has
more possibilities to observe and analyse its state and
the environmental conditions as well as reacting more
appropriately to these. Considering the design pro-
cess and the corresponding effort, a system with a
lower degree of capabilities requires fewer design de-
cisions (see Figure 2). The next part explains the dif-
ferent capabilities named in Figure 2 in detail (a set of
six consecutive design decisions that have to be taken)
and combines them to a meta-design process.
(1) Observation Model: The first design decision
is concerned with the attributes to be observed. All
internal and environmental attributes with impact on
a) the adaptation or b) the process of measuring the
system performance need to be available.
(2) Configuration Model: The second design de-
cision defines the configuration interface to the pro-
ductive system – which parameters of the SuOC can
be altered at runtime in general and which are actually
subject to control interventions?
(3) Similarity Metric: Due to the possibly vast
IncrementalDesignofOrganicComputingSystems-MovingSystemDesignfromDesign-TimetoRuntime
187

situation and configuration spaces, OC systems have
to cope with an unbounded number of possibilities to
configure the SuOC. In order to initially close the con-
trol loop by activating a rule-based reconfiguration
mechanism, a quantification of similarity between sit-
uations is needed. This similarity serves as basis for
choosing the best available configuration for the cur-
rently observed situation.
(4) Performance Metric: Classical system de-
velopment is based on (mostly hard-coded) implicit
goals. In contrast, OC systems have to deal with ex-
plicit goals that are user-configurable at runtime – the
O/C component uses these goals to guide the system’s
behaviour. Automated (machine) learning needs feed-
back to distinguish between good and bad decisions
without the need of an external expert. In this con-
text, feedback is a quantification method for evaluat-
ing the system performance at runtime. It is derived
from observations in each step of the O/C loop.
(5) Validation Method: Automated machine
learning has two severe drawbacks: a) it is strongly
based on trial-and-error and b) it needs a large num-
ber of evaluations to find the best solution. MLOC
handles this problem by dividing the learning task
into two parts: a) online learning works on existing
and tested rules only, while b) offline learning in an
isolated environment explores novel behaviour with-
out affecting the system’s productive part. The sec-
ond aspect can be implemented using computational
models, approximation formulas, or simulation (test
actions under realistic conditions and therefore evalu-
ate their behaviour in a specific situation). The former
two are seldom available, but would be favoured over
the latter one due to quality and time reasons.
(6) Cooperation Method: OC distributes com-
putational intelligence among large populations of
smaller entities. These entities cooperate to achieve
common goals. In order to allow for such a division of
work between a set of self-motivated elements, com-
munication and social interaction are needed. Hence,
cooperation methods and standardised communica-
tion schemes are needed.
The idea of OC is to move design time decisions
to runtime. At runtime, the systems make their deci-
sions autonomously. Depending on the application,
this is potentially dangerous. This means that the
design process has to be planned carefully such that
the power of decision is transferred gradually from
the designer to the O/C structure. Three main de-
sign phases are defined, with each phase resulting in a
system with increasing autonomy and requiring more
validation (see Figure 3).
Phase 1: Preparation (OC-ready). The first
phase prepares a system for a later addition of higher-
Preparation:
OC-ready
• Definition of OC capabilities, models,
metrices, and methods.
• Implementation of interfaces.
Evaluation:
Open OC
Loop
• Offline analysis mode: data collection & analysis.
• Assistance mode: explicit user acknowledgement.
• Supervised mode: Automated O/C decisions.
Utilisation:
Closed OC
Loop
• Unsupervised operation.
Figure 3: The three OC design phases.
level OC capabilities by defining observation and con-
figuration models and interfaces. Building all new
systems OC-ready might be advantageous, regardless
whether these interfaces are later used or not.
Phase 2: Evaluation (Open O/C Loop). The
second phase adds observer(s) and controller(s) to the
system. This requires at least the definition of a sim-
ilarity metric. For higher degrees of OC capabilities,
further OC capabilities like a performance metric or
an online validation method have to be defined. This
phase stepwise closes the O/C loop. Initially, the eval-
uation begins by collecting and aggregating observa-
tion data and analysing them offline. In a second step,
the O/C loop is open and works in assistance mode,
i.e. the controller suggests certain control actions to
the user who has to explicitly acknowledge them be-
fore enactment. In the third step (supervised mode),
the O/C loop is closed but the situation observations
and the according actions are logged for a later offline
analysis in case of wrong decisions.
Phase 3: Utilisation (Closed O/C Loop). Finally
in the third phase, the systems work with closed O/C
loop and, at least in principle, without super-vision.
4 EVALUATION
The basic design approach as presented in Section 2.1
has been applied to various application scenarios,
including vehicular traffic control, production, and
mainframe systems (Tomforde, 2012). In the follow-
ing, we demonstrate the OC design process by apply-
ing it to an example application from the data com-
munication domain – the Organic Network Control
(ONC) system (Tomforde et al., 2011). Thereby, the
design decisions are discussed in detail and the be-
haviour of the resulting OC system is analysed using a
simulation-based approach. ONC has been developed
to dynamically adapt parameters of data communica-
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
188

tion protocols (i.e. buffer sizes, delays, or counters)
in response to changing environmental conditions. It
learns the best mapping between an observed situa-
tion of the environment and the most promising re-
sponse in terms of a parameter configuration. ONC
has been successfully applied to different types of
protocols, including mode-selection in wireless sen-
sor networks, BitTorrent as exemplary Peer-to-Peer
client, and mobile ad-hoc networks (MANets) (Tom-
forde et al., 2011). In the context of this paper, we
consider a reliable broadcast protocol for MANets
(the R-BCast, details on the protocol can be found in
(Kunz, 2003)) as application scenario for ONC.
4.1 Design Decisions for Organic
Network Control
(1) Observation Model: In a MANet environment,
the most important factor influencing the protocol’s
performance is the distribution of other nodes. Typi-
cally, the transmission range for Wifi-based MANets
is about 250 meter (the sending distance, while the
sensing distance is 500 meter). Therefore, a sector-
based approach as depicted in Figure 4 has been de-
veloped. The radius of the outer circle is equal to
the sensing distance of the node, as this is the most
remote point where messages of this node can inter-
fere with other ones. As nodes within the first cir-
cle are really close (50m), their exact position has no
impact. In contrast, the direction of the neighbour
becomes increasingly important for the second circle
(125m – 4 sectors), the third circle (200m – 8 sec-
tors), and the forth circle (250m – 16 sectors). Within
sensing range, two circles (375m and 500m) are in-
troduced and divided into 32 sectors each. A node is
assumed to be able to determine the current positions
of its neighbours in sensing range relative to its own
position, e.g. based on GPS, see (Pahlavan and Krish-
namurthy, 2001). Additionally, the node’s direction
of movement is stored since it has high influence on
the best parameter set. Due to the sector-based ap-
proach, situations are generalised, which is necessary
to avoid evolving a rule for each situation.
(2) Configuration Model: The configuration
model describes the possibilities of the OC system to
automatically manipulate the broadcast algorithm at
runtime. Here, we re-use the configuration possibili-
ties provided by the author of the protocol (which he
configured once at design time and kept static after-
wards). Table 1 lists the parameters and their config-
uration in the static case.
(3) Similarity Metric: A rule-based selection of
SuOC configurations has to discover the most promis-
ing rule in terms of a configuration set that is most-
Figure 4: Environment representation.
Table 1: Variable parameters of the R-BCast protocol.
Parameter Standard configuration
Delay 0.1 s
AllowedHelloLoss 3 messages
HelloInterval 2.0 s
δHelloInterval 0.5 s
Packet count 30 messages
Minimum difference 0.7 s
NACK timeout 0.2 s
NACK retries 3 retries
related to the currently observed situation. Therefore,
the system has to be able to compare situation de-
scriptions which is done based on a similarity met-
ric. In step 1, the situation description has been de-
fined as sector-based encryption of occurring nodes
in the neighbourhood. A measure for the similar-
ity of two entities (A, B) to determine the distance,
needs to deduct the possible influence of rotation
and reflection, initially. Afterwards, the formula for
the distance (δ) can be defined with r ∈ RADII and
s ∈ SECT ORS as follows:
δ(A,B) =
∑
r
∑
s
(A
r,s
− B
r,s
)
2
/r.distance
The function r.distance defines the radius size as
introduced before (50m, 125m, . . . ). A
r,s
gives the
number of neighbours within the sector s of radius
r for the situation description A. This means that the
importance of a node’s neighbour decreases if it is sit-
uated within an outer radius.
(4) Performance Metric: The learning mecha-
nism needs an online feedback to draw conclusions
from its past actions. In the context of MANet broad-
cast algorithms, Packet Delivery Ratio and Packet
Latency have to be considered. Both metrics are
network-wide figures and cannot be used at each node
locally. Nevertheless, the system aims at approxi-
mating both effects by reducing the number of for-
warded broadcasts and simultaneously assuring the
IncrementalDesignofOrganicComputingSystems-MovingSystemDesignfromDesign-TimetoRuntime
189

delivery of each broadcast. To achieve this, the fol-
lowing fitness function (Fit(x)) has been developed:
Fit(x) =
#RecMess
#FwMess
. Here, x represents the currently
observed network protocol instance. Since a new pa-
rameter set has to be applied for a minimum duration
to show its performance, evaluation cycles are used
defining discrete time slots – the control loop consist-
ing of Layers 0 and 1 is performed once every evalu-
ation cycle. The duration of these cycles depends on
how dynamic an environment is. The faster the en-
vironment changes, the shorter is the cycle (and the
more often is the SuOC adapted). Thus, the formula
above takes all messages sent and received within the
last cycle into account. It divides the sum of all re-
ceived messages (#RecMess) by the sum of all for-
warded messages (#FwMess). As a result, high effort
(unnecessary forwards) and low delivery rates (not
successful broadcasts) are penalised.
(5) Validation Method: The online validation of
the Layer 2 component re-uses the protocol’s imple-
mentation within the network simulation tool NS-2
(Fall, 1999). Thereby, the neighbouring nodes from
the node encoding of step 1 are initialised in rela-
tion to the simulated node’s position based on a ran-
domised approach within the particular sector. After-
wards, all nodes besides the simulated one are kept
static (i.e. they are not moving) which is a reasonable
approximation depending on short cycle rates.
(6) Cooperation Method: Cooperation e.g. al-
lows for knowledge sharing between nodes (Tom-
forde et al., 2011). Further collaboration mechanisms
are part of current research initiatives.
4.2 Experimental Results
The experimental setup has been chosen as follows.
The simulation environment is implemented in JAVA
using the Multi-Agent Simulation Toolkit MASON
(Luke et al., 2004). Within the simulated area of 1000
x 1000 meters, six agents are created at random po-
sitions and move according to a random-waypoint-
model (Lawler and Limic, 2010). From these agents,
one is equipped with the ONC system and the other
five agents perform the standard protocol configura-
tion. The sampling rate of ONC’s Layer 1 is set
to 1 s. The simulation relies on pseudo-randomised
movements by taking seeds into account – which
makes them repeatable and comparable to the usage
of the protocol’s standard configuration. The inves-
tigated simulation period covers seven hours; the re-
sults are discretised to blocks of half an hour each.
The evaluation compares an OC-ready variant (i.e.
the standard protocol version equipped with inter-
faces to observe it), an Open O/C Loop variant, and
a Closed O/C Loop variant (with and without experi-
ence). Thereby, the Open O/C Loop variant is mod-
elled by taking a pre-defined rule-base into account
that covers randomly chosen 10% of the occurring sit-
uations. The inexperienced Closed Loop variant starts
with an empty rule-base, while the experienced one
relies on the feedback and Layer 2 rule generations re-
ceived during three consecutive simulation runs. All
results are averaged values of 5 simulation runs.
The first part of the evaluation analyses the general
impact of the additional ONC control in this scenario.
ONC’s goal contains two aspects: assure the deliv-
ery of broadcasts and decrease the overhead needed
to achieve this delivery. Since deliveries of broad-
casts can only be considered at network-level, all mes-
sages during the whole simulation are analysed. Fig-
ure 5 illustrates the delivery ratio of broadcast mes-
sages, which is defined as the number of received dis-
tinct broadcasts divided by the number of sent broad-
casts and the number of agent that have to receive
this broadcast. The figure illustrates the desired ef-
fect. The OC-ready solution – which is the proto-
col’s standard configuration for all six agents – re-
ported a delivery ratio of 98.73 % on average, which is
clearly improved by the ONC-control. The Open O/C
Loop variant resulted in a delivery ratio of 99.05%,
the Closed O/C Loop without experience variant in a
delivery ratio of 99.15%, and the Closed O/C Loop
with experience variant in a delivery ratio of 99.41 %
(all values are averages over the complete simulation
time). The second aspect in this context is the latency
needed to achieve this delivery ratio. The latency val-
ues have been determined as the averaged time to de-
liver a unique broadcast to a receiver. All four val-
ues (OC-ready, Open O/C Loop, Closed O/C Loop,
and Closed O/C Loop with experience)) are within a
similar range – the maximum deviation between two
values is 0.98%. Thus, the impact of ONC on the
latencies can be neglected.
The second part of the objective function aims at
minimising the overhead needed to deliver the broad-
casts successfully. In this context, overhead is de-
fined as all messages that do not belong to the dis-
tinct broadcast message delivered to each of the other
agents. In particular, this includes non-broadcast mes-
sages (e.g. NACK messages or “hello”-messages) and
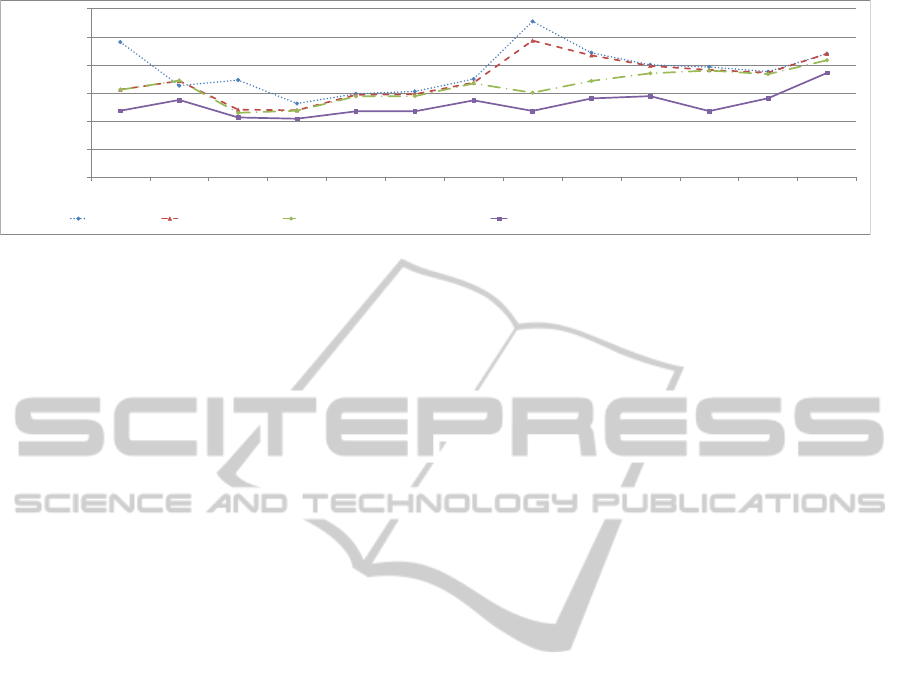
broadcast duplicates or re-transmissions. Figure 6 de-
picts the results for all four simulations. The OC-
ready variant resulted in an average number of 45,785
overhead messages. This value has been decreased
in case of an activated ONC for one agent. The
Open O/C Loop variant resulted in 45, 142 overhead
messages (decrease of 1.41 %), the Closed O/C Loop
without experience variant resulted in 44,625 over-
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
190

0,978
0,98
0,982
0,984
0,986
0,988
0,99
0,992
0,994
0,996
0,998
1
0:30 1:00 1:30 2:00 2:30 3:00 3:30 4:00 4:30 5:00 5:30 6:00 6:30
Delivery Ratio
Simulation time (hour)
OC-ready Open O/C Loop Closed O/C Loop w/o experience Closed O/C Loop w/ experience
Figure 5: Delivery ratio of broadcast messages (higher values are better) for the four compared variants.
head messages (decrease of 2.60 %), and the Closed
O/C Loop with experience variant resulted in 43,406
overhead messages (decrease of 5.19%). This means,
that the capacity of the network has been increased
between 1.41 and up to 5.19% due to ONC control
– which is a significant improvement. Considering
the figure, all three ONC-based solutions are better
than the OC-ready variant (i.e. the reference solution)
– besides the overhead between 30 and 60 simulated
minutes. In this case, the standard configuration of
the protocol leads to better results than the Open O/C
Loop and Closed O/C Loop without experience ver-
sions. But this effect decreases with increasing capa-
bilities and therefore a longer learning duration.
The third part of the evaluation covers the as-
pect of analysing the required effort caused to achieve
the particular behaviour. This aspect is concerned
with the rule-generation and the SuOC-adaptation be-
haviour of ONC. Therefore, the following part in-
vestigates: a) the development of the rule base over
time, b) the closely-connected number of Layer 2
optimisations during the simulation period, and c)
the adaptation-demand realised by ONC. Due to the
setup, the population is kept static for the Open O/C
Loop variant – here, Layer 2 is not active. The
Closed Loop variants without and with experience
differ mainly due to the need of new rules. The for-
mer variant has to make heavy use of its Layer 2
component to discover novel behaviour, leading to
2,170rule-generations during the simulated period.
In contrast, the experienced variant got along with
139rule generations. Hence, the rule-base is con-
stantly increasing for the inexperienced variant, while
being nearly static for the experienced one.
Finally, the effort can be estimated analytically.
The sampling interval has been chosen as 1 s, which
means that the ONC-controlled agent had the oppor-
tunity to adapt its SuOC 3,600 times per simulated
hour. Analysis of the data showed that the Layer 1
component constantly took advantage of this possi-
bility to about 90 % each hour in all three variants.
Thus, every 10th chance to adapt the SuOC has not
been used. In general, the number of adaptations
corresponds to the speed at which the neighbour-
hood changes (and consequently to the nodes’ move-
ment speeds). Choosing lower movement speeds
would decrease the number of adaptations signifi-
cantly. But as choosing an appropriate rule depends
on a linear search of the rule base and the size of
the rule base converges to about 3,000 rules, the ef-
fort is manageable. Summarisingly, ONC control of
a MANet-based broadcast algorithm has been suc-
cessful. The overhead caused by retransmissions and
“hello”-messages has been significantly decreased,
while the delivery of broadcasts has been improved.
5 CONCLUSIONS
Standard design processes are not applicable to novel
demands like moving parts of the design time ef-
fort to runtime and into the responsibility of or-
ganic systems, which leads to a novel meta-design
process for the incremental development of adap-
tive systems as presented in this paper. This
novel design process provides a modularised concept
for building different stages of Organic Computing
(OC) systems ranging from an OC-ready variant to
an open Observer/Controller loop to a closed Ob-
server/Controller variant. These three stages are char-
acterised by an increasing degree of autonomy. In or-
der to demonstrate the increasing capabilities of the
OC system resulting from the novel process, an ap-
plication scenario from the data communication do-
main has been chosen. Here, the increased perfor-
mance of the control mechanism defined by the Ob-
server/Controller component has been shown in terms
of domain-specific metrics like Delivery Ratio and
Overhead (in terms of messages).
Current and future work will focus on both aspects
covered in this paper: the meta-design process and
the application scenario. For the design process, ap-
proaches to generalise the collaboration part as out-
IncrementalDesignofOrganicComputingSystems-MovingSystemDesignfromDesign-TimetoRuntime
191
19000
20000
21000
22000
23000
24000
25000
0:30 1:00 1:30 2:00 2:30 3:00 3:30 4:00 4:30 5:00 5:30 6:00 6:30
Overhaed (messages)
Simulation time (hour)
OC-ready Open O/C Loop Closed O/C Loop w/o experience Closed O/C Loop w/ experience
Figure 6: Overhead in messages (lower values are better) for the four compared variants.
lined by the sixth capability are needed – here, es-
pecially an automated detection of dependencies be-
tween control and observation parameters of neigh-
bouring systems would be useful in order to further
improve the quality of the adaptation process. In con-
trast, the network control example will be extended
by covering multiple protocols or physical resources
(e.g. switches using the Open Flow standard) instead
of one single protocol.
REFERENCES
Amoui, M., Derakhshanmanesh, M., Ebert, J., and Tahvil-
dari, L. (2012). Achieving dynamic adaptation via
management and interpretation of runtime models. J.
of Systems and Software, 85(12):2720 – 2737.
Boehm, B. (1986). A Spiral Model of Software Develop-
ment and Enhancement. ACM SIGSOFT Software En-
gineering Notes, 11(4):14 – 24.
Ecker, W. and Hofmeister, M. (1992). The design cube-a
model for vhdl designflow representation. In Design
Automation Conference, pages 752 –757.
Erickson, J., Lyytinen, K., and Siau, K. (2005). Agile
Modeling, Agile Software Development, and Extreme
Programming: The State of Research. Journal of
Database Management, 16(4):88 – 100.
Fall, K. (1999). Network Emulation in the Vint/NS Simu-
lator. In Proc. of 4th IEEE Symp. on Computers and
Communications (ISCC’99), page 244. IEEE.
Forsberg, K. and Mooz, H. (1991). The Relationship of Sys-
tem Engineering to the Project Cycle. In Proc. Symp.
of Nat. Council on System Eng., pages 57 – 65.
Forsberg, K. and Mooz, H. (1995). Application of the Vee to
Incremental and Evolutionary Development. In Proc.
of Nat. Council for Sys. Eng., pages 801 – 808.
Gajski, D., Peng, J., Gerstlauer, A., Yu, H., and Shin,
D. (2003). System Design Methodology and Tools.
Technical Report CECS-03-02, Center for Embedded
Computer Systems University of California, Irvine.
Good, D. I. (1982). The Proof of a Distributed System in
GYPSY. Technical Report 30, Institute for Comput-
ing Science, The University of Texas at Austin.
Kunz, T. (2003). Reliable Multicasting in MANETs. PhD
thesis, Carleton University.
Larman, C. and Basili, V. (2003). Iterative and incremental
development: A brief history. Computer, 36:47–56.
Lawler, G. F. and Limic, V. (2010). Random walk : a
modern introduction. Cambridge Studies in Advanced
Mathematics. Cambridge University Press.
Luke, S., Cioffi-Revilla, C., Panait, L., and Sullivan, K.
(2004). MASON: A New Multi-Agent Simulation
Toolkit. In Proc. of the 2004 Swarmfest Workshop.
M
¨
uller-Schloer, C. (2004). Organic Computing: On the fea-
sibility of controlled emergence. In Proc. of CODES
and ISSS, pages 2–5. ACM.
Nafz, F., Seebach, H., Stegh
¨
ofer, J.-P., Anders, G., and Reif,
W. (2011). Constraining Self-organisation Through
Corridors of Correct Behaviour: The Restore Invariant
Approach. In Organic Computing – A Paradigm Shift
for Complex Systems, pages 79 – 93. Birkh
¨
auser.
Pahlavan, K. and Krishnamurthy, P. (2001). Principles of
Wireless Networks: A Unified Approach. Prentice Hall
PTR, Upper Saddle River, NJ, USA.
Pressman, R. (2012). Software Engineering: A Practi-
tioner’s Approach. McGraw Hill, Boston, US.
Raccoon, L. B. S. (1995). The chaos model and the chaos
cycle. SIGSOFT Softw. Eng. Notes, 20(1):55–66.
Royce, W. W. (1988). The development of large software
systems. Software Engineering Project Management,
pages 1 – 9.
Tomforde, S. (2012). Runtime adaptation of tech-
nical systems: An architectural framework for
self-configuration and self-improvement at runtime.
S
¨
udwestdeutscher Verlag f
¨
ur Hochschulschriften.
ISBN: 978-3838131337.
Tomforde, S., Hurling, B., and H
¨
ahner, J. (2011). Dis-
tributed Network Protocol Parameter Adaptation in
Mobile Ad-Hoc Networks. In Informatics in Control,
Automation and Robotics, volume 89 of LNEE, pages
91 – 104. Springer.
Weiser, M. (1991). The computer for the 21st century. Sci-
entific American, 265(3):66–75.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
192
