
Adaptive Resource Management for Balancing Availability
and Performance in Cloud Computing
Ravi Jhawar and Vincenzo Piuri
Dipartimento di Informatica, Universit`a degli Studi di Milano, 26013, Crema, Italy
Keywords:
Availability, Cloud Computing, Dynamic Adaption, Fault Tolerance Management, Performance, Resource
Management, Security.
Abstract:
Security, availability and performance are critical to meet service level agreements in most Cloud computing
services. In this paper, we build on the virtual machine technology that allows software components to be
cheaply moved, replicated, and allocated on the hardware infrastructure to devise a solution that ensures users
availability and performance requirements in Cloud environments. To deal with failures and vulnerabilities
also due to cyber-attacks, we formulate the availability and performance attributes in the users perspective and
show that the two attributes may often be competing for a given application. We then present a heuristics-
based approach that restores application’s requirements in the failure and recovery events. Our algorithm uses
Markov chains and queuing networks to estimate the availability and performance of different deployment
contexts, and generates a set of actions to re-deploy a given application. By simulation, we show that our
proposed approach improves the availability and lowers the degradation of system’s response time compared
to traditional static schemes.
1 INTRODUCTION
The increasing demand for flexibility and scalability
in obtaining and releasing computing resources in a
cost-efficient manner has resulted in a wide adoption
of the Cloud computing paradigm. The effective com-
bination of existing technologies and modern business
models in Cloud computing provides a suitable alter-
native to the users to deploy applications with diverse
and dynamically changing requirements. While the
benefits are immense, due to high complexity, even
carefully engineered Cloud infrastructures are subject
to a large number of failures and vulnerable to vari-
ous types of cyber-attacks (e.g., server crashes, denial
of service attacks). These vulnerabilities and failures
evidently have a significant impact on the users ap-
plications and, as a consequence, there is a pressing
need to address users availability and security issues
(Samarati and De Capitani di Vimercati, 2010).
The traditional way to increase the availability of
software is to employ fault tolerance techniques at
development time. This approach requires users to
build their applications by taking the system architec-
ture into account. Unfortunately, the low-level archi-
tectural details are not widely available to the users
because of the abstraction layers of Cloud comput-
ing. An alternative to the traditional approach is to
offer fault tolerance as a service to users applica-
tions (Jhawar et al., 2012b). In this approach, a third
party designs an appropriate fault tolerance policy
based on users high level requirements and transpar-
ently applies it on the applications. To realize the no-
tion of fault tolerance as a service, the Fault Tolerance
Manager (FTM), presented in (Jhawar et al., 2012b),
uses the virtualization technology to apply fault toler-
ance mechanisms at the granularity of virtual machine
instances. For example, to increase availability, FTM
replicates the entire virtual machine in which the ap-
plication tasks are deployed by taking into account
the failure characteristics and recoverybehavior of the
system. The constraints and placement techniques de-
scribed in (Jhawar et al., 2012a) can then used to sat-
isfy the deployment requirements of the chosen fault
tolerance policy.
In this paper, we extend the concept of fault tol-
erance policy management, embedded in FTM, and
present a solution concerning two important aspects
of the service that were not analyzed previously. The
first aspect is based on the observation that the fault
tolerance policy that is initially selected and applied
by FTM on an application may not be satisfied when
system changes such as server crashes or network
254
Jhawar R. and Piuri V..
Adaptive Resource Management for Balancing Availability and Performance in Cloud Computing.
DOI: 10.5220/0004535902540264
In Proceedings of the 10th International Conference on Security and Cryptography (SECRYPT-2013), pages 254-264
ISBN: 978-989-8565-73-0
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
congestion happen. For example, a fault tolerance
policy may require three replicas of an application
to ensure a specified level of availability; however, if
a replica fails at runtime, overall availability require-
ments are not satisfied. To avoid such situations, we
need to take into account the current resource status
of the system and adapt the fault tolerance service
to ensure that the policy conditions of the application
are satisfied. In this direction, we present a solution
that dynamically identifies the system changes that af-
fect users applications and responds to the changes by
adapting the allocation to the new working status of
the Cloud by means of a heuristic approach. We re-
alize our solution as an online controller that, instead
of computing an allocation from scratch when failures
happen, uses the monitoring information (e.g., appli-
cation workload, bandwidth availability, resource sta-
tus) and virtualization technologyconstructs to satisfy
users requirements by applying fewer actions. The
online controller can be integrated within the FTM
as a complementary component that ensures users re-
quirements at runtime.
The second aspect considered in this paper is
based on the observation that high availability and
performance of an application may often be compet-
ing attributes. For example, availability can be im-
proved by increasing the number of application repli-
cas but that may diminish its performance due to ad-
ditional processing and communication required to
maintain consistency. In fact, Brewer’s theorem states
that consistency, availability, and partition tolerance
are the three commonly desired properties by a dis-
tributed system, but it is impossible to achieve all
three (Gilbert and Lynch, 2002). Our solution takes
into account the availability and performance require-
ments while applying the fault tolerance service on an
application. In particular, we design the online con-
troller to balance both availability and performance
attributes while generating a new configuration for a
given application.
Existing solutions within this framework have not
considered the aspect of balancing the application’s
availability and performance.
The remainder of the paper is as follows. Sec-
tion 2 presents some preliminary concepts and our
assumptions on users applications and the Cloud in-
frastructure. Section 3 provides a detailed discussion
on the availability and performance metrics and their
inter-relationship. Section 4 presents an approach to
realize the online controller. Section 5 reports our
simulation study results. Section 6 summarizes the
related work and Section 7 outlines our conclusions.
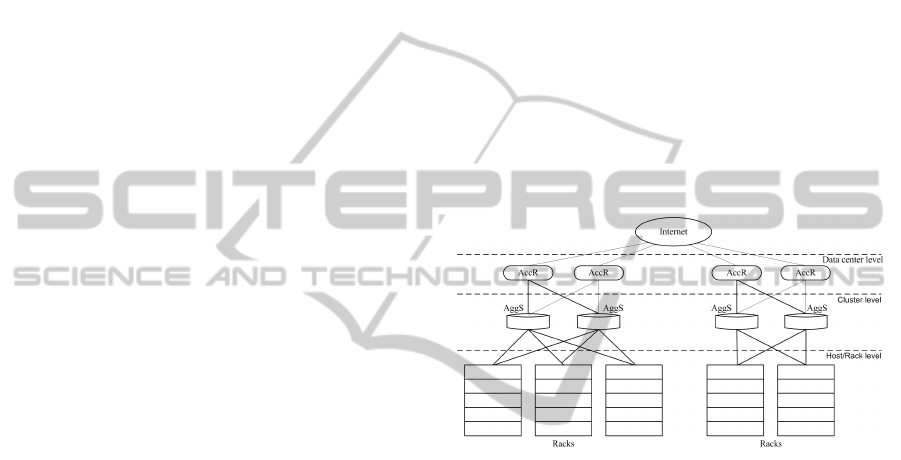
2 SYSTEM MODEL
We consider the Cloud computing infrastructure built
by inter-connecting large-scale, geographically dis-
tributed, data centers. Each data center (DC) con-
sists of thousands of hosts that are organized into
racks and clusters, and each host contains multiple
processors, storage disks, memory modules and net-
work interfaces. In terms of the network architecture:
physical hosts are first connected via high-speed rack
switches, which are in turn connected to (primary and
backup) aggregation switches (AggS). The subsystem
under an AggS can be viewed as a cluster. An AggS
connects tens of racks to redundant access routers
(AccR), and each AccR connects different data cen-
ters via the Internet backbone (Gill et al., 2011). Fig-
ure 1 illustrates an example of a Cloud infrastructure
with two data centers, having hosts arranged as racks
and clusters.
Figure 1: An example of Cloud infrastructure showing var-
ious deployment levels.
Let H be the set of all hosts in the system that
is partitioned into a set C of clusters. We represent
the resource characteristics of each host h∈H using
a multi-dimensional vector
−→
h , where each dimen-
sion represents the amount of residual resources (i.e.,
resources not yet allocated) of a specific type (e.g.,
CPU, memory) available on that host. For simplic-
ity, we specify residual resource capacity of hosts us-
ing normalized values between 0 and 1. For example,
−→
h =(0.6,0.5) implies that 60% of CPU, 50% of mem-
ory on host h is available for use. The service provider
supplies computing resources to its users in the form
of virtual machine (VM) instances of a given size. Let
V be the set of VM instances. Since resource dimen-
sions of VM instances are same as that of physical
hosts, resource capacity of the VM can also be rep-
resented using multi-dimensional vector
−→
v and nor-
malized values. For example,
−→
v =(0.4,0.3) implies
that VM v∈V will consume 40% of CPU and 30% of
memory from a physical host. Note that a threshold
on the usage of resources of physical hosts can be de-
fined (e.g., (Jhawar et al., 2012a)), and heterogeneity
AdaptiveResourceManagementforBalancingAvailabilityandPerformanceinCloudComputing
255

of hardware resources can be made transparent to the
users (e.g., Amazon EC2 service).
A user can deploy its applications using the
Cloud-based infrastructuredelivery service offered by
the service provider. For the sake of generality, we do
not model users applications making specific archi-
tectural assumptions and consider it to be a composi-
tion of a set of tasks. That is, let A be the set of all user
applications in the system, then an application A∈A is
a group of tasks A={T
1
,...,T
m
}. To achievehigh scal-
ability, the user can deploy each task of her applica-
tion using an individual VM instance v. Furthermore,
to improve fault tolerance, the user can engage with
the FTM, running on the envisioned Cloud, by spec-
ifying its high-level availability goals. For example,
the user can specify the desired availability Avail
d
as
99.5%. Based on users requirements and system’s re-
source status, the FTM selects an appropriate fault
tolerance policy and associates each task T
i
∈A with
a set of replicas R(T
i
)={t
i,1
,. ..,t
i,|r|
}. The FTM then
defines an allocation function alloc : V → H that al-
locates each replica t
i, j
∈T
i
, deployed in VM instances
v
i, j
∈V , on a physical host in the infrastructure h∈H .
We note that there is a one-to-one relationship be-
tween tasks and VM instances.
The alloc function is invoked each time a request
to deploy an application arrives, and it performs an
allocation incrementally on the current resource sta-
tus of the Cloud. We denote the specific output of
the alloc function, that describes the exact location
of each task (and its replicas) of an application, as a
configuration. To determine a configuration, the alloc
function may consider only a subset of the infrastruc-
ture. For example, alloc may consider only the hosts,
network links, and switches within a given cluster to
deploy an application. We denote the subsystem cho-
sen within the infrastructureas a deployment level DL.
To meet users availability requirements, the al-
location function must take into account the failure
behavior of various infrastructure components. With
respect to the failure behavior, we define a partial
ordered hierarchy (DL,
DL
), where DL denotes the
deployment level and
DL
defines the relationship
between different deployment levels. For example,
C
1
DL
DC
1
indicates that data center DC
1
is a larger
subsystem or deployment level when compared to
cluster C
1
. A transitive closure
∗
DL
that indicates
the “contains-in” relationship also exists on
DL
. For
example, h
1
∗
DL
C
1
∗
DL
DC
1
indicates that host h
1
is part of cluster C
1
that in turn exists in data cen-
ter DC
1
. Intuitively, the availability increases with in-
creasing deployment level. That is, availability for
an individual host is smaller than the availability of a
cluster, which is still smaller than the availability of
a data center. Therefore, the allocation function can
take into account the mean time between failures for
each deployment level MTBF
DL
and map tasks of a
given application based on users desired availability
Avail
d
.
To meet users performance requirements, the al-
location function must take into account the amount
of resources allocated to each task (size of VM in-
stances) of the application and network latency be-
tween individual replicas of a task. The latency be-
tween hosts depends on how far they are from one
another. For example, hosts in the same rack have
a lower network latency than hosts across different
clusters. Hence, if L(DL) denotes the maximum la-
tency between two hosts in the deployment level DL,
then the allocation function alloc can decide suitable
DL for each task replica based on users desired per-
formance Perf
d
, where Perf
d
can be expressed in terms
of expected response time.
3 AVAILABILITY AND
PERFORMANCE METRICS
In this section, we discuss the availability and per-
formance metrics in the users perspective, that is, we
model the infrastructure parameters (e.g., failures and
network congestion) that have an impact on the avail-
ability and performance of users applications. We
then discuss the relationship between the two metrics.
3.1 Availability Model
We consider a task replica, deployed on the physical
host h, to have failed when h is completely nonoper-
ational (i.e., h experiences a crash fault). In this con-
text, an application is available if at least one replica
of each of its tasks can be readily executed at a given
point in time. Availability of an application can then
be measured as the fraction of time for which it is
available over a specified period of time. A fault tol-
erance scheme can improve the availability of a given
application provided at least two replicas are used
for each of its tasks. However, only considering two
replicas may not be sufficient to avoid single points
of failures. For example, if both (or all) the replicas
are allocated on the same physical host, then the host
failure may result in the complete failure of the appli-
cation. This implies that the allocation function alloc
must also take into account the location of individual
replicas in the infrastructure to correctly realize a fault
tolerance policy. In other words, a configuration is in-
fluenced both by the number of replicas of application
tasks and their locations in the Cloud. We use nR(T
i
)
SECRYPT2013-InternationalConferenceonSecurityandCryptography
256

to denote the number of replicas of task T
i
currently
available.
If DL
max
(T) is the highest deployment level
within which the application task T must be allocated,
then failures at DL
max
(T) or higher will cause the ap-
plication to fail. For example, if task T of an appli-
cation has two replicas allocated on different hosts of
the same cluster C, then DL
max
(T) is cluster C and its
failure results in unavailability of the application.
Availability of a given application can be esti-
mated by measuring the MTBF of its configuration
(based on the failure and repair properties of the hosts
involved in the allocation). This behavior can be
represented for an application using a Markov chain
that considers all the tasks and their replicas (Jhawar
and Piuri, 2012). In this paper, we extend such
approach to represent the failure behavior of vari-
ous deployment levels. As typically considered in
the literature (Jung et al., 2010), failures at deploy-
ment levels are modeled as a Poisson process with
rate λ
DL
=1/MTBF
DL
. Since application tasks are
mapped on the infrastructure, its failure arrival pro-
cess is also a Poisson process with rate
∑
DL
λ
DL
. This
implies that a failure event affects the deployment
level DL with probability
λ
DL
∑
DL
λ
DL
and causes the application having DL
max
lower than
DL to fail (∀T
i
∈ A, DL
max
(R(T
i
))
∗
DL
DL). Hence,
the MTBF for an application A in a given configura-
tion is
MTBF
A
= (
∑
∀DL, ∃T
i
∈A, DL
max
(R(T
i
))
∗
DL
DL
MTBF
−1
DL
)
−1
Given the users desired availability for its appli-
cation Avail
d
, similarly to (Jung et al., 2010), the
FTM can first calculate the lower-bound of desired
mean time between failures using the system’s recov-
ery policy:
MTBF
d
A
=
Avail
d
· MTTR
1− Avail
d
where MTTR is the mean time to repair value. Then,
based on the desired and estimated failure values and
system’s properties, it can define the deployment level
for each application task to ensure users goals are sat-
isfied. The identified deployments levels can be pro-
vided as placement constraints to the alloc function
as follows.
• To limit a VM instance V
i
∈V hosting the appli-
cation task T
i
∈A on being allocated on a specified
deployment level DL, the FTM can define the set
Restr={(R(T
i
),DL
j
)} for each task, and ensure
that the allocation function alloc:V →H satisfies
the following condition:
∀(R(T
i
),DL
j
) ∈ Restr =⇒
alloc(V
i
) ∈ DL
j
,DL
j
⊆ H
This condition is analogous to defining the maxi-
mum deployment level DL
max
(R(T
i
)) tasks.
• To avoid single points of failures, FTM can de-
fine the set Distr={(t
i
,t
j
)|t
i
,t
j
∈ R(T)} specify-
ing the task replicas that cannot be deployed on
the same host and ensure that the allocation func-
tion alloc:V →H satisfies the following condi-
tion:
∀t
i
,t
j
∈ R(T),h ∈ H : (t
i
,t
j
) ∈ Distr =⇒
alloc(v
i
) 6= alloc(v
j
)
This implies that FTM can translate users high-level
availability requirements to low system relevant con-
ditions by defining allocation conditions. Note that
an application can meet its availability demands as
long as the aforementioned conditions and values are
satisfied. Furthermore, by means of such conditions,
three deployment scenarios for alloc are possible:
task replicas can be placed on the physical hosts that
belong to the i) same cluster, ii) different clusters in
the same data center, and iii) different data centers.
The first configuration offers least failure indepen-
dence as replicas cannot execute the fault tolerance
protocol upon a single switch failure. The second
configuration offers higher failure independence, and
the third configuration offers high level of failure in-
dependence.
3.2 Performance Model
We consider three parameters to influence the perfor-
mance of an application: i) number of replicas for
each task nR(T
i
), ii) amount of resources allocated to
each task, and iii) network latency between task repli-
cas. In general, the amount of processing and commu-
nication necessary to maintain a consistent state (as
defined by the fault tolerance policy) increases as the
number of replicas increase. In other words, the re-
sponse time of the application increases as the number
of replicas for each of its tasks increase. The mean re-
sponse time also increases due to the network latency
that increases as the distance between task replicas
increase. Finally, the processing and memory capac-
ity allocated to an application decides the amount of
workload that its tasks can handle.
To quantify the performance of a given configu-
ration, similarly to (Jung et al., 2010), (Qian et al.,
2011), we use the layered queuing network formal-
ism (Franks et al., 2009) as our application model.
AdaptiveResourceManagementforBalancingAvailabilityandPerformanceinCloudComputing
257

This queuing network model allows us to predict the
response time of the application and resource require-
ments of task replicas for a given configuration and
workload. We represent application tasks using first-
come first-served (FCFS) queues and resource re-
quirements (size of the VM instance) using the pro-
cessor sharing queues. The FTM can measure the
parameters of the model such as the response time,
whenever a request arrives, by calculating the delay
between the incoming request and the outgoing re-
sponse. Using the queuing network, similarly to avail-
ability, the FTM can then define a set of performance
conditions that allow it to ensure that the allocation
performed by the alloc function satisfies users de-
sired performance requirements Perf
d
. We discuss
two such conditions:
• The first condition ensures that application tasks
obtain the amount of CPU resources required to
perform their tasks with optimal response time.
Based on Perf
d
and the queuing model discussed
above, FTM can define the minimum size of the
VM instances
−→
v for each task. The allocation
function alloc then maps the VMs only on the
hosts with the sufficient residual resources capac-
ity
−→
h
∀h ∈ H :
∑
t
i, j
∈R(T
i
),T
i
∈A,v
i, j
∈V |alloc(v
i, j
)=h
−→
v ≤
−→
h
• The second condition defines the maximum al-
lowed network latency between two task replicas
deployed in VM instances v
i
,v
j
∈V . In particu-
lar, FTM can define a set MaxL={(v
i
,v
j
,L
max
)|
v
i
,v
j
∈V } to specify the acceptable network la-
tency L
max
between VM instances v
i
and v
j
. The
condition can then be used to ensure that the allo-
cation function satisfies the following condition:
∀v
i
,v
j
∈ V : (v
i
,v
j
,L
max
) ∈ MaxL
=⇒ Latency(alloc(v
i
),alloc(v
j
)) ≤ L
max
Note that L(DL) denotes the maximum latency be-
tween two hosts in the deployment level DL (see Sec-
tion 2). This implies that L
max
should be greater than
L(DL) after allocation. We choose the number of
replicas for a task dynamically (as discussed in Sec-
tion 4) building on the initial configuration to sat-
isfy users performance requirements. Lastly, note that
the response time degradation for a configuration can
be measured as the difference between the estimated
mean response time and the desired mean response
time.
ClusterLevel DatacenterLevel
0.8
0.85
0.9
0.95
1
Availability
2 replicas 3 replicas 4 replicas
Figure 2: Availability at different deployment levels with
varying number of replicas.
ClusterLevel DatacenterLevel
0.8
0.85
0.9
0.95
1
Performance
2 replicas 3 replicas 4 replicas
Figure 3: Performance in terms of response time at different
deployment levels with varying number of replicas.
3.3 Relationship between Availability
and Performance
Since input parameters and availability values of
hardware and system software are typically vendor-
confidential, we derive this data from the tables pub-
lished in (Kim et al., 2009)(Tang et al., 2007)(Smith
et al., 2008). Based on this data and our model-
ing approach defined in the previous sections (using
Markov chains and queuing networks), we show the
relationship between the availability and performance
parameters. In particular, we estimate the availability
Avail
e
and performance Perf
e
of a given application
(with a single task) having 2, 3 and 4 replicas, de-
ployed in i) different clusters within a data center and
ii) different data centers in the Cloud. Here, we do not
discuss the scenario where task replicas are deployed
within a cluster since their behavior only depends
on the availability and performance attributes of the
physical hosts. A detailed description of the simula-
tion environment setup and our evaluation methodol-
ogy is presented in Section 5.
Figure 2 illustrates how availability of the appli-
cation changes for different configurations. We ob-
SECRYPT2013-InternationalConferenceonSecurityandCryptography
258

serve that the availability increases as the number of
replicas of the application increase, and availability
when the replicas are placed in different data cen-
ters is greater than the availability when replicas are
placed in different clusters in the same data center.
This implies that, availability of an application can be
improved also by changing the location of its replicas.
Figure 3 illustrates how the performance of an ap-
plication changes for different configurations. We as-
sume that sufficient CPU capacity is allocated to each
task, so the performance values reported here largely
depends on the network latency. For the sake of clar-
ity, the results are presented using normalized val-
ues between 0 and 1. We can observe that the per-
formance decreases as the number of replicas of the
application increase, and performance of an applica-
tion when its replicas are placed in different clusters
within a data center is greater than the performance
when its replicas are placed in different data centers.
In the practice, we can see that there is a strict de-
pendency between the two parameters, and therefore,
the configuration choice for a given application must
take into account both performance and availability
metrics.
4 ONLINE CONTROLLER
In the previous section, we discussed the availability
and performance models of users applications. Based
on the models, we showed that availability and perfor-
mance are competing parameters, and the allocation
function that deploys users applications on the Cloud
infrastructure must balance the two parameters while
generating configuration solutions. We also presented
an approach to translate high-level user requirements
to low-level conditions, and discussed how the alloc
function uses the models to generate configuration so-
lutions while satisfying users requirements. Note that
the specific output of the alloc function that describes
the exact location of each task (and its replicas) in the
Cloud infrastructure is denoted as configuration.
The Cloud computing environment is highly dy-
namic in terms of task activation, bandwidth availabil-
ity, component failures and recovery. Due to the dy-
namic nature, the current configuration of a given ap-
plication may become obsolete, and its performance
and availability goals may not be satisfied. For exam-
ple, replication level of a given task may be reduced
due to a server crash, violating the availability goals.
Hence, static deployment strategies that perform only
initial allocation (such as alloc function) may not pro-
vide satisfactory results at runtime, and an adaptive
approach to resource management is necessary.
One method to respond to system changes is to
recompute the allocation from scratch using the alloc
function. However, this method is rather naive and
may not scale well during runtime. In this section, we
present a heuristics-based approach that minimizes
the performance and availability degradation of users
applications due to various system changes. Our
heuristic is realized as the online controller and in-
troduced in the envisioned Cloud environment. The
online controller uses the system’s monitoring infor-
mation (e.g., application workload, server’s failure
behavior, processor and bandwidth usage), and re-
deploys the applications as a response to the events
that may violate the application’s performance or
availability goals. In particular, it generates a new
configuration for users applications by creating new
task replicas in case of host failures and by migrat-
ing individual tasks on (other working hosts) orthogo-
nally across different deployment levels in the system
to satisfy the overall performance and availability re-
quirements.
In our context, the online controller is integrated
in the FTM to provide fault tolerance support also
during runtime. The activities required to change the
current allocation status and re-deploy users applica-
tions are realized using the virtualization technology
constructs. That is, by treating the task replicas as in-
dividual tasks, the online controller generates the new
configuration in terms of the following actions:
• Launch(t,h): Due to system failures, the con-
troller may identify that new replicas of a given
task must be created. To realize this function, it
instantiates a VM v, hosting the task replica t∈T,
on the physical host h∈H using the Launch(t, h)
action.
• Migrate(t, h
i
,h
j
): As a response to performance
or availability degradation, the online controller
may have to change the current location of a sub-
set of task replicas. For example, to respond to
network congestion in cluster C
1
, the online con-
troller may want to move task t
1
(initially hosted
in C
1
) to another cluster C
2
. This function can
be realized using the Migrate(t, h
i
,h
j
) action by
specifying that VM instance deployed on host
h
i
∈H , containing a task replica t∈T, must be
moved to host h
j
∈H .
• Delete(t,h): Due to performance overhead, the
online controller may need to reduce the replica-
tion level of a task. This action can be specified
using the Delete(t, h) construct that removes the
VM instance, hosting task replica t∈T, from host
h∈H .
We now define a mapping function map : V → H that
AdaptiveResourceManagementforBalancingAvailabilityandPerformanceinCloudComputing
259

1: RECONFIGURE
2: INPUT alloc:V →H , T
i
∈A, H , Restr, Distr, MaxL
3: OUTPUT Set containing actions Action
4: Action:=
/
0
5: /* If real availability is lower than the desired availability*/
6: if Avail
r
< Avail
d
then
7: /*Identify the application tasks with replica failures*/
8: for each T
i
∈ a with nR(T
i
) < |T
i
| do
9: /*Create task replicas in the original deployment level DL*/
10: /*without violating the performance goals*/
11: while (Avail
e
≥ Avail
d
∨ nR(T
i
) ≥ |T
i
|) ∧ (Perf
e
≥ Perf
d
) do
12: /*Include the launch action in Action*/
13: ∀t
i, j
∈T
i
, map(t
i, j
)∈DL,
14: Action := Action∪{Launch(t
i, j
,map(t
i, j
))}
15: end while /*Expected availability or replication level is met*/
16: end for
17: /*If expected availability is still lower than the desired one*/
18: while Avail
e
< Avail
d
do
19: /*Move task replicas to the higher deployment levels DL*/
20: if ∀T
i
∈a, t
i, j
∈T
i
, DL, map(t
i, j
)∈DL s.t. Perf
e
≥ Perf
d
then
21: /*Change in configuration by migrating task is possible*/
22: Action = Action ∪{Migrate(t
i, j
,alloc(v
i, j
),map(t
i, j
))}
23: else
24: /*Increase number of replicas to improve availability*/
25: /*Traverse from highest deployment level to lowest*/
26: ∀T
i
∈ a,DL, Perf
e
≥ Perf
d
,
27: Action = Action ∪ {Launch(t
i, j
, map(t
i, j
))}
28: end while
29:/* If real performance is lower than the desired performance*/
30:if Perf
r
< Perf
d
then
31: /*Identify the application tasks with affected response time*/
32: for each T
i
∈ a with L(T
i
) > L
max
do
33: /*Delete task replicas in the original deployment level DL*/
34: /*without violating availability goals*/
35: while (Perf
e
≥ Perf
d
∨ L(T
i
) ≤ L
max
) ∧ (Avail
e
≥ Avail
d
) do
36: /*Include the delete action in Action*/
37: ∀t
i, j
∈T
i
, map(t
i, j
)∈DL,
38: Action := Action ∪ {Delete(t
i, j
, map(t
i, j
))}
39: end while /*Expected performance or latency obtained*/
40: end for
41: /*If expected performance is still lower than the desired one*/
42: while Perf
e
< Perf
d
do
43: /*Move task replicas to the lower deployment level DL*/
44: if ∀T
i
∈a, t
i, j
∈T
i
, DL, map(t
i, j
) ∈ DL s.t. Avail
e
≥ Avail
d
then
45: /*Change in configuration by migrating task is possible*/
46: Action = Action ∪{Migrate(t
i, j
,alloc(v
i, j
),map(t
i, j
))}
47: else
48: /*Decrease the number of replicas to improve performance*/
49: /*Traverse from lowest deployment level to highest*/
50: ∀T
i
∈ a,DL, Avail
e
≥ Avail
d
,
51: Action = Action ∪ {Delete(t
i, j
, map(t
i, j
))}
52: end while
53:return Action /*and call alloc to schedule the actions*/
Figure 4: Pseudo-code algorithm for generating a new con-
figuration plan.
behaves similarly to alloc but performs only a tenta-
tive search. That is, the mappings generated by map
do not reflect on the infrastructure and must be ex-
plicitly committed using alloc. For example, using
map(v) = h, the residual resource capacity, estimated
performance and availability can be computed, and
other placement conditions can be verified; but, the
actual allocation can be performed using alloc (that
gives real performance and availability values). Note
that a task, deployed in a VM instance v, can be al-
located on a host h∈H when the conditions specified
in the Restr, Distr, MaxL sets are satisfied, and the
host has sufficient resources to accommodate the task.
We implement this problem as a bin-packing problem
where the hosts represent the bins and VMs repre-
sent the items. The allocation function alloc can be
realized using a packing algorithm that satisfies addi-
tional constraints such as the one described in (Jhawar
et al., 2012a), (Machida et al., 2010), (Hermenier
et al., 2011) (Seiden, 2002). The alloc function is
invoked whenever there is a change in the application
(e.g., addition of tasks) to perform an incremental al-
location on the infrastructure. Once the application is
deployed and initial configuration generated, the on-
line controller is invoked to ensure the applications
requirements at runtime.
Figure 4 depicts the pseudo-code of the algorithm
that computes the set of actions that, when committed,
generates a new configuration for a given application.
It takes the current configuration, system status, ap-
plication tasks and the sets specifying allocation con-
ditions as input, and generates the sequence of actions
that brings the system to a new feasible configura-
tion state. The algorithm is invoked when a failure
or performance degradation event happens. The algo-
rithm consists of two main conditions, one concern-
ing availability violation due to system failures (lines
5–28) and other concerning performance degradation
(lines 29–52). If the real availability of an applica-
tion is less than the desired one, we first identify the
task replica failures and tentatively launch new repli-
cas at the same deployment level using the map func-
tion. Note that the launch action is performed only
until the current replication level is same as the origi-
nal level and performance goals are not violated (lines
8–16). When addition of replicas does not satisfy the
requirements, the algorithm tries to move task repli-
cas to a higher deployment level using the Migrate
action (note that the availability increases with in-
creasing deployment levels). This action allows the
online controller to generate the new configuration
without increasing the resource consumption costs. If
the performance condition conflicts by moving tasks
to higher deployment levels, additional replicas must
be created to improve the availability. To create new
replicas, we start from higher deployment levels and
move gradually to lower levels, creating the replicas
SECRYPT2013-InternationalConferenceonSecurityandCryptography
260
at the level where availability and performance goals
are fulfilled. These actions are realized using the mi-
grate and launch actions (lines 18–28). When users
availability requirements are satisfied, the algorithm
realizes the actions in Action using the alloc function.
In contrast, when real performanceis less than desired
performance, instead of launching new replicas, VM
instances are deleted, and instead of moving higher in
the hierarchy, migration takes place to lower deploy-
ment levels. These actions are based on the obser-
vation that decrease in the deployment or replication
level, improves the application performance. Note
that the online controller is invoked only when an ap-
plication experiences failures or performance degra-
dation, and therefore, it is suitable for long-running
tasks; short-running tasks are practically managed by
the FTM during initial deployment.
5 EXPERIMENTAL EVALUATION
In this section, we report the simulation results of
the experiments we conducted to evaluate the online
controller. In particular, we validate the controller in
terms of i) the time required to compute a new con-
figuration using the algorithm in Figure 4, ii) increase
in overall availability of an application, and iii) im-
provement with respect to the performance in varying
system contexts.
Setup. The hardware failure rates are provided by
many companies in the form of tables (Tang et al.,
2007). However, the task of attributing the cause of
failures and estimating the mean time to failure for
software components (e.g., hypervisor) is difficult. To
this aim, we derive the input parameter values from
(Kim et al., 2009) (e.g., 2.654e+003 and 3.508e-001
as mean time to failure and recovery respectively for
virtualized hosts) and use the ORMM Markov analy-
sis tool (Jensen, 2011) to obtain the output measures.
To make the results applicable for systems with differ-
ent MTBF and MTTR values, we normalize all times
to MTBF, and vary the MTTR over a range from 0.01
to 2.0. This indicates variation in repair times from
10% to 200% of actual MTBF, hence providing dif-
ferent availability values. Similarly, the parameters
for performance are obtained using the layered queue-
ing network solver (Franks et al., 2009). We note that
Markov analysis tool and queueing network solver are
used offline, and output parameter values are used to
configure the online controller simulator written in
C++. The simulation is executed on a machine hav-
ing Intel i7-2860QM 2.50GHz processor, with 16GB
of memory, running Windows 7 operating system.
We configure the Cloud infrastructure by ran-
40
60
80 100 120 140
160
180 200
0
1
2
Number of hosts
Time (s)
5
10
20 tasks
Figure 5: Time to compute the new configuration solution
wrt the number of hosts, for different number of tasks.
domly initializing the hosts with different amounts of
residual resources. This forms the basis for our online
controller to manage VM instances of a givenapplica-
tion on the current resource status of the Cloud. The
utilization of hosts are updated after launch, migrate
and delete actions, providing results on incremental
resource management. We also initialize varying net-
work latency between deployment levels, MTBF and
relative MTTR rates. For example, network latency
between VM instances vary depending on the deploy-
ment configuration(if replicas share a host, rack, clus-
ter, or a data center). The network latency within a
host is considered 0; if latency between two hosts in a
rack is x, latency is set to 1x, 1.5x and 2.5x for differ-
ent racks, clusters, and data centers respectively. We
select applications with different number of tasks (see
below) and randomly choose replicated task sets. The
simulation results presented here are the mean values
of ten executions of each configuration.
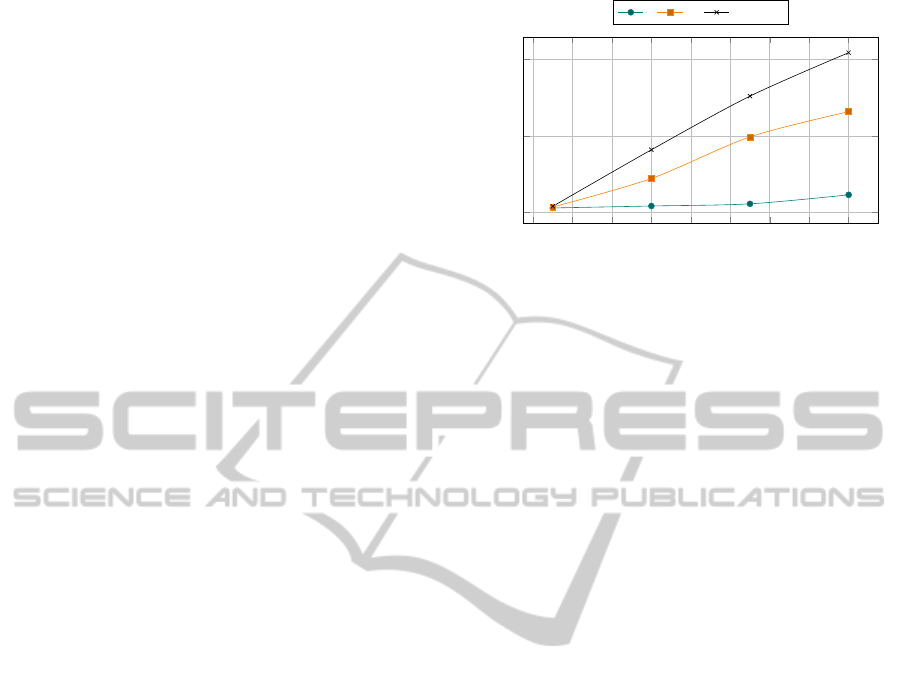
Processing Time Evaluation. We study the amount
of time it takes for the online controller to computethe
new configuration for applications with 5, 10 and 20
tasks, on an infrastructure containing 50 to 200 hosts.
Figure 5 illustrates how the processing time varies for
different contexts. For smaller size instances of appli-
cations and infrastructure, the solution can be com-
puted in the order of a few milli-seconds. When the
application contains 20 tasks, and infrastructure has
200 hosts, the processing time is about 2 seconds. In
particular, we observe higher processing time when
cluster level failures affect multiple task replicas. Al-
though computing new configuration has acceptable
scalability, note that the amount of time to actually
reconfigure the system may be larger due to several
system parameters (e.g., the time to migrate a VM
may be in the order of minutes, particularly when the
VM size is large, and the target host is connected via
Internet).
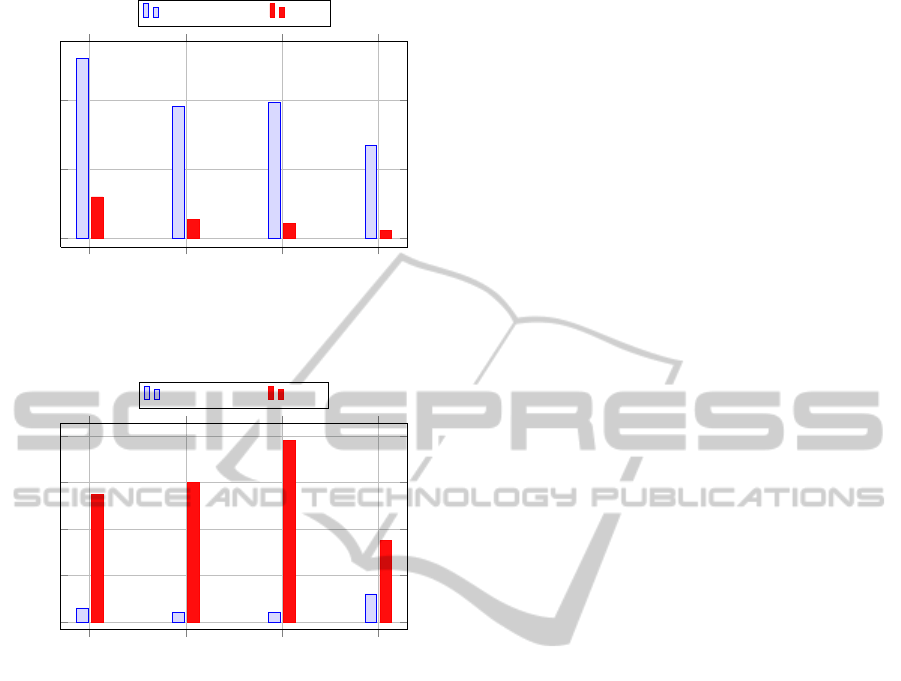
Availability and Performance Evaluation. We al-
locate the tasks, as defined by the alloc function, us-
AdaptiveResourceManagementforBalancingAvailabilityandPerformanceinCloudComputing
261
host
mulhosts
cluster
mulclusters
0
50
100
% increase in availability
Online Controller Static
Figure 6: Percentage increase in the availability due to re-
configuration.
rack
cluster
mulcluster
datacenters
0
20
40
60
80
% decrease in performance
Online controller Static
Figure 7: Percentage change in term of response
time/performance degradation due to reconfiguration.
ing the first-fit bin-packing strategy. This allocation
is considered static, and simulations are then com-
pared against the static scheme. To evaluate the in-
crease in availability, we introduce failures follow-
ing the MTBF values at different deployment levels
(hosts and clusters) in the infrastructure. Similarly,
to evaluate the performance, we randomly select a
deployment level (hosts and clusters) and assume an
increase in the network latency connecting those re-
sources. For each failure and change in network la-
tency, the online controller is invoked to compute the
new configuration.
We calculate the percentage increase in the avail-
ability of an application with 10 tasks, comparing
static approach and our proposed approach, for differ-
ent failure levels. A cluster failure implies assuming
all the hosts in that cluster have failed. Figure 6 shows
the difference between the availability levels. In case
of single host failures (that have least MTBF values),
the online controller is estimated to improve an appli-
cation’s availability by 120 percent (when compared
to static allocation). The increase in availability is
about 95 percent in case of multiple hosts and single
cluster failures, whereas, in case of multiple cluster
failures (with higher MTBFs), application’s availabil-
ity is estimated to improve by 70 percent when com-
pared to static deployment methods.
Similarly, we calculate the change in the response
time of an application by increasing the network la-
tency at different levels in the infrastructure. Figure 7
illustrates that online controller approach can signifi-
cantly reduce the performance degradation among ap-
plications when changes in the network latency af-
fects multiple clusters within a data center. On the
contrary, the percentage improvement in performance
due to disruptions at data center level is marginal.
Since, we regenerate or migrate the task replicas in
the event of failures or performance degradation as
opposed to the static scheme, the results cannot be
consistently compared. Nevertheless, the simulation
results clearly show that our approach of online con-
troller can provide high levels of graceful service
degradation to the users.
6 RELATED WORK
Virtualization technology is an important enabler of
the Cloud computing paradigm. It allows a service
provider to address concerns related to scalability
and issues with heterogeneous computing resources
in data centers (Hermenier et al., 2011), (Machida
et al., 2010), (Qian et al., 2011) (Cully et al., 2008).
The FTM framework uses the virtualization technol-
ogy to deliver fault tolerance as a service. The over-
all conceptual framework for FTM and an outline of
the required approach is presented in (Jhawar et al.,
2012b). Similarly to FTM, other fault-tolerant real-
time systems such as Mars (Kopetz et al., 1989) also
use static replication of processing tasks to ensure re-
liability. In the present paper, we extend the concept
of fault tolerance policy management, embedded in
FTM, with an online controller to meet users require-
ments after their applications are deployed in a given
configuration. Our approach uses the constraints de-
fined in (Jhawar et al., 2012a) to impose restrictions
on the allocations to be made on the infrastructure.
Availability and response time are often used as
standard service level agreement metrics in Cloud
computing services (Buyya et al., 2011) (De Capitani
di Vimercati et al., 2012). The well-known Brewer’s
theorem states that consistency, availability, and par-
tition tolerance are the three commonly desired prop-
erties by a distributed system, but it is impossible to
achieve all three (Gilbert and Lynch, 2002). Several
SECRYPT2013-InternationalConferenceonSecurityandCryptography
262

studies have represented availability and performance
attributes using analytical models and demonstrated
very accurate results in a time-efficient manner. (Kim
et al., 2009) presented availability models for virtual-
ized and non-virtualizedserversusing hierarchical an-
alytical models and demonstrated encouraging results
with the use of virtualization. Similar model is used
by Jhawar et al. (Jhawar and Piuri, 2012) to model
component failures at different levels in data centers,
correlation between failures, and impact boundaries.
Dynamic creation of replicas to deal with system
failures has been used before. For example, VMWare
High Availability (HA) (VMware, 2007) allow a vir-
tual machine on a failed host to be re-instantiated on
a new machine and (Pu et al., 1988) uses regenera-
tion of new data objects to account for reduction in
redundancy in the Google File System. The work
most relevant to the proposal in this paper is by Jung
et. al (Jung et al., 2010) (Jung et al., 2008) that ex-
amines how virtualization can be used to provide en-
hanced solutions to the classic problem of ensuring
high availability while maintaining performance of
multi-tier web services. Software components are re-
stored whenever failures occur and component place-
ment is managed using information about application
control flow and performance predictions. Our work
is different from the existing systems in the way we
handle system failures to create replicas and orthogo-
nally migrate them in various deployment levels in the
Cloud. Moreover, other approaches that generate new
configurations at runtime do not take into account the
placement constraints as we do in this paper.
The performance impact of resource allocation
on web applications has been studied in (Urgaonkar
et al., 2005), but it does not combine availability re-
quirements and regeneration of failed components.
Several works on dependability have highlighted the
necessity to trade-off between availability and perfor-
mance (Shin et al., 1989) (Sahai et al., 2002).
7 CONCLUSIONS
In this paper, we have highlighted that adaptive re-
source management is critical for fault tolerance of
applications in Cloud computing. We extended the
concept of fault tolerance policy management, em-
bedded in FTM (that provides fault tolerance as a ser-
vice), with an online controller to dynamically change
the replication levels and deployment configurations
in the event of system failures (e.g., server crashes and
security exploits resulting in the denial of service).
First, we formulated availability and performance of
applications using Markov chains and layered queu-
ing networks, and showed that the two attributes may
be competing with each other in a given configura-
tion. Then, using the models, we presented the online
controller that realizes a heuristics-based algorithm
to restore application’s requirements at runtime. Fi-
nally, we reported our simulation results and showed
that the online controller can significantly improvethe
availability and lower the degradation of system re-
sponse times compared to traditional static schemes.
Our future work will extend the models to a larger
scale and perform case studies on specific software
architectures in Cloud computing environments.
ACKNOWLEDGEMENTS
This work was supported in part by the Italian Min-
istry of Research within PRIN project ”GenData
2020” (2010RTFWBH), and by Google, under the
Google Research Award program.
REFERENCES
Buyya, R., Garg, S. K., and Calheiros, R. N. (2011). Sla-
oriented resource provisioning for cloud computing:
Challenges, architecture, and solutions. In Proc. of the
2011 International Conference on Cloud and Service
Computing, pages 1–10, Washington, DC, USA.
Cully, B., Lefebvre, G., Meyer, D., Feeley, M., Hutchinson,
N., and Warfield, A. (2008). Remus: high availabil-
ity via asynchronous virtual machine replication. In
Proc. of the 5th USENIX Symposium on Networked
Systems Design and Implementation, pages 161–174,
San Francisco, California.
De Capitani di Vimercati, S., Foresti, S., and Samarati, P.
(2012). Managing and accessing data in the cloud:
Privacy risks and approaches. In Proc. of the 7th Inter-
national Conference on Risks and Security of Internet
and Systems, Cork, Ireland.
Franks, G., Al-Omari, T., Woodside, M., Das, O., and De-
risavi, S. (2009). Enhanced modeling and solution
of layered queueing networks. IEEE Transactions on
Software Engineering, 35(2):148–161.
Gilbert, S. and Lynch, N. (2002). Brewer’s conjecture
and the feasibility of Consistent, Available, Partition-
tolerant web services. SIGACT News, 33(2):51–59.
Gill, P., Jain, N., and Nagappan, N. (2011). Understanding
network failures in data centers: measurement, analy-
sis, and implications. ACM Computer Communication
Review, 41(4):350–361.
Hermenier, F., Lawall, J., Menaud, J.-M., and Muller, G.
(2011). Dynamic Consolidation of Highly Available
Web Applications. Technical Report RR-7545, IN-
RIA.
Jensen, P. A. (2011). Operations Research Models
and Methods – Markov Analysis Tools. Available at
www.me.utexas.edu/jensen/ormm/excel/markov.html.
AdaptiveResourceManagementforBalancingAvailabilityandPerformanceinCloudComputing
263

Jhawar, R. and Piuri, V. (2012). Fault tolerance manage-
ment in iaas clouds. In Proc. of 2012 IEEE First
AESS European Conference on Satellite Telecommu-
nications, pages 1–6, Rome, Italy.
Jhawar, R., Piuri, V., and Samarati, P. (2012a). Support-
ing security requirements for resource management in
cloud computing. In Proc. of the 15th IEEE Interna-
tional Conference on Computational Science and En-
gineering, Paphos, Cyprus.
Jhawar, R., Piuri, V., and Santambrogio, M. (2012b). Fault
tolerance management in cloud computing: A system-
level perspective. IEEE Systems Journal, PP(99).
Jung, G., Joshi, K., Hiltunen, M., Schlichting, R., and Pu,
C. (2010). Performance and availability aware re-
generation for cloud based multitier applications. In
Proc. of 2010 IEEE/IFIP International Conference on
Dependable Systems and Networks, pages 497–506,
Chicago, IL, USA.
Jung, G., Joshi, K. R., Hiltunen, M. A., Schlichting, R. D.,
and Pu, C. (2008). Generating adaptation policies for
multi-tier applications in consolidated server environ-
ments. In Proc. of the 2008 International Conference
on Autonomic Computing, pages 23–32, Washington,
DC, USA.
Kim, S., Machida, F., and Trivedi, K. (2009). Availabil-
ity modeling and analysis of virtualized system. In
Proc. of 15th IEEE Pacific Rim International Sym-
posium on Dependable Computing, pages 365–371,
Shanghai, China.
Kopetz, H., Damm, A., Koza, C., Mulazzani, M., Schw-
abl, W., Senft, C., and Zainlinger, R. (1989). Dis-
tributed Fault-Tolerant Real-Time Systems: The Mars
Approach. IEEE Micro, 9(1):25–40.
Machida, F., Kawato, M., and Maeno, Y. (2010). Redun-
dant virtual machine placement for fault-tolerant con-
solidated server clusters. In Proc. of Network Opera-
tions and Management Symposium, pages 32–39, Os-
aka, Japan.
Pu, C., Noe, J., and Proudfoot, A. (1988). Regeneration of
replicated objects: a technique and its eden implemen-
tation. IEEE Transactions on Software Engineering,
14(7):936–945.
Qian, H., Medhi, D., and Trivedi, T. (2011). A hierar-
chical model to evaluate quality of experience of on-
line services hosted by cloud computing. In Proc.
of IFIP/IEEE International Symposium on Integrated
Network Management, pages 105–112, Dublin, Ire-
land.
Sahai, A., Machiraju, V., Sayal, M., Moorsel, A. P. A. v.,
and Casati, F. (2002). Automated sla monitoring for
web services. In Proc. of the 13th IFIP/IEEE Interna-
tional Workshop on Distributed Systems: Operations
and Management: Management Technologies for E-
Commerce and E-Business Applications, pages 28–
41, London, UK.
Samarati, P. and De Capitani di Vimercati, S. (2010). Data
protection in outsourcing scenarios: issues and direc-
tions. In Proc. of the 5th ACM Symposium on Informa-
tion, Computer and Communications Security, pages
1–14, Beijing, China.
Seiden, S. S. (2002). On the online bin packing problem.
ACM Journal, 49(5).
Shin, K., Krishna, C. M., and hang Lee, Y. (1989). Op-
timal dynamic control of resources in a distributed
system. IEEE Transactions on Software Engineering,
15(10):1188–1198.
Smith, W. E., Trivedi, K. S., Tomek, L. A., and Ackaret, J.
(2008). Availability analysis of blade server systems.
IBM Systems Journal, 47(4):621–640.
Tang, C., Steinder, M., Spreitzer, M., and Pacifici, G.
(2007). A scalable application placement controller
for enterprise data centers. In Proc. of 16th Interna-
tional conference on World Wide Web, pages 331–340,
Alberta, Canada.
Urgaonkar, B., Pacifici, G., Shenoy, P., Spreitzer, M., and
Tantawi, A. (2005). An analytical model for multi-tier
internet services and its applications. SIGMETRICS
Performance Evaluation Review, 33(1):291–302.
VMware (2007). White paper: Vmware high availability
concepts, implementation and best practices.
SECRYPT2013-InternationalConferenceonSecurityandCryptography
264
