
Model Complexity Control in Straight Line Program Genetic
Programming
C
´
esar L. Alonso
1
, Jos
´
e Luis Monta
˜
na
2
and Cruz Enrique Borges
3
1
Centro de Inteligencia Artificial, Universidad de Oviedo ,Campus de Gij
´
on, 33271 Gij
´
on, Spain
2
Departamento de Matem
´
aticas, Estad
´
ıstica y Computaci
´
on, Universidad de Cantabria, 39005 Santander, Spain
3
DeustoTech (Energy Unit), Universidad de Deust, 48007 Bilbao, Spain
Keywords:
Genetic Programming, Straight Line Program, Pfaffian Operator, Symbolic Regression.
Abstract:
In this paper we propose a tool for controlling the complexity of Genetic Programming models. The tool is
supported by the theory of Vapnik-Chervonekis dimension (VCD) and is combined with a novel representa-
tion of models named straight line program. Experimental results, implemented on conventional algebraic
structures (such as polynomials) and real problems, show that the empirical risk, penalized by suitable upper
bounds for the Vapnik-Chervonenkis dimension, gives a generalization error smaller than the use of statistical
conventional techniques such as Bayesian or Akaike information criteria.
1 INTRODUCTION
Inductive inference from examples is one of the
most studied problems in Artificial Intelligence and
has been addressed for many years using differ-
ent techniques. Among them are included statisti-
cal methods such as inference techniques, regression
and decision trees and other machine learning meth-
ods like neuronal networks and support vector ma-
chines((Tenebaum et al., 2006), (Angluin and Smith,
1983), (Gori et al., 1998), (Shaoning and Kasabov,
2004)).
In the last two decades, genetic programming
(GP) has been applied to solving problems of induc-
tive learning with some remarkable success ((Tackett
and Carmi, 1994), (Oakley, 1994), (Poli and Cagnoni,
1997), (Nikolaev and Iba, 2001)). The general pro-
cedure involves the evolution of populations of data
structures that represent models for the target func-
tion. In the evolutive process, the fitness function
for evaluating the population measures some empir-
ical error between the empirical value of the target
function and the value of the considered individual
over the sample set. Usually this fitness function must
be regularized with some term that depends on the
complexity of the model. Identifying optimal ways
to measure the complexity of the model is one of the
main goals in the process of regularization.
Most of the work devoted to develop GP strate-
gies for solving inductive learning problems makes
use of the GP-trees as data structures for represent-
ing programs (Koza, 1992). We have proposed a
new data structure named straight line program (slp)
to deal with the problem of learning by examples in
the framework of genetic programming. The slp has
a good performance in solving symbolic regression
problem instances as shown in (see (Alonso et al.,
2008)). A slp consists of a finite sequence of compu-
tational assignments. Each assignment is obtained by
applying some function (selected from a given set) to
a set of arguments that can be variables, constants or
pre-computed results. The slp structure can describe
complex computable functions using a few amount of
computational resources than GP-trees. The key point
for explaining this feature is the ability of slps for
reusing previously computed results during the eval-
uation process. Another advantage with respect to
trees is that the slp structure can describe multivari-
ate functions by selecting a number of assignments as
the output set. Hence one single slp has the same rep-
resentation capacity as a forest of trees. We study the
practical performance of ad-hoc recombination oper-
ators for slps and we apply the slp- based GP ap-
proach to regression. In addition we study the Vapnik-
Chervonekis dimension of slps representing models.
We consider families of slp’s constructed from a set
of Pfaffian functions. Pfaffian functions are solutions
of triangular systems of first order partial differen-
25
L. Alonso C., Luis Montaña J. and Enrique Borges C..
Model Complexity Control in Straight Line Program Genetic Programming.
DOI: 10.5220/0004554100250036
In Proceedings of the 5th International Joint Conference on Computational Intelligence (ECTA-2013), pages 25-36
ISBN: 978-989-8565-77-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

tial equations with polynomial coefficients. As ex-
amples, polynomials, exponential functions, trigono-
metric functions on some particular intervals and, in
general, analytic algebraic functions are Pfaffian. The
main outcome of this work is a penalty term for the
fitness function of a genetic programming strategy
based on slp’s to solve inductive learning problems.
Experimental results point out that the slp structure,
if suitably regularized, may result in a robust tool for
supervised learning.
2 STRAIGHT LINE PROGRAM
GENETIC PROGRAMMING
Straight line programs have a large history in the
field of Computational Algebra. A particular class
of straight line programs, known in the literature as
arithmetic circuits, constitutes the underlying compu-
tation model in Algebraic Complexity Theory ((Bur-
guisser et al., 1997)). Arithmetic circuits with the
standard arithmetic operations {+,−,∗,/} are the
natural model of computation for studying the com-
putational complexity of algorithms solving problems
with an algebraic flavor. They have been used in lin-
ear algebra problems ((Berkowitz, 1984)), in quan-
tifier elimination ((Heintz et al., 1990)) and in alge-
braic geometry ((Giusti and Heinz, 1993) and (Giusti
et al., 1997)). Also, slp’s constitute a promising alter-
native to the trees in the field of Genetic Programming
(see (Alonso et al., 2008)). The formal definition of
the straight line program structure is as follows: Let
F = {f
1
,..., f
n
} be a set of functions, where f
i
has
arity a
i
, for 1 ≤i ≤ n, and let T = {t
1
,...,t
m
} be a set
of terminals. A straight line program (slp) over F and
T is a finite sequence of computational instructions
Γ = {I
1
,...,I
l
} where
I
k
≡ u
k
:= f
j
k
(α
1
,...,α
a
j
k
); with f
j
k
∈ F,
α
i
∈T for all i if k = 1 and α
i
∈T ∪{u
1
,...,u
k−1
} for
1 < k ≤ l.
Terminal set T is of the form T = V ∪C, where
V = {x
1
,...,x
n
} is a finite set of variables and C =
{c
1
,...,c
q
} is a finite set of constants. The number of
instructions l is the length of Γ.
Note that if we consider the sl p Γ as the code of a
program, then a new variable u
i
is introduced at each
instruction I
i
. We will denote by Γ = {u
1
,...,u
l
} a
slp. Each of the non-terminal variables u
i
can be con-
sidered as an expression over the set of terminals T
constructed by a sequence of recursive compositions
from the set of functions F. The set of all slp’s over F
and T is denoted by SLP(F,T ).
An output set of a slp Γ = {u
1
,...,u
l
} is any
set of non-terminal variables of Γ, that is, O(Γ) =
{u
i
1
,...,u
i
t
}, i
1
< ··· < i
t
. Provided that V =
{x
1
,...,x
p
} ⊂ T is the set of terminal variables, the
function computed by Γ, denoted by Φ
Γ
: I
p
→ O
t
,
is defined recursively in the natural way and satisfies
Φ
Γ
(a
1
,...,a
p
) = (b
1
,...,b
t
), where b
j
stands for the
value of the expression over V of the non-terminal
variable u
i
j
when we replace the variable x
k
with a
k
;
1 ≤ k ≤ p.
For computing the initial population, the well
known methods for trees (see (Koza, 1992)) can be
easily adapted to slp’s. In order to compute the fitness
function in a GP process to solve a particular prob-
lem, the computation of the function Φ
Γ
, considering
its own definition, would be often necessary.
2.1 SLP Crossover and Mutation
For slp-GP, 1-point crossover and in general k-point
crossover are easily defined. However, a new spe-
cific crossover operation that produces another type of
information exchange between the two selected par-
ents, has been designed. The objective is to carry
subexpressions from one parent to the other. A subex-
pression is captured by an instruction u
i
and all the
instructions that are used to compute the expression
over the set of terminals represented by u
i
. Now fol-
lows a description of this crossover with a clarifying
example.
Given two slp’s, Γ
1
and Γ
2
, first a position k en Γ
1
is randomly selected. Let S
u
k
be the set of all instruc-
tions related to the computation of the subexpression
associated to node u
k
. We obtain the first offspring by
randomly selecting an allowed position t in Γ
2
and
making the substitution of a part of its instructions by
those instructions in S
u
k
suitably renamed. For the
second offspring we symmetrically repeat the strat-
egy.
Example: Consider F = {∗,+}, L = 5 and T =
{x,y}. Let Γ
1
and Γ
2
be the following two slp’s:
Γ
1
≡
u
1
:= x + y
u
2
:= u
1
∗u
1
u
3
:= u
1
∗x
u
4
:= u
3
+ u
2
u
5
:= u
3
∗u
2
Γ
2
≡
u
1
:= x ∗x
u
2
:= u
1
+ y
u
3
:= u
1
+ x
u
4
:= u
2
∗x
u
5
:= u
1
+ u
4
If k = 3 then S
u
3
= {u
1
,u
3
}, and t must be selected in
{2,...,5}. If for instance t = 3, then the first offspring
is as follows.
Γ
0
1
≡
u
1
:= x ∗x
u
2
:= x + y
u
3
:= u
2
∗x
u
4
:= u
2
∗x
u
5
:= u
1
+ u
4
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
26

For the second offspring, if the selected position in Γ
2
is k
0
= 4, then S
u
4
= {u
1
,u
2
,u
4
}. Now if t = 5, then
the offspring will be
Γ
0
2
≡
u
1
:= x + y
u
2
:= u
1
∗u
1
u
3
:= x ∗x
u
4
:= u
3
+ y
u
5
:= u
4
∗x
The mutation operation in the slp structure con-
sists of a change in one of the instructions. This
change can be either the substitution of the complete
instruction by another one randomly generated, or a
little modification of just one of the arguments of the
function in F that defines the instruction.
3 PFAFFIAN FUNCTIONS AND
VCD OF FORMULAS
In this section we introduce some tools concerning the
geometry of sets defined by boolean combinations of
sign conditions over Pfaffian functions (semi-Pfaffian
sets in the mathematical literature). A complete sur-
vey on the subject is due to Gabrielov and Vorobjov
((Gabrielov and Vorobjov, 2004)).
Definition: Let U ⊂ R
n
be an open domain. A Pfaf-
fian chain of length q ≥ 1 and degree D ≥ 1 in U is
a sequence of real analytic functions f
1
,..., f
q
in U
satisfying a system of differential equations
∂ f
i
∂x
j
= P
i, j
(x, f
1
(x),..., f
i
(x)) (1)
for i = 1,... q where P
i, j
∈R[x, y
1
,...,y
i
] are polyno-
mials of degree at most D and x = x
1
, . . . , x
n
.
A function f on U is called a Pfaffian of order q
and degree (D,d) if
f (x) = P(x, f
1
(x),..., f
q
(x)) (2)
where P ∈R[x, y
1
, . . . , y
q
] is a polynomial of degree at
most d ≥ 1 and f
1
,..., f
q
is a Pfaffian chain of length
q and degree D.
The following functions are Pfaffian: sin(x), de-
fined on the interval (−π + 2πr,π + 2πr); tan(x), de-
fined on the interval (−π/2+πr,π/2+πr); e
x
defined
in R; log x defined on x > 0; 1/x defined on x 6= 0.
√
x
defined on x ≥ 0. More generally, analytic algebraic
functions are Pfaffian.
Definition: Let F be a class of subsets of a set X.
We say that F shatters a set A ⊂X if for every subset
E ⊂ A there exists S ∈ F such that E = S ∩A. The
VCD of F is the cardinality of the largest set that is
shattered by F .
Next we announce an upper bound for the VCD
of a family of concept classes whose membership
tests are computed by straight line programs involv-
ing Pfaffian operators over the real numbers. An im-
portant new issue is that we do not consider an up-
per bound for the length of the slp’s. In previous re-
sults about VCD of programs or families of compu-
tation trees, a time bound approximated by the num-
ber of steps of the program execution or by the height
of the computation tree is needed ((Golberg and Jer-
rum, 1995). In our case we only need a bound for
the number of the non-scalar slp’s instructions. Those
are instructions involving operations which are not in
{+,−}.
A rough estimation of the VC dimension of slps
using Pfaffian operators can be obtained computing
the number of free parameters in families of slps with
bounded non-scalar complexity. To do this let T =
{t
1
,...,t
n
}be a set of terminals and let F = {+,−∗,/,
sign}∪{f
1
,..., f
q
} be a set of functions, where the
elements f
i
constitute a Pfaffian chain of length q with
arities bounded by A and the sign function is defined
as sign(x) = 1 if x > 0 and 0 otherwise.
Let Γ
n,L
be the collection of sl p
0
s Γ over F and
T using at most L non-scalar operations and a free
number of scalar operations. Then, the number of free
parameters of a universal slp Γ
U
that parameterizes
the elements of the family Γ
n,L
is exactly:
N := L[3 + q + A(n +
L −1
2
) + 1] + n (3)
The proof is as follows. Introduce a set of parame-
ters α, β and γ taking values in Z
k
for a suitable natural
number k, such that each slp in the family can be ob-
tained specializing the parameters. For this purpose
we define u
−n+m
= t
m
, for 1 ≤ m ≤ n. Note that any
non-scalar assignment u
i
, 1 ≤ i ≤L in a slp Γ belong-
ing to Γ
n,L
is a function of t = (t
1
,...,t
n
) that can be
parameterized as follows:
u
i
= U
i
(α,β,γ)(t) =
γ
i
−n
[α
i
−n
(
i−1
∑
j=−n+1
α
j
i
1
u
j
) ∗(
i−1
∑
j=−n+1
α
j
i
2
u
j
)+
+(1 −α
i
−n
)[β
i
−n
∑
i−1
j=−n+1
α
j
i
1
u
j
∑
i−1
j=−n+1
α
j
i
2
u
j
+
+(1 −β
i
−n
)sgn(
i−1
∑
j=−n+1
α
j
i
1
u
j
)]]+
+(1 −γ
i
−n
)[
q
∑
k=1
γ
i
k
f
k
(
i−1
∑
j=−n+1
α
j
i
1
u
j
,... ,
i−1
∑
j=−n+1
α
j
i
A
u
j
)]
Now considering the last assignment as the output set
of the slp Γ, this last assignment is parameterized as:
ModelComplexityControlinStraightLineProgramGeneticProgramming
27

U =
L
∑
j=−n+1
α
j
u
j
where u
j
, 1 ≤ j ≤ L are the non-scalar assignments.
Finally counting the number of introduced param-
eters we will obtain Equation 3. The estimation given
in Equation 3 can be converted, after certain alge-
braic manipulations, into an upper bound using the-
ory of Pfaffian operators (see (Gabrielov and Vorob-
jov, 2004). We omit the proof due to lack of space.
Main Theorem. Let Γ
L,n
the set of slps with n vari-
ables, at most L non-scalar operations, using opera-
tors in F that contains the operations {+,−,∗,/,sign}
and Pfaffian operations f , where each f belongs to
a fixed Pfaffian chain {f
1
,..., f
q
} of length q and
degree D ≥ 2. Let N be as in Equation 3. Then,
the Vapnik-Chervonenkis dimension of C
k,n
is in the
class:
O((q(N + n))
2
+ (N + n)(L + q)
log
2
((N + n)(L + 1)(4 + D)))
(4)
Simplification. If we consider as constants parame-
ters n, q, D and d, the VCD of the class is at most
O(L
4
). This quantity gives an idea of the asymptotic
maximum order of VCD of common classes of GP-
models. We point out that this quantity is an upper
bound and, possibly, far from being an optimal bound,
but it can be used as starting point in further experi-
mental developments.
4 MODEL SELECTION
CRITERION
In supervised learning problems like regression and
classification a considerable amount of effort has been
done for obtaining good generalization error bounds.
The results by Vapnik (see (Vapnik, 1998)) state the
following error bound:
ε( f ) ≤ ε
m
( f ) +
r
h(log(2m/h) + 1) −log(η/4)
m
,
(5)
where h must be substituted by the upper bound of the
VCD of the hypothesis class that contains the model
f , η is the probability that the error bound is violated
and m is the sample size. As usual in this context
ε( f ) and ε
m
( f ) stand, respectively, for the true mean
square error and the empirical mean square error of
the model f .
In our case, f will be represented by a straight
line program Γ ∈ SLP(F,T ) where T contains n vari-
ables and F contains the operations on real numbers
{+,−,∗,/,sign} and Pfaffian operations over the re-
als. Note that the sets F and T are invariants through-
out the model selection process. Hence, the search
space of models forms a nested structure:
C
1
⊂C
2
⊂ ··· ⊂C
L
⊂ ···
where C
L
represents the class of slp’s in SLP(F,T )
that have at most L non-scalar instructions. In this
situation we will finally choose the model that mini-
mizes the right side of Equation 5.
5 EXPERIMENTAL RESULTS
In this section we present the obtained results after
an experimental phase in which symbolic regression
problem instances were solved using the selection cri-
terion described in the previous section. Our proposal
is to consider straight line programs with Pfaffian in-
structions as the structure that represents the model.
Then a GP algorithm is executed considering the re-
combination operators for slp’s described in Section
2 and with fitness regularization function expressed
in Equation 5. So we propose a model estimation
via structural risk minimization (SRM). For the com-
plexity measure h of the model, we will use the VCD
bound in 3.
We will consider additive gaussian noise in the
sample set z = (x
i
,y
i
)
1≤i≤m
. Hence, for a target func-
tion g, the sample set verifies: y
i
= g(x
i
) + ε, where ε
is independent and identically distributed (i.i.d.) zero
mean random error.
We will compare the effectiveness of the VCD
fitness regularization method (VCD-SRM) with two
well known representative statistical methods with
different penalization terms:
• Akaike Information Criterion (AIC) which is as
follows (see (Akaike, 1970)):
ε( f ) = ε
m
( f ) +
2h
m
σ
2
(6)
• Bayesian Information Criterion (BIC) (see
(Bernadro and Smith, 1994)):
ε( f ) = ε
m
( f ) + (ln m)
h
m
σ
2
(7)
In the above expressions h stands for the number
of free parameters of the model (Equation 3).
For measuring the quality of the final selected
model, we have considered a new set of unseen points,
generated without noise from the target function. This
new set of examples is known as the test set or vali-
dation set. So, let (x
i
,y
i
)
1≤i≤n
test
a validation set for
the target function g(x) (i.e. y
i
= g(x
i
)) and let f (x)
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
28

be the model estimated from the training data. Then
the prediction risk ε
n
test
is defined by the mean square
error between the values of f and the true values of
the target function g over the validation set:
ε
n
test
=
1
n
test
n
test
∑
i=1
( f (x
i
) −y
i
)
2
(8)
5.1 First Experiment
For the first experiment we have considered a set of
500 multivariate polynomials with real coefficients
whose degrees are bounded by 5. The number of vari-
ables varies from 1 to 5 with 100 polynomials for each
case. A second experiment was also performed solv-
ing symbolic regression problem instances associated
to a new set of specific multivariate functions Finally
a third experiment was performed considering some
well known real benchmark problems. In all cases,
when the GP process finishes, the best individual is
selected as the proposed model for the corresponding
target function.
We shall denote the set of polynomials as
P
n
R
[X] with X = (x
1
,...,x
n
), 1 ≤ n ≤ 5 and x
i
∈
[−1,1] ∀i. The individuals are slp’s over F =
{+,−,∗,/,sqrt,sin,cos,exp}. In order to avoid errors
generated by divisions by zero, instead of the tradi-
tional division we will use in our computation the op-
eration usually named ”protected division”, that re-
turns 1 if the denominator is zero. Besides the vari-
ables x
i
, the terminal set also includes five constants
c
i
, 1 ≤i ≤5, randomly generated in [−1,1]. Observe
that although the target functions are polynomials, our
set F not only contains the operators of sum, dif-
ference and product, but also contains other Pfaffian
functions. This situation increments considerably the
search space. Nevertheless, note that in a real problem
situation usually we do not know if the target function
is a polynomial or not.
The parameters for the GP process are the fol-
lowing: population size M = 200, probability of
crossover p
c
= 0,9, probability of mutation p
m
=
0,05, and tournament selection of size 5. The real
length of the slp’s in the population is bounded by 40.
Elitism and a particular generational replacement are
used. In this sense, the offsprings do not necessar-
ily replace their parents. After a crossover we have
four individuals: two parents and two offsprings. We
select the two best individuals with different fitness
values. The motivation is to prevent premature con-
vergence and to maintain diversity in the population.
As we are considering multivariate polynomials
as target functions, the difficulty of the problem in-
stance increases with the number of variables. Hence,
to vary the size of the sample set as a function of
AIC BIC VCD
0.0 0.2 0.4 0.6 0.8
rmpol1
AIC BIC VCD
0.5 1.0 1.5 2.0 2.5 3.0
rmpol2
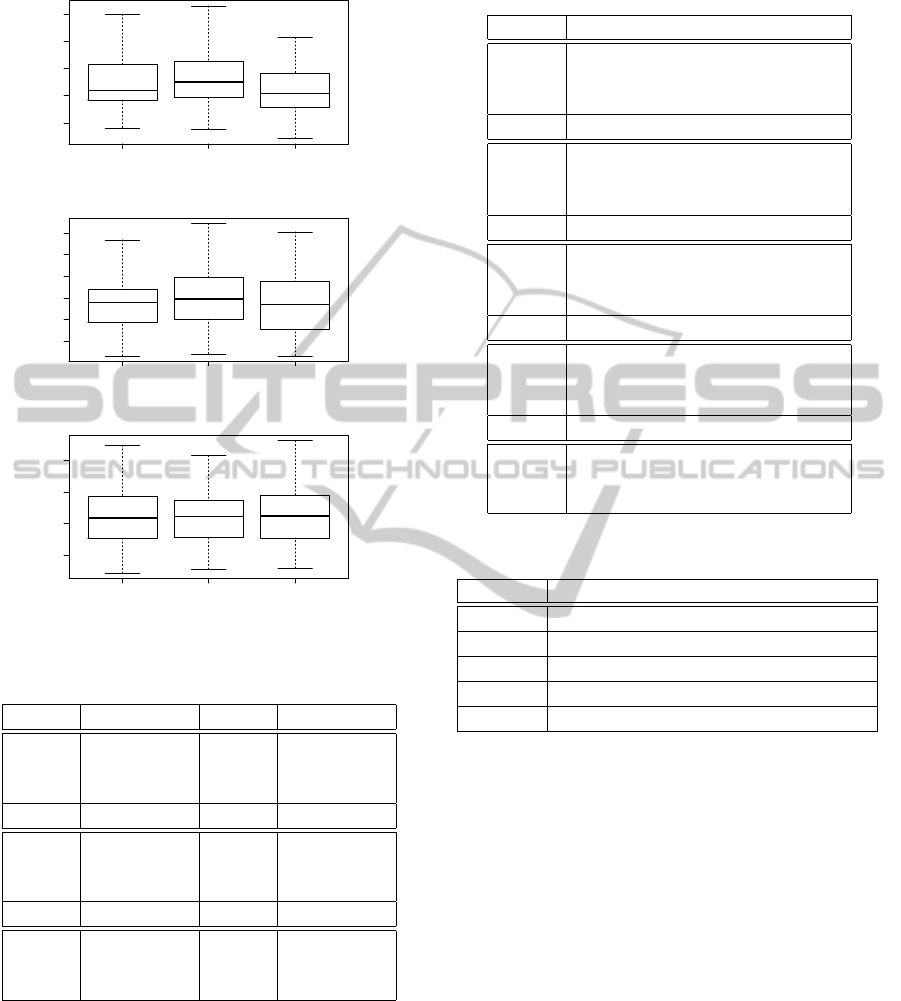
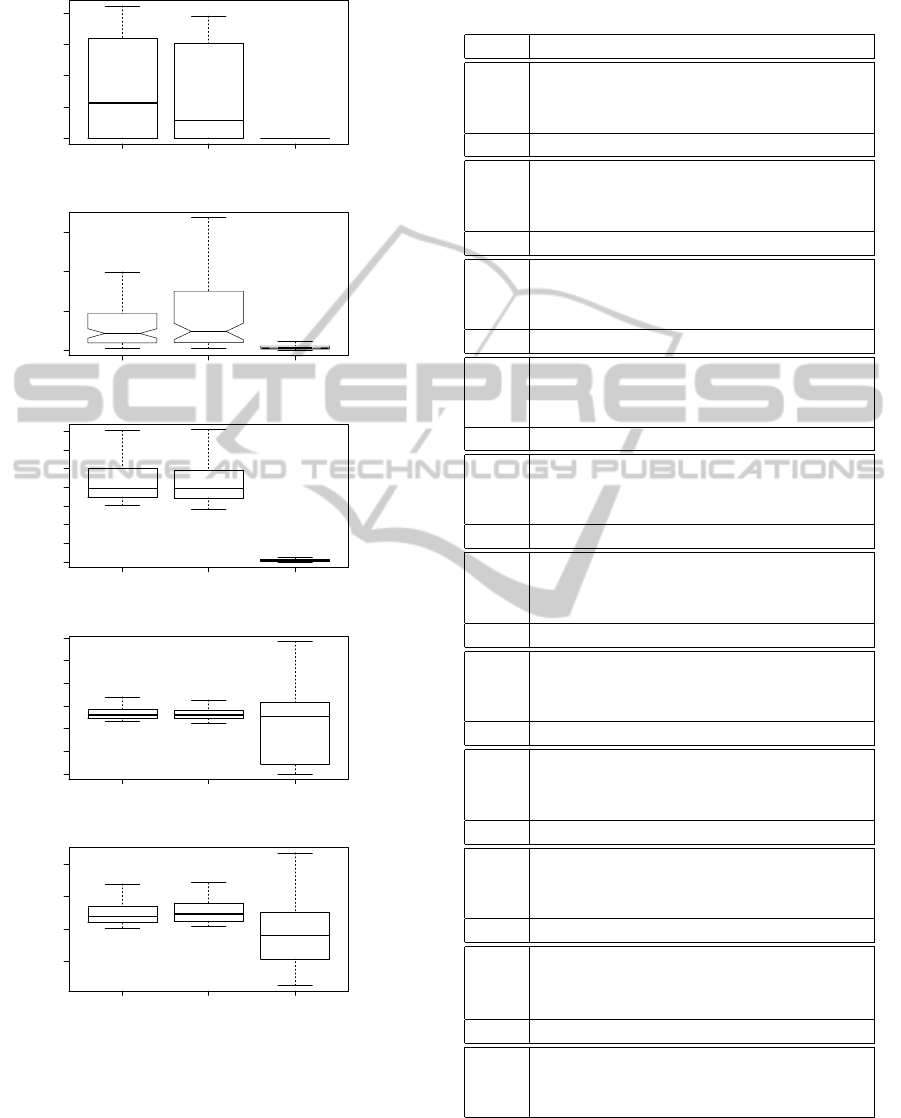
Figure 1: Empirical distribution of the executions, for the
univariate and bivariate polynomials.
the number of variables is a reasonable decission.
Note that an upper bound for the number of mono-
mials in a polynomial with n variables and degree d
is 4 ·d
n+1
and this is also a quite good estimation for
a lower bound of the size of the sample set. Thus,
in our case we have considered sample sets of size
4 ·5
n+1
, 1 ≤ n ≤ 5. In this experiment one execution
for each strategy has been performed over the 500
generated target functions. In every execution the pro-
cess finishes after 250 generations were completed.
Finally, the validation set consists of a number of un-
seen points that is equal to two times the size of the
sample set.
Figures 1 and 2 represent the empirical distribu-
tion of the executions of the three compared strategies
over the sets of polynomials. We have separated the
polynomial sets by the number of variables, from one
to five. These empirical distributions are displayed us-
ing standard box plot notation with marks at the best
execution, 25%, 50%, 75% and the worst execution,
always considering the prediction risk of the selected
model, represented on the y-axis and defined by the
mean square error between the values of the model
and the true values of the target function over the val-
idation set. We also include tables that show means
and variances as well as the prediction risk of the best
obtained model for each method.
As we can see from the above figures and tables,
it seems that VCD regularization performs better than
the well known regularization methods AIC and BIC.
This is more clear for the polynomials up to three vari-
ables and not so clear for the rest of the polynomial
ModelComplexityControlinStraightLineProgramGeneticProgramming
29
AIC BIC VCD
1 2 3 4 5
rmpol3
AIC BIC VCD
3 4 5 6 7 8
rmpol4
AIC BIC VCD
6 8 10 12
rmpol5
Figure 2: Empirical distributions of the executions, for the
multivariate polynomials with 3, 4, and 5 variables.
Table 1: Values of means and variances.
P
1
R
[X] µ σ P
2
R
[X] µ σ
AIC 0.39 0.42 AIC 1.17 0.86
BIC 0.38 0.41 BIC 1.25 0.85
VCD 0.24 0.27 VCD 0.82 0.54
P
3
R
[X] µ σ P
4
R
[X] µ σ
AIC 2.62 1.28 AIC 4.79 1.49
BIC 2.89 1.57 BIC 5.08 1.74
VCD 2.24 0.85 VCD 4.76 1.43
P
5
R
[X] µ σ
AIC 8.51 2
BIC 8.63 2.16
VCD 8.63 2.17
sets. This could be because for polynomials with four
and five variables, as they constitute more complex
problem instances, it would be necessary a large num-
ber of generations in the evolutive process. In order to
confirm the comparative results of the studied strate-
gies we have made crossed statistical hypothesis tests.
The obtained results are showed in Table 2. Roughly
speaking, the null-hypothesis in each test with asso-
Table 2: Results of the crossed statistical hypothesis tests
about the comparative quality of the studied strategies.
P
1
R
[X] AIC BIC VCD
AIC 0.91 1
BIC 0.30 1
VCD 3.93 ·10
−4
1.1 ·10
−3
P
2
R
[X] AIC BIC VCD
AIC 3.91 ·10
−2
1
BIC 0.96 1
VCD 1.86 ·10
−5
1.12 ·10
−7
P
3
R
[X] AIC BIC VCD
AIC 7.7 ·10
−2
0.99
BIC 0.99 1
VCD 1.2 ·10
−2
3.93 ·10
−4
P
4
R
[X] AIC BIC VCD
AIC 0.12 0.90
BIC 0.77 0.99
VCD 0.27 2.7 ·10
−3
P
5
R
[X] AIC BIC VCD
AIC 0.44 0.52
BIC 0.77 0.78
VCD 0.61 0.37
Table 3: Prediction risk of the model obtained from the best
execution.
Instance AIC BIC VCD
P
1
R
[X] 3.40 ·10
−2
3.44 ·10
−2
4.32 ·10
−3
P
2
R
[X] 0.20 0.19 0.22
P
3
R
[X] 0.82 0.77 0.42
P
4
R
[X] 2.33 2.43 2.33
P
5
R
[X] 4.88 5.13 5.20
ciated pair (i, j) is that strategy i is not better than
strategy j. Hence if value a
i j
in Table 2 is less than a
significance value α, we can reject the corresponding
null-hypothesis.
Taking into account the results of the crossed sta-
tistical hypothesis tests with a significance value α =
0.05, we can confirm that our proposed regulariza-
tion method based on the VC dimension of families
of SLP’s is the best of the studied strategies for the
considered sets of multivariate polynomials.
5.2 Second Experiment
In this case we have run the algorithms on instances
associated to three groups of target functions. The
first group consists of the following three polynomial
functions. In all functions the variables take values in
the range [−100,100].
F(x,y,z) = (x + y + z)
2
+ 1 (9)
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
30
G(x,y,z) =
1
2
x +
1
3
y +
2
3
z (10)
K(x,y,z,w) =
1
2
x +
1
4
y +
1
6
z +
1
8
w (11)
The second group includes also three functions
g
1
(x) =
4x
2
(3 −4x) x ∈[0,0.5]
(4/3)x(4x
2
−10x + 7) −3/2 x ∈(0.5,0.75]
(16/3)x(x −1)
2
x ∈(0.75,1]
(12)
g
2
(x) = sin
2
(2πx), x ∈ [0, 1] (13)
g
3
(x) =
sin
q
x
2
1
+ x
2
2
x
2
1
+ x
2
2
, x
1
, x
2
∈ [−5, 5] (14)
Finally, the third group of target functions is con-
stituted by five unary functions of several classes:
trigonometric functions, polynomial functions and
one exponential function. These functions are the fol-
lowing
f
1
(x) = x
4
+ x
3
+ x
2
+ x x ∈[−15,15]
f
2
(x) = e
−sin 3x+2x
x ∈[−
π
2
,
π
2
]
f
3
(x) = e x
2
+ π x x ∈[−π,π]
f
4
(x) = cos(2x) x ∈[−π,π]
f
5
(x) = min{
2
x
,sin(x) + 1} x ∈[0,15]
(15)
The parameters of the algorithms related with the
population size, selection, recombination operators
and termination condition at 250 generations, are the
same as those fixed for the first experiment. Other-
wise, for the problem instances associated to the func-
tions of this second experiment, the upper bound for
the length of the slp’s is 16, the sample set has 30
points and the validation set is of size 200.
The corresponding sets of functions and terminals
for each target function are showed in Table 4. In all
cases the constants c
i
are randomly generated in [0,1].
We have performed 100 executions of the three com-
pared methods for each problem instance. The results
presented in the following figures and tables are the
same as those displayed for the first experiment.
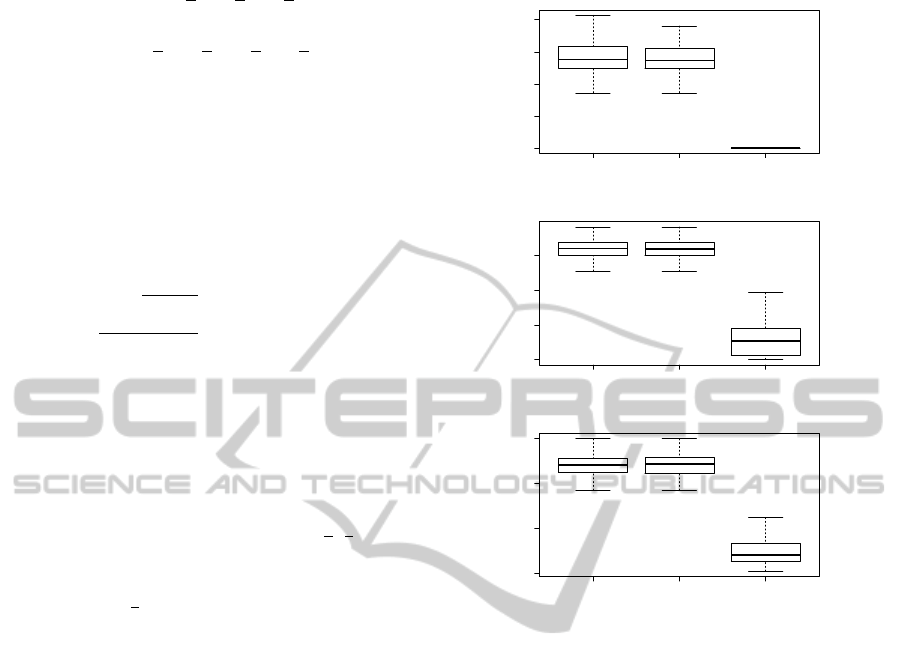
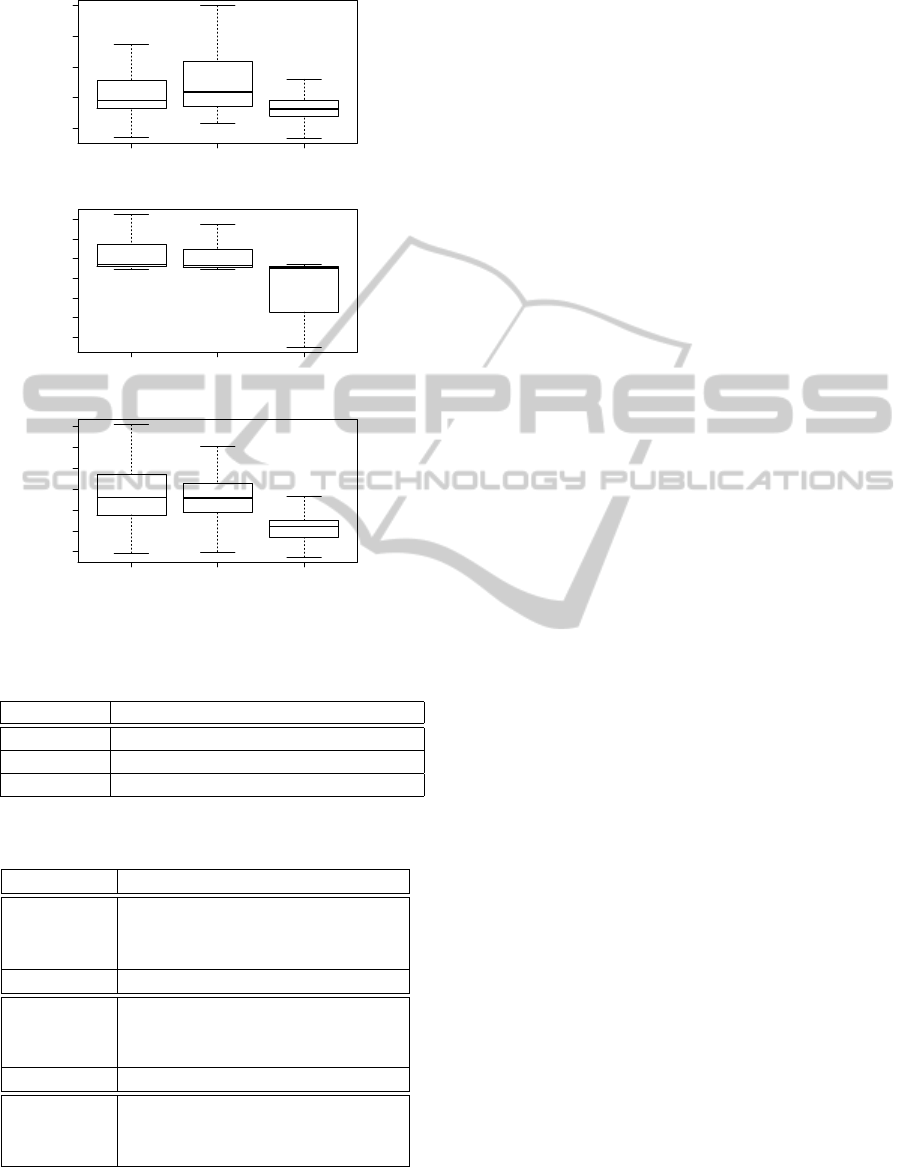
Analyzing the empirical distribution of the execu-
tions, the VCD regularization method is clearly the
best one for all target functions of the first and third
group. There are very significative differences in the
performance, specially for the functions of the first
group, where the AIC and BIC methods found no
good solutions in any of the 100 executions. However
the three compared methods have a similar perfor-
mance over the target functions of the second group.
In fact, in the case of the bivariate function g
3
our
VCD regularization seems to be worse than AIC and
AIC BIC VCD
0e+00 1e+08 2e+08 3e+08 4e+08
F
AIC BIC VCD
0 500 1000 1500
G
AIC BIC VCD
0 500 1000 1500
K
Figure 3: Empirical distribution of the executions. Second
Experiment, first group of functions.
BIC. Considering that g
1
is a discontinuous piecewise
polynomial function, g
2
is a sine −square function
and g
3
is a two-dimensional sin function we could
conjecture that for noisy problem instances associated
with trigonometric or discontinuous target functions
the outperformance of the VCD method is not so clear
as it is for polynomial target functions. A similar sit-
uation occurs for the trigonometric functions of the
third group f
4
and f
5
. On the other hand, AIC and BIC
methods always perform quite similar. This could be
because both associated fitness functions (equations 6
and 7) take the same structure with very similar addi-
tive penalization terms.
The results displayed in Tables 5 and 6 agree with
the above comments about the comparative study of
the three methods. Note that VCD regularization ob-
tains the lowest mean prediction risk for almost all the
proposed target functions.
The crossed statistical hypothesis tests showed in
Table 7 confirm VCD as the best method for the prob-
lem instances associated to the functions of the first
and the third group.
ModelComplexityControlinStraightLineProgramGeneticProgramming
31
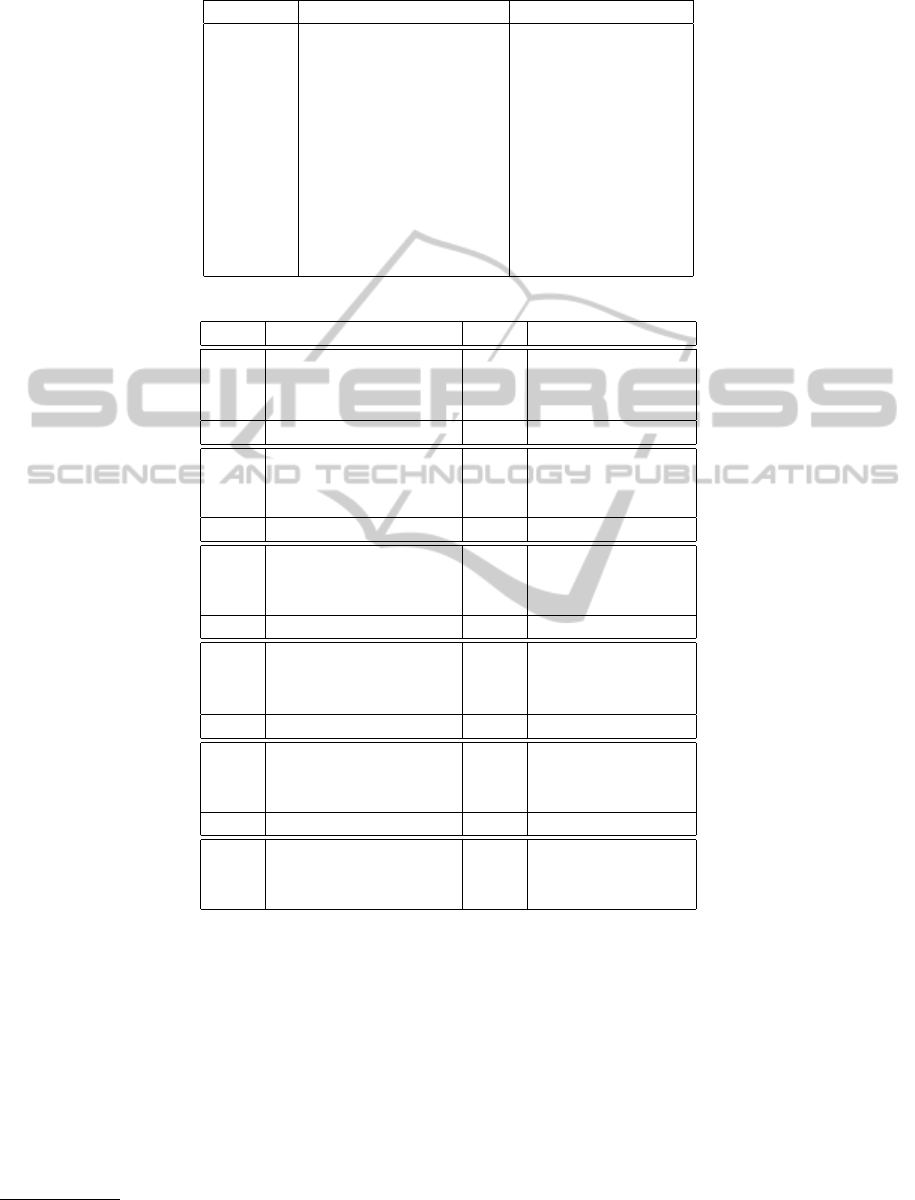
Table 4: Function set and terminal set for the functions. F = {+, −,∗, /}.
Function Function set Terminal set
F F {x,y,z}
G F {x,y,z,c
1
,...,c
6
}
K F {x,y,z, w,c
1
,...,c
6
}
g
1
F ∪{sign} {x,c
1
,...,c
5
}
g
2
F ∪{sin} {x,c
1
,...,c
5
}
g
3
F ∪{sqrt,sin} {x
1
,x
2
,c
1
,...,c
5
}
f
1
F ∪{sqrt} {x}
f
2
F ∪{sqrt,sin,cos,exp} {x,c
1
}
f
3
F ∪{sin, cos} {x,c
1
}
f
4
F ∪{sqrt,sin} {x,c
1
}
f
5
F ∪{sin, cos} {x,c
1
}
Table 5: Values of means and variances: second experiment.
F µ σ G µ σ
AIC 2.83 ·10
8
5.3 ·10
7
AIC 1627.1 236.87
BIC 2.74 ·10
8
4.12 ·10
7
BIC 1612.58 217.41
VCD 0 0 VCD 314.15 293.55
K µ σ g
1
µ σ
AIC 1199.14 107.03 AIC 0.15 0.06
BIC 1203.45 110.30 BIC 0.15 0.06
VCD 237.78 170.13 VCD 0.13 0.19
g
2
µ σ g
3
µ σ
AIC 0.21 0.06 AIC 0.20 0.15
BIC 0.21 0.06 BIC 0.20 0.15
VCD 0.20 0.06 VCD 0.37 0.33
f
1
µ σ f
2
µ σ
AIC 7.6 ·10
5
7.8 ·10
5
AIC 34.3 34.4
BIC 7.5 ·10
5
7.6 ·10
5
BIC 44.76 44.92
VCD 11.23 27.01 VCD 4.99 5.49
f
3
µ σ f
4
µ σ
AIC 84.33 20 AIC 0.54 0.11
BIC 81.35 18.87 BIC 0.54 0.09
VCD 1.53 1.90 VCD 0.43 0.32
f
5
µ σ
AIC 0.49 0.08
BIC 0.50 0.07
VCD 0.36 0.19
5.3 Third Experiment
We have executed the described evolutionary pro-
cesses over some sample sets obtained from the
KEEL-dataset repository (see (Alcal
´
a-Fdez et al.,
2011)
1
). KEEL-dataset includes sets of sample
points for problems of different categories. We have
selected three data sets corresponding to the follow-
ing regression problems: Abalone, that consists in the
prediction of the age of these molluscs from physical
1
http://www.keel.es
measurements; Ailerons, which addresses a control
problem, flying a F16 aircraft and AutoMPG8, where
the objective is to predict fuel consumption of a city
cycle. The respective sizes of the data sets are 4177,
13750 and 392. We consider the same general config-
uration parameters and slp’s of length bounded by 16.
The set of functions consists of all the functions pre-
viously considered in this work and the terminal set
contains the variables and a number of constants that
equals the number of variables for each problem. That
is 8 for Abalone, 40 for Ailerons and 7 for AutoMPG8.
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
32
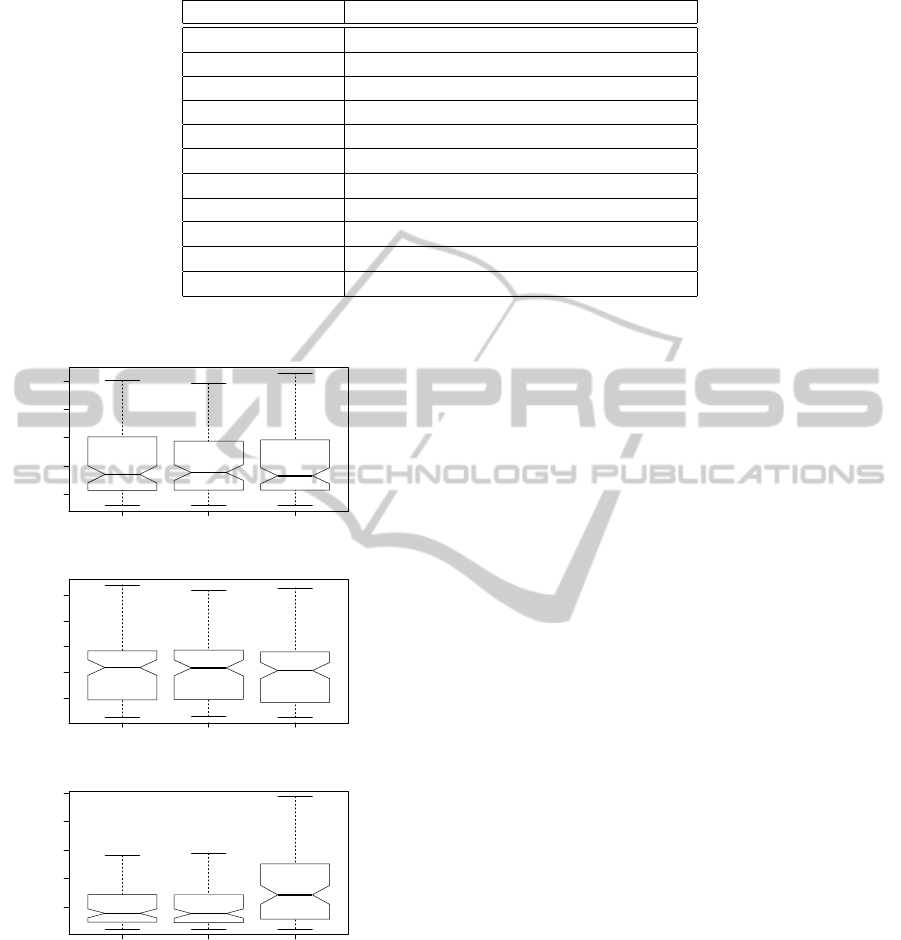
Table 6: Prediction risk of the model obtained from the best execution: second experiment
.
Problem instance AIC BIC VCD
F 1.7 ·10
8
1.7 ·10
8
0
G 1272.03 1266.42 0,69
K 917.83 917.67 17.46
g
1
7.91 ·10
−2
7.93 ·10
−2
7.91 ·10
−2
g
2
0.11 0.11 0.11
g
3
4.53 ·10
−2
4.71 ·10
−2
4.75 ·10
−2
f
1
3.02 ·10
−24
3.24 ·10
−24
2.26 ·10
−24
f
2
2.43 2.17 0.17
f
3
60.38 56.06 2.77 ·10
−2
f
4
5.5 ·10
−3
1,1 ·10
−2
9.9 ·10
−4
f
5
0,15 0.42 5.03 ·10
−2
AIC BIC SRM
0.10 0.15 0.20 0.25 0.30
g1
AIC BIC SRM
0.15 0.20 0.25 0.30 0.35
g2
AIC BIC SRM
0.2 0.4 0.6 0.8 1.0
g3
Figure 4: Empirical distribution of the executions. Second
Experiment, second group of functions.
In all cases, and for each execution, we have divided
the data sets into two equal parts: one of them was
considered as the set of examples and the other was
used as the validation set. Note that in this experiment
the examples are not corrupted by noise. As usually,
we have performed 100 executions for each problem
instance and method.
Nevertheless the 40 variables that has Ailerons
problem, it seems to be the most easy one, as opti-
mal solutions in almost all executions were obtained
for the three methods. For the other two problems the
studied methods also perform quite well. For these se-
lected real problem instances the VCD regularization
method is clearly better than the other two, as we can
see considering the empirical distribution showed in
figure 6. The results of the crossed statistical hypoth-
esis tests with a significance value α = 0.05 confirm
the above affirmation.
6 CONCLUSIONS
Straight line programs constitute a promising struc-
ture for representing models in the Genetic Program-
ming framework. Indeed, as it was published in a
previous work, slp’s outperform the traditional tree
structure when GP strategies are applied for some
kind of regression problems. In this paper we try to
control the complexity of populations of slp’s while
they evolve in order to find good models for solving
symbolic regression problem instances. The evolv-
ing structure is constructed from a set of functions
that contains Pfaffian operators. We have considered
the Vapnik Chervonenkis dimension as a complexity
measure and we have found a theoretical upper bound
of the VCD of families of slp’s over Pfaffian opera-
tors as an important generalization of similar results
for more simple sets of operators including rational
functions. This theoretical upper bound is polyno-
mial in the number of the non-scalar instructions of
the family of the slp’s. As a consequence of the main
result, we propose a regularized fitness function in-
cluded in a evolutionary strategy for solving symbolic
regression problem instances. We have compared our
fitness function based on the VCD upper bound with
two well known statistical penalization criteria. The
ModelComplexityControlinStraightLineProgramGeneticProgramming
33
AIC BIC VCD
0 500000 1500000
f1
AIC BIC SRM
0 50 100 150
f2
AIC BIC VCD
0 20 40 60 80 100 140
f3
AIC BIC VCD
0.0 0.2 0.4 0.6 0.8 1.0 1.2
f4
AIC BIC VCD
0.2 0.4 0.6 0.8
f5
Figure 5: Empirical distribution of the executions. Second
Experimente, third group of functions.
experimental results obtained after the execution of
the compared strategies over three different groups of
target functions, show that our proposed complexity
measure and its corresponding penalization criterion
is better than the others in almost all studied situa-
Table 7: Results of the crossed statistical hypothesis tests
about the comparative quality of the studied strategies. Sec-
ond experiment functions.
F AIC BIC VCD
AIC 0.96 1
BIC 0.2 0.96
VCD 3.7 ·10
−44
3.7 ·10
−44
G AIC BIC VCD
AIC 0.91 1
BIC 0.70 1
VCD 2.72 ·10
−43
2.72 ·10
−43
K AIC BIC VCD
AIC 0.44 1
BIC 0.85 1
VCD 2.72 ·10
−43
2.72 ·10
−43
g
1
AIC BIC VCD
AIC 0.66 0.79
BIC 0.75 0.87
VCD 0.63 0.75
g
2
AIC BIC VCD
AIC 0.81 0.90
BIC 0.75 0.96
VCD 0.40 0.69
g
3
AIC BIC VCD
AIC 0.84 1.37 ·10
−3
BIC 0.76 8.37 ·10
−4
VCD 1 1
f
1
AIC BIC VCD
AIC 0.64 1
BIC 0.52 1
VCD 1.24 ·10
−30
2.39 ·10
−28
f
2
AIC BIC VCD
AIC 0.19 1
BIC 0.79 1
VCD 1.34 ·10
−15
9 ·10
−19
f
3
AIC BIC VCD
AIC 0.98 1
BIC 0.37 1
VCD 1.08 ·10
−39
1.07 ·10
−38
f
4
AIC BIC VCD
AIC 0.86 4.78 ·10
−2
BIC 0.43 2.35 ·10
−2
VCD 1.09 ·10
−5
5.7 ·10
−6
f
5
AIC BIC VCD
AIC 0.39 0.77
BIC 0.99 0.77
VCD 4.72 ·10
−13
6.5 ·10
−15
tions, specially over the group of the three real prob-
lem instances, where the VCD regularization method
is clearly the best.
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
34
AIC BIC VCD
6 8 10 12 14
abalone
AIC BIC VCD
2.0e−07 6.0e−07 1.0e−06 1.4e−06
ailerons
AIC BIC VCD
20 40 60 80 100 120 140
autoMPG8
Figure 6: Empirical distribution of the executions, for func-
tions associated to real problems.
Table 8: Prediction risk of the model obtained from the best
execution.
Instance AIC BIC VCD
Abalone 5.39 6.35 5.35
Ailerons 1.22 ·10
−7
1.01 ·10
−7
9.93 ·10
−8
AutoMPG8 18.53 15.38 14.67
Table 9: Results of the crossed statistical hypothesis tests
about the comparative quality of the studied strategies.
Abalone AIC BIC VCD
AIC 5.37 ·10
−2
1
BIC 0.95 1
VCD 3.36 ·10
−6
4.78 ·10
−9
Ailerons AIC BIC VCD
AIC 1 1
BIC 0.12 1
VCD 9.26 ·10
−12
5.3 ·10
−8
AutoMPG8 AIC BIC VCD
AIC 0.76 1
BIC 0.99 1
VCD 1.2 ·10
−2
3.93 ·10
−4
ACKNOWLEDGEMENTS
This work is partially supported by spanish grant
TIN2011-27479-C04-04.
REFERENCES
Akaike, H. (1970). Statistical prediction information. Ann.
Inst. Statistic. Math, 22:203–217.
Alcal
´
a-Fdez, J., Fern
´
andez, A., Luengo, J., Derrac, J., Gar-
cia, S., S
´
anchez, L., and Herrera, F. (2011). Keel data-
mining sofware tool: Data set repository, integration
of algorithms and experimental analysis framework.
Journal of Multiple–Valued Logic and Soft Comput-
ing, 17(2–3):255–287.
Alonso, C. L., Montana, J. L., and Puente, J. (2008).
Straight line programs: a new linear genetic program-
ming approach. In Proc. 20th IEEE International
Conference on Tools with Artificial Intelligence (IC-
TAI), pages 571–524.
Angluin, D. and Smith, C. (1983). Inductive inference:
Theory and methods. ACM Computing Surveys,
15(3):237–269.
Berkowitz, S. (1984). On computing the determinant in
small parallel time using a small number of proces-
sors. Information Processing Letters, 18:147–150.
Bernadro, J. and Smith, A. (1994). Bayesian Theory. John
Willey & Sons.
Burguisser, P., Clausen, M., and Shokrollahi, M. (1997).
Algebraic Complexity Theory. Springer.
Gabrielov, A. and Vorobjov, N. (2004). Complexity of com-
putations with pfaffian and noetherian functions. In
Normal Forms, Bifurcations and Finiteness Problems
in Differential Equations. Kluwer.
Giusti, M., Heintz, J., Morais, J., Morgentern, J., and Pardo,
L. (1997). Straight line programs in geometric elim-
ination theory. Journal of Pure and Applied Algebra,
124:121–146.
Giusti, M. and Heinz, J. (1993). La d
´
etermination des points
isol
´
es et la dimension d
´
une variet
´
e agebrique peut se
faire en temps polynomial. In Computational Alge-
braic Geometry and Commutative Algebra, Symposia
Matematica XXXIV, ed. D. Eisenbud and L. Robbiano,
pages 216–256. Cambridge University Press.
Golberg, P. and Jerrum, M. (1995). Bounding the
vapnik-chervonenkis dimension of concept classes
parametrizes by real numbers. Machine Learning,
18(1):131–148.
Gori, M., Maggini, M., Martinelli, E., and Soda, G. (1998).
Inductive inference from noisy examples using the hy-
brid finite state filter. IEEE Transactions on Neural
Networks, 9(3):571–575.
Heintz, J., Roy, M., and Solerno, P. (1990). Sur la com-
plexit
´
e du principe de tarski-seidenberg. IBulletin de
la Societ
´
e Mathematique de France, 118:101–126.
Koza, J. (1992). Genetic Programming: On the Program-
ming of Computers by Means of Natural Selection.
MIT Press.
ModelComplexityControlinStraightLineProgramGeneticProgramming
35

Nikolaev, N. and Iba, H. (2001). Regularization approach
to inductive genetic programming. IEEE Transactions
on Evolutionary Computation, 5(4):359–375.
Oakley, H. (1994). Two scientific applications of genetic
programming: Stack filters and nonlinear fitting to
chaotic data. In Advances in Genetic Programming,
pages 369–389. Cambridge, MA: MIT Press.
Poli, R. and Cagnoni, S. (1997). Evolution of pseudo-
coloring algoritms for image enhancement with inter-
active genetic programming. In J.R. Koza, K.Deb, M.
Dorigo, D.B. Fogel, M. Garzon, H. Iba and R.L. Riolo
Eds, pages 269–277. Cambridge, MA: MIT Press.
Shaoning, P. and Kasabov, N. (2004). Inductive vs trans-
ductive inference, global vs local models: Svm, tsvm
and svmt for gene expression classification problems.
In Proceedings IEEE International Joint Conference
on Neural Networks, pages 1197–1202.
Tackett, W. and Carmi, A. (1994). The donut problem: Scal-
ability and generalization in genetic programming. In
Advances in Genetic Programming, pages 143–176.
Cambridge, MA: MIT Press.
Tenebaum, J., Griffiths, T., and Kemp, C. (2006). Theory
based bayesian models of inductive learning and rea-
soning. Trends in Cognitive Sciences, 10(7).
Vapnik, V. (1998). Statistical Learning Theory. John Willey
& Sons.
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
36
