
A Developmental Approach to Concept Learning
Liesl Wigand, Monica Nicolescu and Mircea Nicolescu
Department of Computer Science and Engineering, University of Nevada, Reno, U.S.A.
Keywords:
Machine Learning, Support Vector Machine, Isomap, Dimensionality Reduction, Classification.
Abstract:
The ability to learn new concepts is essential for any robot to be successful in real-world applications. This
is due to the fact that it is impractical for a robot designer to pre-endow it with all the concepts that it would
encounter during its operational lifetime. In this context, it becomes necessary that the robot is able to acquire
new concepts, in a real-world context, from cues provided in natural, unconstrained interactions, similar to a
human-teaching approach. However, existing approaches on concept learning from visual images and abstract
concept learning address this problem in a manner that makes them unsuitable for learning in an embodied,
real-world environment. This paper presents a developmental approach to concept learning. The proposed
system learns abstract, generic features of objects and associates words from sentences referring to those
objects with the features, thus providing a grounding for the meaning of the words. The method thus allows
the system to later identify such features in previously unseen images. The paper presents results obtained on
data acquired with a Kinect camera and on synthetic images.
1 INTRODUCTION
Most robotic systems perform simple, repetitive tasks
in static controlled environments, like factories. In or-
der to make robots feasible in a dynamic environment
among humans, they must be able to adapt and learn.
To this end, it is valuableto provide methods by which
a robot can learn new primitive concepts in a real-
world environment as a human might. The problem
of concept learning has been widely studied in the
fields of computer vision and machine learning, both
as concept learning from visual images, or as abstract
concept learning. However, the existing approaches
address this problem in a manner that makes them un-
suitable for learning in an embodied, real-world envi-
ronment.
The field of computer vision has provided a wealth
of approaches for learning of concepts from visual
images. In the vast majority, the learning problem is
to associate each image with a unique class, of which
the object is a member. The focus is on creating al-
gorithms that better discriminate between the mem-
bers of different classes. While being important for
a large class of applications, this approach limits the
learning problem to a single “feature” of the object,
which in most cases is the object’s name. Psycholog-
ical research (Bloom, 2002; Horst et al., 2005) indi-
cates that humans perceive and use objects from the
perspective of their multiple characteristic features or
possible uses. Features such as size, texture, weight,
etc. are typically present in all objects. However, the
standard classification approach prevents any gener-
alization of objects at this level. For example, a sys-
tem that would be trained with images of blue books
(class 1) and red balls (class 2) would only be able to
distinguish between those classes. If presented with
a red book the system would be unable to say any-
thing about the new object, although it had seen books
and red objects before. Humans learn to recognize
these separate features and are able to generalize from
them, although they might have not seen an identical
object before. The ability to generalize at this level
is essential for any robotic system that is to be used
in real-world applications, given that it is impractical
to pre-train a robot with all possible objects it might
need to recognize for its tasks. The concept learning
problem has also been widely addressed in the field
of machine learning. The learning problem is stated
as inducing abstract concepts from combinations of
multiple features. For each feature, appropriate val-
ues are provided in a feature-value pairs array, which
are used to generalize the characteristic features of
the concept. While these methods are very successful
when given training information in the above form,
they could not be directly applicable to a system that
needs to learn from real-world interactions. First, the
symbol grounding problem is avoided by providing
the learning system with direct labels for the train-
337
Wigand L., Nicolescu M. and Nicolescu M..
A Developmental Approach to Concept Learning.
DOI: 10.5220/0004483803370344
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 337-344
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

ing samples. Second, an assumption is made that it
is known which value corresponds to each feature,
for example such that small and large are values of
the size feature. Third, it is also assumed that a sin-
gle training sample contains information about all the
relevant features of the concept, which are known in
advance and pre-selected by the user. In practice,
robots would need to learn from information extracted
from the sensors, and would have to solve the symbol
grounding problem by relating their observationswith
verbal cues provided by a human user. The learning
information is also not structured as complete feature-
value arrays, but rather comes from natural means of
communication (such as speech or visual cues), which
by nature cannot express information in this way. A
human user might only mention that an object is large
or small, but not that these values relate to the object’s
size. In addition, it is not ensured that a human would
enumerate all the attributes of an object of interest, to
provide the complete information.
This paper takes a developmental approach to
concept learning, in order to address the above lim-
itations. The hypothesis is that robots need to be able
to learn from visual and auditory cues during interac-
tions with human teachers, in an incremental fashion,
in a manner similar to how young children acquire
new concepts.
The remainder of the paper is structured as fol-
lows: Section 2 discusses related research, Section 3
describes our approach, Section 4 presents our results
and Section 5 gives a summary of our work.
2 RELATED WORK
Concept learning is a significant research problem,
which has been addressed in computer science, cogni-
tive science, neuroscience and psychology. This sec-
tion presents related research in these areas.
The goal of psychology and child development re-
search, as it relates to concept learning, is to under-
stand the mechanisms that underlie the formation of
concepts in children and humans in general. Various
aspects of this problem have been explored. (Schyns
et al., 1998) explore the interplay between the high-
level cognitive process over the perceptual system,
which gives rise to new concept formation. (Feldman,
2003) proposes a principle that indicates that people
induce the simplest categories consistent with a given
set of examples and introduces an algebra for repre-
senting human concept learning. (Kaplan and Mur-
phy, 200) evaluate the effect of prior knowledge on
category learning and suggest that the category exem-
plars as well as prior knowledge about the category’s
domain influence the learning process. The concept
learning approach proposed in this paper aims to build
a feature space for representing the concepts. The is-
sue of category dimensionality has been examined in
(Hoffman and Murphy, 2006), supporting the moti-
vation to address this problem at the level of the ob-
ject feature space. This approach is consistent with
findings in child psychology research, which indicate
that children start by learning the individual features
and only form a single category after more exten-
sive familiarization (Horst et al., 2005). (Mayor and
Plunkett, 2008) presents work quite close to ours, as
they learn to associate spoken words with the image
of the associated object in order to model early word
learning. In contrast our method attempts to associate
words with whatever they refer to within an image,
whether that be the entire object or a piece, position,
or characteristic of the object.
This paper takes the view that a robot should learn
by using both language and vision input, which stud-
ies in neuroscience and psychology have found likely
in human children (Scholl, 2005), (Pinker, 2007). The
simple comparison of sights and sounds may allow an
infant to develop a world model, and development re-
lies on interaction with people and the environment.
For more information on developmental robotics see
(Lungarella et al., 2003). Most previous work done
with images and text has been done in data mining.
For example, images from the internet can be auto-
matically associated with labels, as those on websites
like Flickr, or web pages related to keywords can be
retrieved. Usually the focus of these works is not to
learn the meaning of the words but to accurately label
the images so that a user may find them quickly with a
text search. However this is really the same problem,
and many of these techniques may be applied here, es-
pecially methods used to eliminate poor labels which
are common in internet databases (Brodley and Friedl,
1999). There has been much work done purely on im-
ages or on text, such as in the cases of document re-
trieval and content-based image retrieval, which rely
on word features or image features, not on both. For
a more complete review of existing methods see (Lew
et al., 2006).
The field of computer vision provides a wide spec-
trum of approaches to this problem. (Huang and Le-
Cun, 2006) proposes a combination of support vector
machines (SVMs) and convolutional nets to charac-
terize objects in variable conditions of illuminations
and with multiple different viewpoints. (Yang and
Kuo, 2000) uses content as the relevant feature to
categorize images. (Wolfgang Einhauser and Konig,
2002) demonstrates how a hierarchical neural net-
work evolves structures invariant to features such as
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
338
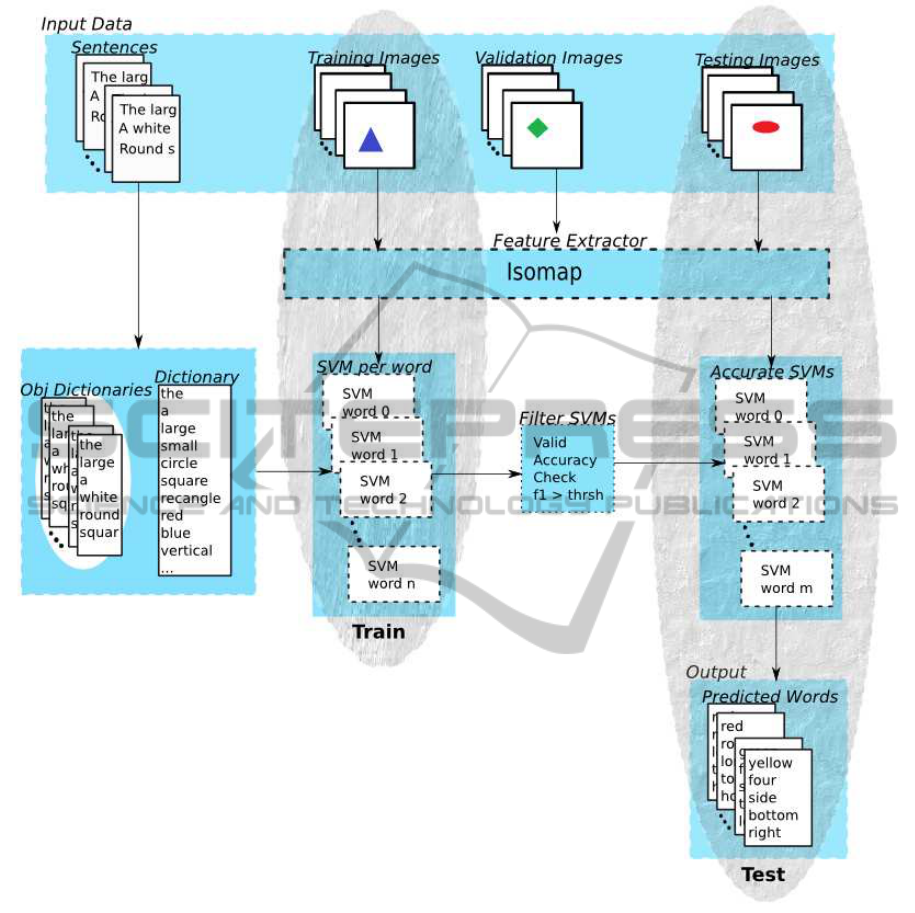
Figure 1: Training and Testing Process.
color and orientation, consistent with physiological
findings. (Piater and Grupen, 2000) presents an in-
cremental approach to learning the set of features nec-
essary for visual classification; whenever the system
has difficulty classifying an image, it seeks new fea-
tures that are capable of helping differentiate between
the multiple classes. Our proposed system assumes a
one class classification problem, where we can only
guarantee positive examples, not negatives. We make
use of one class SVMs, although it may be beneficial
to try neural networks in the future, which are similar
to SVMs in behavior, but less sensitive to parameter
choice (Khan and Madden, 2010). Techniques from
these methods may be used in a system that relies on
both images and text to find correspondences. For ex-
ample the features used to relate images may be used
to represent images in our system, and the processes
used to eliminate unimportant words could be used
the same way in our system. For now we use fea-
tures provided by Isomap in order to avoid features
that may be specific to a word, and assume that the
result of classification can be used to indicate whether
a word should be eliminated (Uzwyshyn, 2009).
The work proposed in this paper departs from the
standard computer vision and machine learning tech-
niques in several important directions. With regards
ADevelopmentalApproachtoConceptLearning
339

to computer vision, the difference in our techniques is
that we aim at learning concepts at the level of their
main characteristic features, rather than at the level
of a single class. In the proposed approach, one ob-
ject will be a member of multiple classes (e.g., a book
can be both large and red) and different objects will
be members of the same class (e.g. a book or a ball
could be both large). The goal is to learn a multi-
dimensional space of features, which could be used
to characterize previously unseen objects. With re-
spect to the machine learning techniques, this work
departs from the assumptions related to the structure
of the training data and propose an approach that uses
visual and text input, similar to that which would be
provided in natural interactive scenarios.
3 APPROACH
Our general approach is similar to how parents teach
young children things about the world: while pointing
to an object that captures the childs attention, or by
showing an object to the child, a parent describes the
object saying things like “That’s yellow”, “Look at the
big box!”, “Keep this stick vertical”. Over time, and
with sufficient examples, the child learns the meaning
of yellow, big and vertical and is able to recognize
these features in objects previously unseen.
The hypothesis of our work, as indicated by meth-
ods such as Isomap (Tenebaum et al., 2000) is that
lower dimensionality spaces obtained through such
methods incorporate significant relevant features of
the data, such as for example an object’s size, orien-
tation, or shading. However, these algorithms stop at
the level of classification, and do not attempt to auto-
matically infer the relation that the actual object fea-
tures have with the reduced feature space. The goal
of this work is to build on the dimensionality reduc-
tion paradigm in order to provide an automated way
for learning the correspondence between the reduced
feature space and the physical features of the data.
Our methodology follows a two stage approach:
(1) unsupervised dimensionality reduction for feature
extraction and (2) learning of word-feature relations.
The validation consists of characterizing a previously
unseen object in terms of its features, based on the
learned feature space.
We created a database of images, combining ar-
tificial images and images of objects gathered using
a Kinect camera. We described all the images us-
ing complete English sentences, similar to utterances
that a parent would say to a child when talking about
the object in the image. The artificial data consists of
500 by 500 color images of shapes of varying colors,
Figure 2: Example synthetic images.
sizes and positions on a plain white background, as
seen in Figure 2. We do not use spoken sentences
or words, but use text. It has been shown that spoken
language can be learned and separated into words, and
that these sound signal can be used directly as labels,
but this is not our focus. For each image a text file
is created by a human which consists of a sentence
per line describing the shape or some feature of the
image. At the moment these sentences are assumed
to be positive to avoid any language processing, for
example a sentence may be “The shape is round” but
cannot be “The shape isn’t round.” There are also sup-
plemental files which attempt to list negative labels,
which are used to check results.
In practice this may not be complete enough: one
user may say a thing is round, and another may dis-
agree. For now we assume that labels are not sub-
jective. We also have a greyscale generated dataset,
in order to test accuracy with color removed. The
non-synthetic dataset is a collection of Kinect images
gathered in the lab and combined with the RGB-D
dataset (Lai et al., 2012), at 640 by 480 resolution.
These images were masked to removethe background
and every object is roughly at center, with some noise
from the background still present (see Figure 3).
These were similarly labeled by users who described
Figure 3: Example masked Kinect images from the RGB-D
database.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
340

them in complete sentences, and supplemented with a
set of negative labels for truth testing. All images are
currently stored as PNG files. A simple data collec-
tion system was constructed to get images of more ob-
jects. This system used a Kinect and the Point Cloud
Library to grab point clouds from the Kinect (Bog-
dan Rusu and Cousins, 2011). These point clouds
are then processed using a depth filter to remove most
of the background, and a planar segmenter based on
RANSAC which removes the flat surface on which
objects are assumed to lie. From this data an image is
generated with a white value given to all empty space.
There is no additional noise removal, since it did not
seem necessary in this setup. In future projects the
depth information may be used as well to more accu-
rately describe the concepts to be learned.
3.1 Feature Extraction
In this step we perform feature extraction by apply-
ing Isomap to the image training data, which reduces
the feature space from several hundred thousand to
around a hundred features. This improves generaliza-
tion and shortens training times. Isomap is a form of
multi-dimensional scaling which preserves geodesic
distance rather than Euclidean. Generally, the user
selects an initial goal number of dimensions to reduce
to, although some algorithms reduce dimensions un-
til an error threshold is crossed. This algorithm may
have problems if too few or too many neighbors are
used for the search, and also has trouble if points are
moved off the manifold by noise. This does not have
a significant effect in the current system, but for better
results on real data it may be necessary to change to
another method.
Several other dimensionality reduction techniques
were considered, and may be used in the future. One
which was implemented and tested, created overlap-
ping patches of the images, and used K-Means Clus-
tering to determine template types of patches in the
images, as seen in (Coates et al., 2010). These types
were then used as features, so that patches would be
collected from an image, and its representative feature
vector would indicate which patch types were present
in the image. It was determined that k would need
to be very large to avoid loosing information, espe-
cially with real data. Isomap, in this case, was better
for our data, but also requires more memory and time.
This method may be useful on larger datasets, where
the gain in dimensions becomes less important then
speed and space taken up by the reduction method.
3.2 Learning Word-feature Relations
Once the feature vectors for the images have been
created, a one class SVM is trained for each word,
as follows. The sentences describing the images are
stripped of punctuation, and transformed to all lower
case. In the future both punctuation and capitalization
may be useful to differentiate words, but for now they
are assumed to be unimportant. Words that occur too
frequently or infrequently are removed and no SVM
is trained. For now this limit is set at less than 5%
of samples or more than 95%. This is to avoid both
“stop” words which occur everywhere (is, a, the), and
rare words from which the SVM can learn little (ver-
tically for example, occurred once.) This is a “bag of
words” approach, and it may be useful at a later time
to use bigrams (word pairs) as labels to determine cor-
relation of features. For each word, for example red,
we collected all of the images for which that word has
occurred in any sentence relative to it. This produced
a set of images in which there is a high probabilitythat
an object with the color red may be present. For each
word, using this subset of images we trained a one
class support vector machine. A portion of the data
was held out for validation, and testing to ensure that
the resulting SVM can recognize the word in unseen
samples, and thus generalize to objects and combina-
tions of features it has not seen before. Due to the
assumption that words in sentences are positive labels
we do not have any images labeled as negative exam-
ples. Furthermore, as mentioned previously, deciding
negative examples may prove difficult as descriptions
may be subjective. SVMs are good at classifying high
dimensional data, and are efficiently represented as
well, although one class SVMs may not perform as
well. A one class SVM assumes that the training data
is only of a single class, and attempts to fit a hyper-
plane to that class. This results in a very strict border
on the training data, which can be a problem if the
training data does not represent that class completely.
At the present the system is using a radial basis func-
tion with a degree of 3, and 0.3 as the upper bound on
training error, although degree of 2, 4 and errors of .2,
.4 and .5 were also tested, and did not perform as well
across the data. In future versions these parameters
will be set using grid search on a per word basis.
4 RESULTS
The system was tested on a set of 128 generated im-
ages and 134 real objects. This data was split into
positive training cases and a mix of positive and un-
known testing cases. These included features and ob-
ADevelopmentalApproachtoConceptLearning
341
jects that were not seen in the training data. The test
cases were in some cases labeled negative in the afore
mentioned ground truth, and other times unlabeled if
the true label was ambiguous (for example, a label
such as “several” which may or may not describe a
learnable feature). Where the true label was unde-
fined, the result was not counted for or against the
system’s accuracy, but was used as input for manual
adjustment of the system. This included updating the
ground truth, and testing methods for adding positive
examples. The dictionary for generated data was 91
words, and the real data was 195 words. In both cases
the descriptive word which we expect to be learnable
(nouns, adjective, and some adverbs) are over 60 per-
cent of the words. It was implemented in Python, us-
ing the Python Image Library and numpy to store and
process images, and scipy to plot data. Scikit learn
was used for scaling, Isomap, and one class SVMs
(Pedregosa et al., 2011). Training takes roughly 40
minutes without memory limits, but nearly an hour
and a half with memory limits.
4.1 Feature Extraction Results
The isomap dimensionality reduction was given a
limit of 100 dimensions to reduce to. The generated
data reduced from 750000 features (raw color images)
to 75 features. This is essential for the success of the
SVM, which is generally good for datasets where the
number of features exceed the number of samples, but
still performs poorly if the number of features greatly
exceeds the number of samples. It is possible that the
raising the dimension of the final feature space will
aid in learning certain complex words, but this may
also cause the SVMs to fail.
4.2 Word-feature Learning Results
The results for the synthetic data indicate that features
such as color, shape and location can all be learned in
this simple manner. Many of the words had too many
Table 1: Generated Data Results: 128 total samples, per-
mitted error of 0.2, degree 3, radial basis kernel.
Word Samples Precision Recall F1
“yellow” 22 1.0 0.45 0.62
“four” 26 1.0 0.5 0.66
“black” 37 1.0 0.62 0.76
“circle” 37 1.0 0.54 0.70
“triangle” 38 1.0 0.52 0.68
“square” 21 1.0 0.33 0.5
“blue” 18 1.0 0.5 0.66
“red” 17 1.0 0.64 0.78
or too few examples, but these words were mainly
stop words. For example shape occurs in almost every
case, as in “The shape is yellow.” We calculate preci-
sion, recall and F1 score based on the predicted labels
compared to the ground truth. If a label is not indi-
cated in the ground truth, the example is not used in
calculating the scores, but is listed as an “unknown.”
The results are summarized in Table 1 for a subset of
the data, with Table 2 containing several words which
performed well, but with many unknown ground truth
labels. Essentially these words may be learnable, but
should have improved ground-truth for example cor-
ners was used with rectangles, squares and triangles,
but due to 18 images not being labeled as either hav-
ing corners or not, further testing is needed to verify
these results.
Table 3 contains similar results with a different
error permitted by the one class SVM. The error for
this was increased to 0.3 permitted, which resulted in
significantly better scores on some labels such as four
and square, but worse results on others such as red.
This indicates that the process used here can perform
better, but it is impossible to know how significant the
change will be.
The real data did not perform as well as the arti-
ficial images. While colors which were well repre-
sented did well, almost every other word in the data
set was used only once, or only with a single object
which occurred several times. The result is that a
word like shiny might occur only with regards to a
flashlight, and could then be associated with any of
the flashlight’s features. It is likely that a much larger
dataset will be necessary for real data to show any
valuable results, since the dictionary is too broad to
be captured in a hundred objects. The results from
the words that succeeded may need more examples
as well, since the features have a broader range on
real objects. For example red in the generated data
set is a single color, however, red in real objects is
many shades. While the results indicate that the sys-
tem is learning color across shades, if more shades
Table 2: Generated Data Results with many unknowns: 128
total samples, permitted error of 0.2, degree 3, radial basis
kernel.
Word Samples Precision Recall F1
“three” 24 1.0 0.66 0.8
“top” 19 1.0 0.63 0.77
“oval” 27 1.0 0.55 0.71
“right” 19 1.0 0.47 0.64
“corners” 46 0.96 0.56 0.71
“round” 34 1.0 0.55 0.71
“upper” 16 1.0 0.5 0.66
“shape” 77 1.0 0.74 0.85
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
342
were present that may change. To see the color re-
sults for real data see Table 4.
Table 3: Generated Data Results: 128 total samples, per-
mitted error of 0.2, degree 3, radial basis kernel.
Word Samples Precision Recall F1
“yellow” 22 1.0 0.36 0.53
“four” 26 1.0 0.57 0.73
“black” 37 1.0 0.56 0.72
“circle” 37 1.0 0.62 0.76
“triangle” 38 1.0 0.52 0.68
“square” 21 1.0 0.66 0.8
“blue” 18 1.0 0.33 0.5
“red” 17 1.0 0.41 0.58
Table 4: Real Data Results: 128 total samples, permitted
error of 0.3, degree 3, radial basis kernel.
Word Samples Precision Recall F1
“yellow” 22 1.0 0.64 0.78
“black” 34 1.0 0.64 0.78
“blue” 35 1.0 0.74 0.85
“purple” 10 1.0 0.6 0.75
“red” 60 0.83 0.73 0.77
“white” 36 1.0 0.58 0.73
4.3 Discussion and Future Work
We found that when collecting sentences about the
objects, they were not described completely. So a red
square may be described as red, or square, but not al-
ways as both. This should not be a concern as long as
the training data covers the class well. Another dif-
ficulty results from our system’s lack of knowledge
about the language: it cannot make assumptions about
the presence of one word implying the absence of an-
other, for example a red object may also be described
as orange. This means that as well as being unable
to determine if a label is present or not if the word is
missing, we can also make no assumptions about ex-
clusivity of the labels. Since this is in part, a feature of
human language, it makes creation of ground truth la-
bels difficult. In training many people may agree that
an object is red, but another person may say it is ma-
roon, making it difficult to say that a label is correct
or not. For now we assume that our ground truth set
is accurate and does not conflict with the user labels.
The main problem of the one class classifier is a
high false negative rate. Since it fits to only positive
examples, it can exclude negatives very well. How-
ever, if the training data did not cover the class well,
or if the hyperplane did not fit to all examples (degree
too small, permitted error too small), or there is noise
in the data which moves it off of the hyperplane, then
the classifier can have a high false negative rate. This
can be seen in the analysis of our system’s results.
Handling this problem is a major goal of future work.
Many of the parameters (SVM error, SVM degree,
Isomap neighbors, Isomap dimension) need to be set
procedurally to find the best combination. Isomap
takes up a large amount of time and space, and is
not robust to noise. It may be necessary to replace it
with another method, especially if more data is added.
More Kinect data is needed, of more objects, and
with varying features. We have looked into several
other methods lately, of which the most promising
is an autoencoding convolutional neural network, as
seen in (Masci et al., 2011). The CNNs are meant to
function on 2 dimensional (or higher) data and main-
tain locality, while the autoencoding forces a com-
pressed encoding, and use of a denoising autoencoder
ensures robustness to noise and missing data. More
sentences describing objects should also be collected,
to broaden the vocabulary and collect more examples
of rarely used words. Similarly the ground truth set
needs to be updated, due to the fact that many of the
words describing the real data were not listed as either
true or false, and so these results could not be verified.
This may require a better categorization, since several
words have multiple meanings. This means it may be
necessary to identify multiple clusters within a word’s
training set and treat them as separate words. Other
techniques for processing images, and correcting la-
bels which were found during a literature search were
not implemented due to time constraints, but may im-
prove future results. Furthermore, we plan to develop
an interactive approach to data collection, in which
auditory and visual training data is acquired directly
by a robot through interactions with human users.
5 CONCLUSIONS
This paper presented an approach to developmental
concept learning from images and text, in order to
associate attributes extracted from the images with
words. The system relies on feature extraction and
one class classification to accomplish this goal. The
results indicate reasonable success of around .7 to .8
F1 score on simple color, shape and location words.
In general, lower scores resulted where few examples
were given, or the word was more complex, as in the
cases of vertically, shiny, or even handle. Overall
the results are encouraging, although better results on
non-synthetic data is necessary to prove the utility of
this approach.
Further extending this approach can lead to a sys-
tem that can be used as a basis for learning human
ADevelopmentalApproachtoConceptLearning
343

communication. This will allow for better robot col-
laborators, which can learn interactively in similar
ways in which humans learn from each other.
REFERENCES
Bloom, P. (2002). How Children Learn the Meaning of
Words. MIT Press.
Bogdan Rusu, R. and Cousins, S. (2011). 3d is here: Point
cloud library (pcl). In IEEE International Robotics
and Automation (ICRA).
Brodley, C. E. and Friedl, M. (1999). Identifying misla-
beled training data. Journal of Artificial Intelligence
Research, 11:131–167.
Coates, A., Lee, H., and Ng, A. Y. (2010). An analysis of
single-layer networks in unsupervised feature learn-
ing. In Advances in Neural Information Processing
Systems.
Feldman, J. (2003). The simplicity principle in human con-
cept learning. Current Directions in Psychological
Science, 12(6):227–232.
Hoffman, A. B. and Murphy, G. L. (2006). Category dimen-
sionality and feature knowledge: When more features
are learned as easily as fewer. Journal of Experimen-
tal Psychology: Learning, Memory, and Cognition,
32(3):301–315.
Horst, J., Oakes, L., and Madole, K. (2005). What does it
look like and what can it do? category structure in-
fluences how infants categorize. Child Development,
76(3):614–631.
Huang, F. J. and LeCun, Y. (2006). Large-scale learning
with svm and convolutional nets for generic object
characterization. In Proc., IEEE Conf. on Computer
Vision and Pattern Recognition.
Kaplan, A. and Murphy, G. (200). Category learning with
minimal prior knowledge. Journal of Experimen-
tal Psychology: Learning, Memory and Cognition,
26(4):829–846.
Khan, S. S. and Madden, M. G. (2010). A survey of recent
trends in one class classification. In Articial Intelli-
gence and Cognitive Science - 20th Irish Conference.
Lai, K., Bo, L., Ren, X., and Fox, D. (2012). Rgb-d (kinect)
object database. http://www.cs.washington.edu/rgbd-
dataset/index.html.
Lew, M., Sebe, N., Djeraba, C., and Jain, R. (2006).
Content-based multimedia information retrieval: State
of the art challenges. ACM Transactions on Multime-
dia Computing, COmmunications, and Applications.
Lungarella, M., Metta, G., Pfeifer, R., and Sandini, G.
(2003). Developmental robotics: A survey. Connec-
tion Science, 15:151–190.
Masci, J., Meier, U., Cires¸an, D., and Schmidhuber, J.
(2011). Stacked convolutional auto-encoders for hi-
erarchical feature extraction. In International Confer-
ence on Artificial Neural Networks.
Mayor, J. and Plunkett, K. (2008). Learning to associate ob-
ject categories and label categories: A self-organising
model. In Proceedings of the 30th annual conference
of the Cognitive Science Society, pages 697–702.
Pedregosa, F., Varoquaux, G., Granfort, A., Michel, V.,
Thirion, B., Grisel, O., M., B., Prettenhoffer, P.,
and et. al. (2011). Scikit-learn: machine learning
in python. Journal of Machine Learning Research,
12:2825–283.
Piater, J. and Grupen, R. (2000). Constructive feature learn-
ing and the development of visual expertise. In Proc.,
Intl. Conf. on Machine Learning, Stanford, CA. Mor-
gan Kaufmann.
Pinker, S. (2007). The Language Instinct. Harper Perennial
Modern Classics, New York.
Scholl, B. (2005). The innate mind: structure and contents.
Oxford University Press.
Schyns, P., Goldstone, R., and Thibaut, J.-P. (1998). The de-
velopment of features in object concepts. Behavioral
and Brain Sciences, 21(1):1–54.
Tenebaum, J. B., de Silva, V., and Langford, J. C. (2000). A
global geometric framework for nonlinear dimension-
ality reduction. Science, 290:2319–1323.
Uzwyshyn, R. (2009). An arbitrage oppurtunity for image
search and retrieval. Bulletin for the American Society
for Information Science and Technology, 35.
Wolfgang Einhauser, Christoph Kayser, K. K. and Konig,
P. (2002). Learning multiple feature representations
from natural image sequences. In Proc., Intl. Conf. on
Artificial Neural Networks.
Yang, Z. and Kuo, J. (2000). Learning image similarities
and categories from content analysis and relevance
feedback. In Proc., ACM workshops on Multimedia,
pages 175–178.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
344
