
Linear Software Models
Vector Spaces for Design Pattern Modules
Iaakov Exman
Software Engineering Dept., The Jerusalem College of Engineering, POB 3566, Jerusalem, 91035, Israel
Keywords: Linear Software Models, Vector Spaces, Modularity Matrix, Software Design Patterns, Pattern Modules,
Additivity.
Abstract: Software Design Patterns have an important role for software development and reuse within the object
oriented design paradigm. But the commonly used set of design patterns has remained arbitrary and lacking
a well-founded theoretical basis. This work offers algebraic Vector Spaces for software design patterns as a
theoretical framework based on Linear Software Models. It starts with modularity matrices of design
patterns made of software modules additively composed. The elements of the Vector Space are exactly the
pattern modules, upon which operates a direct sum operator. Design pattern modularity matrices are used to
extract typical modules, frequently used and often found in more than a single pattern. This leads to the
ultimate goal of sets of generic pattern modules serving as bases for the vector space. Design patterns and
larger sub-systems are additively built from the bases modules. Software design patterns’ case studies are
carefully analysed to demonstrate the approach.
1 INTRODUCTION
Software Design Patterns – see e.g. the well-known
GoF book (Gamma et al., 1995) – attained along the
years the status of a standard starting point to
approach software development problems. But since
their introduction there has not been a systematic
effort to give design patterns a theoretical basis.
They still are an ad hoc, more or less frequently
used, set of patterns.
This work offers the heretofore lacking
theoretical basis: Vector Spaces. We wish to obtain a
set of design pattern modules having properties of
necessity and sufficiency. To this end we base
ourselves on Linear Software Models. This work is
an application of these models to software Design
Patterns.
1.1 Linear Software Models
Linear Software Models were proposed as a theory
of software system composition from COTS
(Commercial Off-The-Shelf) components. Linear
Software Models, based on plain Linear Algebra, are
shortly reviewed here. For the detailed theory, please
see the original reference (Exman, 2012a), and
(Exman, 2012b).
In Linear Software Models, the architecture of a
software system is expressed by two kinds of basic
entities: structors and functionals.
Structors – which remind us of vectors – are
architectural units, from the structural viewpoint.
Structors generalize structural units to a diversity of
types (e.g. structs, classes, interfaces, aspects) and
collections (sets of classes, as design patterns).
Functionals are architectural system units from a
behavioral viewpoint. These are potential functions
that may be, but are not necessarily invoked.
Typically these are, Java methods, function families
(e.g. hyperbolic functions) or roles which define the
functionality of a design pattern (Riehle, 1996).
Modules are architectural units in a higher
hierarchical level of a system. Modules are
composed of grouped structors and their
corresponding functionals.
Linear models are usually formulated in terms of
matrices. The Modularity Matrix is a Boolean matrix
with columns standing for structors and rows for
functionals. A matrix element is 1-valued for a
functional-structor link and 0-valued for no link.
A central concept in Linear Software Models is
linear independence. Linear independence is the
formal algebraic equivalent to the informal software
engineering concept of uncoupling.
520
Exman I..
Linear Software Models - Vector Spaces for Design Pattern Modules.
DOI: 10.5220/0004496605200527
In Proceedings of the 8th International Joint Conference on Software Technologies (ICSOFT-PT-2013), pages 520-527
ISBN: 978-989-8565-68-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
A software structor is defined to be independent
of other structors in the system, if it provides a non-
empty proper sub-set of functionals of the system,
given by the links in the respective column, and is
linearly independent of other columns in the
Modularity Matrix. A similar statement is true for
independent functionals.
It has been demonstrated – see ref. (Exman,
2012) – that if all structors and all functionals of a
Modularity Matrix are respectively linearly
independent, the matrix is square. Moreover, if a
given functionals’ subset is disjoint to other subsets,
the matrix can be put in a block-diagonal form.
Therefore, if software design patterns are indeed
canonical building blocks for larger software
systems, we expect their Modularity Matrix to obey
the Linear Software Models. Thus, their modularity
matrices should be square and block-diagonal.
1.2 Mediator Modularity Matrix:
An Introductory Example
For design patterns the modularity matrix structor
columns refer to classes, while the matrix functional
rows refer to the respective class methods.
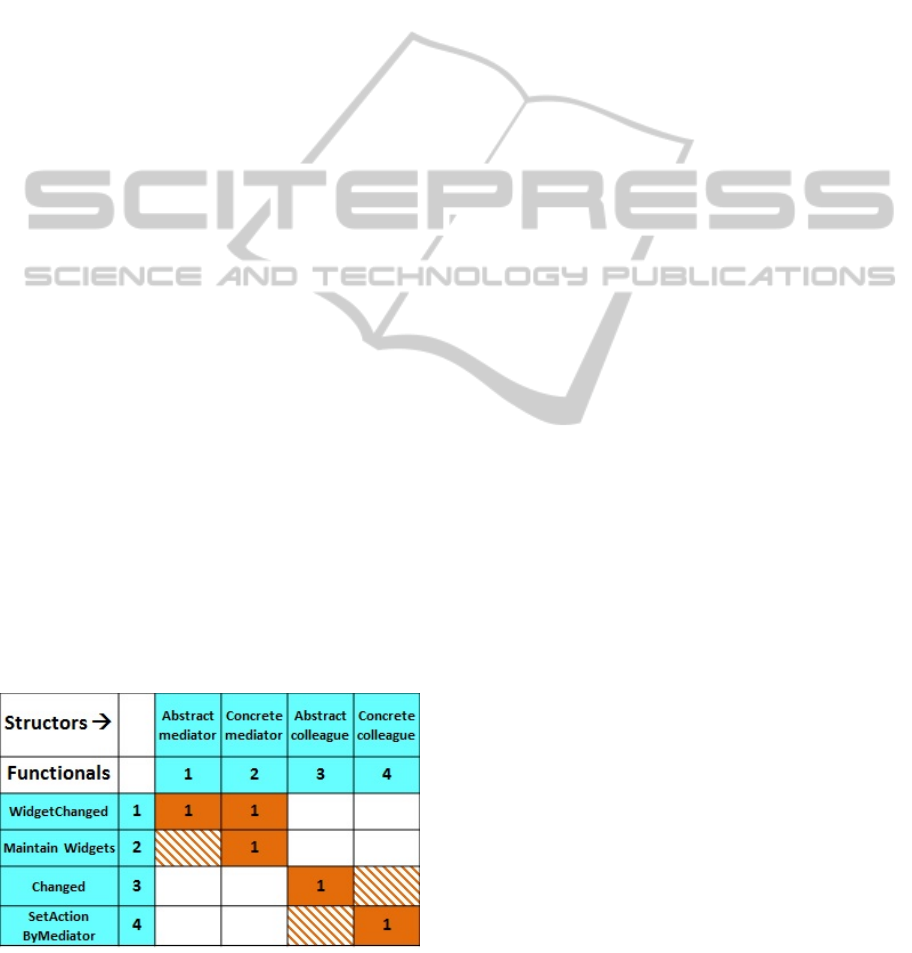
An example modularity matrix for the Mediator
design pattern is seen in Fig. 1. It contains the
generic pattern classes – Abstract and Concrete
mediator, Abstract and Concrete colleague. Here we
disregard any specific application classes.
The respective functionals – WidgetChanged,
Maintain Widgets, Changed and
SetActionByMediator – fit the list of participants
and sample code for the pattern in the GoF book
(Gamma et al., 1995). The functionals' names,
referring to Widget, hint to a GUI – graphical user
interface – application in the sample code.
The two diagonal blocks correspond to the
mediator module (upper-left) and to the colleague
Figure 1: Mediator Modularity Matrix – shows structor
columns and functional rows. Zero values are left blank,
while those within diagonal blocks are hashed.
module (lower-right). Even though one could have
several colleagues in the system only one is
represented in the matrix.
In Fig. 1 and all subsequent figures, 1-valued
matrix elements are explicit (orange colored), while
0-valued elements are omitted for simplicity. 0-
valued elements within blocks are hashed. 0-valued
elements outside blocks are left blank.
1.3 The Goal: Pattern Module Bases
for Vector Spaces
The goal of this work is a basis of design patterns in
which the different patterns are equally important
and cover the entire vector space of software design
patterns in a uniform way.
Design patterns not in the basis should be easily
expressed in term of one or more patterns belonging
to the basis.
Here we introduce the big idea: instead of
directly using design patterns in the basis, one
should use design pattern modules as the basis.
Different pattern modules are selected to be in
the vector space basis in order to not overlap in a
trivial way, i.e. they should be orthogonal.
The remaining of the paper is organized as
follows. Section 2 introduces vector spaces for
design pattern modules. Section 3 deals with the
choice of pattern modules for vector space bases.
Section 4 describes design pattern composition from
basis pattern modules. Section 5 concludes with a
discussion.
2 VECTOR SPACES FOR DESIGN
PATTERN MODULES
The aim of this section is to describe Vector Spaces
for design pattern modules. We propose here a three-
valued Vector Space.
2.1 Three-valued Vector Space
with Direct Sum
A vector space – see e.g. (Lang, 2002) – is defined
by a set of elements, together with two operations,
an addition and a multiplication by a scalar, obeying
a specified set of algebraic properties.
The elements in the set are square matrices – the
module sub-matrices of the modularity matrix –
defined for software design patterns as seen in the
introduction.
The addition operation is chosen to be the matrix
LinearSoftwareModels-VectorSpacesforDesignPatternModules
521

direct sum – see e.g. (Weisstein, 2006) – which
constructs a block diagonal matrix from a set of
square matrices. In general, for i=1,…,n square
matrices A
i
the direct sum is written
⊕
n
i=1
A
i
= diag(A
1
, A
2
, … , A
n
)
(1)
where ⊕ stands for direct sum, and diag means
block diagonal.
The choice of the matrix direct sum is motivated
by its ability to construct standard modularity
matrices from existing modules. Thus a modularity
matrix is viewed as a vector in terms of the defined
vector space.
The multiplication by a scalar operation is just
plain number multiplication, but the scalars in this
case are three-valued, i.e. only 1, 0 and -1. Three-
valued scalars imply respectively addition/no-
change/subtraction of given modules to/from a
modularity matrix.
The direct sum is easily shown to obey the
required associative and commutative properties.
The zero element and an inverse operation must be
defined and added to these properties.
The zero element for the direct sum, denoted by
(), the matrix with an empty set of elements, has
the property:
A
i
⊕ () = A
i
(2)
The inverse operation for the direct sum is the
matrix direct subtraction, denoted by ⊖,defined as:
Ai ⊖ Ai = () (3)
The meaning of the direct subtraction A
1
⊖ A
2
is a
binary operation used to remove the square matrix
A
2
(the second argument of the binary operator ⊖
from the preceding block diagonal matrix A
1
(the
first argument of the binary operator).
The multiplication by a scalar also obeys the
required simple properties, viz. distributive
regarding square matrices, distributive regarding the
scalar coefficient and associative regarding scalar
coefficients. The identity scalar coefficient has value
1.
Simple consequences of the above properties are:
0 * A
i
= ()
(4)
* () = ()
(5)
where A
i
is any square matrix and is any scalar
coefficient. Finally, with the same conventions, one
formally has
* A
i
= ⊖*A
i
meaning that multiplying by -1 is equivalent to the
creation of a 2
nd
argument of the matrix direct
subtraction. These formal properties are needed for
the complete characterization of the vector space.
3 A BASIS FOR THE PATTERN
MODULES VECTOR SPACE
In this section we propose a basis for the GoF
pattern modules vector space.
We first propose selection criteria. Then use the
criteria to make an actual basis proposal. Finally we
ask about the dimension of this basis.
3.1 Vector Space Basis Selection
Criteria
Based upon the design pattern statistics of usage, not
all patterns have equal importance. This seems to
imply that we should not expect that all the design
pattern modules will appear in the vector space
bases.
Thus, reasonable selection criteria for pattern
modules to appear in vector space bases should
include:
Relative usage – modules in widely used patterns
should be included, in contrast to scarcely used or
too specific patterns;
Role uniqueness – include pattern modules with a
unique role, do not include modules with similar
roles;
The overall idea is to attain a representative and
orthogonal basis set. Relative usage discards
irrelevant patterns. Role uniqueness contributes to
orthogonality.
If one looks for usage statistics of the GoF patterns,
one finds a significant variance. For instance in
reference (Shi and Olsson, 2006) a tool was applied
to recover pattern instances from several large
software packages written in the Java language.
Results show that in four software packages
certain patterns were very frequent (Mediator up to
500 instances, Bridge more than 100 instances,
Façade close to 100 instances), while other patterns
were not frequent (Abstract Factory around 30
instances, Strategy around 60 instances) and still
others totally negligible (Singleton, Template
Method, Visitor). This means that in terms of usage
frequency the proposed design patterns are very non-
uniform, in other words with very unequal relative
importance.
The GoF book itself – in the Guide to Readers –
proposes a selection of most common patterns,
which differs from the above results.
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
522
A truly representative statistics may not be easy
to obtain.
3.2 A Basis Set of Design Pattern
Modules
The Vector Space in this work is intended to cover
only Design Pattern modules. But, often these
modules are composed with classes of other
modules. These are either supplementary classes
needed for the design pattern execution – typically a
client – or just application classes.
Therefore, pattern modules can be classified as:
a- Essential – modules with an essential role
defining the design pattern;
b- Accessory – modules with an accessory role
needed to execute the design pattern.
We have analysed the GoF patterns to extract a basis
set for the Vector Space, according to the criteria in
the previous sub-section. The proposed basis set is
seen in Table 1.
Table 1 displays the chosen 16 essential modules
and their semantics.
A list of most common accessory modules in
GoF Design Patterns includes: Client, Target,
Abstraction, Implementor, Sub-system, Invoker,
Receiver, Originator, Context, Element, Class,
Expression and Aggregate. These can be seen to
have a quite generic character, not defining a
specific Design Pattern.
Table 1: GoF Pattern Modules Basis Set.
#
Module
Name
Module Semantics
1 Factory
Constructs instances of another class
2 Product
Class that may be repeatedly constructed
3 Director
Construction Recipe
4 Prototype
Construction Clone to be copied
5
Numbered
Factory
Factory with Predefined Instances’ number
6 Adapter
Interface converter into another interface,
7 Adaptee
Interface being converted
8 Component
Part from Hierarchy
9 Mediator
Unifying point of Abstraction
10 Colleague
End-point of Abstraction
11 Handler
Intermediate point of Abstraction
12 Subject
Unifying source of communication
13 Observer
End-point of communication
14 Strategy
Dynamic Alternative role
15 Command
Action that may be repeatedly invoked
16 State
State worth signalling by means of a class
An example of an essential module occurring in two
different design patterns is Numbered Factory. It
occurs in the Singleton pattern, with at most one
instance, and in the Flyweight Factory with maximal
instances number being application dependent.
3.3 Dimension of Pattern Module
Vector Spaces
An important issue concerning the Vector Space for
GoF design pattern modules is its dimension, in
other words what is the size of its bases. The
following Lemma aims at providing an upper bound
to the space dimension.
A proof sketch is as follows. An upper bound to the
space dimension is given by two conditions:
The number of essential pattern modules – this is a
small constant m that was proposed above to be
16 modules;
The number of accessory modules needed per
essential module – assumed to be k;
The sought dimension upper bound is D=m*k.
Is the assumption that k is a small constant
reasonable? By empirical observation, the maximal
overall number of classes in design pattern class
diagrams in the GoF book is of the order of ten.
Specifically, the Abstract Factory pattern has 10
classes and the Façade pattern has 15 classes.
4 ADDITIVE COMPOSITION
FROM BASIS MODULES
Here we describe case studies of design pattern
composition from basis modules. This also
illustrates the additive composition above the level
of individual patterns.
4.1 Single GoF Patterns
Frequently used behavioral design patterns include,
e.g. the Mediator and the Observer.
The Mediator pattern, shown in Fig. 1 is
represented in terms of the matrix direct sum, by the
following equation:
Lemma 1 – Dimension of Pattern Modules
Vector Space
Assuming that the number of the accessory
modules needed by each essential module is at
most a constant k, the dimension of the vector
space of GoF design pattern modules is finite
and bounded.
LinearSoftwareModels-VectorSpacesforDesignPatternModules
523
A
Mediator-Pattern
= A
mediator
⊕ A
colleague
(7)
This equation makes explicit that the block diagonal
modularity matrix of the Mediator pattern is
composed of a mediator module and a colleague
module, by means of the matrix direct sum. The
equation also reflects the intuition that modules in
Linear Software Modules are additively composed.
The order of the modules in equation (7) is
arbitrary. This arbitrariness is a consequence of the
way of computation of diagonality, i.e. only the
distance of a module matrix element from the
diagonal is important, not its specific position. It
does not matter whether the mediator module is the
upper-left block and the colleague is the lower-right
block in the matrix or vice-versa.
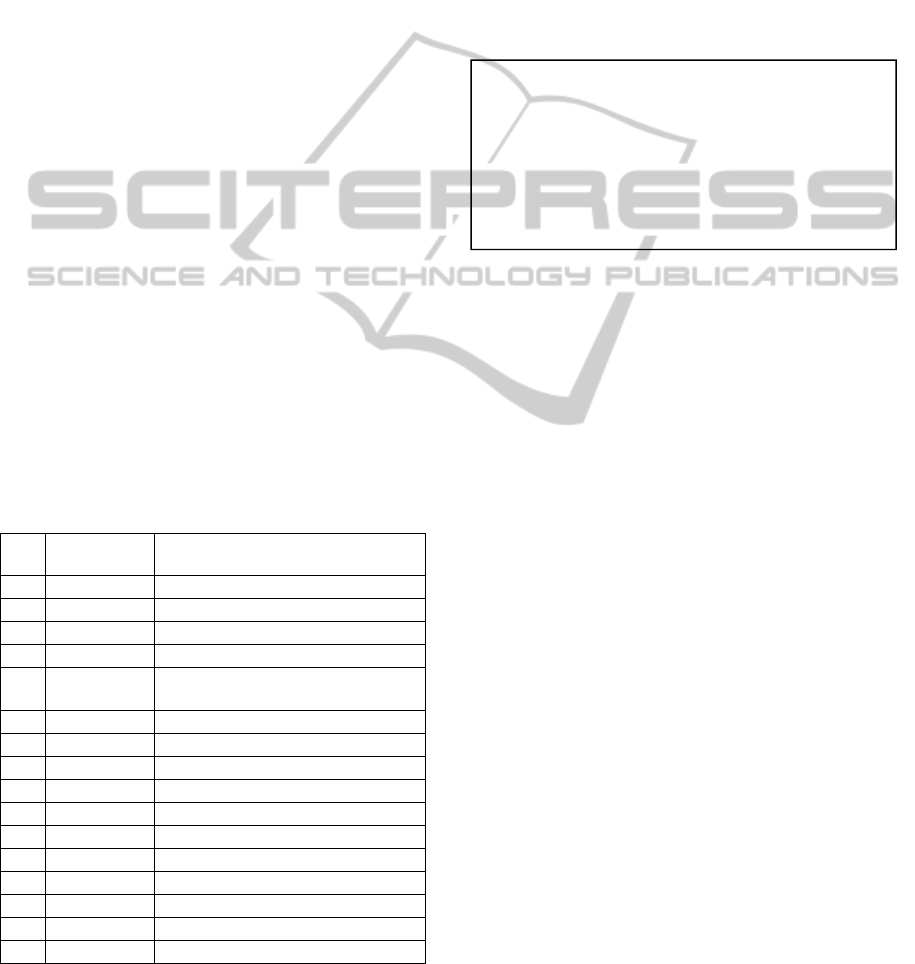
Figure 2: Observer Modularity Matrix – the same
conventions used in Fig.1 and in all subsequent figures
containing modularity matrices for a given pattern.
Thus, although the matrix direct sum in general is
not commutative, for the particular case of module
composition we use a commutative version and
therefore it is a true vector space.
For details about the choice of functionals in the
Observer pattern see ref. (Exman, 2012). The
Observer pattern, shown in Fig. 2 is represented
similarly, by the following equation:
A
Observer-Pattern
= A
subject
⊕ A
observer
(8)
4.2 Pairs of Patterns
The first example of composition of a couple of
design patterns is found in the GoF book (Gamma et
al., 1995) itself, viz Observer and Mediator.
The original purpose of this composition is to
encapsulate in the mediator a complex graph of
dependencies – a DAG, Directed Acyclic Graph – of
large numbers of observer instances possibly
connected to more than a single subject.
The Observer-Mediator composition of patterns
is represented in terms of the matrix direct sum of
modules, by the following equation:
A
Obs-Med-Composition
= A
subject
⊕ A
mediator
⊕ A
observer
(9)
The direct sum terms are in the same order as the
modules in the modularity matrix shown in Fig. 3.
Note that the composition does not include the
colleague module, since this is the role of the subject
and the observer in this composition.
The composition clear additivity justifies well
the choice of the direct sum as the operation of the
Vector Space.
Figure 3: Observer-Mediator Composed Modularity
Matrix – the mediator is the central module between the
upper-left subject and the bottom-right observer.
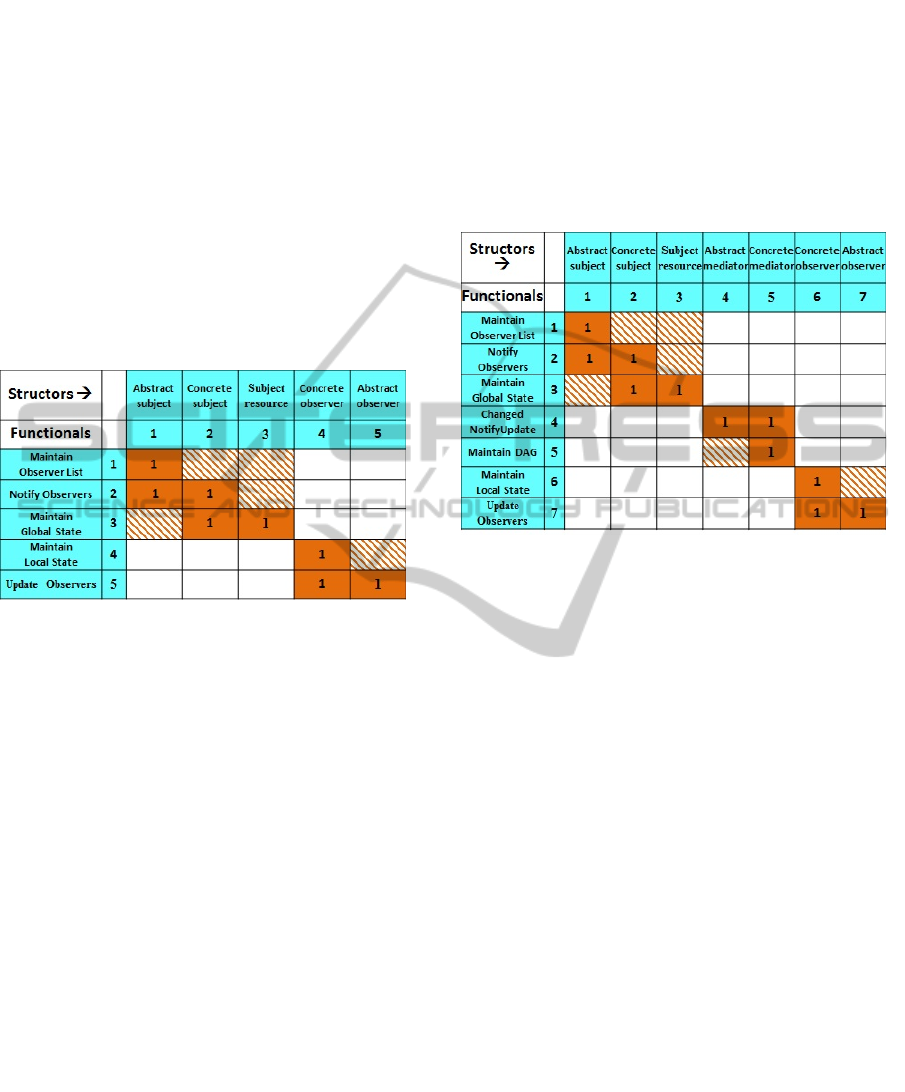
4.3 Triplets of Patterns
The next example adds to the previous composition
the Singleton pattern – also suggested in the GoF
book – since it is reasonable to expect the Mediator
to behave as a Singleton for this kind of system.
Here we do not use fully expanded modules as in
Fig 3, since their classes are already known. We
collapse each of the Observer-Mediator modules
into upper level black-boxes leaving one matrix
element per module, as seen in Fig. 4. The resulting
modularity matrix is strictly diagonal.
The added Singleton pattern is a special case
containing just one class. Thus, its expanded and
collapsed square matrices coincide.
The Observer-Mediator-Singleton composition
of patterns is represented by the following equation:
A
Obs-Med-Singlet
= A
subject
⊕ A
mediator
⊕ A
singleton
⊕ A
observer
(10)
The modules’ order in this equation is the same as in
the matrix in Fig. 4. The Singleton module is close
to the Mediator since its purpose is to add the single
instance property to the Mediator module.
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
524
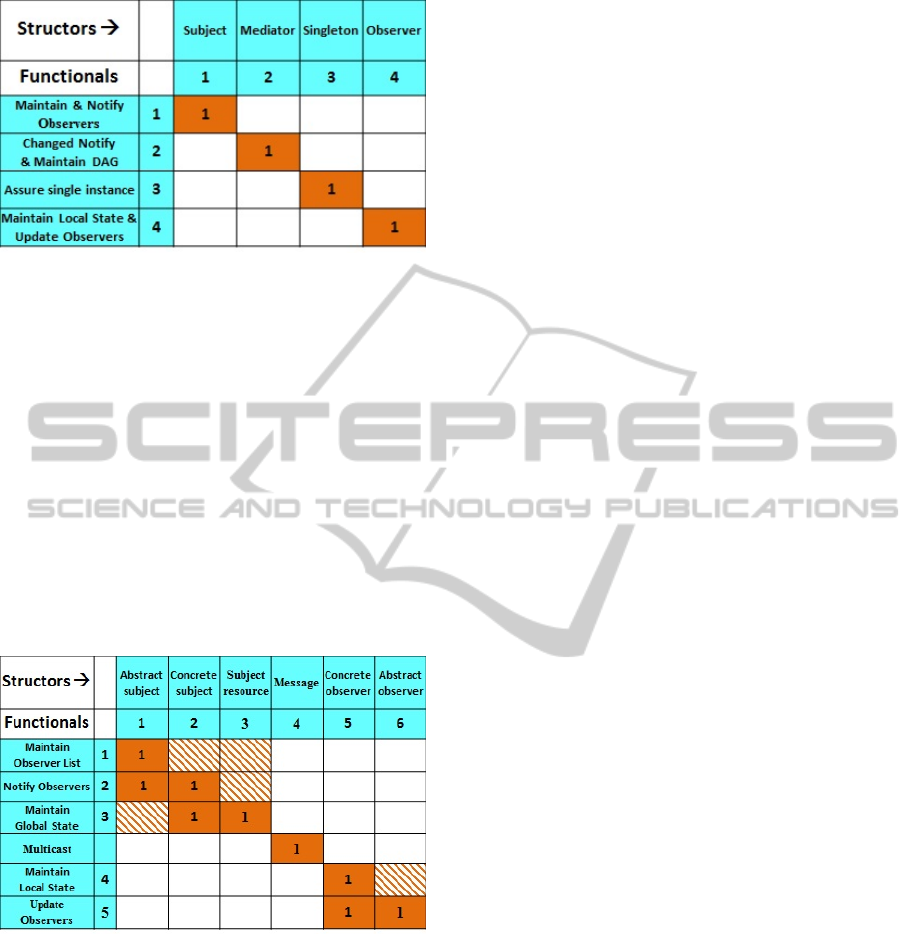
Figure 4: Observer-Mediator-Singleton Modularity Matrix
– this is a strictly diagonal matrix, as each module is
collapsed into an upper-level black-box. Expanded white-
boxes would recover classes with additional 1-values per
module as seen in Fig. 3.
4.4 Expressing Any Pattern in Terms
of Basis Modules
The current example shows how to derive one
pattern from another one. In particular we obtain the
Multicast (Vlissides, 1997) pattern from the
Observer pattern.
The derivation implies that Observer modules are
in the basis of GoF pattern modules. On the other
hand the Multicast pattern is viewed as a derived
pattern.
Figure 5: Multicast derived pattern Modularity Matrix –
this pattern is derived from the Observer pattern modules,
with the addition of the Message module.
We disregard the renaming issues – say attach
instead of register – and other specific structural
differences, as long as the pattern desired behavior is
attained.
The essential difference between the Multicast
and the Observer is the additional module with a
Message class. This enables more specific
characterization of message instances as deemed
necessary.
It should be clear that the Message module is an
accessory module, in the sense of sub-section 3.2.
This is justifiable since messages are ubiquitous in
software systems. Whether the Message is part of
another pattern and not just an independent module,
is a decision that could be taken, but is out of the
scope of this paper.
The Multicast pattern in terms of the Observer
pattern modules is represented by the following
equation:
A
Multicast
= A
subject
⊕ A
message
⊕ A
observer
(12)
The Multicast derived pattern modularity matrix is
seen in Fig. 5.
4.5 Multi-pattern Composition
The above examples give a flavour of pattern
composition by means of the direct sum operator in
the Vector Space. They also clarify the potential
meaning of bases for this kind of vector space.
Additional multi-pattern composition can be
done in similar ways.
Nonetheless, it should be clarified that such
matrices are only relevant for cases of actual
interaction among the respective design patterns.
Design patterns may occur in disjoint parts of
large systems. In such cases there is no sense in
depicting them in a common modularity matrix
independent of the other modules of the large
system.
5 DISCUSSION
5.1 Vector Spaces
Vector spaces have linear independence as a
fundamental concept. This is a formal concept
corresponding to the informal notion of decoupling
in Software Engineering. Therefore, vector spaces
are perfectly suitable to deal with design patterns,
where decoupling is a main purpose.
The matrix direct sum operation is neatly defined
and suitable for additive pattern composition. Some
minor additions and modifications needed for this
operation were introduced, such as the inverse
operation matrix direct subtraction.
The vector space is the central algebraic structure
proposed in this work as a theoretical base for GoF
design pattern modules.
The issue of bases for this vector space was dealt
with. Lemma 1 stated that the vector space is finite
and bounded. On the other hand, no specific sizes or
LinearSoftwareModels-VectorSpacesforDesignPatternModules
525

very tight bounds for the vector space size were
offered yet.
Modules are preferable to whole patterns as the
bases elements, since various modules appear as
common units in several patterns, obtaining a
desirable uniformity at the module level. This
uniformity facilitates understanding and additive
usability of pattern composition.
5.2 Related Work
Patterns were first proposed by Beck and
Cunningham – see ref. (Beck and Cunningham,
1987).
After the publication of the GoF design patterns,
many other compilations of design patterns
appeared, some of them specialized for specific
purposes, among them for Networks (Buschmann et
al., 1996) and J2EE (Alur et al., 2003).
Different formal approaches were proposed to
deal theoretically with design patterns. To our best
knowledge none of them pursues an algebraic
structure approach similar to ours.
Mikkonen (Mikkonen, 1998) used high-level
abstractions of communications combined with a
Temporal Logic of actions.
Yehudai and collaborators (Eden et al., 1998,
1999) proposed LePUS a system based on predicate
logic, also displaying a readable diagrammatic
representation.
Cechich and Moore (Cechich and Moore, 1999)
use RSL a specification language to formally decide
whether a given design conforms to an intended
design pattern.
Wang and Huang (Wang and Huang, 2008) use
RTPA – real-time process algebra – as a
specification of design patterns. Despite the
algebraic name, it is a formal language oriented
approach.
Most of these approaches solve particular
problems. Our approach is generic, and displays the
power and clarity of an algebraic structure.
5.3 Future Work
The Three-valued Vector Space can certainly be
extended to more general spaces, say real vector
spaces. This will allow, among other possibilities,
consistent treatment of expanded and collapsed
modules in equal foot.
For instance, in ref. (Exman, 2012) collapsed
modules were marked with the trace and diagonality
integers – instead of just Boolean values – to provide
information about the underlying collapsed modules
and to enable their recovery.
The current Linear Software Model and its
vector space may possibly be refined to deal not
only with functionals, but also in a finer scale with
attributes.
5.4 Main Contribution
The main contribution of this paper is the use of
Vector Spaces as a formal tool for analysis of GoF
Design Patterns, based upon Linear Software
Models, a generic theoretical framework for
software composition.
Its practical application is additive composition
of software sub-systems, design patterns and
upwards, from the basis modules.
REFERENCES
Alur, D., Crupi, J., and Malks, D., 2003. Core J2EE
Patterns: Best Practices and Design Strategies, 2
nd
edition, Prentice-Hall, Upper Saddle River, NJ, USA.
Beck, K. and Cunningham, W., 1987. “Using Pattern
Languages for Object-Oriented Programs”, in
OOPSLA-87 Workshop on the Specification and
Design for Object-Oriented Programming.
Borndorfer, R., Ferreira, C.E., and Martin, A., 1998.
“Decomposing Matrices into Blocks”, SIAM J.
Optimization, Vol. 9, Issue 1, pp. 236-269.
Buschmann, F., Meunier, R., Rohnert, H., Sommerlad, P.,
and Stal, M., 1996. Pattern-Oriented Software
Architecture - A System of Patterns. Wiley and Sons.
Cechich, A., and Moore, R., 1999. “A Formal Basis for
Object-Oriented Patterns”, in Proc. 6
th
APSEC Asia
Pacific Software Engineering Conf., pp. 284-291.
Eden, A. H., Gil, J., Hirshfeld, Y. and A. Yehudai, 1999.
“Towards a Mathematical Foundation for Design
Patterns”, Tel-Aviv University, Technical Report,
1999
Eden, A.H., Hirshfeld, Y. and A. Yehudai, 1998.
“Multicast - Observer ≠ Typed Message”. C++
Report, SIGS Publications.
Exman, I., 2012. “Linear Software Models for Well-
Composed Systems”, in S. Hammoudi, M. van
Sinderen and J. Cordeiro (eds.), Proc. 7
th
ICSOFT’2012 Conference, pp. 92-101, Rome, Italy.
Exman, I., November 2012. “Linear Software Models”,
Extended Abstract, in Ivar Jacobson, Michael
Goedicke and Pontus Johnson (eds.), Proc. GTSE
2012, SEMAT Workshop on a General Theory of
Software Engineering, pp. 23-24, KTH Royal Institute
of Technology, Stockholm, Sweden.
http://semat.org/wp-content/uploads/2012/10/GTSE_
2012_Proceedings.pdf. See also video presentation:
http://www.youtube.com/watch?v=EJfzArH8-ls
Gamma, E., Helm, R., Johnson, R., and Vlissides, J.,
1995. Design Patterns: Elements of Reusable Object-
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
526

Oriented Software, Addison-Wesley, Boston, MA,
USA.
Lang, S., 2002. Algebra, Springer Verlag, 3
rd
edition, New
York, USA.
Mikkonen, T., 1998. “Formalizing Design Patterns”, in
Proc. ICSE’98, pp. 115-124, IEEE Computer Society
Press.
Mitchell, B. S., and Mancoridis, S., 2006. “On the
Automatic Modularization of Software Systems Using
the Bunch Tool”, IEEE Trans. Software Engineering,
Vol. 32, pp. 193-208, (3).
Riehle, D., 1996. “Describing and Composing Patterns
Using Role Diagrams”, in K-U. Mutzel & H-P. Frei.
(eds.) Proc. Ubilab Conf., Universitatsverlag
Konstanz, pp. 137-152.
Shi, N., and Olsson, R.A., 2006. “Reverse Engineering of
Design Patterns from Java Source Code”, in Proc.
ASE’06 21
st
Int. Conf. Automated Software
Engineering, pp. 123-134.
Vlissides, J., 1997. “Multicast”. C++ Report, Sep. 97.
SIGS Publications.
Wang, Y., and Huang, J., 2008. “Formal Modeling and
Specification of Design Patterns using RTPA”, Int. J.
Cognitive Informatics and Nat. Intelligence, vol. 2, pp.
100-111, 2008.
Weisstein, E. W., 2006. "Matrix Direct Sum" from
MathWorld – a Wolfram Web Resource.
http://mathworld.wolfram.com/MatrixDirectSum.html.
LinearSoftwareModels-VectorSpacesforDesignPatternModules
527
