
Air Defense Threat Evaluation using Fuzzy Bayesian Classifier
Wei Mei
Dept. of Electronic Engr., Shijiazhuang Mech. Engr. College, 97 Hepingxilu Rd., Shijiazhuang, P.R. China
Keywords: Fuzzy Systems, Bayesian, Conditional Probability, Likelihood, Threat Evaluation.
Abstract: The connection between probability and fuzzy sets has been investigated among the community of
approximate reasoning for decades. A typical viewpoint is that the grade of membership could be
interpreted as a conditional probability. This note extend this viewpoint a step further by introducing the
concepts of conditional probability mass function (CPMF) and the likelihood mass function (LMF). We
draw the conclusion that conditional probability can be used for describing either randomness or fuzziness
depending on how it is interpreted. If expanded to CPMF, then it can be used for modelling randomness; if
expanded to LMF, then it can be a useful expression for modelling fuzziness. A fuzzy Bayesian theorem is
derived based on the fuzziness interpretation of conditional probability. Its successful application to an
example of target recognition demonstrates that the proposed fuzzy Bayesian theorem provides alternative
approach for handling uncertainty.
1 INTRODUCTION
The operation of air defense is a time critical
process, which includes a series of automation/semi-
automation steps of information fusion and the final
step of engagement. The process of information
fusion may range from target tracking, target
recognition, through to situation awareness, threat
evaluation (TE) and weapon assignment. According
to Paradis (Paradis et al., 2005), TE refers to “the
part of threat analysis concerned with the ongoing
process of determining if an entity intends to inflict
evil, injury, or damage to the defending forces and
its interests, along with the ranking of such entities
according to the level of threat they pose.” The
difficulties of developing a TE system are evident,
largely due to three factors (Roux and Vuuren, 2007;
Steinberg, 2005): 1) Weak spatio-temporal
constraints on relevant evidence. Many TE problems
may involve evidence that is wide-spread in space
and time, with no easily defined constraints. 2)
Weak ontological constraints on relevant evidence.
Evidence relevant to TE may be very diverse and
may contribute to inferences in unexpected ways. 3)
Weakly-modeled causality. TE involves inference of
human intent and behavior. Models are extremely
difficult to formulate, since sub-domains (individual
minds) are unique and attributes may be very
difficult to measure or even define.
The fundamental problem involved in
information fusion of air defense is the need to deal
with uncertainty. In the words of Von Clausewitz
(Clausewitz et al., 2004), “war is the realm of
uncertainty; three quarters of the factors on which
action in war is based are wrapped in a fog of greater
or lesser uncertainty. A sensitive and discriminating
judgment is called for a skilled intelligence to scent
out the truth.” Up to now, a huge number of
methods, such as Bayesian inference (Chen and Ho,
2008; Lane et al., 2010), fuzzy sets (Bailadora and
Triviño, 2010; Xu et al., 2012), neural networks (Jan,
2004; Young et al., 1997), and evidential reasoning
(Delmotte and Smets, 2004; Leung and Wu, 2000),
have been promoted for handling uncertainty arising
from applications of information fusion including
TE. Though there are a variety of approaches as
listed above for uncertainty inference, in our opinion
the uncertainty involved in and of itself can be
broadly categorized into (or interpreted as) two
types, randomness and fuzziness. Randomness is
usually measured by probability whereas fuzziness
is often gauged by membership or possibility. It is
worth noting that there is ongoing endeavor of
connecting probability and possibility. Some works
intend to unify them or interpret one uncertainty by
another one (Cheeseman, 1988; Coletti and
Scozzafava, 2004; Dubois et al., 1997), some works
try to find out the relationship for probability-
possibility transformation (Oussalah, 2000; Dubois
et al., 2004; Mouchaweh and Billaudel, 2006).
227
Mei W..
Air Defense Threat Evaluation using Fuzzy Bayesian Classifier.
DOI: 10.5220/0004512602270232
In Proceedings of the 5th International Joint Conference on Computational Intelligence (FCTA-2013), pages 227-232
ISBN: 978-989-8565-77-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

This paper discusses the Bayes based TE
method. Bayesian inference is an approach to
statistics in which all forms of uncertainty are
expressed in terms of probability. It has a large body
of applications and is believed to be the most classic,
rigorous and popular method for modeling
uncertainty (Jain et al., 2000). Nevertheless,
Bayesian method has always been criticized for lack
of prior probability and being difficult to define the
conditional probability. From the viewpoint of
application, e.g. target recognition and TE, it is
usually very inconvenient to build and maintain the
knowledge database of the inference rule in form of
conditional probability. Practitioners complain that
whenever new inference rule is to be added to the
knowledge database, all former defined inference
rules have to be redefined to ensure the sum of
corresponding conditional probabilities maintains
one. We in this paper try to eliminate this problem
by reinterpretation of the Bayes theorem, which can
handle randomness and fuzziness simultaneously,
and leads to an open structure of knowledge
database for uncertainty inference.
The rest of this paper is organized as follows.
Section 2 presents two interpretations of conditional
probability, which are suitable for describing
randomness and fuzziness, respectively. Section 3
revisits the well known Bayesian theorem by
applying these two interpretations of conditional
probability and derives two forms of Bayesian
theorem, the usual one and the fuzzy Bayesian
theorem. Section 4 proposes a probability-possibility
conversion method through the bridge of Bayesian
theorem but with specific interpretations of
conditional probability. Section 5 introduce the
application of the fuzzy Bayesian theorem to the
problem of TE. Section 6 concludes the paper.
2 TWO INTERPRETATIONS
OF CONDITIONAL
PROBABILITY
The Bayesian theorem is a well-known mechanism
for relating two conditional probabilities. This
section gives two interpretations of conditional
probability, based on which the Bayesian theorem
can be reinterpreted as in the next section.
Probability originally comes with randomness while
possibility comes with fuzziness. Randomness is the
uncertainty whether an event occurs, or the possible
outcomes an event variable may take. Sometimes,
the event itself is certain and you may be uncertain
about it because of your lack of information of it.
Fuzziness is the uncertainty whether a concept holds
given its attribute values.
The chief similarity between probability and
possibility is that both methods describe uncertainty
with numbers in the unit interval [0, 1]. The key
distinction concerns how they deal simultaneously
with the outcome and its opposite of an event
variable. Probability demands the sum of all possible
outcomes of an event variable is one. Possibility has
no additivity constraint as probability.
Mathematically, a possibility on the finite set A is a
mapping to [0, 1] such that
() 0
(1)
( ) Max( ( )) 1, 1, 2,...,
i
AAain
(2)
where A is called event variable, and
i
Aa
is one
of n possible outcomes of event variable A (in short,
event). Without lose of generality, this work only
considers the case of discrete event to simplify the
discussion. As we can see, possibility is similar to
probability, but it relies on an axiom which only
involves the operation “maximality” as shown in (2).
In contrast, probability is additive which requires
that probability sum of all possible outcomes of
event variable is one. Though probability origins
from randomness or frequency, it has been widely
used in various applications for modeling different
uncertainty that satisfies the additively constraint of
probability. Likewise, possibility has been
extensively used for formulating any uncertainty that
satisfies (1, 2) besides fuzziness.
Conditional probability
(|)
ij
pA a B b
is the
occurrence probability of a conditional event
|
ij
A
aB b
, which equals to the probability of
i
Aa
given
j
B
b
. In order to completely
formulate the randomness of the conditional event
|
ij
A
aB b
, we need to use conditional
probability mass function (CPMF),
{(
i
pA a
|),
j
B
b
1, 2,..., }im
(in short,
(| )
j
pAB b
).
Here event variable B is fixed at
j
b
and m is the
number of possible outcomes
i
a
s of event variable
A. Now we see CPMF provides a complete
description of the stochastics of the event variable A
given conditioning event
j
B
b
. According to the
property of probability, the sum of
(| )
j
pAB b
across
i
a
is one. The randomness formulated by
CPMF is here called probabilistic randomness.
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
228

If event variable A is fixed at
i
a
and let B take
value from n possible outcomes
j
b
s
,
we then get the
likelihood mass function (LMF),
{(
i
pA a
|),
j
B
b
1, 2,..., }
j
n
(in short,
(|)
i
pA a B
),
which is the likelihoods of the fixed
i
a
stemming
from different
j
b
. Note that though
(
i
pA a
|)
j
B
b
is a probability, there is no need that the
sum of
(|)
i
pA a B
across
j
b
should be one since
it is actually not a probability mass function. Let
A
i
a
be a fuzzy concept, then
(|)
i
pA a B
naturally defines a membership function
() ( | )
i
Aa i
B
pA a B
(3)
As we can see from (3), LMF is a natural form of
membership function for describing fuzziness. The
only constraints on
(|)
i
p
AaB
is that its sum over
i
a
should be one for every
j
B
b
. The fuzziness
formulated by (3) is here called probabilistic
fuzziness since it is derived from a conditional
probability, and
()
i
Aa
B
is called probabilistic
membership function. If we let
()
i
Aa
B
0
(|)
i
pA a B
, where scale factor
0
is applied
so that the maximum value of
()
i
Aa
B
over B is
one, then
()
i
Aa
B
is a standard membership
function derived from conditional probability.
3 REITERPRETAION
OF BAYESIAN THEOREM
The well-known Bayesian theorem is as follow:
1
()( | )
(|)
()
()( | )
iji
ij
j
iji
pA a pB b A a
pA a B b
pB b
pA a pB b A a
(4)
where
(|)
ij
p
AaBb
, the posterior, is the
probability in
A
i
a
after
j
B
b
is observed;
()
i
pA a
is prior probability; conditional
probability
(|)
ji
p
BbAa
, is called the likelihood;
and
1
is a normalizing factor such that the sum of
(|)
ij
p
AaBb
over
i
a
is one.
In applications, the likelihood
(
j
p
Bb
|)
i
A
a
is
usually defined among the space of CPMF,
(| )
i
pB A a
, which means
(|)
j
i
pB b A a
represents randomness. Following the interpretation
of conditional probability in Section 2,
(
j
pB b
|)
i
Aa
can also be used to model fuzziness, only
if it is defined among the space of LMF,
(|)
j
pB b A
. Let
0
() ( | )
j
Bb j
A
pB b A
, we
then have
2
(| ) () ()
j
jBb
pAB b pA A
(5)
Note that (5) holds for any
()
j
Bb
A
proportional to
(|)
j
pB b A
considering the effect of the
normalization constant
2
. Eq. (5) provides a
mechanism to fusion randomness and fuzziness to
arrive at a conclusion with uncertainty of
randomness, and is called a fuzzy Bayesian theorem.
Recall that probability and possibility can be used
for modelling any uncertainty only if their specific
constraints are satisfied. Mathematically, Eq. (5)
could be used to fusion probability and possibility
no matter fuzziness is involved or not, but the name
of fuzzy Bayesian theorem always holds. The
choosing of (4) and (5) for a certain application
depends on our interpretation of
(
j
pB b
|)
i
Aa
.
4 PROBABILITY-POSSIBILITY
TRANSFORMATIONS
Similarly, following different interpretations of
conditional probability, we can derive
transformations from possibility to probability and
conversely. Let
(
j
pB b
|)
i
Aa
in (4) be
expanded to LMF and represent possibility, i.e.,
0
() ( | )
j
Bb j
A
pB b A
, we get
3
(| ) () ()
j
jBb
pAB b pA A
(6)
where
3
is a normalizing factor. Eq. (6) can be
used for transformation from possibility to
probability and is similar to Klir’s normalized
transformation from possibility to probability
(Mouchaweh and Billaudel, 2006). The difference
lies that in order to convert a possibility to a more
specific probability, (6) suggests that the prior
probability
()
i
pA a
should be used. Let
()
i
pA a
be a uniform distribution, then we have
AirDefenseThreatEvaluationusingFuzzyBayesianClassifier
229
(| )
j
pAB b
4
()
j
Bb
A
(7)
where
4
is a normalizing factor. Eq. (7) is exactly
the same as Klir’s normalized transformation from
possibility to probability.
Let
(|)
j
i
pB b A a
in (4) be expanded to
CPMF
(| )
i
pB A a
and represent probability, we
get
5
(| )
()
()
i
i
Aa
pB A a
B
pB
(8)
where
0
() ( | )
i
Aa i
B
pA a B
is expanded to
LMF and represents possibility; scale factor
5
is
such that the maximum value of
()
i
A
aj
B
b
over
j
b
is one. Note that
()
i
pA a
is removed from (8),
which is a constant as
A
is fixed at
i
a
, considering
the effect of the factor
5
. Eq. (8) can be used for
transformation from probability to possibility and is
also similar to Klir’s normalized transformation
from probability to possibility (Mouchaweh and
Billaudel, 2006).
5 APPLICATION TO THREAT
EVALUATION
Factors considered in assessing target threat under
the background of air defense may include target
type, heading, velocity, altitude, distance with
respect to the related high value defended assets, the
detection of emissions from its fire control radar,
and the estimation of its possible courses of attack
action (Roux and Vuuren, 2007). In addition, peer
supplied TE report may be used for own-ship TE
update. The TE example introduced in this section
considers two factors, i.e., target type and target
distance.
Assume a missile approaching the defended
assets belongs to two possible types of target,
combat aircraft and missile denoted by
12
{, }Ccc
.
Target distance is supposed to be classified as three
levels, close (<20km), medium (<100km & >20km),
far (e.g., >100km), denoted by
123
{, , }
D
ddd
. Let
target threat be three levels, low, medium and high,
denoted by
123
{, , }Tttt
. At consequent times
1
k
,
2
k
,
3
k
, the TE system receives target type
probability
(|)
i
pc e
(e is the raw observation) given
in Table 1 from a classifier, and target distance data
given in Table 2 from a tracker. Note that in Table 2,
e.g., at time
1
k
, p(d
2
|e) = 1 while p(d
1
|e) = p(d
3
|e) =
0, which is due to the fact that current target distance
is medium (d
2
).
Table 1: Target type probability.
k
1
k
2
k
3
p(c
1
|e)
0.5 0.2 0.2
p(c
2
|e)
0.5 0.8 0.8
Table 2: Target distance.
k
1
k
2
k
3
Distance
90km (medium) 50km (medium) 18km (close)
p(d
1
|e)
0 0 1
p(d
2
|e)
1 1 0
p(d
3
|e)
0 0 0
The threat level of the approaching missile is
evaluated by using a classifier based on the Bayesian
theorem or the fuzzy Bayesian theorem. The
posterior probability of target threat could be
calculated as follows:
(|) (| , )( |)( |)
js
iijsjs
cd
p
te ptcdpc epd e
(9)
(| , ) ()( |)( |)
ijs i ji si
pt c d pt pc t pd t
(10)
where
()
i
pt
is the prior probability of target threat
with assumed uniform distribution; conditional
probabilities
(|)
j
i
pc t
,
(|)
s
i
pd t
define the
uncertain mapping between the threat category space
and the threat factor space; and
is a normalization
constant such that values of
(| , )
ijs
pt c d
over
i
t
sum to one. Traditionally,
(|)
j
i
pc t
,
(|)
s
i
pd t
are
usually defined from the threat category space to the
threat factor space as in Table 3, meantime Eqs. (9,
10) is called the Bayesian classifier. Always,
practitioners are hesitated in assigning an
appropriate value for
(|)
j
i
pc t
or
(|)
s
i
pd t
. It
looks somewhat strange, e.g., that a certain level of
threat will produce a certain type of target with a
certain probability. In contrast, it is more reasonable
to say that a certain type of target will exhibit a
certain level of threat with a certain possibility.
Therefore
(|)
j
i
pc t
,
(|)
s
i
pd t
need to be defined
from the threat factor space to the threat category
space as in Table 4, meantime a fuzzy Bayesian
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
230
classifier (9, 11) can be applied with (11) given
bellow, where
(|)
j
i
pc t
,
(|)
s
i
pd t
are rewritten as
()
j
ci
t
,
()
s
di
t
.
( | , ) () () ()
js
ijs icidi
pt c d pt t t
(11)
Table 3:
(|)
j
i
p
ct
,
(|)
s
i
p
dt
For Bayesian method.
t
1
t
2
t
3
(|)
j
i
p
ct
c
1
0.70 0.50 0.10
c
2
0.30 0.50 0.90
(|)
s
i
p
dt
d
1
0.10 0.20 0.80
d
2
0.10 0.50 0.10
d
3
0.80 0.30 0.10
Table 4:
()
j
ci
t
,
()
s
di
t
For fuzzy Bayesian method.
t
1
t
2
t
3
()
j
ci
t
c
1
0.10 1.00 0.50
c
2
0.10 0.50 1.00
()
s
di
t
d
1
0.00 0.50 1.00
d
2
0.10 1.00 0.50
d
3
1.00 0.50 0.00
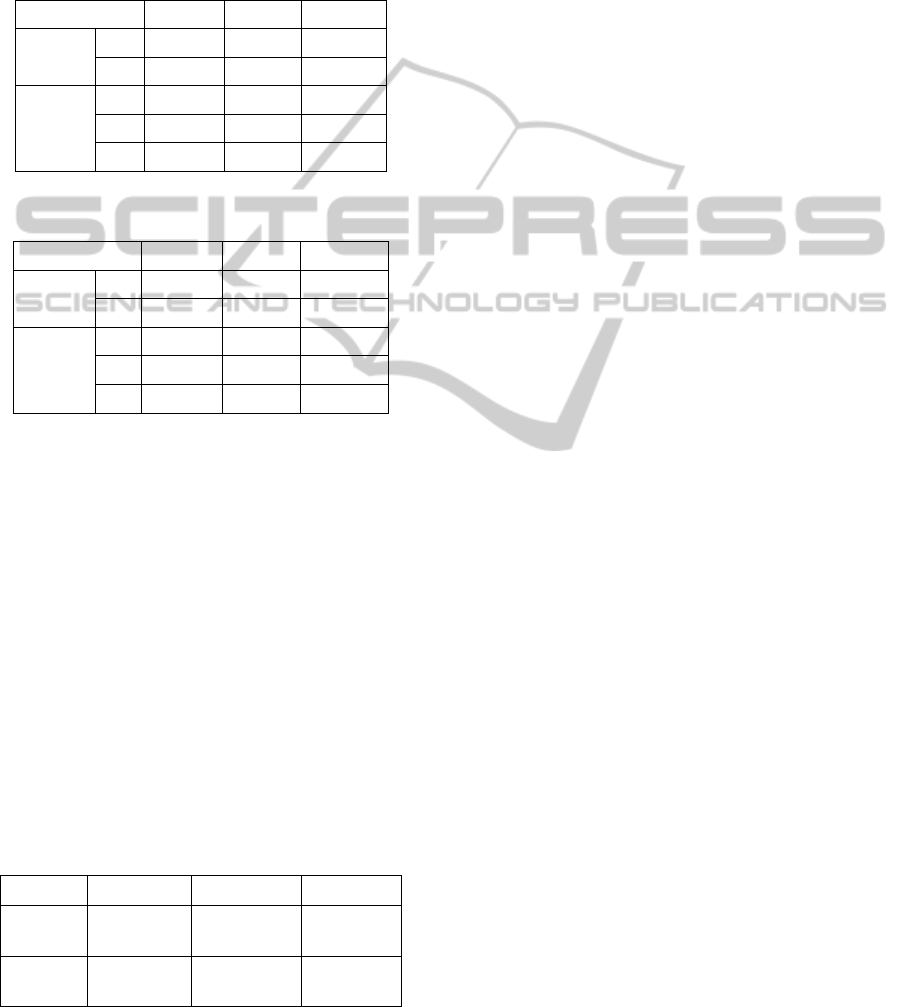
The results of TE are given in Table 5. As we can
see, e.g., at k
1
, the TE results of the Bayesian
classifier is (0.15, 0.72, 0.13), which means
1
(|)
p
te
=0.15,
2
(|)
p
te
=0.72,
3
(|)
p
te
= 0.13. It is
shown to the user in a simpler and more intuitive
form as medium (0.7), which means the current
threat level is medium with a confidence of 0.7. The
overall performances of the two methods are
competing, though the fuzzy Bayesian classifier is
easier to implement due to the easiness of defining
()
j
ci
t
,
()
s
di
t
. For example, we need not to make
sure the sum of
()
j
ci
t
over
i
t
is one when using
fuzzy Bayesian classifier, but we need to make sure
values of
(|)
j
i
pc t
over
j
c sum to one when using
the conventional Bayesian classifier.
Table 5: Threat Evaluation Results.
(|)
i
p
te
k
1
k
2
k
3
Classifier 1
a
(0.15, 0.72, 0.13)
medium (0.7)
(0.11, 0.69, 0.20)
medium (0.7)
(0.09, 0.17, 0.74)
high (0.7)
Classifier 2
a
(0.01, 0.64, 0.35)
medium (0.6)
(0.01, 0.56, 0.43)
medium (0.6)
(0.00, 0.26, 0.74)
high (0.7)
a.
Classifier 1: Bayesian classifier, Classifier 2: fuzzy Bayesian
classifier
6 CONCLUSIONS
It is more natural and convenient to model the
uncertainty involved in threat evaluation using the so
called fuzzy Bayes’ Theorem, which has competitive
performance with the conventional Bayesian method
and the merit of an open structure of rule database.
ACKNOWLEDGEMENTS
This work was supported in part by the Chinese
NSFC under Grant 61141009.
REFERENCES
Bailadora, G., Triviño, G., 2010. Pattern recognition using
temporal fuzzy automata. Fuzzy Sets and Systems, 161,
37–55.
Clausewitz, C. V., Graham, J. J., Honig, J. W., 2004. On
War, Barnes & Noble Publishing.
Cheeseman, P., 1988. Probabilistic versus fuzzy reasoning.
Uncertainty in Artificial Intelligence, North-Holland,
Amsterdam, Vol. 1, 85-102.
Chen, C. H., Ho, P. P., 2008. Statistical pattern recognition
in remote sensing. Pattern Recognition, 41(9), 2731-
2741.
Coletti, G., Scozzafava, R., 2004. Conditional probability,
fuzzy sets, and possibility: a unifying view. Fuzzy Sets
and Systems, 144, 227–249.
Delmotte, F., Smets, P., 2004. Target identification based
on the transferable belief model interpretation of
Dempster-Shafer model. IEEE Trans. On Systems,
Man, and Cybernetics - Part A: Systems and Humans,
34, 457–471.
Dubois, D., Moral, S., Prade, H., 1997. A semantics for
possibility theory based on likelihoods. Journal of
Mathematic Analysis and Applications, 205, 359–380.
Dubois, D., Foulloy, L., etc, 2004. Probability-possibility
transformations, Triangular fuzzy sets, and
probabilistic inequalities, Reliable Computing, 10,
273-297
Jain, A. K., Duin, R. P. W., Mao, J., 2000. Statistical
pattern recognition: a review. IEEE Trans. On Pattern
Analysis and Machine Intelligence, 22, 4–37.
Jan, T., 2004. Neural network based threat assessment for
automated visual surveillance. Proc. of 2004 IEEE
International Joint Conference on Neural Networks,
Vol.2, 1309 – 1312.
Lane, R.O., Nevell, D.A., Hayward, S.D., Beaney, T.W.,
2010. Maritime anomaly detection and threat
assessmen. Proc. of the 13th Conference on
Information Fusion, QinetiQ, UK, pp1–8.
Leung, H., Wu, J., 2000. Bayesian and Dempster-Shafer
target identification for radar surveillance. IEEE
Trans. on Aerospace and Electronic Systems, 36, 432–
447.
AirDefenseThreatEvaluationusingFuzzyBayesianClassifier
231

Mouchaweh, M. S., Billaudel, P., 2006. Variable
Probability-Possibility Transformation for the
Diagnosis by Pattern Recognition. International
Journal of Computational Intelligence: Theory and
Practice, 1(1 ).
Oussalah, M., 2000. On the probability/possibility
transformations: a comparative analysis. Journal of
General Systems, 29(5), 671-718.
Paradis, S., Benaskeur, A., Oxenham, M.G., Cutler, P.,
2005. Threat evaluation and weapon allocation in
network-centric warfare. Proc. of the 7th International
Conference on Information Fusion, Stockholm, 1078–
1085
Roux, J. N., Vuuren, J. H., 2007. Threat evaluation and
weapon assignment decision support: a review of the
state of the art. ORiON, 23(2), 151–187.
Steinberg, A. N., 2005. An approach to threat assessment.
Proc. of the 8th International Conference on
Information Fusion, Vol. 2, Philadelphia, USA, 1256–
1263.
Xu, Y., Wang, Y., Miu, X., 2012. Multi-attribute decision
making method for air target threat evaluation based
on intuitionistic fuzzy sets. Journal of Systems
Engineering and Electronics, 23(6), 891–897.
Young, S.S., Scott, P.D., Nasrabadi, N.M., 1997. Object
recognition using multilayer Hopfield neural network.
IEEE Trans. On Image processing, 357–372.
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
232
