
Tuning of Fuzzy Fractional PD
β
+ I Controllers by Genetic Algorithm
Isabel S. Jesus and Ramiro S. Barbosa
GECAD - Knowledge Engineering and Decision Support Research Center,
Institute of Engineering / Polytechnic of Porto (ISEP/IPP), Dept. of Electrical Engineering, Porto, Portugal
Keywords:
Fractional Calculus, Fuzzy Fractional PID Control Systems, Genetic Algorithm, Optimization.
Abstract:
In this paper we consider the development of an optimal fuzzy fractional PD + I controller in which the
parameters are tuned by a Genetic algorithm (GA). Fuzzy control is an intelligent control methodology that
mimics human thinking and reacting in order to improved the performance of systems. On the other hand,
GA can reach exact or approximate solutions to optimization and search problems. In this line of thought, the
performance of the proposed fuzzy fractional control is illustrated through two application examples.
1 INTRODUCTION
Fractional calculus (FC) is a generalization of integra-
tion and differentiation to a non-integer order α ∈ C,
being the fundamental operator
a
D
α
t
, where a and t
are the limits of the operation (Oldham and Spanier,
1974; Podlubny, 1999a). The FC concepts constitute
a useful tool to describe several physical phenomena,
such as heat, flow, electricity, magnetism, mechanics
or fluid dynamics. Presently, the FC theory is ap-
plied in almost all areas of science and engineering,
being recognized its ability in bettering the modelling
and control of many dynamical systems. In fact, dur-
ing the last years FC has been used increasingly to
model the constitutivebehavior of materials and phys-
ical systems exhibiting hereditary and memory prop-
erties. This is the main advantage of fractional-order
derivatives in comparison with classical integer-order
models, where these effects are simply neglected.
In this paper we investigate several control strate-
gies based on fuzzy fractional-order algorithms. The
fractional-order PID controller (PI
α
D
β
controller) in-
volves an integrator of order α ∈ ℜ
+
and a differen-
tiator of order β ∈ ℜ
+
. It was demonstrated the good
performance of this type of controller, in comparison
with the conventional PID algorithms. Recently, there
have been a lot of researches in the application of
fuzzy PID control (Mizumoto, 1995; Carvajal et al.,
2000; Eker and Torun, 2006; Barbosa, 2010; Barbosa
et al., 2010; Das et al., 2012; Delavari et al., 2010;
Tian et al., 2010; Padula and Visioli, 2011). The fuzzy
method offer a systematic procedure to design con-
trollers for many kind of systems, that often leads to a
better performance than that of the conventional PID
controller. It is a methodology of intelligent control
that mimics human thinking and reacting by using a
multivalent fuzzy logic and elements of artificial in-
telligence.
Bearing these ideas in mind, the paper is orga-
nized as follows. Section 2 gives the fundamentals of
fractional-order control systems. Section 3 presents
the control and optimization strategies. Section 4
givessome simulations results assessing the effective-
ness of the proposed methodology. Finally, section 5
draws the main conclusions.
2 FRACTIONAL – ORDER
CONTROL SYSTEMS
Fractional-order control systems are characterized by
differential equations that have, in the dynamical sys-
tem and/or in the control algorithm, an integral and/or
a derivative of fractional-order (Machado, 1997). Due
to the fact that these operators are defined by irra-
tional continuous transfer functions, in the Laplace
domain, or infinite dimensional discrete transfer func-
tions, in the Z domain, we often encounter evaluation
problems in the simulations. Therefore, when analyz-
ing fractional-order systems, we usually adopt con-
tinuous or discrete integer-order approximations of
fractional-order operators (Podlubny, 1999b; Barbosa
et al., 2006). The following two subsections provide a
background for the remaining of the article by giving
the fundamental aspects of the FC, and the discrete
integer-order approximations of fractional-order op-
282
S. Jesus I. and S. Barbosa R..
Tuning of Fuzzy Fractional PDb + I Controllers by Genetic Algorithm.
DOI: 10.5220/0004589602820287
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 282-287
ISBN: 978-989-8565-70-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
erators.
2.1 Fundamentals of Fractional
Calculus
The mathematical definition of a fractional-order
derivative and integral has been the subject of sev-
eral different approaches (Oldham and Spanier, 1974;
Podlubny, 1999a). One commonly used definition
for the fractional-order derivative is given by the
Riemann-Liouville definition (α>0):
a
D
α
t
f (t) =
1
Γ(n− α)
d
n
dt
n
Z
t
a
f (τ)
(t − τ)
α−n+1
dτ
n− 1 < α < n (1)
where f(t) is the applied function, Γ(x) is the Gamma
function of x and n ∈ ℵ (Mainardi and Gorenflo,
2000). Another widely used definition is given by the
Gr¨unwald-Letnikov approach (α ∈ ℜ):
a
D
α
t
f(t) = lim
h→0
1
h
α
[
t−a
h
]
∑
k=0
(−1)
k
α
k
f (t − kh) (2a)
α
k
=
Γ(α+ 1)
Γ(k+ 1)Γ(α− k+ 1)
(2b)
where h is the time increment and [x] means the inte-
ger part of x.
The ”memory” effect of these operators is demon-
strated by (1) and (2), where the convolution integral
in (1) and the infinite series in (2), reveal the unlimited
memory of these operators, ideal for modelling hered-
itary and memory properties in physical systems and
materials.
An alternative definition to (1) and (2), which
reveals useful for the analysis of fractional-order
control systems, is given by the Laplace transform
method. Considering vanishing initial conditions, the
fractional differintegration is defined in the Laplace
domain, F(s) = L{ f(t)}, as:
L{
a
D
α
t
f (t)} = s
α
F (s) , α ∈ ℜ (3)
The open-loop Bode diagrams of amplitude and phase
of the operator s
α
have correspondingly a slope of
20α dB/dec and a constant phase of απ/2 rad over
the entire frequency domain.
2.2 Approximations of Fractional –
Order Operators
In this paper we adopt discrete integer-order approx-
imations to the fundamental element s
α
(α ∈ ℜ) of
a fractional-order control (FOC) strategy. The usual
approach for obtaining discrete equivalents of contin-
uous operators of type s
α
adopts the Euler, Tustin and
Al-Alaoui generating functions (Chen et al., 2004;
Barbosa et al., 2006).
It is well known that rational-type approxima-
tions frequently converge faster than polynomial-
type approximations and have a wider domain
of convergence in the complex domain (Chen
et al., 2004). Thus, by using the Euler opera-
tor w(z
−1
) = (1−z
−1
)/T
c
, and performing a power
series expansion of [w(z
−1
)]
α
= [(1− z
−1
)/T
c
]
α
gives the discretization formula corresponding to the
Gr¨unwald-Letnikov definition (2):
D
α
z
−1
=
1− z
−1
T
c
α
=
∞
∑
k=0
1
T
c
α
(−1)
k
α
k
z
−k
=
∞
∑
k=0
h
α
(k) z
−k
(4)
where T
c
is the sampling period and h
α
(k) is the im-
pulse response sequence.
A rational-type approximation can be obtained
througha Pad´e approximationto the impulse response
sequence h
α
(k), yielding the discrete transfer func-
tion:
H
z
−1
=
b
0
+ b
1
z
−1
+ ... + b
m
z
−m
1+ a
1
z
−1
+ ... + a
n
z
−n
=
∞
∑
k=0
h(k)z
−k
(5)
where m ≤ n and the coefficients a
k
and b
k
are deter-
mined by fitting the first m+ n+1 values of h
α
(k) into
the impulse response h(k) of the desired approxima-
tion H(z
−1
). Thus, we obtain an approximation that
matchs the desired impulse response h
α
(k) for the first
m+ n+1 values of k (Barbosa et al., 2006). Note that
the above Pad´e approximation is obtained by consid-
ering the Euler operator but the determination process
will be exactly the same for other types of discretiza-
tion schemes.
3 CONTROL AND
OPTIMIZATION STRATEGIES
3.1 Fractional PID control
The generalized PID controller G
c
(s) has a transfer
function of the form (Podlubny, 1999b):
G
c
(s) =
U(s)
E(s)
= K
p
+
K
i
s
α
+ K
d
s
β
α,β > 0 (6)
TuningofFuzzyFractionalPDb+IControllersbyGeneticAlgorithm
283
where α and β are the orders of the fractional inte-
grator and differentiator, respectively. The parame-
ters K
p
, K
i
and K
d
are correspondingly the propor-
tional, integral, and derivative gains of the controller.
Clearly, taking (α,β) = {(1, 1),(1,0),(0,1), (0, 0)}
we get the classical {PID, PI, PD, P} controllers, re-
spectively (Jesus and Machado, 2008). Other PID
controllers are possible, namely: PD
β
controller, PI
α
controller, PID
β
controller, and so on. The fractional
order controller is more flexible and gives the possi-
bility of adjusting more carefully the closed-loop sys-
tem characteristics (Podlubny, 1999a).
In the time domain the PI
α
D
β
is represented by:
u(t) = K
p
e(t) + K
i 0
D
−α
t
e(t) + K
d
0
D
β
t
e(t) (7)
where the fractional order differential operators may
be implemented using the approximations (4) and (5).
3.2 Fuzzy Fractional PD+I Control
Fuzzy control emerged on the foundations of Zadeh’s
fuzzy set theory (Barbosa, 2010; Barbosa et al., 2010;
Mizumoto, 1995). This kind of control is based on
the ability of a human being to find solutions for par-
ticular problematic situations. It is well know from
our experience, that humans have the ability to si-
multaneously process a large amount of information
and make effective decisions, although neither input
information nor consequent actions are precisely de-
fined. Through multivalent fuzzy logic, linguistic ex-
pressions in antecedent and consequent parts of IF-
THEN rules describing the operator’s actions can be
efficaciously converted into a fully-structured control
algorithm.
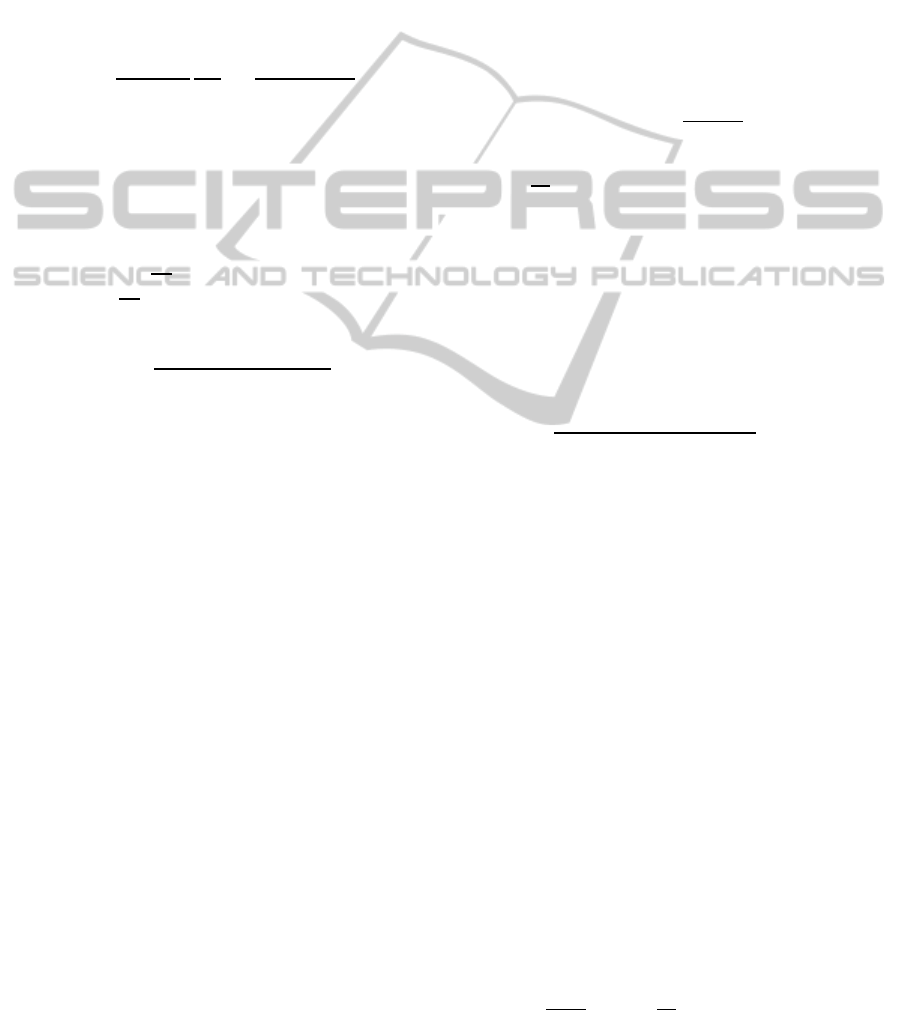
In the system of Fig.1, we apply a fuzzy logic con-
trol (FLC) for the PD
β
actions and the integral of the
error is added to the output in order to find a fuzzy
PD
β
+ I controller (Barbosa, 2010). The block di-
agram of Fig. 2 illustrates the configuration of the
proposed fuzzy controller.
Fuzzy
PD
+I
R(s)
E(s)
U (s)+
C (s)
G (s)
1
N (s)
Saturation System
Controller
Figure 1: Block diagram of the fuzzy control system.
K
ie
I
Fuzzy logic
controller
K
u
K
e
K
ce
D
e
v
u
E
CE
IE
+
+
Figure 2: Fuzzy PD
β
+ I controller.
In this controller, the control actions are the error e,
the fractional derivative of e and the integral of e.
The U represents the controller output. Also, the con-
troller has four gains to be tuned, K
e
, K
ie
, K
ce
corre-
sponding to the inputs and K
u
to the output.
The control actionU is generally a nonlinear func-
tion of error E, fractional change of error CE, and in-
tegral of error IE:
U (k) = [f (E,CE) + IE]K
u
=
h
f
K
e
e(k) + K
ce
D
β
e(k)
+ K
ie
Ie(k)
i
K
u
(8)
where D
β
is the discrete fractional derivative imple-
mented as rational approximation (5) using the Eu-
ler scheme (2.2); the integral of error is calculated by
rectangular integration:
I
z
−1
=
T
c
1− z
−1
(9)
To further illustrate the performance of the fuzzy
PD
β
+I a saturation nonlinearity is included in the
closed-loop system of Fig.1, and inserted in series
with the output of the fuzzy controller. The satura-
tion element is defined as:
n(u) =
u, |u| < δ
δ sign(u), |u| ≥ δ
(10)
where u and n are respectively the input and the out-
put of the saturation block and sign(u) is the signum
function.
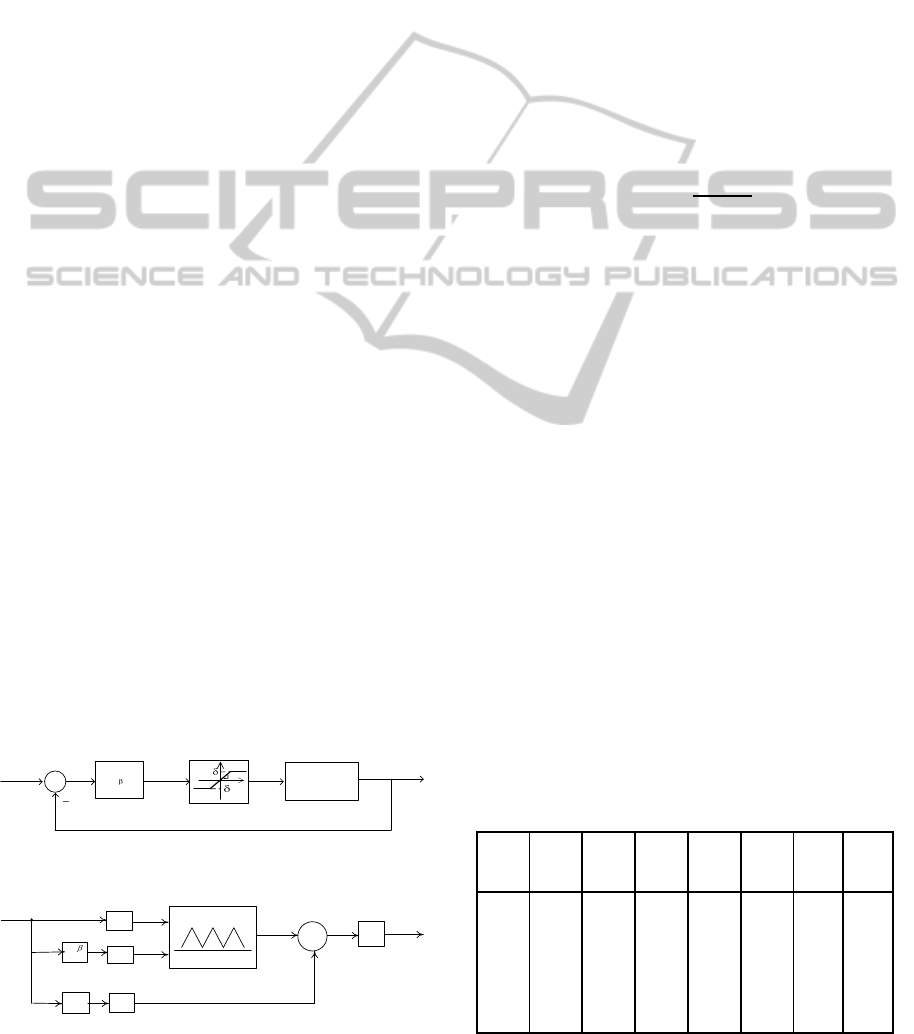
Here we give an emphasis of the proposed FLC
presented in Fig. 2. The basic structure for FLC is
illustrated in Fig. 3 (Passino and Yurkovich, 1998).
The fuzzy rule base, which reflects the collected
knowledge about how a particular control problem
must be treated, is one of the main components of a
fuzzy controller. The other parts of the controller per-
form make up the tasks necessary for the controller to
be efficient.
For the fuzzy PD
β
+I controller illustrated in Fig.2,
the rule-base can be constructed in the following form
(see Table 1):
If E is NM and CE is NS Then v is NL
Table 1: Fuzzy control rules.
E \ NL NM NS ZR PS PM PL
CE
NL NL NL NL NL NM NS ZR
NM NL NL NL NM NS ZR PS
NS NL NL NM NS ZR PS PM
ZR NL NM NS ZR PS PM PL
PS NM NS ZR PS PM PL PL
PM NS ZR PS PM PL PL PL
PL ZR PS PM PL PL PL PL
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
284
Fuzzification
Defuzzification
Fuzzy rule
base
Fuzzy
inference
Input
Output
Figure 3: Structure for fuzzy logic controller.
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
Degree of membership
NL NM NS
ZR PS PM PL
Figure 4: Membership functions for E, CE and v.
where NL, NM, NS, ZR, PS, PM, and PL are lin-
guistic values representing ”negative low”, ”negative
medium” and so on, E is the error, CE is the frac-
tional derivative of error and v is the output of the
fuzzy PD
β
controller. The membership functions for
the premises and consequents of the rules are shown
in Fig. 4.
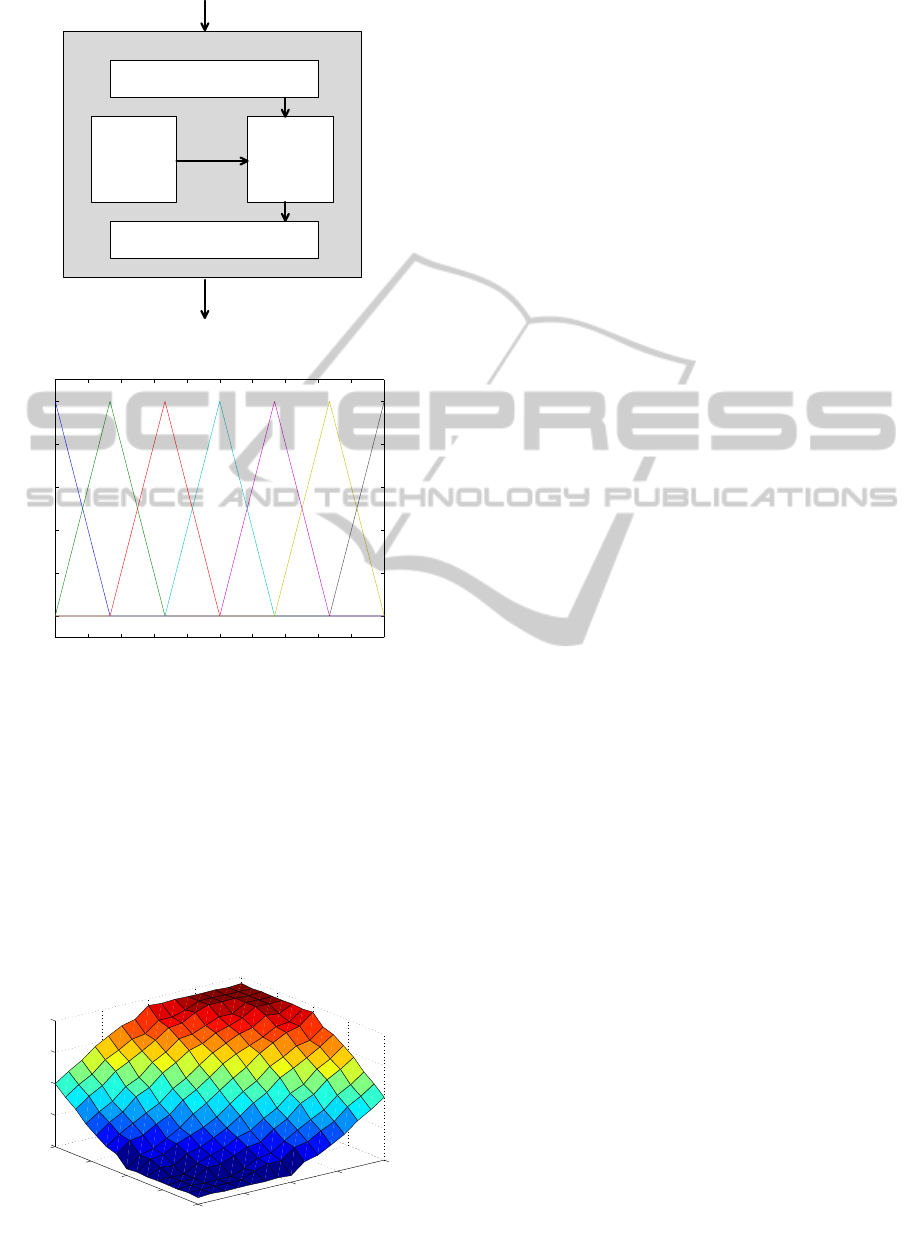
With two inputs and one output the input-output
mapping of the fuzzy logic controller is described by
a non linear surface, presented in Fig.5.
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
E
CE
v
Figure 5: Control surface.
The fuzzy controller will be adjusted by changing the
parameter values of K
e
, K
ce
, K
ie
and K
u
. The fuzzy
inference mechanism operates by using the product
to combine the conjunctions in the premise of the
rules and in the representation of the fuzzy implica-
tion. For the defuzzification process we use the cen-
troid method.
3.3 Genetic Optimization
A genetic algorithm (GA) is a search process for find-
ing approximate solutions in optimization problems.
GAs are a particular class of algorithms that use tech-
niques inspired by evolutionary biology such as inher-
itance, mutation, natural selection, and crossover, es-
tablished by the Darwin’s theory of evolution. Some
applications of GAs are in the field of robotics, non-
linear dynamical systems, data analysis, engineering
and many others in the real world applications (Gold-
berg, 1989; Michalewicz, 1996; Jesus and Machado,
2009).
In this work we propose a fuzzy fractional PD
β
+I
controller, where the gains will be tuned through the
application of a GA, in order to achieve a superior
control performance of the control system of Fig.
1. The optimization fitness function corresponds to
the minimization of the integral time absolute error
(ITAE) criteria, that measure the response error as de-
fined as (Jesus and Machado, 2009):
J(K
e
,K
ce
,K
ie
,K
u
) =
∞
Z
0
t |r(t) − c(t)|dt (11)
where (K
e
, K
ce
, K
ie
, K
u
) are the PD
β
+I controller pa-
rameters to be optimized.
4 SIMULATIONS
In this section we analyze the closed-loop system of
Fig. 1 with a fuzzy fractional PD
β
+ I controller (Fig.
2). In all the experiments, the fractional order deriva-
tive D
β
in scheme of Fig. 2 is implemented by us-
ing a 4
th
order Pad´e discrete rational transfer function
(m = n = 4) of type (5). It is used a sampling period
of T
c
= 0.01 s. The PD
β
+I controller is tuned through
the minimization of the ITAE (11) using a GA. We
use δ = 15.0. We establish the following values for
the GA parameters: population size P = 20, crossover
probability C = 0.8, mutation probability M = 0.05
and number of generations Ng = 50.
In the first case, we compare a fuzzy fractional
PD
β
controller which leads to the lower error (β =
TuningofFuzzyFractionalPDb+IControllersbyGeneticAlgorithm
285
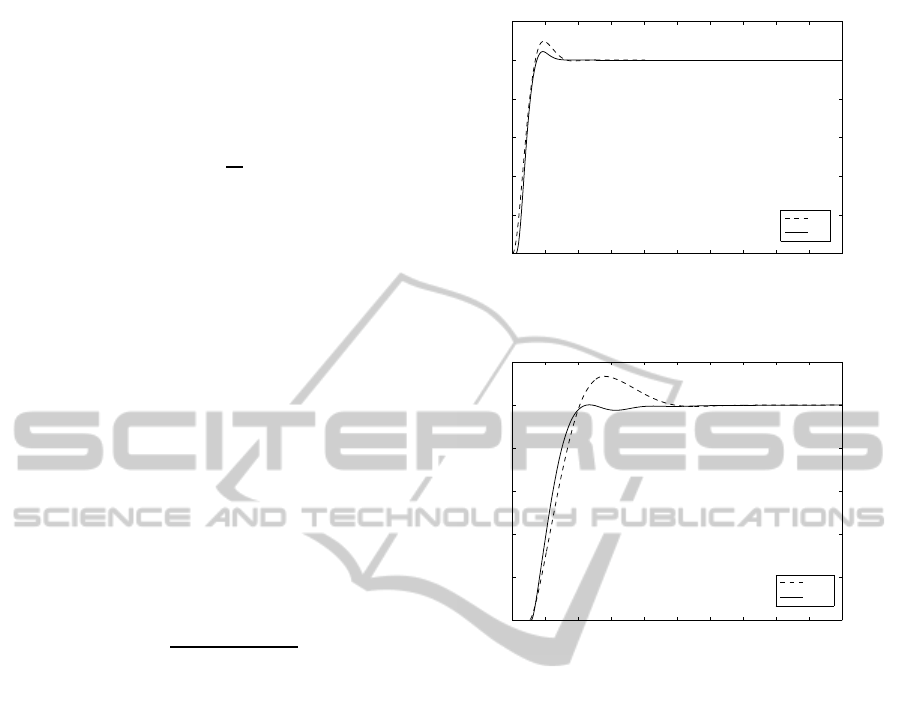
0.8,K
ie
= 0), with a fuzzy integer PD controller (β =
1,K
ie
= 0). Figure 6 shows the unit step responses
of both controllers. The plant system G
1
(s) used is
represented by the transfer function:
G
1
(s) =
1
s
2
(12)
The controller parameters, corresponding to the mini-
mization of the ITAE index, lead to the values for the
fuzzy integer PD controller: {K
e
, K
ce
, K
u
} ≡ {0.8675,
0.5062, 4.5817}, with J = 0.5416, and for the fuzzy
fractional PD
β
controller to the following values:{K
e
,
K
ce
, K
u
} ≡ {1.1459, 1.4110, 4.9945}, with J =
0.3063. These values lead us to conclude that the
fuzzy fractional order controller produced better re-
sults than the integer one, since the transient response
(namely, the overshootand settling time) and the error
J are smaller, as can be seen in Fig. 6.
In a second experiment, we consider a fuzzy
PD
β
+I controller which leads for lower error to β =
0.5, applied to a process G
2
(s) represented by the
transfer function (13), where the time delay is T = 1
[s].
G
2
(s) =
e
−sT
0.2s
2
+ 1.2s+ 1
(13)
Once more time, we consider for comparison the cor-
responding integer version (β = 1). Figure 7 shows
the unit step responses of both controllers.
The controller parameters, corresponding to the
minimization of the ITAE index, lead to the val-
ues for the fuzzy integer controller: {K
e
, K
ce
, K
ie
,
K
u
} ≡ {1.1592, 0.2314, 1.2576, 0.3681}, with J =
6.3940, and for the fuzzy fractional controller: {K
e
,
K
ce
, K
ie
, K
u
}≡ {0.1247, 0.8682, 0.5906, 0.6945},
with J = 3.7972. These values lead us to remain the
previously conclusions drawn for G
1
(s), namely that
the fuzzy fractional order controller produced better
results than the integer ones, since the transient re-
sponse (in particular the rise time and overshoot) and
the error J are smaller.
In conclusion, with the fuzzy fractional PD
β
+I
controller we get the best controller tuning, supe-
rior to the performance revealed by the integer-order
scheme. Moreover, we prove the effectiveness of this
control structure when used in systems with time de-
lay. In fact, systems with time delay are more dif-
ficult to be controlled with the classical methodolo-
gies, however the proposed algorithm reveals that is
very effective in the control of this type of systems.
0 2 4 6 8 10 12 14 16 18 20
0
0.2
0.4
0.6
0.8
1
1.2
time [s]
c (t)
PD
PD
β
Figure 6: Step responses of the closed-loop system, with
fuzzy PD and PD
β
(β = 0.8) controllers.
0 2 4 6 8 10 12 14 16 18 20
0
0.2
0.4
0.6
0.8
1
1.2
time [s]
c (t)
PD+I
PD
β
+I
Figure 7: Step responses of the closed-loop system, with
fuzzy PD+I and PD
β
+I (β = 0.5) controllers.
5 CONCLUSIONS
This paper presented the fundamental aspects of ap-
plication the FC theory in the control systems. In this
line of thought, it were studied several systems. The
dynamics of the systems were analyzed in the per-
spective of FC, with the use of a fuzzy PD
β
+I con-
troller in which the parameters were tuned through a
GA algorithm.
In general, the control strategies presented, give
better results than those obtained with conventional
integer control structures, showing its effectiveness in
the control of nonlinear systems.
ACKNOWLEDGEMENTS
This work is supported by FEDER Funds through
the ”Programa Operacional Factores de Competitivi-
dade - COMPETE” program and by National Funds
through FCT ”Fundac¸˜ao para a Ciˆencia e a Tecnolo-
gia.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
286

REFERENCES
Barbosa, R. S. (2010). On linear fuzzy fractional pd and
pd+i controllers. In The 4th IFAC Workshop Frac-
tional Differentiation and its Applications - FDA10,
Badajoz, Spain.
Barbosa, R. S., Jesus, I. S., and Silva, M. F. (2010). Fuzzy
reasoning in fractional-order pd controllers. In Inter-
national Conference on New Aspects Of Applied In-
formatics, Biomedical Electronics & Informatics And
Communications, Taipe, Taiwan.
Barbosa, R. S., Machado, J. A. T., and Silva, M. F. (2006).
Time domain design of fractional differintegrators us-
ing least-squares. Signal Processing, 86 (10):2567–
2581.
Carvajal, J., Chen, G., and Ogmen, H. (2000). Fuzzy
pid controller: Design, performance evaluation, and
stability analysis. Journal of Information Science,
123:249–270.
Chen, Y., Vinagre, B. M., and Podlubny, I. (2004). Contin-
ued fraction expansion to discretize fractional order
derivatives-an expository review. Nonlinear Dynam-
ics, 38 (1–4):155–170.
Das, S., IndranilPan, Das, S., and Gupta, A. (2012). A novel
fractional order fuzzy pid controller and its optimal
time domain tuning based on integral performance in-
dices. Journal Engineering Applications of Artificial
Intelligence, 25:430–442.
Delavari, H., Ghaderi, R., Ranjbar, A., and Momani, S.
(2010). Fuzzy fractional order sliding mode controller
for nonlinear systems. Communications in Nonlinear
Science and Numerical Simulation, 15:963–978.
Eker, I. and Torun, Y. (2006). Fuzzy logic control to be
conventional methods. Journal of Energy Conversion
and Managment, 47:377–394.
Goldberg, D. E. (1989). Genetic Algorithms in Search Op-
timization and Machine Learning. Addison-Wesley.
Jesus, I. S. and Machado, J. A. T. (2008). Fractional control
of heat diffusion systems. Journal Nonlinear Dynam-
ics, 54(3):263–282.
Jesus, I. S. and Machado, J. A. T. (2009). Implemen-
tation of fractional-order electromagnetic potential
through a genetic algorithm. Journal of Communica-
tions in Nonlinear Science and Numerical Simulation,
14:1838–1843.
Machado, J. A. T. (1997). Analysis and design of fractional-
order digital control systems. SAMS Journal Systems
Analysis, Modelling, Simulation, 27:107–122.
Mainardi, F. and Gorenflo, R. (2000). Mittag-leffler-type
functions in fractional evolution processes. Journal of
Comput. and Appl. Mathematics, 1-2:283–299.
Michalewicz, Z. (1996). Genetic Algorithms + Data Struc-
tures = Evolution Programs. Springer-Verlag.
Mizumoto, M. (1995). Realization of pid controls by fuzzy
control methods. Journal of fuzzy sets and systems,
70:171–182.
Oldham, K. B. and Spanier, J. (1974). The Fractional Cal-
culus: Theory and Application of Differentiation and
Integration to Arbitrary Order. Academic Press, New
York.
Padula, F. and Visioli, A. (2011). Tuning rules for optimal
pid and fractional-order pid controllers. Journal of
Process Control, 21:69–81.
Passino, K. M. and Yurkovich, S. (1998). Fuzzy Control.
Addison-Wesley, Menlo Park, California.
Podlubny, I. (1999a). Fractional Differential Equations.
Academic Press, San Diego.
Podlubny, I. (1999b). Fractional-order systems and pi
λ
d
µ
-
controllers. IEEE Transactions on Automatic Control,
44 (1):208–213.
Tian, X., Huang, Y., and Zhang, C. (2010). The tuning prin-
ciple of adaptive fuzzy fractional-order pid controller
parameters. Procedia Engineering, 7:251255.
TuningofFuzzyFractionalPDb+IControllersbyGeneticAlgorithm
287
