
Human Motion Recognition from 3D Pose Information
Trisarea: A New Pose-based Feature
M. Vinagre
1
, J. Aranda
1,2
and A. Casals
1,2
1
Robotics Group, Institute for Bioengineering of Catalonia, Baldiri Reixac 10-12, 08028 Barcelona, Spain
2
Universitat Politcnia de Catalunya, BarcelonaTech, Jordi Girona 1-3, 08034 Barcelona, Spain
Keywords:
Pose-Based Features, Human Motion Recognition, Human System Interface.
Abstract:
The use of pose-based features has demonstrated to be a promising approach for human motion recognition.
Encouraged by the results achieved, a new relational pose-based feature, Trisarea, based on geometric
relationship between human joints, is proposed and analysed. This feature is defined as the area of the triangle
formed by connecting three joints. The paper shows how the variation of a selected set of Trisarea features
over time constitutes a descriptor of human motion. It also demonstrates how this motion descriptor based
on Trisarea features can provide useful information in terms of human motion for its application to action
recognition tasks.
1 INTRODUCTION
In recent years, the study of computational methods
that allow identifying and understanding human
motion has been a field of interest in research and
industry. The interest in this topic is motivated
by its potential application in a large variety of
systems, such as surveillance, patient monitoring,
robotics, games, intelligent user interfaces, and in
general, those activities that involve some kind of
interaction between users and systems. This research
is commonly known as gesture, action or activity
recognition, and several surveys have been published
related to this topic in the last years. In (Poppe,
2010) a detailed overview of current advances in
the field is provided. The work in (Aggarwal
and Ryoo, 2011) presents recognition methodologies
developed for simple human actions, as well as,
for more complex high-level activities. The study
presents an approach-based taxonomy that compares
the advantages and limitations of each approach.
Despite the efforts of a large number of
researchers, motion recognition still remains an
unsolved problem due to the variability of input
data in intra-classes and similarity in inter-classes.
In the real world a given motion can be performed
by subjects anthropomorphically different and, a
given subject can perform a determined motion with
different absolute parameters of velocity or trajectory,
affecting its appearance.In general, human motion
recognition approaches exploit appearance and/or
human body parts information by defining suitable
features of an image sequence. From appearance
features, some methods recognize motions as a
sequence of local low-level features in images
(Gorelick et al., 2007; Matikainen et al., 2010).
Other methods use body parts information, as human
pose estimation, to extract posture and body motion
features (Ellis et al., 2013; Gu et al., 2010). A
recent work (Yao et al., 2011) discusses about
both approximations for action/motion recognition
in home-monitoring scenarios, depicting that
pose-based features outperform low-level appearance
features, even when data are heavily corrupted by
noise. The study also suggests that a combined
approach of both techniques can be beneficial for
motion recognition.
Different pose-based features extracted from
positions of human joints have been used, which can
be mainly classified into two methodologies. The first
relies on obtaining features from joint parameters as
orientation, position, velocity or acceleration. Many
previous works use this kind of features to represent
human’ poses and motion (Gu et al., 2010; Xia
et al., 2012). However, the problem of extracting
a reliable similarity measure between the same type
of motions or poses from individual properties of
joints is still unresolved. In the second methodology
this problem is reduced obtaining features from
correspondences between joints, so called relational
74
Vinagre M., Aranda J. and Casals A..
Human Motion Recognition from 3D Pose Information - Trisarea: A New Pose-based Feature.
DOI: 10.5220/0004482800740082
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 74-82
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

pose-based features. Usually, they are geometric
correspondences between joints, called relational
geometric features, as the Euclidean distance between
two joints or the distance between a joint to a plane
spanned by other joints. (Yun et al., 2012).
The good prospects of relational geometric
features as motion and pose representation (Chen
et al., 2009) and the short number of such featured
proposed up to now, has motivated this work. Thus,
this research attempts to contribute with a new
relational geometric feature and its use for motion
recognition. We propose a relational geometric
feature called Trisarea, which describes the geometric
correspondence between joints by means of the area
of the triangle that they define. We demonstrate
how the variation of the Trisarea feature in a motion
sequence retains useful information for its application
in human motion recognition.
The rest of the paper is organized as follows.
Section II gives a short review of the recent advances
in pose-based features for their use in motion
recognition. Section III presents this new pose-based
feature called Trisarea. A motion representation
as Trisarea evolution and a motion descriptor based
on Trisarea features variation over time is presented
in section IV. In section V, the performance of a
motion recognition integrating our motion descriptor
is presented. Experimental results are given in section
VI and conclusion and future extensions in section
VII.
2 RELATED WORK
Human motion recognition from pose-based features
requires an inherent procedure for extracting human
pose. Vision-based pose estimation faces the difficult
problem of estimating kinematic parameters of a body
model, either from static frame or a frame sequence.
However, despite this complex initial processing,
this approach has several advantages over motion
recognition from appearance based features since it
is invariant to the point of view and to appearance
variations produced by environment conditions. It is
also less sensitive to noise from intra-class variances
in contrast to recognition from appearance based
features.
Previous promising methods for interactive
human pose estimation and tracking are those that
use a volumetric model of the body as (Luo et al.,
2010; Matthias Straka and Bischof, 2011) or utilize
depth information extracted from structured light
sensors, as the newly Microsoft Kinect camera or the
Asus Wavi Xtion as (Shotton et al., 2011; Schwarz
et al., 2010).
Motivated by the current progress in real-time
pose estimation, some recent works in human motion
recognition have been performed based on such
information. The work in (Raptis et al., 2011)
presents a real-time dance gestures classification
system from pose representation. It uses a
cascaded correlation-based classifier for multivariate
time-series data and distance metric based on
dynamic time-warping. This approach has an average
accuracy of 96.9% for approximately 4 second
motion recordings. In (Miranda et al., 2012) a
method is introduced for real-time gesture recognition
from a noisy skeleton stream extracted from Kinect
depth sensors. They identify key poses through
a multi-class classifier derived from support vector
learning machines and gestures are labelled on-the-fly
from key pose sequences through a decision forest
tree.
These and other works as (Gu et al., 2010;
Uddin et al., 2011; Xia et al., 2012; Sung
et al., 2012) recognize human motion from direct
measures of joint parameters of the human body as
angles, instantaneous position, orientation, velocity,
acceleration, etc. Such approaches have as
inconvenient that different repetitions of a same
action must be numerically similar, and, due to the
irregularity in the periodicity of human actions and
intra-person motion variability this assumption is not
always true.
Other methods are more flexible which they
use relational geometric features describing
correspondences between joints in a single pose
or a short sequence of poses. In (M¨uller et al., 2009)
different relational geometric features are introduced,
which have been used for single human action
recognition (Yao et al., 2011; Wang et al., 2012) and
for two-people interaction activities detection (Yun
et al., 2012), with good results. In (Chen et al., 2009)
different of these type of features are proposed, as:
• Distance feature. It is defined as the Euclidean
distance between all pairs of joints of a human
pose, at time t.
• Rotation feature. It is the rotational angle of the
line spanned by two joints with respect to the
reference pose.
• Plane feature.It computes the correspondence
between the plane spanned by some joints with
respect to a single joint, as the distance from this
joint to the referred plane.
• Normal plane feature. Similar to plane feature,
but here the plane is defined by its normal spanned
by two joints and a joint belonging to the plane.
HumanMotionRecognitionfrom3DPoseInformation-Trisarea:ANewPose-basedFeature
75
• Angle feature. It is the angle between two lines
spanned by two pairs of different joints.
3 TRISAREA FEATURE
In our work, the human body or pose is interpreted
as a connected graph which nodes are the joints
themselves and edges represent body parts. Given
a pose from the above representation, a feature
extraction is performed in order to extract some joint
correspondences that characterize this pose. In this
way, a new feature called Trisarea is applied. Trisarea
represents a geometric relation between joints given
by the area of the triangle they define.
Mathematically, let p
1
, p
2
, p
3
be the coordinates
of joints j
1
, j
2
, j
3
in a Euclidean space R
3
. Given a
pose P, the Trisarea feature between j
1
, j
2
, j
3
joints is
defined by:
△ ( j
1
, j
2
, j
3
,P) =
1
2
· k
−−→
p
1
p
2
×
−−→
p
1
p
3
k (1)
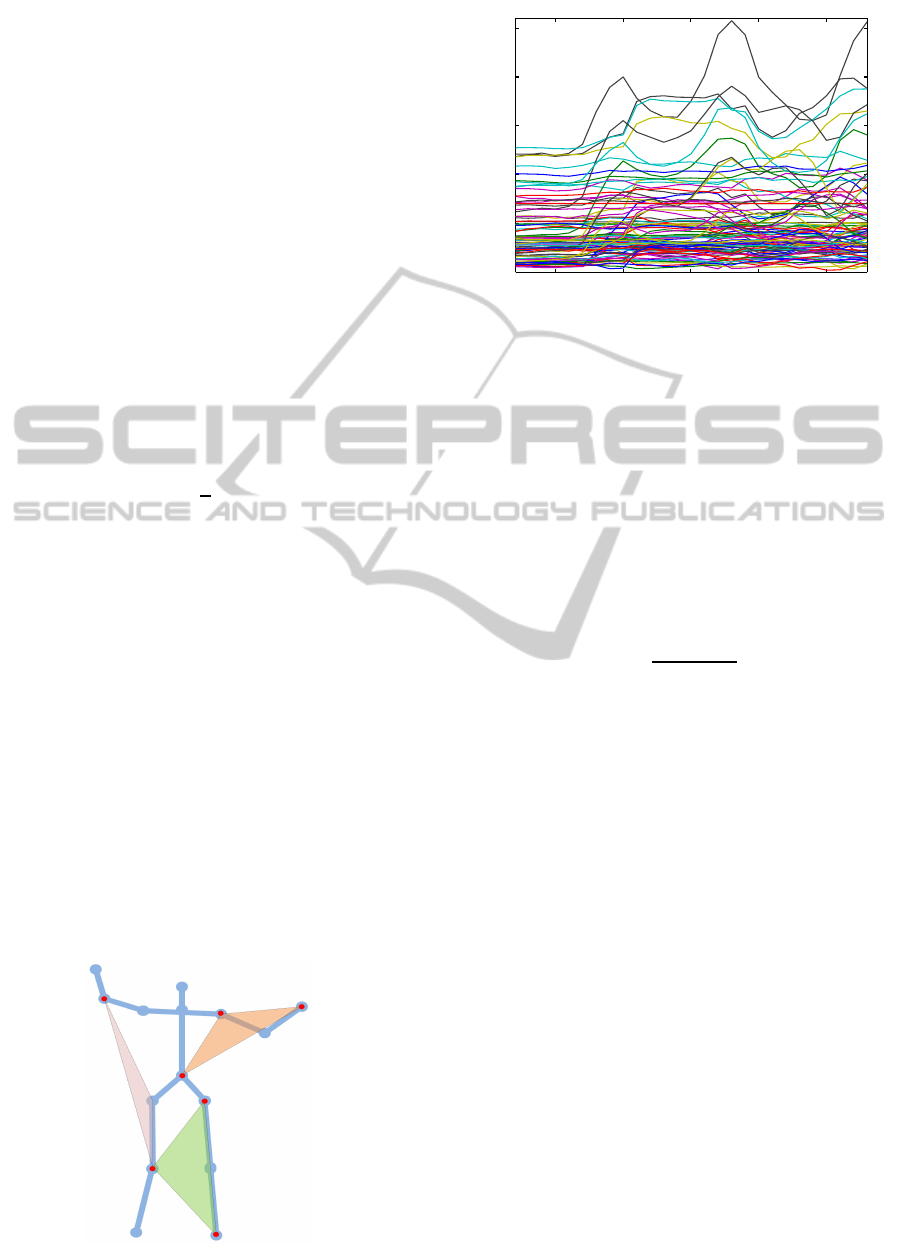
Figure 1 Shows an example of Triarea features in a
given pose where there are three geometric relations
between eight joints.
4 MOTION DESCRIPTOR
In the previous section, Trisarea has been presented
as a feature for an individual pose description. In this
section, a descriptor of human motion is built from the
evolution of different Trisarea features over time. The
existence of irrelevant Trisarea features was realized
by observation, thus, an automatic method to filter
and select the most important components is shown.
A single vector representation of these selected
features evolution over time and its application as a
motion descriptor are presented.
Figure 1: Example of Trisarea features.
5 10 15 20 25
0
0.1
0.2
0.3
0.4
0.5
Time (sec.)
Area (m2)
Figure 2: Representation of a ’arm wave’ motion with the
evolution of Trisarea features.
4.1 Motion Representation as Trisarea
Evolution
In order to represent the motion of human body, the
evolution of Trisarea features from the pose sequence
of motion is calculated. The number of Trisarea
features in a motion representation depends on the
number of joints in the pose representation. Being
J the number of joints of a pose representation, the
number of Trisarea features F is:
|F| =
J!
J · (J − 3)!
(2)
Thus, given a motion m with a sequence of poses
P
SEQ
the motion representation Mrep(m) is a matrix
of F × kP
SEQ
k defined as:
Mrep(m) =
△
1
( j
i
, j
j
, j
k
, p
0
) ·· · △
F
( j
r
, j
p
, j
q
, p
0
)
.
.
.
.
.
.
.
.
.
△
1
( j
i
, j
j
, j
k
, p
C
) ··· △
F
( j
r
, j
p
, j
q
, p
C
)
(3)
Figure 2 shows the motion representation of a arm
wave motion. In this example, the pose representation
contains J = 15 joints as shown in figure 1. So, the
number of Trisarea features by applying the equation
2 is |F| = 455.
In this motion representation, Trisarea features
contribute to encode useful information about motion.
However, many of these features are irrelevant
and can be obviated without loss of discrimination
performance.
The selection of relevant features is not
immediately intuitive, but few of them are clearly
irrelevant, as those define invariant areas, formed by
mutually constrained joints (i.e. torso, right shoulder,
left shoulder).
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
76

We perform an unsupervised feature selection
procedure in order to filter irrelevant Trisarea
features; those that do not contribute to recognize
certain motion from a motion set. This process is
described below.
4.2 Dimensionality Reduction
The selection process is a common preprocessing
filter step used for classification and pattern
recognition applications. In this process, we want to
determine relevant triangles to reduce computational
cost and avoid undesired noise.
Hence, we have used a computationally feasible
unsupervised component selection methodology
called principal feature analysis (PFA) (Lu et al.,
2007) to find the salient components of the initial
feature vector. This method exploits the information
that can be inferred from the principal component
coefficients to obtain the optimal subset of joints
relationships.
This feature selection methodology differs from
common feature extraction methods as principal
component analysis (PCA), independent component
analysis (ICA) and Fisher Linear Discriminate
Analysis (LDA). These methods apply a mapping
from the original feature space to a lower dimensional
feature space, having as disadvantage that all
components of the original feature are needed in the
projection to the lower dimensional space, so they
must be always calculated. Instead, in PFA only a
subset of relevant components in the original feature
is selected, thus lessening computation time. In this
case there is no mapping process and it is possible
to work directly in a reduced feature space. Detailed
information of this method can be read in (Lu et al.,
2007).
PFA method is applied on a large set of Trisarea
5 10 15 20 25
0
0.05
0.1
0.15
0.2
0.25
Time (sec.)
Area (m2)
Figure 3: Filtered motion representation of ’arm wave’
example.
1 2 3 4 5 6 7 8 9 10 11 12 13 14
0
0.2
0.4
0.6
0.8
1
Trisarea features
Normalized Variation
Figure 4: Motion Descriptor of a ’arm wave’ example.
features extracted from randomized poses of all the
available sampled motions to be recognized. Here,
the variation to be retain is set in order to retain most
important features. As a result, we obtain a reduced
motion representation Mrep
filt
with a set of Trisarea
features F
filt
which the number of features is less than
the original motion representation(|F| >> |F
filt
|).
As an example, figure 3 shows the remaining
features (C
filt
= 14) as a result of the PFA process
that retains the 95% of data input from the original
set of features(C = 455) of the arm wave motion
representation shown in figure 2.
4.3 Trisarea Variation as Motion
Descriptor
The analysis of temporal trends in the variation of
Trisarea features is useful for motion description.
Our motion description uses a descriptive statistic
parameter called Pearson’s variation coefficient. This
statistic parameter allows us to perform a temporal
description and summarization of a univariate time
series δ
i
of Trisarea feature △
i
over time T, calculated
as:
D
var
(δ
i
) =
σ(δ
i
)
µ(δ
i
)
(4)
where σ(·) and µ(·) perform the standard deviation
and the mean of a univariate time series over
time. Finally, the equation 4 is applied to every
univariate time series on the set of filtered Trisarea
features(F
filt
). As a result, a single vector with a
dimension 1× |F
filt
| is calculated:
ϕ = hD
var
(δ
1
),· · · , D
var
(δ
|F
filt
|
)i (5)
As an example, figure 4 shows the instance of the
motion ’wave arm’ example shown in section 4.2.
This motion is instantiated with the 14 Trisarea
features selected by the FPA pre-process.
HumanMotionRecognitionfrom3DPoseInformation-Trisarea:ANewPose-basedFeature
77
5 Human Motion Recognition
The core of a motion recognition process is
exploring input data in order to identify it. In
this work, the meaningful features about motion are
represented in the motion descriptor explained in
section 4.3. Since the motion descriptor is defined as a
feature vector, classification methods using Machine
Learning techniques can be used. The performance
of the majority of these techniques depends on the
feature space and the quality of data used in learning.
In fact, our motion representation is not useful with
techniques which deal with the temporal order of data
patterns because this data has been reduced.
In order to evaluate the contribution of Trisarea
features as a feature space in a recognition process,
two classification techniques were performed. The
first classification technique was a Nearest Centroid
classifier. This classification is a supervised
neighbors-based learning method that obtains a
prototype class by the centroid of its training
instances. Let T
ζ
set
be the set of training instances of a
certain class ζ used in the learning phase, the motion
prototype or centroid of a class is calculated as:
Prot
ζ
= Mean(T
ζ
set
) (6)
In order to determine the class of an unknown
input motion, the minimal similarity against all
motion prototypes using an Euclidean distance
measurement is calculated. Let ϕ an unknown motion
instance, which must be classified, and let K be the set
of motion types (classes). The resulting motion class
ζ of ϕ is given by:
ζ = argmin
ζ
(kϕ− Prot
ζ
k)
∀ζ∈K
(7)
The second classification method used was the
Naive Bayes classifier. This classification is
a supervised learning method based on applying
Bayes’ theorem with the assumption of independence
between every pair of Trisarea features. It requires a
small amount of training data to estimate necessary
parameters. In order to classify an unknown motion
instance ϕ from K types of motion, the maximum
a posteriori (MAP) decision rule is applied. The
estimation of the motion class ζ of ϕ is calculated as:
ζ = argmax
ζ
(P(ζ|ϕ)
∀ζ∈K
(8)
In this work, the likelihood function of the features
given for each class was modelled as Gaussian
mixtures.
6 EXPERIMENTATION
In this section, a test of the motion recognition
approaches explained in section 5 is presented. For
this test, a public dataset is used in order to compare
the obtained results with other recognition methods
in the literature. Finally, the obtained results are
discussed.
6.1 Experimentation Setup
Dataset. We selected a public MSR Action 3D
dataset (Li et al., 2010) which supplies the sequences
of depth maps captured by a depth camera similar
to a Kinect device, with a frame rate of 15 fps
and down-sampled resolution of 320x240. This
dataset contains 20 differentactions that covervarious
movement of arms, legs, torso and their combinations
without human-object interactions: high arm wave,
horizontal arm wave, hammer, hand catch, forward
punch, high throw, draw x, draw tick, draw circle,
hand clap, two hands wave, side -boxing, bend,
forward kick, side kick, jogging, tennis swing, tennis
serve, golf swing and pick up & throw. Each action
was performed by 9-10 subjects two or three times.
The subjects were advised to use their right arm or
leg whenever an action is to be performed by a single
limb. Altogether, 567 actions sequences in total were
used, those provided by the dataset.
Pose model. The pose estimation was extracted
from the original depth maps. After that, pose
estimation results were inspected manually to filter
possible pose estimation errors.
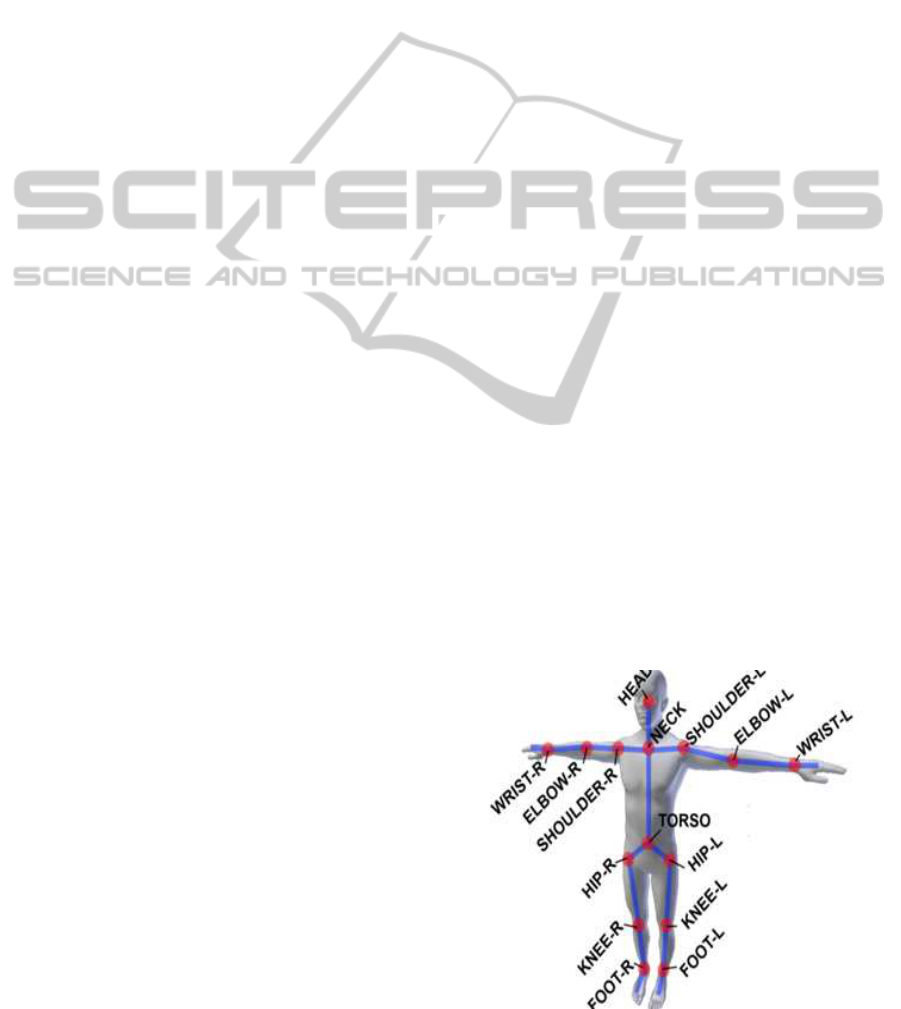
Our human pose model was a pose representation
of 15 joints, as shownin figure 5. As some approaches
explained in section 2, we normalized the position of
joints relative to the torso position to make the pose
Figure 5: Pose model.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
78
description independent to pose changes with respect
to the world space and camera changes(e.g. point
of view changes) and tolerant to anthropomorphic
differences.
6.2 Results
In order to contrast our analysis, the dataset actions
were divided into three subsets, suggested in (Li et al.,
2010). This division has been followed in different
works in order to obtain a public benchmarking.
Concretely, every of subsets contain 8 actions, as
shown in table 1. The action sets AS1 and AS2 were
intended to group actions with similar movements,
while the action set AS3 was intended to group
complex actions together.
Table 1: Data subsets from MSR Action 3D dataset.
Subset Subset Subset
AS1 AS2 AS3
Horiz. arm wave High arm wave High throw
Hammer Hand catch Forward kick
Forward punch Draw x Side kick
High throw Draw tick Jogging
Hand Clap Draw circle Tennis swing
Bend Two hand wave Tennis serve
Tennis serve Forward kick Golf swing
Pickup&throw Side boxing Pickup&throw
For each experiment/subset, motions were
represented as the Trisarea evolution representation
explained in section 4.1. After that, the filtering step
called Feature Principal analysis(FPA) and explained
in section 4.2 was applied. For the FPA, a random set
of poses from available motions to be recognized was
calculated.Concretely, this set was built with a set of
1500 randomized poses spread evenly from actions.
In the FPA process, the number of features to be
filtered was calculated taking into account the ratio
of the amount of original input information to be
0 10 20 30 40
0
20
40
60
80
100
Number of Trisarea features
Variation Retained (%)
AS3
AS2
AS1
Figure 6: Input data variation retained against Trisarea
feature dimensionality.
retained (variation retained ratio). The behaviour
of the original input information retained against the
number of filtered features is shown in figure 6. The
inflection points of each experiment were around
90%. So, we chose 90% as variation reatined ratio
to preserve a good information-feature ratio. The
dimensionality of the motion descriptors was 18, 16
and 21 for AS1, AS2 and AS3 respectively.
With the results of the filtering step, the remaining
Trisarea features were used to deal motion data
into a feature space. The data transformation was
performed with applying equation 5 over data of
subsets. The new data representation of actions
in a single feature vector allow us to perform a
motion/action recognition process based on the two
classification methods introduced in section 5. Since
these classification methods have a training step in a
supervised learning way, 3/4 parts of action instances
were selected as training data. The rest of data were
used for the classification test.
The accuracy of both classification approaches for
each experiment/subset are shown in table 2.
Table 2: Results of the classification performance.
AS1 AS2 AS3
Nearest
75.4% 73.5% 79.6%
Centroid
Naive
88.6% 86.3% 94.0%
Bayes
We can observe a better accuracy of the Nave
Bayes (NB) classifier than the Nearest Centroid (NC)
technique. One of the reason is that the NC classifier
performed was a non-generative model and it does
not take into account the variability of the distances
to the centroid within a class. Nevertheless, the
Naive Bayes classifier is a generative model where
classes are modelled by probability distributions
which are generated by training data. This
probabilistic framework accommodates asymmetric
misclassification and class priors.
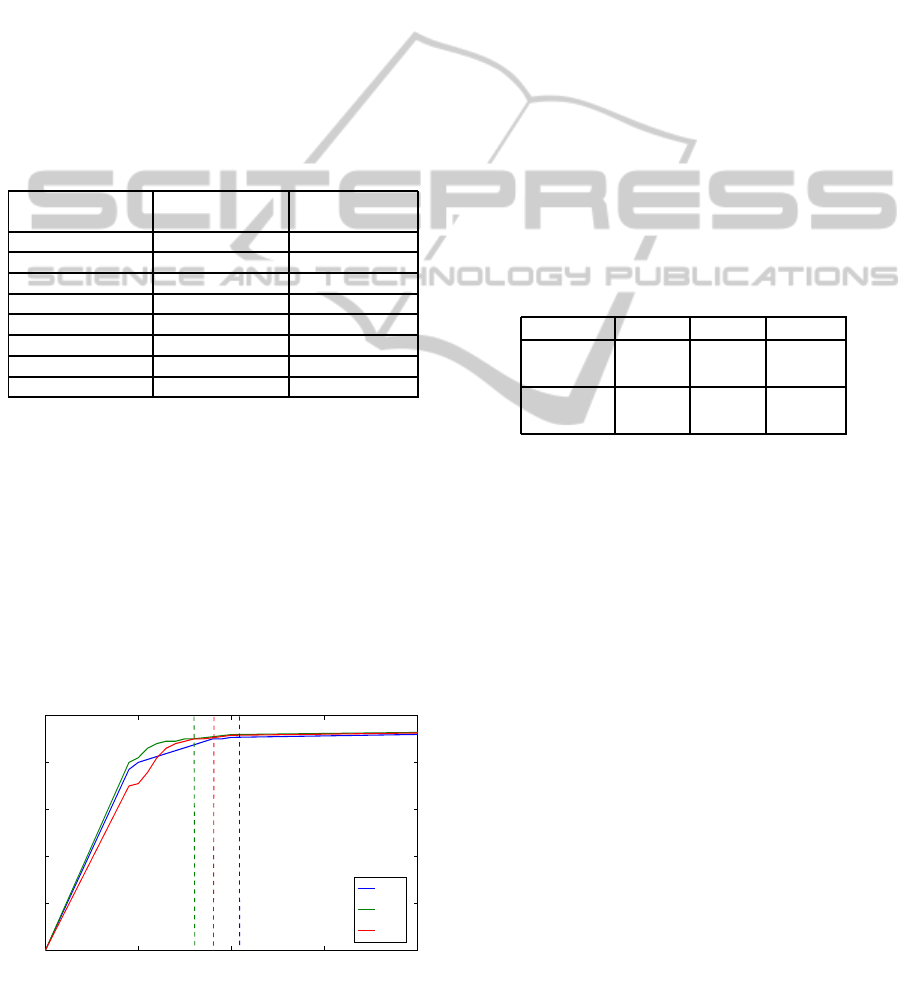
In order to analyze the NC classifier performance,
similarity between test samples and learned motion
prototypes has been calculated. Figure 7 shows
the normalized mean distance between test samples
belonging to the same class against the motion
prototypes. Low values was expected along the
diagonal indicating high similarity of the samples
with the prototype of their class. Higher out
of diagonal values indicate low similarity to other
prototypes so lower probability of misclassification.
The dispersion of the test samples of the same
class were not significant (with stdev around 0.2).
This fact depicts good results of the Trisarea feature
space representation of motion data. Figure 7 shows
HumanMotionRecognitionfrom3DPoseInformation-Trisarea:ANewPose-basedFeature
79
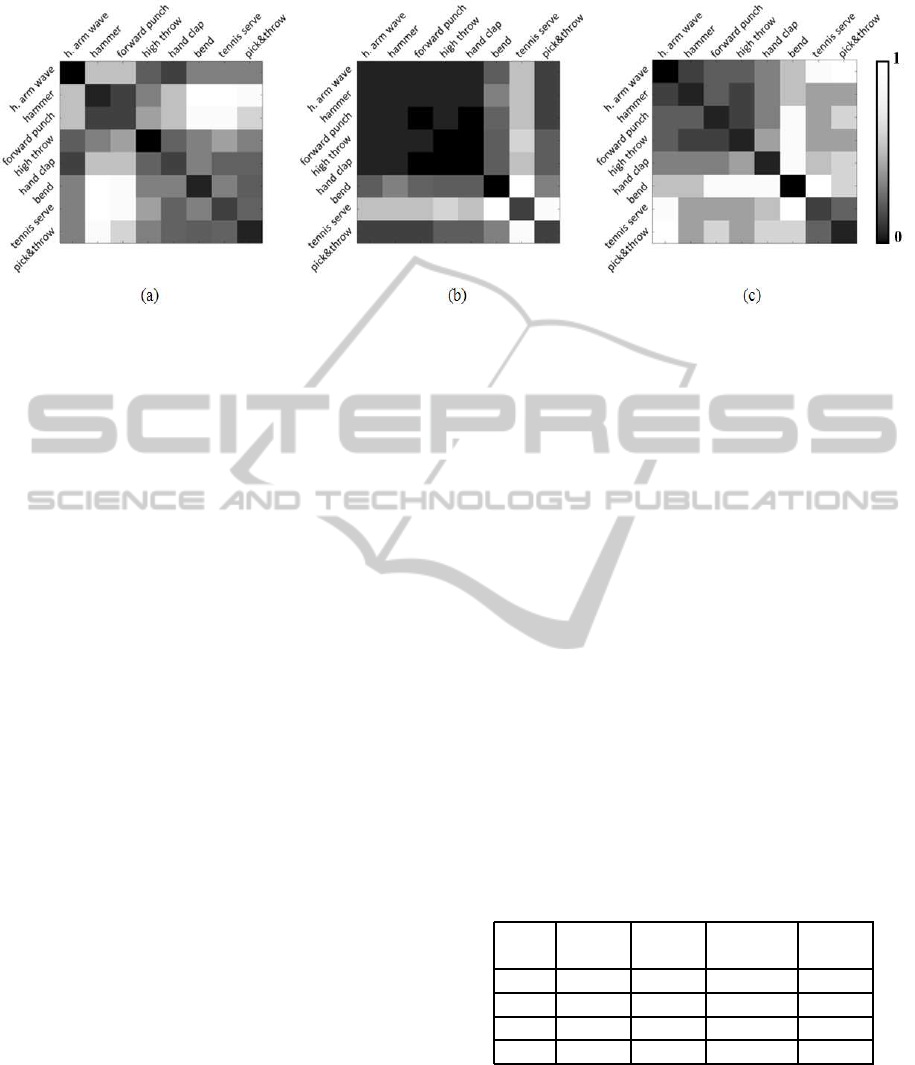
Figure 7: Normalized sum of distances between all tested instances belonging to a class against the class prototypes in (a)
AS1, (b) AS2 and (c) AS3 action sets.
that some actions like high arm wave and hammer,
similar motions present similar distance between their
test samples and their prototypes. Indeed, in figure
7.b we can observe that half of the motions are very
similar and it remarks the poor classification accuracy
in AS2. These results show that NC classifier
decreases its accuracy when similar motions exist.
In the case of high amount of training data and
non-similar real movements, the NC classifier with
our motion instances can be applied. This approach
constitutes a fast recognition task with moderate
recognition accuracy. For better accuracy results, the
nave Bayes classifier can be applied. The result of
NB classifier provides an average of 89.6% while NC
classifier reaches an average of 76
In general, both classifiers results are good and
they depict that our Trisarea feature seems to be useful
feature for human motion recognition. Relevant
features retain sufficient information to describe and
discriminate different human motions.
Since NB shows a better performance than NC
classifier, NB classifier was selected as our motion
recognition method and a specific comparison against
others approaches in the literature is presented in the
next section.
6.3 Comparison
We compared our approach with three different state
of the art methods (Li et al., 2010; Vieira et al.,
2012; Miranda et al., 2012). These approaches
uses different recognition strategies and they use the
same dataset as benchmark. So, we can perform a
testbed in order to compare and evaluate our motion
recognition performance. In (Li et al., 2010) a
method to recognize human actions from sequences
of depth maps is presented. They obtain a projection
of representative sampled 3D points to characterize
a set of salient postures which are used as nodes to
describe an action graph. In (Vieira et al., 2012) depth
maps images are used too. They present Space-Time
Occupancy Patterns (STOP) which depth information
sequence is represented in a 4D space-time grid and
an action graph based system is used to learn a
statistical model for each action class. On the other
hand, (Miranda et al., 2012) presents a real-time
action gesture recognition from a pose stream with
an angular representation. They capture key poses
through a multi-class classifier and a gesture/motion
is labelled from a key pose sequence through a
decision forest algorithm
For the testbed comparison, the partition of dataset
were performed in the same way that the others
approaches.This partition consisted in performing
a training set with half of the samples and the
rest of samples for the test part. Accuracies of
our approach and others with datasets AS1, AS2
and AS3 are shown in Table 3. In general, the
Table 3: Comparison of recognition accuracies (%).
Li Vieira Miranda
Our
et al. et al. et al.
AS1 72.9% 84.7% 93.5% 76.2%
AS2 71.9% 81.3% 52.0% 72.3%
AS3 79.2% 88.4% 95.4% 81.0%
Avg. 74.7% 84.8% 80.3% 76.5%
results in table 3 depict how the dynamics of the
Trisarea feature is able to give useful information in
terms of human motion recognition. The results of
the dimensionality reduction of motion descriptors
show a reduction from 455 possible Trisarea features
to a maximum of 21, retaining around 90% of
the original input information. This fact confirms
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
80

that only few Trisarea features are relevant to
recognition processes. Statistics on relevant features
was performed and this analysis shows that relevant
triangles are, in most cases, formed by a swing of
non-adjacent joints with unconstrained movements in
3D space (i.e. elbows, knees or wrist) with respect
to a joint with a constrained position from torso
reference (i.e. shoulder, hip or neck).
The comparison with other recognition
approaches denotes that our approach performs
reasonably well. For this testbed, our results
outperform (Li et al., 2010) approach. On the other
hand, (Vieira et al., 2012; Miranda et al., 2012) have
better results because they have a more accurate
temporal information about motion. However, our
approach have the most compact representation and
surely is faster than previous pose-based methods as
(Miranda et al., 2012).
As conclusion, the results show the usefulness
of Trisarea features extraction to perform a motion
feature space that permits us the use of classical
and powerful Machine Learning methods to perform
human motion recognition. Although we have
obtained promising results with the Pearsons
coefficient of variation, this measure is ambiguous
for similar movements and we have to explore other
options to encode the dynamic behavior of Trisarea
features in motion sequences.
7 CONCLUSIONS
A new relative pose feature called Trisarea has been
presented and its use for human motion recognition
has been proposed. Specifically, a motion descriptor
based on the evolution of Trisarea features has
been performed. A Principal Feature Analysis has
provided good results selecting the most relevant
Trisarea features with the objective of reducing the
dimension of the obtained feature vector for posterior
recognition steps.
With the filtered motion descriptors, a single
instance of a motion has been proposed applying
Pearsons relative coefficient of variation for each
Trisarea feature over time. These motion instances
have been generated over three different datasets in
order to verify recognition results.
As a result, the experiments have demonstrated
the usefulness of Trisarea features for human
motion recognition tasks. A comparison with other
approaches in the same scenario has revealed that
our recognition results have not been far from other
methodologies results. In addition, the presented
approach has got a good accuracy/speed ratio because
it has less preprocessing calculations than the
compared pose-based approaches.
Motivated with the presented results, in a future
scope we will explore some kind of temporal
modelling in order to deal with changes of order of
motion execution and will test them on-line in real
world scenarios.
ACKNOWLEDGEMENTS
This work has been done under project IPRES,
DPI2011-29660-C04-01 of the Spanish National
Research Program, with partial FEDER funds.
REFERENCES
Aggarwal, J. and Ryoo, M. (2011). Human activity
analysis: A review. ACM Computing Survey,
43(3):16:1–16:43.
Chen, C., Zhuang, Y., Xiao, J., and Liang, Z. (2009).
Perceptual 3D pose distance estimation by boosting
relational geometric features. Computer Animation
and Virtual Worlds, 20(2-3):267277.
Ellis, C., Masood, S. Z., Tappen, M. F., Laviola, Jr., J. J.,
and Sukthankar, R. (2013). Exploring the trade-off
between accuracy and observational latency in action
recognition. International Journal of Computer
Vision, 101(3):420–436.
Gorelick, L., Blank, M., Shechtman, E., Irani, M.,
and Basri, R. (2007). Actions as space-time
shapes. Transactions on Pattern Analysis and
Machine Intelligence, 29(12):2247–2253.
Gu, J., Ding, X., Wang, S., and Wu, Y. (2010). Action
and gait recognition from recovered 3-d human joints.
Trans. Sys. Man Cyber. Part B, 40(4):1021–1033.
Li, W., Zhang, Z., and Liu, Z. (2010). Action recognition
based on a bag of 3d points. In Computer Vision
and Pattern Recognition Workshops (CVPRW), 2010
IEEE Computer Society Conference on, pages 9–14,
Washington, DC, USA. IEEE Computer Society.
Lu, Y., Cohen, I., Zhou, X. S., and Tian, Q. (2007).
Feature selection using principal feature analysis. In
Proceedings of the 15th international conference on
Multimedia, pages 301–304, New York, NY, USA.
ACM.
Luo, X., Berendsen, B., Tan, R. T., and Veltkamp, R. C.
(2010). Human pose estimation for multiple persons
based on volume reconstruction. In Proceedings of
the 2010 20th International Conference on Pattern
Recognition, pages 3591–3594, Washington, DC,
USA. IEEE Computer Society.
Matikainen, P., Hebert, M., and Sukthankar, R. (2010).
Representing pairwise spatial and temporal relations
for action recognition. In Proceedings of the 11th
European conference on Computer vision: Part I,
pages 508–521, Berlin, Heidelberg. Springer-Verlag.
HumanMotionRecognitionfrom3DPoseInformation-Trisarea:ANewPose-basedFeature
81

Matthias Straka, Stefan Hauswiesner, M. R. and Bischof, H.
(2011). Skeletal graph based human pose estimation
in real-time. In Proceedings of the British Machine
Vision Conference, pages 69.1–69.12, Aberystwyth,
Wales. BMVA Press.
Miranda, L., Vieira, T., Morera, D. M., Lewiner, T., Vieira,
A. W., and Campos, M. F. M. (2012). Real-time
gesture recognition from depth data through key poses
learning and decision forests. In SIBGRAPI, pages
268–275, Washington, DC, USA. IEEE Computer
Society.
M¨uller, M., Baak, A., and Seidel, H.-P. (2009).
Efficient and robust annotation of motion
capture data. In Proceedings of the 2009 ACM
SIGGRAPH/Eurographics Symposium on Computer
Animation, pages 17–26, New York, NY, USA. ACM.
Poppe, R. (2010). A survey on vision-based human action
recognition. Image and Vision Computing, 28(6):976
– 990.
Raptis, M., Kirovski, D., and Hoppe, H. (2011).
Real-time classification of dance gestures from
skeleton animation. In Proceedings of the 2011 ACM
SIGGRAPH/Eurographics Symposium on Computer
Animation, pages 147–156, New York, NY, USA.
ACM.
Schwarz, L., Mateus, D., Castaneda, V., and Navab, N.
(2010). Manifold learning for tof-based human body
tracking and activity recognition. In Proceedings
of the British Machine Vision Conference, pages
80.1–80.11, Aberystwyth, Wales. BMVA Press.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio,
M., Moore, R., Kipman, A., and Blake, A. (2011).
Real-time human pose recognition in parts from
single depth images. In Proceedings of the 2011
IEEE Conference on Computer Vision and Pattern
Recognition, pages 1297–1304, Washington, DC,
USA. IEEE Computer Society.
Sung, J., Ponce, C., Selman, B., and Saxena, A. (2012).
Unstructured human activity detection from rgbd
images. In Robotics and Automation (ICRA), 2012
IEEE International Conference on, pages 842–849,
Washington, DC, USA. IEEE.
Uddin, M. Z., Thang, N. D., Kim, J. T., and Kim,
T.-S. (2011). Human activity recognition using body
joint-angle features and hidden markov model. ETRI
Journal, 33(4):569–579.
Vieira, A. W., Nascimento, E. R., Oliveira, G. L., Liu, Z.,
and Campos, M. F. M. (2012). Stop: Space-time
occupancy patterns for 3d action recognition from
depth map sequences. In Proceedings of the 17th
Iberoamerican Congress, pages 252–259, Berlin,
Heidelberg. Springer-Verlag.
Wang, J., Liu, Z., Wu, Y., and Yuan, J. (2012). Mining
actionlet ensemble for action recognition with depth
cameras. In Proceedings of the 2012 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 1290–1297, Washington, DC, USA. IEEE
Computer Society.
Xia, L., Chen, C.-C., and Aggarwal, J. K. (2012). View
invariant human action recognition using histograms
of 3d joints. In CVPR Workshops, pages 20–27,
Washington, DC, USA. IEEE.
Yao, A., Gall, J., Fanelli, G., and Van Gool, L. (2011).
Does human action recognition benefit from pose
estimation? In Proceedings of the British Machine
Vision Conference, pages 67.1–67.11, Aberystwyth,
Wales. BMVA Press.
Yun, K., Honorio, J., Chattopadhyay, D., Berg, T., and
Samaras, D. (2012). Two-person interaction detection
using body-pose features and multiple instance
learning. In Computer Vision and Pattern Recognition
Workshops (CVPRW), 2012 IEEE Computer Society
Conference on, pages 28–35. IEEE.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
82
