
Evaluation of the Fusion of Visible and Thermal Image Data for People
Detection with a Trained People Detector
Achim K
¨
onigs and Dirk Schulz
Unmanned Systems Group, Fraunhofer FKIE, Fraunhoferstr. 20, 53343 Wachtberg, Germany
Keywords:
People Detection, Thermal Imaging, Image Processing, Data Fusion.
Abstract:
People detection surely is one of the hottest topics in Computer Vision. In this work we propose and evaluate
the fusion of thermal images and images from the visible spectrum for the task of people detection. Our main
goal is to reduce the false positive rate of the Implicit Shape Model (ISM) object detector, which is commonly
used for people detection. We describe five possible methods to integrate the thermal data into the detection
process at different processing steps. Those five methods are evaluated on several test sets we recorded. Their
performance is compared to three baseline detection approaches. The test sets contain data from an indoor
environment and from outdoor environments at days with different ambient temperatures. The data fusion
methods decrease the false positive rate especially on the outdoor test sets.
1 INTRODUCTION
There are several reasons to detect people in the sen-
sor data of mobile unmanned systems. One is to
navigate more cooperative in the proximity of mov-
ing people. This requires a high detection rate but
does not suffer much from false positives. Other ap-
plications like service robots where one might want
to control a nearby robot using gestures or want an
unmanned system to follow a certain person through
a crowded area need to reduce false positives to be
useful. In other scenarios where unmanned systems
might be deployed in the future, like disaster re-
sponse or surveillance tasks, false positives should be
avoided as much as possible without lowering the de-
tection rate.
There exist a lot of approaches to people detection
in the computer vision community that work on im-
ages from the visible spectrum. Not all of them can be
deployed on unmanned systems. Some cannot handle
moving cameras whereas others are to slow to pro-
duce results in a close to real-time fashion which is re-
quired in the scenarios described above. The remain-
ing approaches to people detection, however, cannot
deliver the required high detection rates and low false
positive rates at the same time. For all detection sys-
tems a low false positive rate means also a lower de-
tection rate. In order to overcome this we propose to
fuse visible spectrum images with thermal images. In
thermal images background structures which would
Figure 1: Camera setup. The USB camera is mounted on
top of the thermal camera so they both capture images of
the same scene.
cause false positive detections in the visible spectrum
are usually only barely visible because their tempera-
ture signature is not very different from the remaining
background. All in all, in thermal images the person
tends to be clearly visible even if for outdoor scenar-
ios the assumption that persons are a hot spot not al-
ways holds (see Figure 2).
In this work we use the Implicit Shape Model
(ISM) (Leibe et al., 2008) object detector trained on
people and propose five methods to fuse visible spec-
trum and thermal data during the detection process.
These different methods influence the detection pro-
cess in the feature and decision levels. At the same
time we use unmodified ISM as baseline algorithm
on both visible spectrum and thermal images. Addi-
tionally we implement a thermal threshold based blob
detector (short blob detector) as second baseline. For
345
Königs A. and Schulz D..
Evaluation of the Fusion of Visible and Thermal Image Data for People Detection with a Trained People Detector.
DOI: 10.5220/0004484203450352
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 345-352
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 2: On this thermal image, the person has a very low
contrast to the background, because of high temperatures in
the surroundings. This makes it impossible to find a fixed
temperature threshold to separate person and background
reliably.
the evaluation we recorded three datasets, one from
indoors and two from outdoors on two different days
with different ambient temperatures.
The remainder of this paper is organized as fol-
lows. First we give an overview of other approaches
to people detection on thermal or fused data in sec-
tion 2. Then we describe the two baseline algorithms
in section 3. The fusion methods are explained in
section 4. Our datasets and the experiments we per-
formed are presented in section 5 followed by a short
conclusion in section 6.
2 RELATED WORK
People detection is an important and very active re-
search topic. People detection is done with a lot of
different sensors and different techniques. In order to
stay in scope, we will only discuss a subset of litera-
ture available on this broad topic. For a broader sur-
vey about people detection methods in the visible and
thermal spectrum see (Enzweiler and Gavrila, 2009)
or (Gero andnimo et al., 2010).
First we will talk briefly about people detection
in visible spectrum images and explain why we did
choose ISM as our baseline algorithm and as basis for
modifications. Then we will give a short overview of
people detection in thermal images. In the end we
talk about approaches that use the thermal and visible
spectrum for people detection at the same time.
2.1 Visible Spectrum Images
People detection in the visible image space is still a
very active research topic. Recent advances in people
detection (Dalal and Triggs, 2005; Leibe et al., 2008;
Leibe et al., 2005; Schiele et al., 2009) show good de-
tection rates and are quite time efficient. In this work
the FastPRISM detector from Lehmann (Lehmann
et al., 2010) is used. It is an advanced variant of
Leibe’s implicit shape model (ISM) detector (Leibe
et al., 2008). On the one hand, it improves stochastic
reasoning and allows discriminative learning, and on
the other hand, it proposes a necessary acceleration of
the ISM method. The acceleration is achieved by ap-
plying the Efficient Subwindow Search (ESS) method
proposed by Lampert (Lampert et al., 2008) to the
feature centric view of ISM by Lehmann (Lehmann
et al., 2009).
The feature centric view makes ISM (and Fast-
PRISM) very robust against missing data. Missing
data can occur for partly occluded people. But the
robustness against missing data also helps during the
fusion, if one of the fused spectra delivers only few
features.
2.2 Thermal Images
One very popular approach to people detection on
thermal images is the detection of hot spots, in most
cases by applying a fixed temperature threshold. Of-
ten after that step only heuristics over the human size
are applied to distinguish people from non-human
heat sources (Cielniak and Duckett, 2004; Serrano-
Cuerda et al., 2011; Li et al., 2010). All those ap-
proaches are based on the assumption that people
are generally warmer than the background. For in-
door scenarios this assumption holds, but for out-
door scenarios this often is wrong as Goubet shows
in (Goubet, 2006). We can confirm this observation
from our own experience; Figure 2 shows an exam-
ple where the person is actually colder than parts of
its environment, making constant temperature thresh-
olds unfeasible. There are more sophisticated meth-
ods like (Davis and Sharma, 2004). However, they
often heavily rely on statistical background subtrac-
tion. For statically mounted surveillance cameras this
makes perfect sense, but on mobile robots this ap-
proaches does not work. As soon as the robot starts
moving the previously calculated statistical model of
the background is worthless, because the whole back-
ground has changed and the subtraction does not work
anymore.
The use of a Histogram of Gradients (HOG, by
Dalal and Triggs in (Dalal and Triggs, 2005)) like de-
tector on thermal images is proposed by Miezianko
and Pokrajac in (Miezianko and Pokrajac, 2008).
Which is similar to the work of Zhang et al. (Zhang
et al., 2007). They compare the performance of HOG
like detectors on thermal data to the performance on
visible spectrum images. The evaluation is carried
out on thermal images and images from the visible
spectrum. However, the images do not show the same
scenes, which hinders the comparison of the results
on thermal data against the results on images from the
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
346

visible spectrum. A fusion of the thermal and visible
spectrum is not possible with their data and does not
seem to be in their interest.
2.3 Image Fusion
Goubet et al. are one of the first to propose the fu-
sion of thermal and visible spectrum images (Goubet,
2006) for people detection. They fuse the two im-
ages on the pixel level using a weighted sum creating
a new gray scale image in which changes are detected
and heuristics about the size of people are used fil-
ter out people. A much more sophisticated method
is proposed by Han et al. in (Han and Bhanu, 2007),
which works on silhouettes from both spectrum im-
ages. Both approaches rely heavily on background
subtraction, though, which forbids the usage on mo-
bile robots. Another low level fusion approach is pre-
sented in (San-Biagio et al., 2012). They fuse the
images at pixel level and calculate covariance matrix
descriptors that they use as features for later stages.
So the features contain information from both spec-
tra. For that they need a very good registration of
thermal and visible spectrum camera. They circum-
vent the lack of a suitable interest operator for such
features by using a dense feature map which is very
expensive to calculate and therefore not feasible for
applications on mobile robots.
In contrast to the very low level fusion that Goubet
et al. propose, Serrano-Cuerda et al. propose a deci-
sion level fusion in (Serrano-Cuerda et al., 2011). An
detector is applied to the visible spectrum image and
the thermal image separately and the results are joined
in the end. The detection in the color image is done
by background subtraction and color segmentation.
On thermal data a simple blob detector is used. A
simple blob detector for the thermal data is also used
in (Cielniak and Duckett, 2004). The detected blobs
are transferred to the visible spectrum image and a
feature vector is calculated from both images and fed
into different classification systems. Other works con-
centrate on the fusion of other modalities, like visi-
ble spectrum images and depth data in (Spinello and
Arras, 2012; Ikemura and Fujiyoshi, 2011) or visible
spectrum and near infrared images (Lietz et al., 2009).
2.4 Contribution
Previous work in (K
¨
onigs and Schulz, 2012) evalu-
ates a blob detector on thermal data against the more
advanced ISM detector applied on thermal data. This
evaluation is extended here to include different data
fusion approaches. Novel, to our knowledge, is the
direct comparison of fusion approaches on the fea-
ture level and on the decision level. Furthermore we
compare the performance of the proposed methods on
indoor and outdoor datasets which include both ther-
mal and visible spectrum images from the same scene
which allow a direct comparison of the algorithms.
So the main contribution of this work is an in-depth
evaluation of different fusion methods against detec-
tors working on unfused thermal and visible spectrum
data.
3 BASELINE ALGORITHMS
In this section we briefly introduce the algorithms
used as baseline to compare the fusion methods
against. First we describe the implementation of a
simple Blob Detector that is commonly used for peo-
ple detection in thermal images. Second we describe
the ISM detector and especially its voting mechanism,
which we modified in different ways to incorporate
thermal data into the detection process.
3.1 Blob Detector
We implemented a blob detector to work on the ther-
mal images in order to have a widely used baseline al-
gorithm for people detection on thermal images. The
Blob Detector first applies a thresholding to the ther-
mal image I with a fixed thermal threshold. The result
is a binary image. After that a morphological closing
is applied. The result is a smoothed binary image I
m
.
Now we search for contours in the image I
m
(see
(Suzuki and Abe, 1985)). The result is a set of blobs
B that depict connected components in the binary im-
age. For each of this blobs b = (x, y, w, h) ∈ B the dis-
tance to the average width w
p
and height h
p
of persons
in our test datasets is calculated and incorporated into
a confidence value b
c
:
b
c
= min(1 −
|w − w
p
|
w
p
, 1 −
|h − h
p
|
h
p
)
This confidence value b
c
is then tested against the de-
tection threshold.
3.2 Implicit Shape Models
The second baseline algorithm we use is FastPRISM
by Lehmann et al. (Lehmann et al., 2010). It is
a speed up variant of Implicit Shape Models (ISM)
originally developed by Leibe et al. (Leibe et al.,
2008). The detector operates on image features;
SURF (Bay et al., 2008) in the case of this work. It
is based on a codebook that is created during training
by clustering the observed features. For each of these
EvaluationoftheFusionofVisibleandThermalImageDataforPeopleDetectionwithaTrainedPeopleDetector
347

codebook entries the detector stores votes for the per-
son centers in vote images. During detection new fea-
tures are associated to the codebook entries by nearest
neighbor search in the feature space. Then they vote
for the possible person centers from the vote image
of the associated codebook entry. The votes are cast
into a voting space in which space local maxima of
accumulated votes are located and depicted as person
centers.
The improved algorithm of Lehmann et al. applies
a branch and bound search strategy for local max-
ima in the voting space without considering all pos-
sible person hypotheses. The algorithm starts with
the complete set of all possible hypotheses, splits it
along the dimension (row, column or size) with the
biggest extend and calculates scores for the two new
sets. These sets are inserted into a priority queue. In
the next step the set with the highest score is taken
from the queue and split again along the dimension
with the biggest extend. This is continued until a set
is found that contains only one hypothesis. With the
right score function S(Ω), only few sets of hypothesis
need to be checked which makes the detection very
fast. The score function that Lehmann develops for
FastPRISM is explained in great detail in (Lehmann
et al., 2009).
4 FUSION OF VISIBLE AND
THERMAL DATA
There are different possibilities to fuse visible and
thermal images for people detection. The lowest level
we look at in our evaluation is the feature level. We
propose to calculate SURF features from both the vis-
ible spectrum image and thermal image and present
them to our people detector as a combined set of im-
age features. This method will be called Merge Fea-
tures in the remainder of this work.
On a higher level, i.e. mid level, the detector it-
self incorporates both, visible and thermal data. We
propose two modifications to the voting step of Fast-
PRISM which draw hints from information in the
thermal image and otherwise still rely on visible data
for the detection. This fusion should be categorized
somewhere between feature level and decision level.
The highest level of fusion, i.e. decision level, is
to apply a people detector to the visible image and
another detector to the thermal image and then fuse
the results. This has the advantage that each detector
can be developed and trained independently, and can
be used on systems with only one of the data sources.
The issue here is that the detectors need to transport
their certainty about their detections to a fusion mod-
ule. This module then somehow needs to figure out
which detector to trust more, if they are disagreeing
about a certain detection. It also has the responsibility
to fuse detections, if they describe the same person.
4.1 Merge Features - Feature Level
Fusion
The lowest level we look at is the feature level. This
is, because the people detector we want to employ
acts on image features only. For this fusion step we
draw SURF features from both the visible spectrum
and thermal image independently and add them into
the same data structure. The SURF feature extractor
works on greyscale images and can be applied to ther-
mal images. The combined set of features from both
spectra is presented to the people detector which is
ignorant of where the single features came from.
4.2 Influencing the Voting Process - Mid
Level Fusion
For the mid level fusion we assume that people are
above a certain temperature. Because our thermal
camera does only deliver intensities and not tempera-
ture readings, this translates to people being above a
certain intensity value. This is close to the assumption
that people are warmer than their surroundings, but
not the same. The biggest difference is we use the in-
tensity values to only guide the detector that otherwise
is working on visible spectrum data. The goal here is
to guide the branch and bound process away from im-
age areas that are to cold to be a person and might be
hard to distinguish from a person in the visible spec-
trum image. We propose two different ways to influ-
ence the voting of the ISM detector which modify the
score function for a set of person hypotheses to guide
the detector.
4.2.1 Maximum Search
First the original score S(Ω) for the hypothesis set Ω
is calculated as in the original method from the fea-
tures of the visible spectrum image. Then the rectan-
gular region R
Ω
=
S
h∈Ω
R
h
of the thermal image T
is searched for the maximum value. R
Ω
corresponds
to the region that contains all rectangles R
h
for per-
son hypothesis h ∈ Ω. If that maximum is below the
thermal threshold t we assume that there cannot be a
person in this region of the image and we lower the
score for the hypothesis set. The equation is as fol-
lows:
S
max
(Ω) :=
S(Ω) max
p∈R
T (p) ≥ t
S(Ω) ∗ 0.9 max
p∈R
T (p) < t
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
348

4.2.2 Combination with Blob Detector
The Blob vote modification is the second mid level fu-
sion technique we propose. It combines the Blob De-
tector and the FastPRISM detector at vote level. At
first, again the score S(Ω) is calculated for the visi-
ble spectrum image as before. Then, additionally, the
set of person rectangles Ω
blob
:= {R
blob
∈ T } is cal-
culated with the Blob Detector from the thermal im-
ages. We again want to avoid image regions where
persons are unlikely, because the Blob Detector did
not find persons there. But we still want the trained
person detector to filter out false detections from the
Blob Detector. Therefor the image area of the hypoth-
esis set is calculated as R
Ω
=
S
h∈Ω
R
h
and compared
to the rectangles in Ω
blob
:
S
blob
(Ω) :=
(
S(Ω) ∗ 1.1 ∃R ∈ Ω
blob
: R ∩ R
Ω
6=
/
0
S(Ω) ∗ 0.9 ∀R ∈ Ω
blob
: R ∩ R
Ω
=
/
0
4.3 Join Detections - Decision Level
Fusion
As indicated before the highest level of fusion is to
have two detectors working independently on the vis-
ible spectrum and thermal image and then join the re-
sults. For the visible spectrum image we apply the
FastPRISM detector, as usual. For the thermal im-
age we have two choices. The first choice is to use
the FastPRISM detector also for thermal images. The
second choice is to use the Blob Detector we de-
scribed in section 3.1. We will evaluate both, later on.
The methods will be called Join Detections and Join
with Blobs, respectively, and summarized as decision
level fusion approaches.
For both methods the fusion of the results is done
straight forward. The result rectangles are compared
pairwise. If a pair is overlapping by more than 50%
only the result with the better score is used and the
score is set to the sum of the individual scores. Results
without a correspondence are just copied with their
original score.
5 EXPERIMENTS
The thermal images are taken from a thermal cam-
era of type EYE R640 from OPGAL with a resolu-
tion of 640x480 pixels. It delivers intensity values
that are automatically scaled to the currently observed
temperature range, i.e. it is impossible to interpret
the intensities as temperatures. For the images from
the visible spectrum we mounted a common Logitech
Quick Cam 9000 USB camera on top of the thermal
camera, see Figure 1. The registration of the cameras
was done manually by selecting corresponding points
and calculating a transformation between the images.
This is only an approximate solution, but sufficient for
our needs.
We recorded a large indoor dataset in our lab with
multiple persons moving in front of the camera. The
robot with the mounted camera was placed in differ-
ent locations so that different backgrounds are visi-
ble in the dataset. The dataset amounts to roughly
2500 images from each spectrum. Additionally, we
recorded data outdoors on two different days with
temperatures of 15
◦
C and 25
◦
C and sunny weather
conditions. During recording the robot was moving.
The outdoor datasets amount to 3500 images from
each spectrum. Figure 3 shows some examples of our
datasets.
5.1 Experiment Setup
For automatic evaluation of the detector results peo-
ple were manually annotated as bounding boxes in the
datasets. A result is counted as correct if the cut and
join of the detection rectangle and annotated rectangle
overlap by at least 50%.
We evaluate the Merge Features fusion, both pro-
posed mid level fusion variants and both decision level
fusion variants. As baseline algorithms we use the
Blob Detector and our ISM variant on thermal and
visible spectrum images, called ISM Visible and ISM
Thermal respectively. These baseline algorithms per-
form very different on the three datasets and their per-
formance issues help to understand the results of the
proposed fusion variants.
5.2 Evaluation
We present the results of the evaluation in three
graphs for the three different datasets. The graphs plot
recall rate (i.e. correct detections of people) against
the false positives per image (FPPI) rate while the de-
tection threshold is altered. We cut off the graphs at
one false positive per image. Our main goal with the
fusion of thermal and visible spectrum data was not to
raise the recall rate but to get less false positives, i.e.
make the individual curves stay at a higher recall rate
for lower FPPI rates.
From the indoor experiments, see Figure 4, we
learned that the Blob Detector yields very good re-
sults. But the other proposed methods are quite good
as well. All in all, the results on the indoor set are
quite similar for all the approaches and the set seems
EvaluationoftheFusionofVisibleandThermalImageDataforPeopleDetectionwithaTrainedPeopleDetector
349
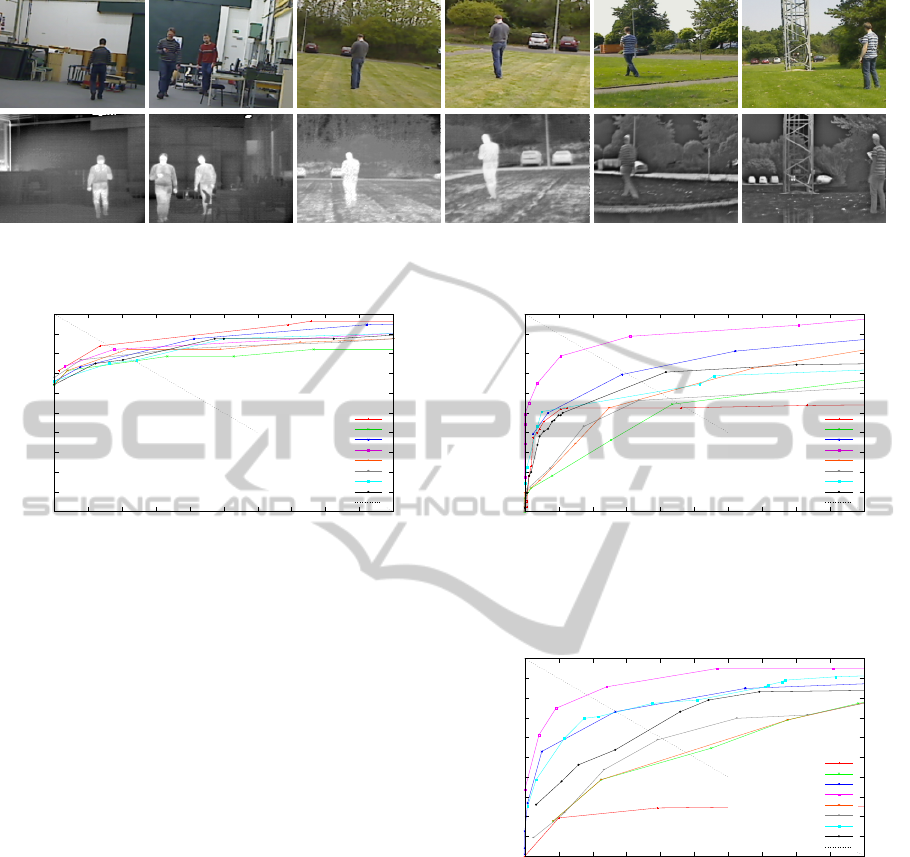
Figure 3: Sample images from the recorded datasets. The left two columns are from the indoor dataset, the middle columns
from the outdoor dataset on the 15
◦
C day and the right two columns from the outdoor dataset on the 25
◦
C day.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Recall
False Positives per Image
Blob detector
ISM visible
ISM thermal
Merge features
Maximum search
Vote for blobs
Join detections
Join with blobs
Equal error rate
Figure 4: Results on the indoor test set. Blob Detector
scores best, but all results are very similar.
to be easy enough. Nonetheless, we can see some
effects. ISM Visible performs worst in terms of the
recall rate, because it is affected by some background
structures like shelves and racks which it tends to con-
fuse with people. Those structures are less visible in
the thermal images, because they are of a homoge-
neous temperature which is why ISM Thermal per-
forms better. A look at the mid level fusion shows
that they raise the recall rate a bit above the level of
ISM Visible, because they prevent some of the false
positive detections that still occur with a low thresh-
old. This is what we wanted them to achieve. The
decision level fusion cannot avoid false positives very
good, which can be observed by the lower recall rates
in the range between 0 and 0.4 FPPI. Above 6 FPPI
the recall values of Join Detections are even higher
than the one of the Blob Detector, which stays stable
at 0.96 above 0.8 FPPI. But this are too many false
positives to make a useful detector. Maybe a more
advanced strategy to select the right detections from
the single detectors would help here, but this is left as
future work.
The outdoor experiments show a different picture
as seen in Figure 5 and 6. The performance of the
Blob Detector is not so good on the 15
◦
C day and
really bad on the 25
◦
C day, because there are many
things in the background that are heated up by the
sunlight. ISM Visible has severe issues with false pos-
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Recall
False Positives per Image
Blob detector
ISM visible
ISM thermal
Merge features
Maximum search
Vote for blobs
Join detections
Join with blobs
Equal error rate
Figure 5: Results on the outdoor dataset from the 15
◦
C day.
Merge Features performs best. Blob Detector performance
shows that the person now is not always warmer than the
background.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Recall
False Positives per Image
Blob detector
ISM visible
ISM thermal
Merge features
Maximum search
Vote for blobs
Join detections
Join with blobs
Equal error rate
Figure 6: Results on the outdoor dataset from the 25
◦
C day.
Merge Features performs best. Blob Detector performance
now is real bad.
itives. There are many structures like trees and lamp-
posts in the background that get confused with people.
The mid level fusion variants show that they achieve
our goal of reducing false positives. Their recall value
goes down at a lower FPPI rate, i.e. the range between
0 and 0.4 FPPI. Especially for Maximum Search on
the 15
◦
C day the recall rate raises quite fast compared
to ISM Visible, if one looks at 1.0 FPPI.
On the 25
◦
C day the performance difference be-
tween Maximum Search and ISM Visible is close to
non existent, though. On that dataset only Blob Vote
shows a little higher resistance against false positives,
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
350

Figure 7: The image shows a clearly visible thermal struc-
ture of a person which helps people detection, because more
features can be extracted on the person.
which is somewhat unexpected, because the Blob De-
tector itself performs extraordinarily bad. Most prob-
ably it detects some persons that ISM cannot see at
all. The performance of ISM Thermal is quite good
on these datasets. That is, because trees appear as
homogeneous blobs in thermal data and do not gener-
ate many features. This helps to avoid them as false
positives. Not surprisingly Join Detections seems to
mostly take the detections from the thermal data into
account and performs very similar. Join with Blobs
works quite well here, too. The results of the combi-
nation are far better than the individual results which
shows that Blob Detector and ISM Visible have very
few right positives in common.
On both outdoor datasets the low level merge of
features works best. This shows that the fusion of
thermal and visible data makes sense for outdoor sce-
narios, especially on days where the assumption that
people are the hottest spots in the images does not
hold. This is, because the feature set incorporates fea-
tures from both spectra. At the same time the ISM
detector is very good at handling incomplete infor-
mation, i.e. if one spectrum fails considerably, like
the visible spectrum does in our setup, the other spec-
trum still can be sufficient to produce good detections.
But the additional information from the visible spec-
trum seems to help the detector to even outperform
ISM Thermal on this datasets.
We identified two reasons for the improved per-
formance with thermal data. On the one hand, back-
ground clutter is often not as visible in thermal im-
ages as in images from the visible spectrum. That
is because background clutter often has a common
temperature which yields in big homogeneously col-
ored blobs which are easy to filter out. On the other
hand, the thermal signature of persons usually con-
tains much more structure than the clothing, see Fig-
ure 7 for an example. This helps the SURF feature
detector to extract more features for the observed per-
sons and, therefore, improves the results. The low
level fusion of data, i.e. merging of feature sets, works
very good with the ISM detector. We think that this is
because of the voting mechanism employed by ISM.
Features from both spectra are voting for the right
positives whereas for the false positives often only
features from one spectrum vote.
6 CONCLUSIONS AND FUTURE
WORK
We evaluated how to apply the ISM people detec-
tor to data from the thermal and visible spectrum at
the same time. We identified three levels of fusion
that are applicable for this detector. The lowest level
just combines features from thermal and visible spec-
trum images into a combined feature set and applies
the detector to this set. On a higher level we apply
ISM to the visible data and use the knowledge from
the thermal image to guide the voting process away
from false positives and towards possible persons but
still let the trained detector make the final decision.
On the highest level we apply the ISM detector to im-
ages from the thermal and visible spectrum separately
and try to join the results into a combined set of detec-
tions. These fusion techniques are evaluated on three
datasets, one recorded indoors in a lab environment
and two outdoor datasets on sunny days with ambient
temperatures of 15
◦
C and 25
◦
C.
The conclusion of our evaluation is that the low-
est level of fusion shows the best performance. It of-
fers a low false positive rate with a high recall rate at
the same time. The performance is much better than
the one of the ISM detector applied to visible images
only. It also is better than ISM applied to thermal
images only, which already yields a good improve-
ment. The other fusion approaches, namely Merge
Features, Maximum Search, Blob Vote, Join Detec-
tions, and Join with Blobs perform similar to ISM on
thermal data which suggests that the information in
the thermal data is very dominant during the detec-
tion process. One reason is that people are easily dis-
tinguishable from the background in thermal images
most of the time, because the background clutter in
the visible domain generally has homogeneous ther-
mal signature.
One aspect that was not investigated in this work
is the fusion of thermal and visible spectrum images
on the pixel level. It should be possible to design
a combined feature vector for that and implement a
smart feature detection method which avoids unlikely
features already in the feature detection step. In fu-
ture work we want to evaluate how the use of thermal
imaging impacts the performance of people tracking
and if persons can be distinguished using their ther-
mal signature.
EvaluationoftheFusionofVisibleandThermalImageDataforPeopleDetectionwithaTrainedPeopleDetector
351

REFERENCES
Bay, H., Ess, A., Tuytelaars, T., and Van Gool, L. (2008).
Surf: Speeded up robust features. Computer Vision
and Image Understanding (CVIU), Vol. 110:pp. 346–
359.
Cielniak, G. and Duckett, T. (2004). People recognition
by mobile robots. Journal of Intelligent and Fuzzy
Systems, 15:21–27.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In IEEE Conf. on Com-
puter Vision and Pattern Recognition (CVPR).
Davis, J. W. and Sharma, V. (2004). Robust background-
subtraction for person detection in thermal imagery.
In In IEEE Int. Wkshp. on Object Tracking and Clas-
sification Beyond the Visible Spectrum.
Enzweiler, M. and Gavrila, D. (2009). Monocular pedes-
trian detection: Survey and experiments. Pattern
Analysis and Machine Intelligence, IEEE Transac-
tions on, 31:2179–2195.
Gero andnimo, D., Lo andpez, A., Sappa, A., and Graf, T.
(2010). Survey of pedestrian detection for advanced
driver assistance systems. Pattern Analysis and Ma-
chine Intelligence, IEEE Transactions on, 32(7):1239
–1258.
Goubet, E. (2006). Pedestrian tracking using thermal in-
frared imaging. Proceedings of SPIE.
Han, J. and Bhanu, B. (2007). Fusion of color and infrared
video for moving human detection. Pattern Recogni-
tion, 40(6):1771 – 1784.
Ikemura, S. and Fujiyoshi, H. (2011). Real-time human
detection using relational depth similarity features.
In Kimmel, R., Klette, R., and Sugimoto, A., ed-
itors, Computer Vision ACCV 2010, volume 6495
of Lecture Notes in Computer Science, pages 25–38.
Springer Berlin Heidelberg.
K
¨
onigs, A. and Schulz, D. (2012). Evaluation of thermal
imaging for people detection in outdoor scenarios. In
IEEE International Workshop on Safety, Security &
Rescue Robotics (SSRR).
Lampert, C. H., Blaschko, M. B., and Hofmann, T. (2008).
Beyond sliding windows: Object localization by effi-
cient subwindow search. In IEEE Conf. on Computer
Vision and Pattern Recognition (CVPR).
Lehmann, A., Leibe, B., and van Gool, L. (2009). Feature-
centric efficient subwindow search. In IEEE Conf. on
Computer Vision (ICCV).
Lehmann, A., Leibe, B., and Van Gool, L. (2010). Fast
PRISM: Branch and bound hough transform for ob-
ject class detection. Int. Journal of Computer Vision
(IJCV), pages 1–23.
Leibe, B., Leonardis, A., and Schiele, B. (2008). Robust ob-
ject detection with interleaved categorization and seg-
mentation. Int. Journal of Computer Vision (IJCV),
Vol. 77:pp. 259–289.
Leibe, B., Seemann, E., and Schiele, B. (2005). Pedestrian
detection in crowded scenes. In IEEE Conf. on Com-
puter Vision and Pattern Recognition (CVPR).
Li, J., Gong, W., Li, W., and Liu, X. (2010). Robust pedes-
trian detection in thermal infrared imagery using the
wavelet transform. Infrared Physics and Technology,
53.
Lietz, H., Thomanek, J., Fardi, B., and Wanielik, G. (2009).
Improvement of the classifier performance of a pedes-
trian detection system by pixel-based data fusion. In
Serra, R. and Cucchiara, R., editors, AI*IA 2009:
Emergent Perspectives in Artificial Intelligence, vol-
ume 5883 of Lecture Notes in Computer Science,
pages 122–130. Springer Berlin Heidelberg.
Miezianko, R. and Pokrajac, D. (2008). People detection in
low resolution infrared videos. In Computer Vision
and Pattern Recognition Workshops, 2008. CVPRW
’08. IEEE Computer Society Conference on.
San-Biagio, M., Crocco, M., Cristani, M., Martelli, S., and
Murino, V. (2012). Low-level multimodal integration
on riemannian manifolds for automatic pedestrian de-
tection. In Information Fusion (FUSION), 2012 15th
International Conference on, pages 2223 –2229.
Schiele, B., Andriluka, M., Majer, N., Roth, S., and Wojek,
C. (2009). Visual people detection: Different models,
comparison and discussion. In ICRA Workshop People
Detection and Tracking.
Serrano-Cuerda, J., Lopez, M., and Fernandez-Caballero,
A. (2011). Robust human detection and tracking in in-
telligent environments by information fusion of color
and infrared video. In Int. Conf. on Intelligent Envi-
ronments.
Spinello, L. and Arras, K. (2012). Leveraging rgb-d data:
Adaptive fusion and domain adaptation for object de-
tection. In Robotics and Automation (ICRA), 2012
IEEE International Conference on, pages 4469 –4474.
Suzuki, S. and Abe, K. (1985). Topological structural anal-
ysis of digitized binary images by border following.
CVGIP.
Zhang, L., Wu, B., and Nevatia, R. (2007). Pedestrian de-
tection in infrared images based on local shape fea-
tures. In Computer Vision and Pattern Recognition,
2007. CVPR ’07. IEEE Conference on.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
352
