
A New Simple Method for Kinematic Detection of Gait Events
Xiaolei Lv
1,2
, Yi Wei
1
and Shihong Xia
1
1
The Beijing Key Laboratory of Mobile Computing and Pervasive Device,
Institute of Computing Technology, Chinese Academy of Sciences, Beijing, China
2
University of Chinese Academy of Sciences, Beijing, China
Keywords:
Gait Event, Heel Strike, Toe Off, Gait Cycle, Kinematic Detection.
Abstract:
The detection of gait events in locomotion, such as toe-off and heel-strike, provides a basic criterion for the
division of a step cycle. This paper presents a new simple method for kinematic detection of gait events using
kinematic data captured from only one marker attached to heel. We analyze the geometric distribution of
the markers spatial positions over a small window of frames, and find there are new characteristics on the
curve. These characteristics are used to detect the gait events for normal gaits. True errors (mean ± standard
deviation) in the experiments on normal gaits are 8 ± 8 ms for heel-strike and 12 ± 20 ms for toe-off, where
above 91% of subjects’ heel strike events can be determined, with at most one frame (8.3 ms) error away from
the ground reaction force (GRF) results.
1 INTRODUCTION
The detection of heel-strike (HS) and toe-off (TO)
plays a very important role in walking gait analysis,
which determines the stance and swing phase and al-
lows normalization of gait kinematics. The gold stan-
dard method of defining gait events is dependent on
the force plate. It would be necessary for a labora-
tory to be equipped with at least two force platforms
to determine the temporal components of a complete
strike. Unfortunately, the number of available force
plates limits the number of consecutive gait cycles
that can be analyzed (Hreljac and Marshall, 2000).
As a result, researchers have discussed and presented
many methods to detect gait events using other equip-
ments, such as pressure-sensitive switches (Aber-
nethy et al., 1995), photocell contact mat (Viitasalo
et al., 1997), accelerometer (Mayagoitia et al., 2002),
optical motion capture system (O’Connor et al., 2007;
Desailly et al., 2009; Zeni Jr et al., 2008; Kiss, 2010).
The idea of methods using the optical motion cap-
ture device is to extract the characteristics of trajec-
tories of markers attached to the specified location
on the body and then infer the gait events by these
characteristics. In the early research (Mickelborough
et al., 2000) on kinematic detection of gait events, the
events of the heel-strike and toe-off were inferred by
naked eyes, where one made a subjective decision by
observing the plots of marker’s trajectory and veloc-
ity. It is difficult to implement this method (O’Connor
et al., 2007), because of the inherent inaccuracy of
the visual inspection. Automatic algorithms were
proposed (Ghoussayni et al., 2004; Kar
ˇ
cnik, 2003),
where thresholds on the height and velocity of mark-
ers are needed. Hreljac and Marshall (2000) proposed
a Hreljac-Marshall algorithm (HMA) method for de-
tecting gait events based on the displacement, accel-
eration and jerk of heel and toe markers. O’Connor et
al. (2007) introduced a foot velocity algorithm (FVA)
which relies on the identification of local maximum
and minimum of the vertical velocity signal from the
midpoint of the heel and toe marker locations. Be-
cause the optimal filtering of each marker is used as
an initial step in the HMA and FVA methods, results
could be sensitive to the choice of cutoff frequency
(Tirosh and Sparrow, 2003). By observing the char-
acteristics of the gait events, Zeni Jr et al. (2008) used
the distance between the projection of the sacrum’s
marker on the ground and the heel’s or toe’s marker
to detect the gait events.
It can be seen that the advances of recent research
using optical motion capture device are moving to-
ward a more and more simple, robust and automatic
direction. For example, some simple kinematic char-
acteristics of locomotion are defined as the distance
between the projection of root’s marker on the ground
and the heel’s or toe’s marker (Zeni Jr et al., 2008), or
as local maximum and minimum in the vertical ve-
25
Lv X., Wei Y. and Xia S..
A New Simple Method for Kinematic Detection of Gait Events.
DOI: 10.5220/0004563600250029
In Proceedings of the International Congress on Sports Science Research and Technology Support (icSPORTS-2013), pages 25-29
ISBN: 978-989-8565-79-2
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
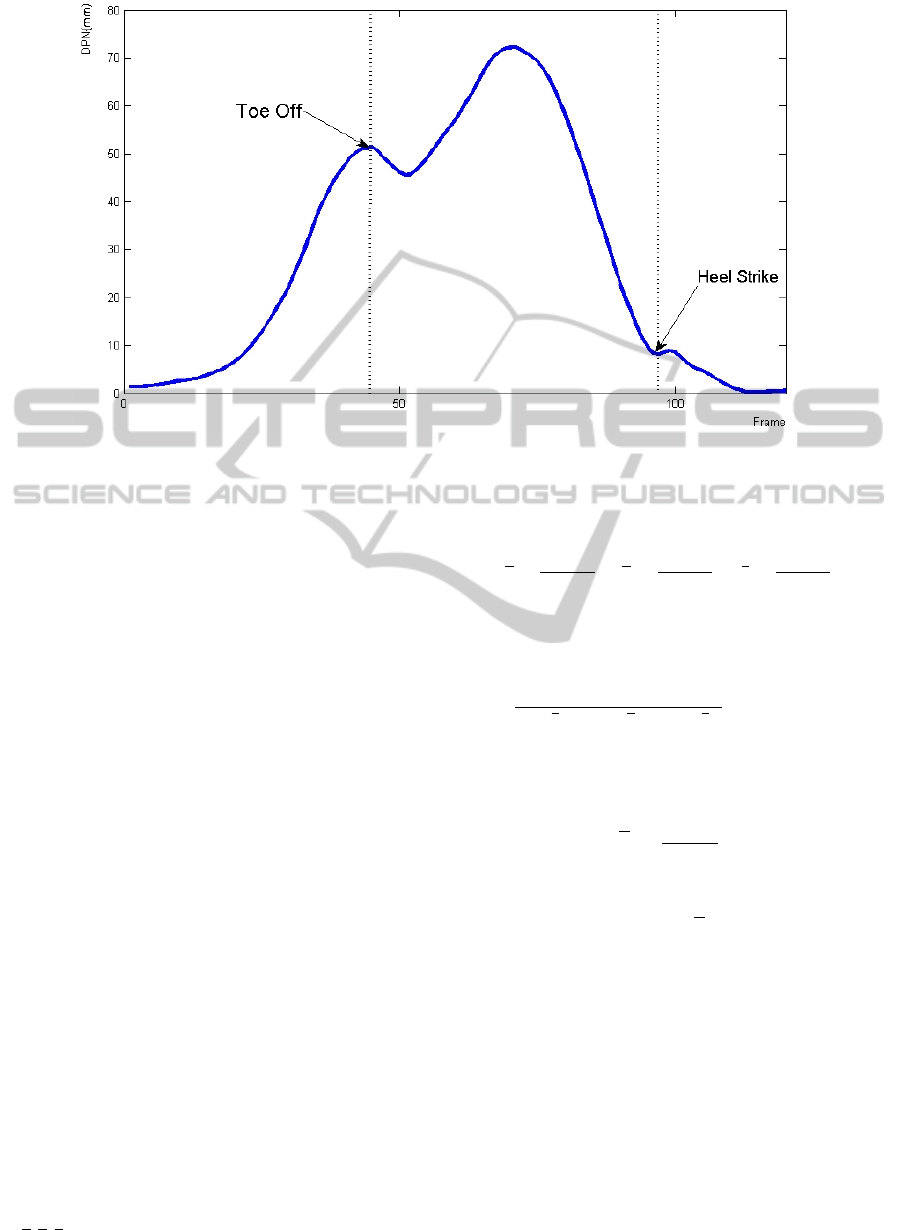
Figure 1: DPN as a function of frame number throughout a gait cycle with the gait events of toe-off and heel-strike indicated.
locity signal from the midpoint of the heel and toe
marker locations (Desailly et al., 2009). Many efforts
and achievements have been done, however, some re-
search issues are not known yet. For example, could
the number of markers used in gait event detection be
reduced or not? Is there any new marker placement
can be used to discover new gait patterns?
Different from previous work, we investigate how
to define kinematic characteristics and explore gait’s
characteristics of locomotion using only one marker
attached to heel. The key idea of our method is based
on the fact that the velocity of the swing leg is greater
than that of the supporting leg during locomotion. We
consider the geometric distribution of the marker’s
spatial positions over a small window of frames, and
introduce a metric called dispersion (DPN) for dis-
tinguishing whether the spatial data are dense or not.
Experiments demonstrate the curve of DPN encodes
the gait’s characteristics.
2 METHOD
In this section, DPN is used to describe the move-
ment range of the marker on the heel in some consecu-
tive frames. The computation of DPN is illustrated as
follows. This method analyzes the DPN and detects
the gait events by some characteristics of the curve of
DPN.
(1) For any i −th frame, 2k+ 1 frames (i− k ≤ t ≤
i +k) are taken into consideration. The geometry cen-
ter (x, y, z) of 2k + 1 consecutive markers’ positions
are computed by
x =
t=i+k
∑
t=i−k
x
i
2k + 1
y =
t=i+k
∑
t=i−k
y
i
2k + 1
z =
t=i+k
∑
t=i−k
z
i
2k + 1
(1)
(2) The distances between the 2k + 1 markers’ po-
sitions to the position of the geometry center are com-
puted.
d
t
=
p
(x
t
− x)
2
+ (y
t
− y)
2
+ (z
t
− z)
2
(i−k ≤ t ≤ i+k) (2)
(3) The average distance of d
t
(i − k ≤ t ≤ i + k) is
computed:
d
i
=
t=i+k
∑
t=i−k
d
t
2k + 1
(3)
(4) The dispersion of the markers is defined as fol-
lows:
DPN = d
i
(4)
When plotting the curve of DPN, a very clear char-
acteristic can be observed (see Figure 1). The point of
the specified local maximum is the moment of the toe-
off. The point of the specified local minimum is the
moment of the heel-strike.
In our experiments, kinematic data of the marker
attached to heel and analog data which are output of
the dual integrated force plates (Kistler 9286BA) are
collected synchronously at 120 Hz using a 12-camera
Vicon workstation. The analog data are filtered with a
cutoff frequency of 20 Hz. Heel strike is determined
when the vertical GRF is greater than 20 N for a width
of at least 40 frames (Zeni Jr et al., 2008). Similarly,
icSPORTS2013-InternationalCongressonSportsScienceResearchandTechnologySupport
26
toe-off is determined when the vertical GRF is less
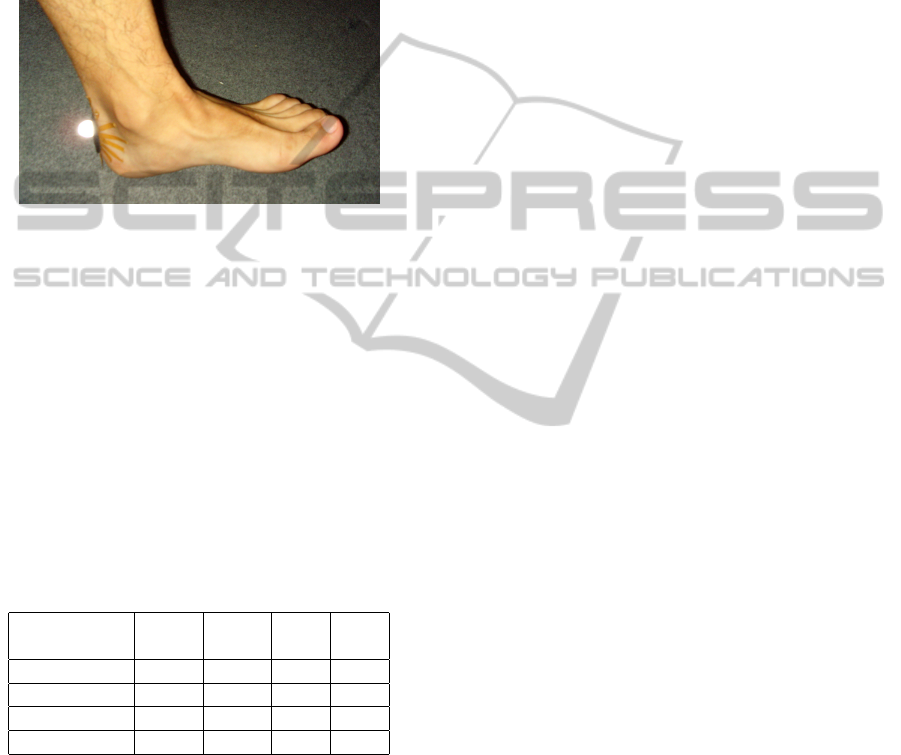
than 20 N for a width of 40 frames. Only one marker
is attached to each heel (see Figure 2).
Normal subjects’ kinematic data with analog data
(#subjects=7, 6 males, 1 female, age 22-26 years,
mean ± standard deviation 23.3 ± 1.3 years, 64
groups of data, 64 cycles) are captured. All sub-
jects have been given a copy of the informed consent.
Walking speed was neither monitored nor controlled.
Figure 2: Marker placement.
3 RESULTS
True errors in the experiments (mean ± standard de-
viation) are 8 ± 8 ms for heel-strike and 12 ± 20 ms
for toe-off. Above 91% of the normal subjects’ heel
strike events can be determined, with at most one
frame (8.3 ms) error away from the ground reaction
force (GRF) results. The Figure 3 and Table 1 show
the detailed results. LHS refers as left heel strike.
LTO refers as left toe off. RHS refers as right heel
strike. RTO refers as right toe off.
Table 1: Percentages of computationally determined events
offset by the frame error of the normal subjects.
Absolute
Error(frame)
0 1 2 ≥ 3
LHS 44.90 55.10 0 0
LTO 71.43 20.40 8.17 0
RHS 34.28 57.14 8.58 0
RTO 57.14 32.65 8.16 2.05
In our experiments, the variable k can be manu-
ally changed. As k increases, the curve of DPN be-
comes more and more smooth. Experiments show
that a good result can be achieved when the k is set
to 3 (see Figure 4).
The advantages of the method could be summa-
rized as follows. Firstly, only one marker attached
to heel is used in gait event detection. It would be
helpful to set up a gait laboratory using optical mo-
tion capture system. Secondly, new gait’s character-
istics are explored and used for gait event detection.
The accuracy of the detection of heel-strike is very
high. Above 91% of the normal subjects heel strike
events can be determined, with at most one frame
(8.3 ms) error away from the ground reaction force
(GRF) results. Thirdly, this method is easy to be im-
plemented for automatic event detection without the
use of thresholds and optimal filtering of kinematic
data.
There are still some limitations in the proposed
method. The result of the gait events’ detection of
the toe off is not satisfying. Feet’s gestures are not the
same for different subjects when the gait event of the
toe off happens. There are many ways to measure the
geometric distribution of marker’s spatial positions.
There may be a better measurement to achieve better
results. The event detection of pathological gaits is
still an open problem. In future, we will do further
research on this issue especially for the pathological
gaits.
4 CONCLUSIONS
In conclusion, the method proposed in this paper is
simple and robust, which is accurate in the detection
of heel strike. It validates that we can detect the gait
events accurately with only one marker. The future
work is to find a robust algorithm for the event detec-
tion of pathological gaits.
ACKNOWLEDGEMENTS
This paper was supported in part by the National Nat-
ural Science Foundation of China, No. 61173055.
REFERENCES
Abernethy, B., Burgess-Limerick, R., Engstrom, C., Hanna,
A., and Neal, R. J. (1995). Temporal coordination of
human gait. Advances in Psychology, 111:171–196.
Desailly, E., Daniel, Y., Sardain, P., and Lacouture, P.
(2009). Foot contact event detection using kinematic
data in cerebral palsy children and normal adults gait.
Gait and Posture, 29(1):76.
Ghoussayni, S., Stevens, C., Durham, S., and Ewins, D.
(2004). Assessment and validation of a simple au-
tomated method for the detection of gait events and
intervals. Gait and Posture, 20(3):266–272.
Hreljac, A. and Marshall, R. N. (2000). Algorithms to deter-
mine event timing during normal walking using kine-
matic data. Journal of Biomechanics, 33(6):783–786.
ANewSimpleMethodforKinematicDetectionofGaitEvents
27
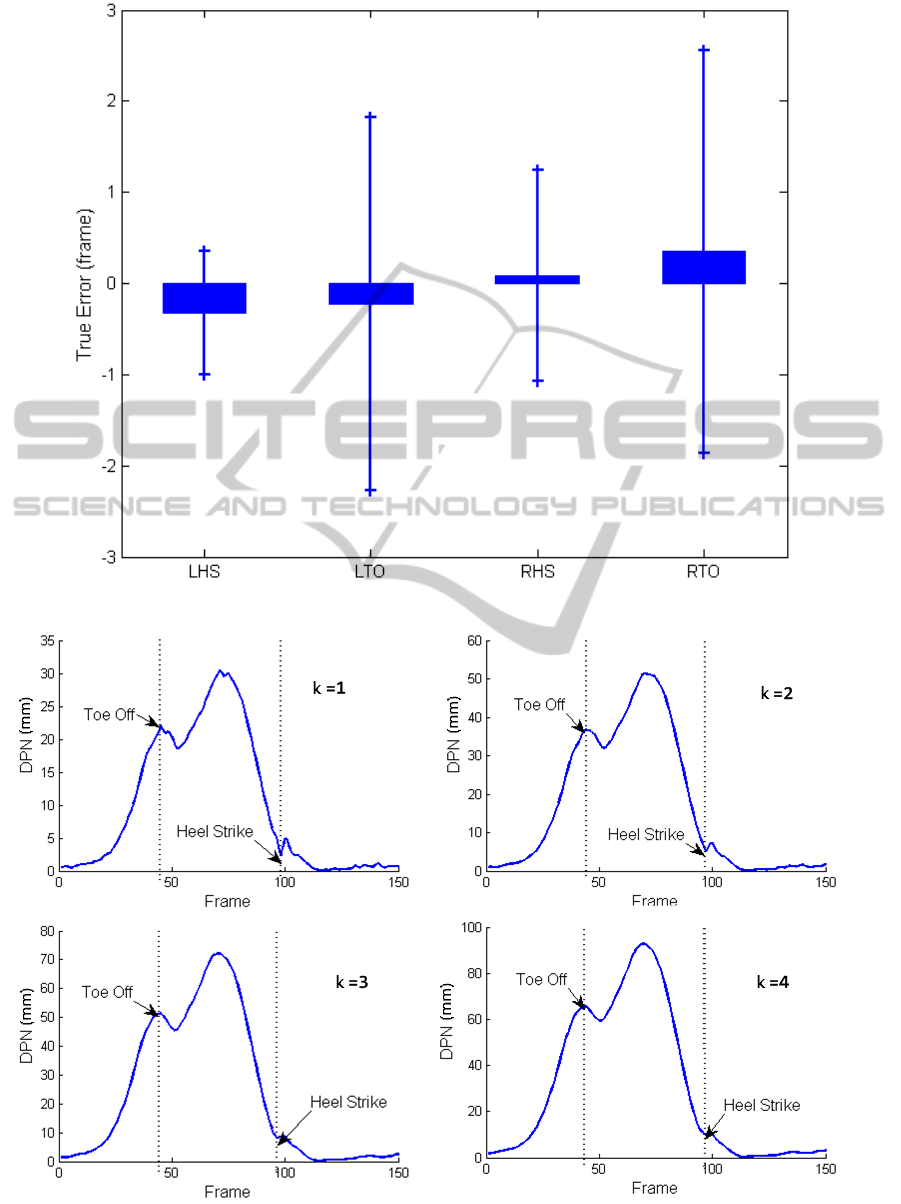
Figure 3: Candlestick chart with means and standard deviation of the true errors of normal gaits.
Figure 4: Curves of the DPN as the k varies. As k increases, the curve of DPN becomes more and more smooth.
icSPORTS2013-InternationalCongressonSportsScienceResearchandTechnologySupport
28

Kar
ˇ
cnik, T. (2003). Using motion analysis data for foot-
floor contact detection. Medical and Biological Engi-
neering and Computing, 41(5):509–512.
Kiss, R. M. (2010). Comparison between kinematic and
ground reaction force techniques for determining gait
events during treadmill walking at different walking
speeds. Medical Engineering and Physics, 32(6):662–
667.
Mayagoitia, R. E., Nene, A. V., and Veltink, P. H. (2002).
Accelerometer and rate gyroscope measurement of
kinematics: an inexpensive alternative to optical mo-
tion analysis systems. Journal of Biomechanics,
35(4):537–542.
Mickelborough, J., Van Der Linden, M., Richards, J., and
Ennos, A. (2000). Validity and reliability of a kine-
matic protocol for determining foot contact events.
Gait and Posture, 11(1):32–37.
O’Connor, C. M., Thorpe, S. K., OMalley, M. J., and
Vaughan, C. L. (2007). Automatic detection of
gait events using kinematic data. Gait and Posture,
25(3):469–474.
Tirosh, O. and Sparrow, W. (2003). Identifying heel contact
and toe-off using forceplate thresholds with a range
of digital-filter cutoff frequencies. Journal of Applied
Biomechanics, 19(2):178–184.
Viitasalo, J., Luhtanen, P., Mononen, H., Norvapalo, K.,
Paavolainen, L., and Salonen, M. (1997). Photocell
contact mat: a new instrument to measure contact and
flight times in running. Journal of Applied Biome-
chanics, 13:254–266.
Zeni Jr, J., Richards, J., and Higginson, J. (2008). Two sim-
ple methods for determining gait events during tread-
mill and overground walking using kinematic data.
Gait and Posture, 27(4):710–714.
ANewSimpleMethodforKinematicDetectionofGaitEvents
29
