
Soccer Ball Detection in Occluded Situations for Single Static Camera
Systems
Josef Halbinger and J
¨
urgen Metzler
Fraunhofer Institute of Optronics, System Technologies and Image Exploitation IOSB,
Fraunhoferstr. 1, 76131 Karlsruhe, Germany
Keywords:
Soccer, Sport Analysis, Ball Tracking.
Abstract:
The interest on acquiring player and ball data during soccer games is increasing in several domains such as
media. Consequently, tracking systems are becoming widely used for live data gathering. Due to costs, sta-
dium infrastructure, media rights etc. there is a trend for stand-alone mobile low-cost soccer tracking systems.
The drawback of such systems is that generally only low-resolution images of the players are available which
strongly exacerbates the problem of detection and tracking the soccer ball. Besides difficulties that arise from
the appearance of the ball by itself, the detection of the ball in situations where it is occluded by the players
is very challenging. This paper presents a tracking framework for the reconstruction of the ball trajectory
from monocular low-resolution soccer image sequences. The focus of this paper is the detection of the ball in
occluded situations. The approach is tested and evaluated on Bundesliga data sets.
1 INTRODUCTION
The increasing professionalization of soccer is ac-
companied by a growing media attention as well as
game analysis and professional training. Especially
the automation of live analysis of soccer games is in-
teresting for several domains such as media. How-
ever, the automation requires a robust acquisition of
player and ball data that still relies heavily on the
interaction of operators (so-called scouts) in current
systems. Live acquisition of quantitative motion data
such as distances covered by players, distances be-
tween players or ball possession can only be done
by sophisticated automation. Our overall two-camera
tracking system provides this kind of quantitative data
for supporting a scout and for the automated acquisi-
tion of the relevant data (Herrmann et al., 2011). It au-
tomatically detects, classifies and tracks the ball, the
22 soccer players, the referee and the two linesmen in
one image sequence of double Full HD resolution.
The main contribution of this work is the detection
of the ball in situations in which the ball is close to a
player or even partially covered by one. Detection of
the ball in image sequences generally is a difficult task
as the appearance of the ball varies from image to im-
age. For instance, the high accelerations occurring at
the ball may cause motion blur so that the shape of the
ball is then more of an ellipse than a circle (see Fig.
1 (a)). Also, the color of the ball may be vary from
image to image because of changes of the illumina-
tion conditions or it has the same color as the lines of
the pitch which exacerbates the ball detection task.
(a) (b)
Figure 1: (a) Variety of the appearance of the ball extracted
from one image sequence and (b) examples for partially oc-
cluded situations.
Another challenge is the image resolution of the ball
which is usually very small so that also confusions
with body parts may occur. Depending on the camera
perspective, the ball is in front of a complex image
background such as the audience which exacerbates
its detection as well. Besides difficulties that arise
from the appearance of the ball by itself, the detec-
tion of the ball is very challenging in situations where
it is occluded by the players (see Fig. 1 (b)). Every
time a player touches the ball there is a chance that
the ball is not fully visible for a short time as parts of
the player’s body can move between ball and the cam-
111
Halbinger J. and Metzler J..
Soccer Ball Detection in Occluded Situations for Single Static Camera Systems.
DOI: 10.5220/0004586001110115
In Proceedings of the International Congress on Sports Science Research and Technology Support (icSPORTS-2013), pages 111-115
ISBN: 978-989-8565-79-2
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
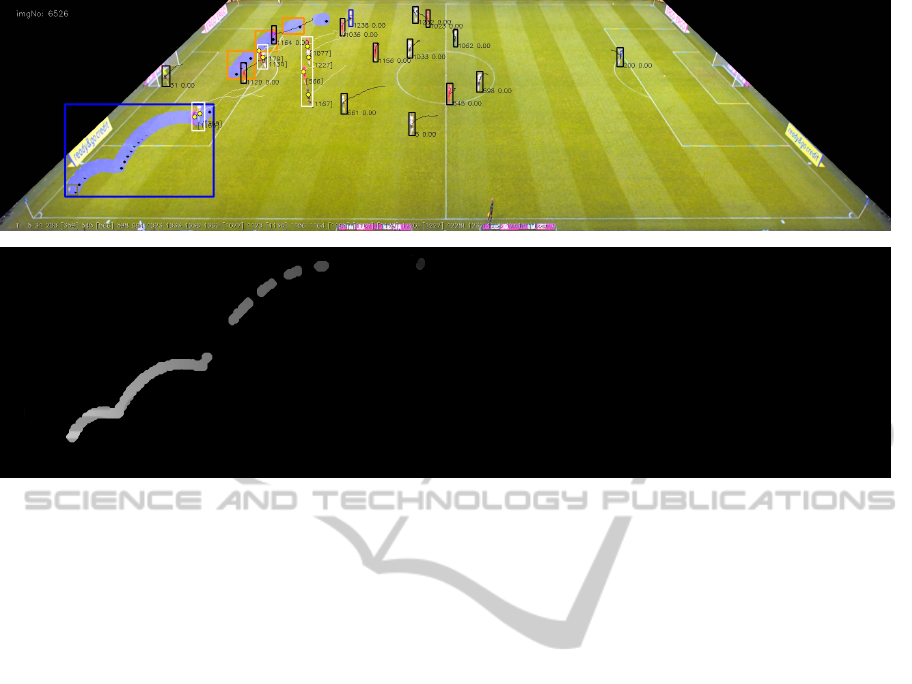
Figure 2: Sample snapshot of the processed input image sequence including detected ball tracklets marked by rectangles (top)
and one for the corresponding motion history image (bottom).
era. However, as long as the ball is at least partially
visible, there is an opportunity to identify the ball in
the image.
The motivation of this work is to find a solution
which can help to detect the ball in such cases. At
the first stage, a circle detection method is applied be-
fore, at the second stage, the detected circles are eval-
uated by examining the Freeman chain code (Free-
man, 1961) of the found contours. There are a cou-
ple publications for detecting and tracking the soccer
ball as seen in (D’Orazi and Leo, 2010). However,
most of these approaches focus on tracking the ball
in broadcast soccer videos and require a high image
resolution. The approach presented in this contribu-
tion, is applicable to static camera systems, even for
low-resolution cameras. So it can be used in huge
tracking systems consisting of several cameras usu-
ally fixed installed in stadiums as well as for low-cost
tracking systems that generally consist of 1-3 cameras
capturing the entire pitch.
The contribution is structured as follows: In Sec-
tion 2, the module for the ball detection is described.
It is a two-stage approach: At the first stage, the ball
is detected in situations in which the ball is gener-
ally not occluded. Also, robust partial ball trajectories
(tracklets) are extracted. In order to get also detection
hypotheses in occluded situations (within the gaps be-
tween the tracklets), a ball detector specialized for oc-
cluded situations is used at the second stage. Then, in
Section 3, results of an evaluation on data sets of a
Bundesliga match are presented.
2 BALL DETECTION
The reconstruction of the ball trajectory requires a re-
liable soccer ball detection. However, this is chal-
lenging as there are usually a lot of occlusions. Fur-
thermore, a high detection rate should be achieved
at a low false alarm rate.In order to be able to ful-
fill this requirement, we follow a detection approach
that has been widely established (see e.g. (D’Orazi
and Leo, 2010)): we divide the detection task in two
steps. First, ball candidates are extracted followed by
an add-on verification of them.
2.1 Not Occluded Situations
At the first stage, the soccer ball has to be detected.
Due to the real-time constraint for live applications,
a feature-based detection with e.g. a sliding win-
dows approach cannot be used. Instead, as we cap-
ture the images from a static camera, we first apply
the foreground/background segmentation from Kim
et al. (Kim et al., 2004). Temporal static background
like the pitch and marking lines are segmented as
background, whereas moving objects generate chang-
ing appearance and are therefore segmented as fore-
icSPORTS2013-InternationalCongressonSportsScienceResearchandTechnologySupport
112
ground. During the ball candidate extraction, all fore-
ground regions are extracted and checked for their
size using calibration information of the cameras.
Foreground regions that are no candidates for the
soccer ball due to their size are removed. Out of
the remaining regions, the external contours are ex-
tracted as a sequence of points and analyzed after-
ward. If the number of the contour pixels is higher
than a bias, an ellipse is fitted to it and the mean
squared error between every sequence point and the
ellipse is calculated. Ball candidates with a high mean
squared error are removed. The remaining candidates
are kept as verified foreground regions in the fore-
ground/background segmented image. Then, a dilata-
tion is applied and the last n binary images are accu-
mulated to a so-called Motion History Image (MHI)
of verified ball candidates. Finally, ball tracklets (ro-
bust partial ball trajectories) are finally extracted from
the MHI. Fig. 2 shows a MHI and some results of de-
tected/extracted ball tracklets.
2.2 Partially Occluded Situations
The foreground/background segmentation often
merges ball and player into a single silhouette if they
are either close to each other or partially occlude
each other. Thus, the ball is not a singular object and
only appears as a bump poking out of the player’s
silhouette in the resulting image (Fig. 3 (a) and (b)).
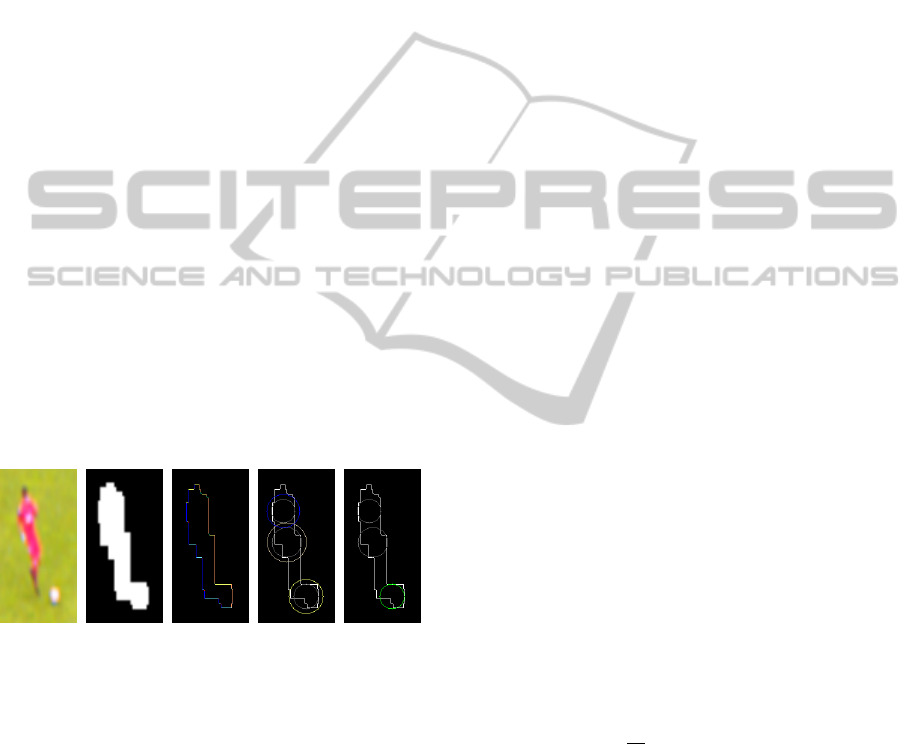
(a) (b) (c) (d) (e)
Figure 3: (a) Input image, (b) foreground/background seg-
mentation of the input image, (c) chain code representation
of the outer contour: le ft- and right-values (yellow and
light blue/horizontal lines) of the chain code are of partic-
ular interest, (d) detected Hough circles (gray/smaller cir-
cles) and circular RoI RoI
bc
in which the CCH is calculated
(blue/upper, brown/central and yellow/lower circle), (e) de-
tected Hough circles and identified ball (green/lower cirlce).
At the second stage, the goal is to identify these
bumps. In order to achieve this, we apply a two-step
approach again. In the first step, circles (or at least
parts of circles) in the image are detected via Hough
transform (Kimme et al., 1975). In the second step,
the Freeman chain code (Freeman, 1961) is consid-
ered to decide if a detected circle is a soccer ball.
In the following, the details of the procedure are
given: At the beginning of the first step, all the player
silhouettes of the foreground/background segmented
image are extracted into separate images. On each of
these silhouette images, a Hough transform for circle
detection is applied. All detected circles and circu-
lar arcs that approximately match the predefined ball
dimensions are determined as ball candidates. A re-
sulting Hough circle c is characterized by the center
coordinates x and y as well as the radius r : c = (x, y, r).
The Hough transform variant chosen in this work
is called the Hough gradient method (Bradski and
Kaehler, 2008). Unlike comparable methods, this
variant only uses a two-dimensional accumulator in-
stead of a three dimensional one. This is achieved by
incrementing only accumulator cells along the gradi-
ent direction of each non zero pixel of the edge map
instead of incrementing a complete circle and there-
fore keeping a separate accumulator for every pre-
defined possible circle radius. This is beneficial to
the running time of the algorithm. The downside is
a lower recognition rate of circles with a concentric
counterpart. But this flaw is acceptable since con-
centric circles do not occur in the segmented image
material.
At the beginning of the second step, the outer con-
tour of the silhouette image is calculated. Then the
Freeman chain code of the contour is determined (Fig.
3 (c)). Now, in a circular Region of Interest (RoI)
around the ball candidates that were identified be-
fore, the Chain Code Histogram (CCH) is computed
(Iivarinen and Visa, 1996).
The circular RoI is constructed around the cen-
ter coordinates x and y of the ball candidate, adding
a small ∆ to the radius r (Fig. 3 (d)). The ∆ is
added to encounter the problem that the detected cir-
cles of the Hough gradient method tend to be slightly
smaller than they actually are. As a result, the consid-
ered RoI around the ball candidate RoI
bc
is defined as
RoI
bc
= (x, y, r + ∆).
As described in (Iivarinen and Visa, 1996), the
CCH is a discrete function
p(k) =
n
k
n
, k = 0, 1, ..., K − 1 , (1)
where n
k
is the number of chain code values k in a
chain code, and n is the number of links in a chain
code. In case of the Freeman chain code there are
K = 8 possible directions.
Generally, a bump has a high amount of le f t and
right-values of the chain code at the same time, while
the le f t-values are on the upper side of the bump and
right-values on the lower side of the bump. As a con-
sequence, a RoI
bc
with a CCH that provides certain
frequencies of occurrence of le f t- and right-values λ
and ρ is defined to indicate a bump in the silhouette. If
SoccerBallDetectioninOccludedSituationsforSingleStaticCameraSystems
113
this frequency lies beyond a certain threshold τ (and
RoI
bc
originates from inside the silhouette), it is as-
sumed that a bump exists in this area. As this bump
also matches the dimensions of the soccer ball, the ex-
amined RoI
bc
is identified to have the soccer ball in it
(Fig. 3 (e)):
Ball =
(
1 : λ ≥ τ and ρ ≥ τ
0 : else
. (2)
3 EXPERIMENTAL RESULTS
We tested the first-stage of our approach - the track-
let extraction - on a data set of a Bundesliga match
consisting of an image sequence with about 140.000
images of double Full HD resolution (see Fig. 2 for
an example). There are 1428 tracklets to detect, in sit-
uations where the ball is neither occluded nor merged
with a player. In these situations the approach de-
tected 1343 tracklets and missed 85. There was no
false alarm, i.e. all detected ball tracklets were cor-
rectly detected as such.
The second-stage - ball detection in occluded sit-
uations - was tested on two data sets of a Bundesliga
match. Both sets consist of image regions that were
extracted from the same Bundesliga sequence as in
the first stage test. The first data set consists of 1408
non-consecutive images with a resolution of 50×100
pixels, 704 of them showing the ball close to a player
or partially occluded by a player. The other 704 im-
ages don’t show a ball. The second data set consists of
9634 consecutive images with a resolution of 64×128
pixels, 111 of them showing the ball close to a player
or partially occluded by a player. 9323 images don’t
show the ball.
As mentioned in Section 2.2, the threshold τ de-
scribes the required frequencies of occurrence λ and
ρ of le f t and right chain code values inside of RoI
bc
.
In order to determine the optimal threshold, τ is iter-
ated from a specified minimum to a specified maxi-
mum in both data sets. The range is set in a way that
all possible cases are covered: it starts with a con-
figuration that identifies every Hough circle as a ball
and ends with a configuration that detects no single
Hough circle as a ball. The results are displayed in a
ROC (Receiver Operating Characteristics) curve that
puts the true positive rate of a data set in relationship
with its false positive rate (see Fig. 4).
In the second data set, a true positive respectively
false positive rate of 1.0 could not be reached. The
reason for this is that no Hough circles matching the
predefined ball dimensions were found. This leads to
scenarios where varying the τ-threshold has no effect.
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
True Positive Rate
False Positive Rate
data set 1
data set 2
Figure 4: ROC curve of the tested second-stage approach:
the ball detection approach for occluded situations. “data
set 1” consists of 1408 non-consecutive images: 704 of
them showing the ball close to a player or partially occluded
by a player and the other 704 images don’t show a ball.
“data set 2” consists of 9634 consecutive images: 111 of
them showing the ball close to a player or partially occluded
by a player and 9323 images don’t show the ball.
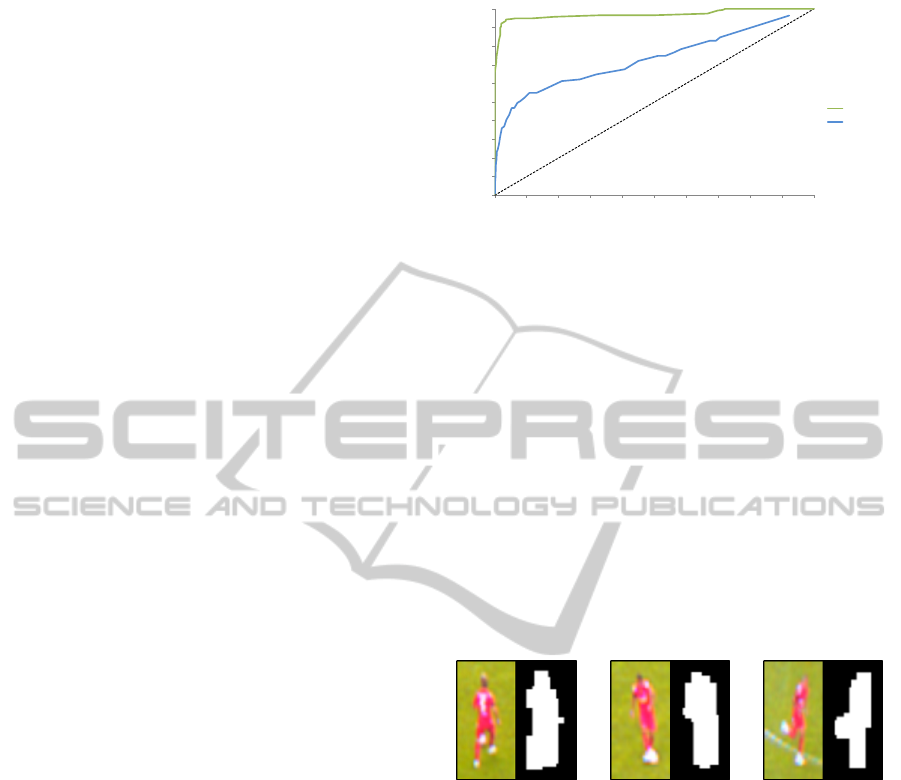
The results also differ because the second data set has
more difficult cases: On the one hand, there are sev-
eral images in which the ball is between the player’s
legs as illustrated in Fig. 5 (a) or right in front of the
foot as shown in Fig. 5 (b). As a result, the ball does
not appear as a bump in the segmented image. On
the other hand, there are segmented images that have
a strong bump, although there is no ball on the input
image as shown in Fig. 5 (c).
(a) (b) (c)
Figure 5: Difficult cases for the ball detector: (a) Ball be-
tween player’s legs, (b) ball right in front of a player and
(c) player without a ball, although there is a bump in the
segmented image.
4 CONCLUSIONS
In this paper, a two-stage approach for the detection of
the soccer ball with the focus on occluded situations
where the ball is partially occluded or merged with a
player has been presented. We could yield a reliable
extraction of ball tracklets in not occluded situations.
Also, the ball detector for occluded situations is able
to reliably detect balls in cases where the ball is par-
tially occluded. With the exception of the delay in the
output of the ball coordinates, which depends on the
length of the motion history, the proposed approach is
real-time capable.
icSPORTS2013-InternationalCongressonSportsScienceResearchandTechnologySupport
114

REFERENCES
Bradski, G. and Kaehler, A. (2008). Learning OpenCV:
Computer vision with the OpenCV Library. O’Reilly
Media, Sebastopol.
D’Orazi, T. and Leo, M. (2010). A review of vision-based
systems for soccer video analysis. Pattern Recogni-
tion, 43(8):2911–2926.
Freeman, H. (1961). On the encoding of arbitrary geometric
configurations. IRE Transactions on Electronic Com-
puters EC, 10(2):260–268.
Herrmann, C., Manger, D., and Metzler, J. (2011). Feature-
based localization refinement of players in soccer us-
ing plausibility maps. In Proc. of the IPCV (WORLD-
COMP), volume 2.
Iivarinen, J. and Visa, A. (1996). Shape recognition of ir-
regular objects. In Proc. SPIE 2904, pages 25–32.
Kim, K., Chalidabhongse, T., Harwood, D., and Davis, L.
(2004). Real-time foreground-background segmen-
tation using codebook model. Real-Time Imaging,
11(3):172–185.
Kimme, C., Ballard, D., and Sklansky, J. (1975). Finding
circles by an array of accumulators. Communications
of the ACM, 18(2):120–122.
SoccerBallDetectioninOccludedSituationsforSingleStaticCameraSystems
115
