
Graph Partitioning Algorithm for Social Network Model
Transformation Frameworks
Gergely Mezei, László Deák, Krisztián Fekete and Tamás Vajk
Department of Automation and Applied Informatics, Budapest University of Technology and Economics,
Magyar tudósok krt. 2. Q, Budapest, 1117, Hungary
Keywords: Graph Partitioning, Model Transformation, Cloud Computing, KL Algorithm, Social Networks.
Abstract: Dealing with extra-large models in software modeling is getting more and more common. In these cases,
both memory and computational capacity of a single computer might be insufficient. A solution to
overcome this barrier is to use cloud computing. However, existing algorithms have to be
extended/modified to support cloud computing and use the advantages of its architecture efficiently. We
focus on creating an algorithm to partition graphs representing models. Based on the algorithm, models
should be able to be mapped onto several computational instances and processed in a distributed fashion
efficiently. Previously, we have presented an algorithm that was based on the heuristic Kernighan-Lin
partitioning method with two extensions: no limit on the number of partitions and not building on the
knowledge of the whole model at beginning (nodes are received and processed one by one). However, when
applying social network-based case studies, we have identified weaknesses of the algorithm. This paper
elaborates an enhanced algorithm that produces better results for extra-large models. Detailed measurements
are also presented in order to show the improvement.
1 INTRODUCTION
Nowadays, software modeling has become a usual
pattern in software development. We often meet
extra-large models from different segments of the
industry. For example refactoring a huge, industrial
source code model, processing bio-chemical systems
and examination of DNA related processes requires
huge storage and computational resources, or
processing complex embedded systems to locate
errors. Similarly, working with social network
models is also not an easy. These networks tend to
contain millions and sometime even more than one
billion users (Facebook, 2012). Models of this size
may require TBs of space. Supporting these models
and offer an efficient solution to process them is a
challenging task. We are not always able to use the
usual, comfortable technique of loading the whole
model into the memory of a computer. One solution
can be to partition our model and to use a network of
computers to store and process the model parts. It is
not easy to achieve this though.
Our modeling approach focuses on domain-
specific models (Fowler, 2010), where models are
often processed and transformed into another models
or artifacts. For example, you can specify a pattern,
when suggesting groups based on your interest,
friends and previous posts. Finding an appropriate
suggestion and updating the model can be applied by
model transformation. However, current model
transformation approaches does not support or at
least not optimized for distributed environments.
Most of the approaches use models stored
completely in the memory. The reason for this is that
processing models directly from hard drives is 3-4
orders of magnitude slower. However, as mentioned
before, some of the domains produce extra-large
models, which do not fit into the memory of one
computer. Partitioning the models and applying
transformation on these partitions is a viable solution.
We are working to make this mid-term goal possible.
By dividing models into partitions, we are not
limited by architectural limits anymore; we can
handle models of arbitrary size (supposing that we
have as many computers as needed in our network).
The emerging world of could computing is a natural
selection. We can easily extend our computational
capacity whenever needed and we do not need to
invest into personal super-computers. Instead, we
only pay for the resources we really use. The most
480
Mezei G., Deák L., Fekete K. and Vajk T..
Graph Partitioning Algorithm for Social Network Model Transformation Frameworks.
DOI: 10.5220/0004475104800487
In Proceedings of the 8th International Joint Conference on Software Technologies (ICSOFT-PT-2013), pages 480-487
ISBN: 978-989-8565-68-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

widespread cloud computing platforms include
Microsoft Windows Azure (Microsoft, 2012),
Amazon AWS (Amazon, 2012) and Google App
Engine (Google, 2012). Although the cloud
computing architecture is a great aid in realizing our
vision on partitioned modeling environment, it does
not solve all the difficulties at once: The efficiency
of using partitioned models is heavily affected by
the communication overhead between the computers
storing the partitions. Therefore, our goal is to
minimize the communication between the computers.
In our approach, models are represented by
graphs. Partitioning the model means partitioning
this graph. We would like to search and transform
the models, thus we need to find graph patterns and
replace them. In order to minimize communication
between computer instances, we have to minimize
the number of navigation steps between the
partitions. Therefore, we need to minimize the
weight of edges that connect nodes in different
partitions. More precisely, we have a mid-term and a
short-term goal. The mid-term goal is to support
minimize inter-partition edges (their weight) for all
kinds of models, while the short-term goal is to be
optimal in case of social network models. First we
have created a general algorithm and then started to
optimize it to social networks. This paper presents
both the original algorithm and its optimization. The
algorithm does not depend on a concrete cloud
computing environment; it can fit each of them.
Note that although the motivation behind the
enhancements is based on the field of social
networks, they improve efficiency in general as well.
The rest of the paper is organized as follows: in
Section 2 the background work is introduced. In
Section 3 the algorithm is presented in detail.
Section 4 evaluates the results of the algorithm and
reveals the advantages of the improved algorithm.
Finally, some conclusions are drawn together with a
brief account of the future directions in Section 5.
2 BACKGROUND
The problem of graph partitioning has been present
for over 40 year. Although the problem is NP-
complete, several fast and heuristic algorithms exist.
B.W. Kernighan and S.Lin have worked out an
efficient heuristic procedure (the KL algorithm) for
partitioning graphs. In their paper (Kernighan and
Lin, 1970) the KL algorithm is discussed in detail.
The basic idea of the work is to count the difference
between the external and internal sum of edge
weight for each ∈ nodes, where is a subset of
nodes. Their work grounds the base for many graph
partitioning algorithms from the automotive industry
to medicine.
To improve the efficiency of the KL algorithm
C.M. Fidducia and R.M. Mattheyses introduce a new
data structure in (Fiduccia, 1982). They used the KL
algorithm to improve Computer Network Partitions.
Bucket list structure has been used to store and
maintain the gain
for each node.
These algorithms are not applicable directly in
our scenario, since the number of partitions is
predefined, and do not map on streaming input
model.
Konrad Voigt has provided a brief conclusion for
each available algorithm for a really similar problem
to the one introduced in this paper. His dissertation
(Voigt, 2011) provides an algorithm for partitioning
planar graphs. In his work, he states that he could
not use the spectral bisection because it does not
support explicitly the variable number of clusters.
George Karypis and Vipin Kumar introduced the
Metis framework (Karypis, 1998). Their paper
divides graph partitioning into three phases:
coarsening, partitioning and uncoarsening. The
phases are explained later in this paper as well. For
each phase, they describe different type of
algorithms that can be used. The Random, HEM,
LEM and HCM algorithms for coarsening; bisection,
KL, GGP, GGGP for partitioning; and KL
refinement, Boundary KL refinement for
uncoarsening. Their work also concludes the
efficiency of these methods.
Burkhard Monien (Monien, 1999) and his team
elaborate the latest type of coarsening algorithms
and their efficiency on different kind of sample
graphs.
Finally, in 2011 Xin Sui, Donald Nguyen, Martin
Burtscher, and Keshav Pingali presented parallel
graph partitioning methods for shared memory –
multicore systems (Sui et al., 2011).
To run model transformation on the model of
social networks we have done basic research in
Social Network Sites (SNS). Several papers
conclude different aspects of Social Networks, from
the definition to methods and applications. The
paper (Boyd, 2006) of Danah M. Boyd and Nicole B.
Ellison conducted a short history, features and future
of social networks. The work of Nathan Eagle, Alex
Pentland and David Lazer (Nathan Eagle, 2009)
introduces the different ways to collect data for
social networks. They use the traditional,
predominant self-reporting and new automatized
mobile phone based data collection. Their article
compares the results and does initial steps to merge
GraphPartitioningAlgorithmforSocialNetworkModelTransformationFrameworks
481

these data. Their paper also conducts different social
networks.
Graph partitioning in general has a huge
mathematical background. However, the area of, the
social networks and cloud environment define
special constraints, like the communication overhead
between computational instances or graph structure
characteristics for social networks. In this paper, we
present an approach applicable in all these areas.
3 MODEL PARTITIONING
Models can easily be transformed into graphs, each
entity in the model is transformed to a vertex in the
graph and each relation in the model, is transformed
into an edge. These graphs may have vertices and
edges reflecting the types and attributes of model
items but at the current stage, we ignore this
information to be able to handle all domains and all
models the same way.
Industrial sized models are difficult to handle
without partitioning them. However, partitioning is
not easy, since models cannot be decomposed into
independent components. The main challenge is to
create partitions with minimal number of edges
between the partitions. We have created a solution to
this issue in the form of a fast, heuristic graph
partitioning algorithm.
As mentioned earlier, we have a short-term goal
(partitioning social network model graphs) and a
mid-term goal (partitioning all kinds of graphs). We
have created a general algorithm and fine tuned it
later for social network-like models. In this paper
firstly we present our original algorithm and then we
elaborate the enhancements applied on it.
Because the extraordinary size of the models, our
algorithms needs to fulfill special constraints:
Existing graph partitioning approaches (e.g. the KL
algorithm) usually suppose that the whole graph is
known, when partitions are created. In our case, this
presupposition is not fulfilled, since the model may
not fit into the memory. We have decided to create
an algorithm that does not build on knowledge of the
whole model, but can handle receiving model parts
(nodes) one by one in a stream. This way, the size of
manageable models is not limited.
Our partitioning method consists of three phases:
1. Growing partitions
2. Separating partition into sub-partitions
3. Refining partitions
The skeleton of the algorithm is the following:
1.NewNode([Node])
2. [partition]= Select partition with
the highest sum of edges weight
from [Node]
3. add [Node] to [partition]
4. if([partition] has too many Nodes)
5. Separate([partition])
6. if([Node] is the last)
7. Coarsen([partitions])
8. for each partition pair
9. KL(partition pair)
10. UnCoarsen([partitions])
Figure 1: Skeleton of the algorithm.
3.1 Growing Partitions
In the first phase (growing partitions), the nodes are
received from the stream and inserted into a partition
(Figure 1– Line 2 and 3).
Selection of the partition to insert the node into is
not random. To determine the chosen partition for a
give node , we compute the sum of weight for
edges from to each partition:
,
∀
(1)
where , is the weight between nodes and .
The chosen partition is the one with the maximum
sum of edge weights max
.
After the insertion, if the number of nodes in
partition is more than a predefined constant value,
we divide the partition into two sub-partitions. As
the result, the partitions cannot grow beyond the
memory of one instance. The details of this
separation are discussed in the second phase.
3.2 Separation
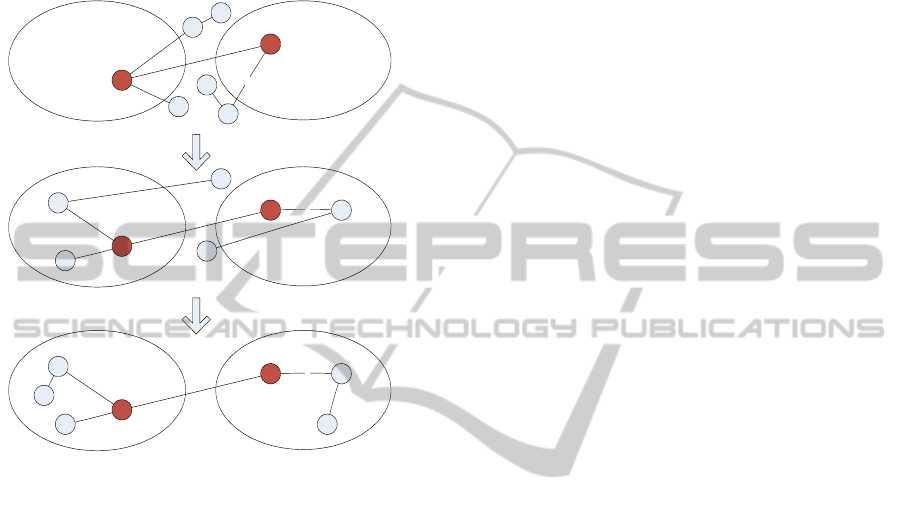
The second phase is called Separation (Figure 2).
Firstly, two nodes are chosen from the partition.
These two nodes considered to be the centers of the
new partitions from now on. The nodes can be
incident nodes; however the Graph Growing
Partitioning (GGP) is sensitive to the choice of the
vertexes from which we start to grow the partitions.
The basic idea here is to select two nodes with the
highest weight of edges. Starting from these points,
we use a modified GGP algorithm (Karypis, 1998).
We begin to grow regions around the two chosen
points in a breath-first fashion until all vertices have
been included (Figure 3).
1.Separate([partition])
2. Choose [node1] and [node2] with the
highest Edge weight
3. Grow regions around [node1] and
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
482
[node2] in breath-first fashion to
create initial [partition1] and
[partition2]
4. KL([partition1],[partition2]);
5. Merge([partition1]);
6. Merge([partition2]);
Figure 2: Separating the nodes into sub-partitions.
Figure 3: The GGP algorithm.
When the regions are full sized (all nodes are
included in one of the partitions), the partitions are
further refined by a modified KL algorithm.
In the KL part of the second phase (Figure 4), the
basic idea is to compute the distance
∀,
∈
∈
∈
∈
(2)
where ,, are nodes,
is the cost of edge
between nodes
,
and
,
are the partitions of
the nodes.
Note that the nodes are not ordered by their D
value in their partitions. However, we select the two
unprocessed nodes with the highest D value to
exchange in both partitions. Ordering the partitions
may seem to be more optimal, but finding the
exchangeable nodes are faster than reordering the
neighbors in each step.
After exchanging, the D value of the unprocessed
incident nodes has to be updated. Notice that the size
of partitions does not change, but the number of
unprocessed nodes continuously decrease. We
define the gain in each iteration:
the sum of the values for nodes and
minus the weight of edge(s) between. We repeat this
step until the value of gain is a positive number.
1.KL([partition1], [partition2])
2. foreach [node] in the partitions
3. compute [D] for [node]
4. do
5. choose unprocessed [node1] and
[node2] from partitions where
[gain]=[node1].[D]+[node2].[D]-
[node1_node2_edge] is highest
6. exchange [node1] and [node2]
7. update [D] values of the
incident nodes of [node1] and
[node2]
8. while([gain]> 0)
Figure 4: Modified KL algorithm.
3.3 Refining Partitions
In the refining partitions phase (Figure 1 – Line 7 –
10), the whole model is already processed, and the
nodes are partitioned. The purpose of the third phase
is to further refine the existing partitions. The phase
consists of three steps: coarsening, refinement,
uncoarsening. In the coarsening step, a series of
simpler graphs with fewer and fewer vertices are
created. Graph coarsening can be done with several
algorithms. Suppose that the graph to be coarsened
is
, in each step of the series we produce a new
from
where
|
|
|
|
.
1.Coarsen( [partitions] )
2. for each [partition]
3. do
4. for random order of each [node]
in [partition]
5. select a connected unmatched
[node1] in [partition] with
the highest edge weight
6. merge [node] and [node1]
7. while the sum of nodes in
[partition] is below [X]
Figure 5: HEM coarsening.
In each iteration, nodes are merged into a multinode.
Multinodes are nodes, which weight is the sum of
the original nodes’ weight and the edges are the
union of the original edges except the edges
connecting the nodes in the multinode. In the case
when both nodes have edges to a vertex v, the
weight of the edge from the multinode to vertex v is
the sum of the original weights of these edges.
An edge-cut of the partition in a coarser graph
will be equal to the edge-cut of the same partition in
the finer graph. A matching of a graph is a set of
Partition2
3
3
3
Partition1
Partition2
Partition1
Partition2
Partition1
GraphPartitioningAlgorithmforSocialNetworkModelTransformationFrameworks
483
edges which does not have any endpoint in common.
The coarser graph is constructed by finding a
matching and merging the nodes into multinodes,
while unmatched vertices remain in the coarsened
graph as well. A matching is maximal if any edge in
the graph that is not in the matching has at least one
of its endpoints matched. A matching can be
maximum when it is a maximal matching and it has
the maximum number of edges. For computational
reasons, in practice, the maximal matching is
preferred instead of the maximum matching.
To find a maximal matching we have used the
Heavy edge matching (HEM) algorithm, which is a
greedy algorithm for the number of coarsening
iterations (Figure 5). It can be shown that the total
edge weight of the graph is reduced by the total
weight of the matching. Although, HEM is based on
a randomized algorithm, thus it does not guarantee
to find the maximum matching, it gives a good
approximation. The vertices are visited in a random
order, and for each vertex u an unmatched vertex v is
chosen, so that edge (u,v) has the highest weight
from the all possible v vertices. The computational
complexity of HEM is
|
|
(Burkhard Monien,
1999).
In the coarsened graph, the KL algorithm is used
to improve the efficiency. Finally, in the
uncoarsening phase, the coarsened graph is projected
back to the original graph. For each vertex, the
coarsened graph contains a subset of vertices. These
vertices are assigned back to the partition of the
original vertices during the projection. During the
projection it is still possible to improve the partitions
by running KL refinement or Boundary KL
refinement algorithms.
Although this heuristic algorithm does not find a
global optimum, it finds a local optimum for graph
partitioning in a really effective way.
Concluding, our algorithm consists of three
major phases. In the first phase, we grow partitions,
in case of large partitions we separated these
partitions into sub-partitions in the second phase.
The second phase is based on the Kernighan-Lin
method. Finally, in the last phase we refine these
partitions using coarsening and uncoarsening
techniques. Now, we present our enhancements on
the algorithm.
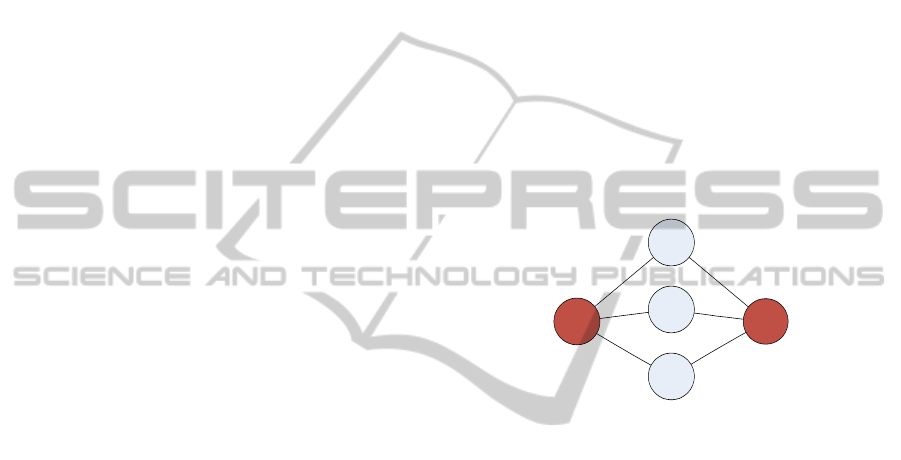
3.4 Order of Nodes in GGP
During separation, our goal is to create two new
partitions having fairly the same amount of nodes.
Two regions are grown in a breath-first fashion
around the two center nodes. A list of nodes is used
to store nodes for processing in waiting_for_process.
When a new node is processed, it is popped from the
list, and the node’s unprocessed incidents are added
to this list if they are not already there. However,
this method has clearly a huge drawback. Let’s take
the following graph on Figure 6. The two center
nodes are a and b. Now if we first process the
incident nodes of node a, none of the nodes will be
added to the partition of b node, because they are
already added to the waiting_for_process list with
a’s partition. The separation is not balanced. Our
solution for this problem is to add the nodes to the
waiting list in an alternating manner, especially for
the incident nodes’ of two center nodes. This means,
that when a and b’s incident nodes are processed,
they are either added to the list with a node’s
partition or b node’s partition alternatingly. This will
result two partitions, one with 3 nodes and one with
2 nodes. The result is fairly balanced.
Figure 6: Problem of separation.
3.5 Merging
Merging is a new phase inserted into the original
algorithm. The phase solves the defragmentation
problem occurred during partitioning. Merging
reduces the number of partitions, which results less
edges between partitions. Merging partitions can
only result less edges between partitions, as new
nodes or edges are not created, and if nodes were
originally in separate partitions which are merged,
edges will no longer running between partitions.
Edges to other partitions remain, but their number
will not increase. Also note that reducing the number
of partitions is not only beneficial because the
number of edges is reduced. The secondary
advantage is caused by the fact that we need fewer
instances in cloud environment, which also results
lower bills. (Supposing that partitions are ran on
different instances.)
The merging phase can take place either after the
whole algorithm, which influences only the final
result, or during the algorithm, after each separation
phase. The second solution influences not only the
final result, but the next step of the algorithm as well.
a b
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
484

Therefore, we have chosen the second option as it
provides a better solution. This way some partitions
can be already corrected at the separation time
which could not be corrected at the end of the
algorithm. Merging is applied for the two new
separated partitions, one after the other. Merging
(Figure 7) itself collects the incident partitions and
chooses a partition where the number of nodes is
still less than the maximum node per partition after
the merging, but would create the largest partition.
After this, it moves the nodes from one partition to
the other partition and deletes the empty partition.
1.Merge( [partition1] )
2. Collect all incident partitions
into [incident]
3. Choose [partition2] where nodes in
[partition1] + [partition2] < max
nodes in partitions, and
[partition2] is the largest
4. Move nodes in [partition2] to
[partition1]
5. Delete [partition2]
Figure 7: Merging phase.
4 EVALUATION
In this section of the paper, the performance results
of our implementation are presented. The algorithm
has been tested on general graphs and on social
network like graphs as well.
A customizable version of the presented
algorithm has been implemented. This version
emulates the behavior of several computer instances,
but runs in local development environment, which
emulates the cloud architecture. Although, the
algorithm can be run in a highly parallel manner, we
have not implemented it in all possible cases yet, as
the algorithm is still being developed and optimized.
We have tried to keep its performance closer to the
real multiple instance scenario, where
communicational overhead is a huge constraint.
To implement the algorithm, we used the C#
language and .NET Framework. There are two
deviations in the implementation from the pseudo
codes shown earlier. One is in the third refining
partitions phase: for all partitions pairs a KL is run
(Figure 1 – Line 9). In our case study
implementation, a few random pairs are chosen for
the KL algorithm, but we do not apply it on all
possible combinations. The other deviation is in the
implementation of KL algorithm: we have an
external loop, thus the algorithm can be repeated
several times sequentially. These repetitions can
further refine the partitions.
The source model and the algorithm are driven
by a set of parameters: (i) Number of nodes; (ii)
Maximum nodes in one partition; (iii) Average
degree of nodes; (iv) Average weight of edges; (v)
The number of KL repetitions.
In the first scenario, we run the algorithm on a
general graph. The model consists of 10000 nodes
and 6 edges for each node in average. The weight for
each edge changes from 1 to 10 in a random manner.
The maximum number of nodes in a partition is
varied from 100 to 1000. The KL repetitions highly
influence the running time of the algorithm. We used
values between 10 and 50.
For reference, a random solution is also
implemented, where the nodes are randomly put into
one of the partitions. If a partition is larger than the
limit, it is separated in a random manner: we create
two new partitions, and we move each node into one
of the new partitions by a random choice. The
random solution is initialized with a single partition.
Note, that comparing our results to a random
solution may seem meaningless, however there is no
other algorithm which would support streaming
input model and variable number of partitions.
Applying the KL algorithm on our models would be
possible if the required extra information is
manually set, but it would lead to false results, since
KL would build on an extra advantage due to the
extra information.
To compare the results, we computed the sum of
the edge weight between the partitions. We have
observed that random solution provides a good result,
in the case of high connectivity and low number of
partitions. Note that in these cases, there is no “near-
optimal” solution.
Our research has shown that the base algorithm
works much better than the random solution under
normal conditions. We have tried several different
random graphs and the advantage of our algorithm
remained approximately the same. Results have
clearly shown, that the algorithm is 50% better than
the random solution in average, based on the sum of
edge weights between partitions.
We have also observed that if the number of
edges is higher, the efficiency of our algorithm is
reduced, while larger edge weight improves it.
However, currently we intend to run model
transformations on the models of social networks
primarily. Modeling the connections between the
people and other social entities realistically is
difficult. It is necessary for us to find a good sample
graph that models social networks. This graph must
be simple, easy to reproduce, but it also should hold
GraphPartitioningAlgorithmforSocialNetworkModelTransformationFrameworks
485
one or more characteristics of social networks.
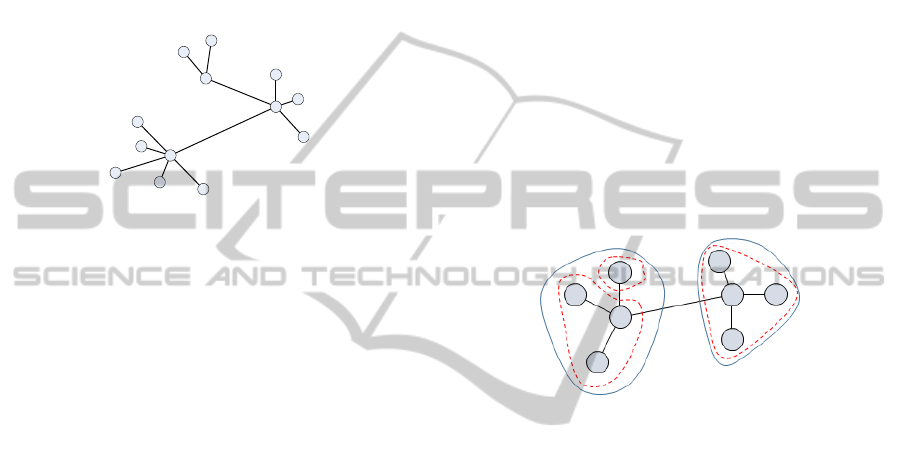
We have prepared several smaller graphs to
simulate the structure of social networks. These
graphs represent different aspects of a social
network in an abstract way. We have identified a
few primitive patterns and built up complex
structures from them. In this paper, we use the
model of a star, and the model of loosely connected
stars for sake of simplicity. We believe the graph of
a connected starts is a good initial approximation for
these topic. Figure 8 represents a linked star graph.
Figure 8: Sample linked star graph.
Our measures have shown that the structure of
partitions and number of partitions are dependent on
the order of the nodes received in the first (growing
partitions) phase. Different ordering results in
different number of partitions and inter-partition
edges. This was the main reason why we added the
merging phase to our algorithm.
The initial problem is the following: let us take a
graph with two stars where the center nodes are
connected. The size of both stars shall not be greater,
but equal to the size of a single partition.
In the first test (Figure 9, solid lines), the nodes
of the first star are received and the second star only
after that (starting with the center). The first partition
is filled by the algorithm and then the center of the
second star is added. Since the partition size is
exceeded, the partition is separated. The centers of
the GGP algorithm will be the center of the first star
as it has the highest degree and the center of the
second star, because its degree is equal to the other
nodes’ degree but it is the last received node. Note
that at this point we have no information about the
final degree of the center of the second star. The
result of the separation phase is two partitions, one
with the center of the first star and the other nodes in
the first star, and one with the center of the second
star. As the algorithm continues, the rest of the
second star is added to the new partition with the
center of the second star. In this case, our algorithm
works well, the result concurs to the expected.
In the second test (Figure 9, dotted lines), node e
of the first star is received only after the second
center was added. The beginning of the algorithm
results the same as in the previous case. However, as
we exceed the limit of a single partition, we choose
different nodes for the centers of the GGP algorithm.
The first center of GGP will be the center of the first
star, because it has the highest degree. The second
center of GGP will be node e as it has the same
degree as the other nodes but it is the last node. The
results of the separation phase are two new partitions:
all nodes except e, and node e. As the algorithm
follows, and we get a new node from the second star,
another separation phase takes place. This is
necessary, since the first partition is oversized, again.
As the result, there will be three partitions, one with
the first star, except node e, one with the second star
and one with node e (Figure 9). Unfortunately, this
is not the result we expect, it contains three
partitions, one with only one node. The number of
edges between the partitions is also higher than in
the previous case. The difference between the two
cases is the order of the nodes.
Figure 9: Different separation results.
Remark, that in the second test, partition of node e
could be merged with the partition of the first star.
Note that the problem is not really specific to linked
stars, or social networks, it is a general issue. The
original algorithm was able to create partitions, but it
was unable to merge partitions. Since we may create
extra partitions (we do not know all the information
(the whole model) during partitioning), we should be
able to merge the partitions later, as our knowledge
evolves. As we see more-and-more from the graph
we can always apply merging again.
We have run tests on the original algorithm and
with merging enabled. Our algorithm has resulted
approximately one order of magnitude less edge
between partitions than the random solution if each
star has the same amount of nodes. The difference is
even more remarkable (45 vs. 2919), if the size of
the star changes. The number of partitions has also
decreased by 25% compared to the merge-less
algorithm. The generation of nodes for the stars does
not influence the final results, all methods has the
same outcome. The number of edges between
partitions scales with the number of nodes overall.
Results are concluded in (Gergely Mezei, 2013).
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
486

5 CONCLUSIONS AND FUTURE
WORK
In model-based software engineering, new methods
have to be applied because the size of the models
can grow beyond the capacity of a common, single
computer. For extra-large models such as social
networks, several instances of computers can be
used and transformations can be applied efficiently
in a distributed fashion. Cloud services provide a
whole new perspective for the multi-instance
infrastructure. Their payment model also allows us
to pay only after the resources we really use. In
order to process models in the cloud, they have to be
partitioned and existing modeling approaches should
be modified. The goal of partitioning is to have the
least amount of edges between different computers,
thus network communication can be reduced.
We have provided an improved heuristic
approach to partition a social network like graphs
into subsets of nodes. The algorithm is based on the
Kernighan-Lin method and graph coarsening. With
this algorithm, a social network like graph can be
partitioned into unconstrained number of partitions,
where the maximum size of partitions is constrained.
In the near future, we aim to further refine the
algorithm by considering further characteristics of
social networks. We need more case studies for this,
thus we plan to use a real world, Facebook-based
case study with real data as the input model with a
small world assumption.
Since structure of social networks tend to change
rapidly, we have to find a way to adopt to these
changes. A promising solution would be to
transforming both models and transformation logic
via model transformations.
We plan to evaluate time performance
measurements for each phase of the algorithm. As
well as, we plan to implement a several magnitudes
bigger scenario, which runs on real network
connected computer instances. In the further future,
we will improve and extend the existing distributed
model transformation methods.
ACKNOWLEDGEMENTS
This work was partially supported by the European
Union and the European Social Fund through project
FuturICT.hu (grant no.: TAMOP-4.2.2.C-
11/1/KONV-2012-0013) organized by VIKING Zrt.
Balatonfüred.
This work has also been supported by the project
“Talent care and cultivation in the scientific
workshops of BME” financed by the grant TÁMOP
- 4.2.2.B-10/1–2010-0009.
REFERENCES
Amazon, 2012. Amazon AWS. [Online] Available at:
http://aws.amazon.com/ (Accessed 10 10 2012).
Burkhard Monien, R. P. R. D., 1999. Quality Matching
and Local Improvement for Multilevel Graph
Partitioning. s.l., s.n.
Danah M. Boyd, N. B. E., 2006. Social Network Sites:
Definition, History, and Scholarship. s.l., s.n.
Facebook, 2012. Facebook. (Online) Available at:
http://www.facebook.com (Accessed 17 10 2012).
Fiduccia, C. M. a. M. R. M., 1982. A linear-time heuristic
for improving network partitions. Piscataway, NJ,
USA, s.n.
Fowler, M., 2010. Domain Specific Languages.
s.l.:Prentice Hall.
Gergely Mezei, L. D. K. F. T. V., 2013. Results of the case
study. (Online) Available at: http://avalon.aut.bme.hu/
~mesztam/vmts/icsoft_results.docx
(Accessed 22 04 2013).
Google, 2012. Google App Engine. [Online] Available at:
https://cloud.google.com/index (Accessed 10 10 2012).
Karypis, G. a. K. V., 1998. A Fast and High Quality
Multilevel Scheme for Partitioning Irregular Graphs.
SIAM J. Sci. Comput., pp. 359-392.
Kernighan, B. W. & Lin, S., 1970. An Efficient Heuristic
Procedure for Partitioning Graphs. The Bell System
Technical Journal, pp. 291-307.
Microsoft, 2012. Windows Azure. (Online) Available at:
https://www.windowsazure.com/en-us/ (Accessed 10
10 2012).
Nathan Eagle, A. (. P. a. D. L., 2009. Inferring friendship
network structure by using mobile phone data. s.l., s.n.
Sui, X., Nguyen, D., Burtscher, M. & Pingali, K., 2011.
Parallel graph partitioning on multicore architectures.
Houston, TX, Springer-Verlag, pp. 246-260.
Voigt, K., 2011. A Fast and High Quality Multilevel
Scheme for Partitioning Irregular Graphs. Dresden,
Germany: Technische Universität Dresden.
GraphPartitioningAlgorithmforSocialNetworkModelTransformationFrameworks
487
