
Increasing Efficiency of ISO 26262 Verification and Validation
by Combining Fault Injection and Mutation Testing with Model
based Development
Rakesh Rana
1
, Miroslaw Staron
1
, Christian Berger
1
, Jörgen Hansson
2
,
Martin Nilsson
3
and Fredrik Törner
3
1
Computer Science & Engineering, University of Gothenburg, Gothenburg, Sweden
2
Computer Science & Engineering, Chalmers University of Technology, Gothenburg, Sweden
3
Volvo Car Corporation, Gothenburg, Sweden
Keywords: Fault Injection, Mutation Testing, ISO 26262, Simulink, Model based Development, Automotive Domain,
Safety Critical Software.
Abstract: The rapid growth of software intensive active safety functions in modern cars resulted in adoption of new
safety development standards like ISO 26262 by the automotive industry. Hazard analysis, safety
assessment and adequate verification and validation methods for software and car electronics require effort
but in the long run save lives. We argue that in the face of complex software development set-up with
distributed functionality, Model-Based Development (MBD) and safety-criticality of software embedded in
modern cars, there is a need for evolving existing methods of MBD and complementing them with methods
already used in the development of other systems (Fault Injection and Mutation Testing). Our position is
that significant effectiveness and efficiency improvements can be made by applying fault injection
techniques combined with mutation testing approach for verification and validation of automotive software
at the model level. The improvements include such aspects as identification of safety related defects early in
the development process thus providing enough time to remove the defects. The argument is based on our
industrial case studies, the studies of ISO 26262 standard and academic experiments with new verification
and validation methods applied to models.
1 INTRODUCTION
Nowadays, a typical premium car has up to 70 ECUs
which are connected by several system buses to
realize over 2000 functions (Broy, 2006). As around
90% of all innovations today are driven by
electronics and software, the complexity of car’s
embedded software is already high and expected to
grow further. The growth is fuelled by cars
beginning to act more proactively and provide more
assistance to its drivers, which requires software to
interact with hardware more efficiently and making
more decisions automatically (e.g. collision
avoidance by braking, brake-by-wire or similar
functions). In total with about 100 million lines of
code (SLOC), premium segment vehicles carry more
software code than in modern fighter jets and
airliners (Charette, 2009).
Software for custom functionality in modern cars is
usually developed by multiple suppliers although it
is largely designed by a single OEM (Original
Equipment Manufacturer) like Volvo Cars. The
distributed development and use of standards like
AUTOSAR aims to facilitate reuse of software and
hardware components between different vehicle
platforms, OEMs and suppliers (Fennel et al., 2006).
However, testing of such systems is more complex
and even today testing of software generally
accounts for almost 50% of overall development
costs (Boehm and Basili, 2001).
ISO-26262 in automotive domain poses stringent
requirements for development of safety critical
applications and in particular on the testing
processes for this software. These requirements are
intended to increase the safety of modern cars,
although they also increase the cost of modern cars.
251
Rana R., Staron M., Berger C., Hansson J., Nilsson M. and Törner F..
Increasing Efficiency of ISO 26262 Verification and Validation by Combining Fault Injection and Mutation Testing with Model based Development.
DOI: 10.5220/0004592002510257
In Proceedings of the 8th International Joint Conference on Software Technologies (ICSOFT-EA-2013), pages 251-257
ISBN: 978-989-8565-68-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
The position for which we argue in this paper is that
efficient verification and validation of safety
functions requires combining Model Based
Development (MBD) with fault injection into models
with mutation testing. This position is based on the
studies of the ISO 26262 standard (mainly chapter 6
that describes requirements on software
development but also chapter 4, which poses
requirements on product development (ISO 26262 -
2011, 2011)). It is also based on previous case
studies of the impact of late defects on the software
development practices in the automotive domain
(e.g. (Mellegård et al., 2013))
The requirements from the ISO 26262 standard
on using fault injection techniques is challenging
since it relates to the development of complete
functions rather than components or sub-components
of software. The current situation in the automotive
sector is that fault injection is used, but it is used at
the level of one electronic component (ECU) or one
software system and rarely at the function level
(Hillenbrand et al., 2010; Schätz, 2010).
The current state of art testing is not enough for
detecting safety defects early in the automotive
software development process since fault injection is
done late in the development (when ECUs are being
developed), which usually makes the detection of
specification-related defects difficult and costly
(Mellegård et al., 2013). As much possible this
detection should be done at the model level when the
ECUs’ functionality is still under design and thus, it
is relatively cheap to redesign/reconfigure. The
evidence from literature on successful use of fault
injection shows that the techniques are indeed
efficient in finding dependability problems of
hardware and software systems when applied to
compute (Hsueh et al., 1997). Finally, to be able to
increase the effectiveness of the fault injection
strategies and identify whether the faults should be
injected at the model, software or ECU level -
Mutation testing should be applied to verify the
adequacy of test cases and finally how the
combination of these approaches when applied at the
model level will enhance the detection of safety
defects right at the design stage.
In this paper, we provide a roadmap, which
shows how to introduce fault injection and mutation
testing to modelling of automotive software in order
to avoid costly late defects and increase the safety of
modern and future cars.
The remaining of the paper is structured as
follows: In the next section (2) we provide an
overview of software development in automotive
domain and associated concepts. This is followed by
brief discussion on related work in section 3 and our
position is presented and discussed in section 4.
Section 5 concludes our work.
2 BACKGROUND
In this section we take a brief overview on the
current state of automotive software development
process and environment, how safety is important in
safety critical applications and overview of
theoretical background on fault injection techniques
and mutation testing.
2.1 Automotive Software
Development & ISO 26262
Various software functions/applications developed
within the automotive industry today are classed as
safety critical, for example Volvo’s City Safety
feature consists of components that are safety
critical.
Figure 1: Volvo Cars city safety function, image provided
by Volvo Car Corporation.
(Broy, 2006) gives examples of functions/areas
within automotive domain with recent development
which includes crash prevention, crash safety,
advanced energy management, adaptable man-
machine interface, advanced driver assistance,
programmable car, car networking etc., much of
these also fall within the safety critical functionality
and thus demands high quality and reliability. Also a
number of on-going projects are directed towards the
goal of self-driving cars.
Software development in automotive sector in
general follows the ‘V’ process, where OEMs take
the responsibility of requirement specification,
system design, and integration/acceptance testing.
This is followed by the supplier, which develops the
actual code that runs on ECUs. Although the code is
tested at the supplier level (mainly unit testing), the
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
252

OEMs are responsible for the final integration,
system and acceptance testing to ensure that the
given implementation of a software (SW) meets its
intended functional and safety goals/demands.
Figure 2: The V-model in the automotive industry with
distinction between the OEM and supplier contributions.
In this model of software/product development
(see Figure 2) testing is usually concentrated in the
late stages of development, which also implies that
most of the defects are discovered late in the
development process. In a recent study using real
defect data from an automotive software project
from the industry (Mellegård et al., 2012) showed
that late detection of defects is still a relevant
problem and challenge yet to overcome. The defect
inflow profile presented in this study is reproduced
in Figure 3 for reference, which exhibits a clear peak
in number of open defects in the late stages of
function development/testing.
Figure 3: Defect inflow profile for automotive software
project, as given in (Mellegård et al., 2012).
Testing the software is an important tool of
ensuring correct functionality and reliability of
systems but it is also a very resource intensive
activity accounting for up to 50% of total software
development costs (Jones, 2001) and even more for
safety/mission critical software systems. Thus
having a good testing strategy is critical for any
industry with high software development costs. It
has also been shown that most of the defects
detected during testing do not depend on actual
implementation of code, about 50% of defects
detected during testing in the study by (Megen and
Meyerhoff, 1995), were found during the test
preparation, an activity independent of the
executable code. And since automotive sector has
already widely adopted MBD for the software
development of embedded systems, a high potential
exists for using the behavioural modes developed at
the early stages of software development for
performing some of the V&V (Verification &
Validation). Early V&V by helping to detect defects
early will potentially save significant amount of cost
for the projects and reduce the cycle time.
2.2 ISO 26262
ISO/IEC 26262 is a standard describing safety
requirements. It is applied to safety-related systems
that include one or more electrical and/or electronic
(E/E) systems. The overview of safety case and
argumentation is represented in Figure 4, based on
(ISO 26262 - 2011, 2011).
Figure 4: Overview of ISO-26262 safety case &
argumentation process.
Written specifically for automotive
domain/sector, the ISO-26262 standard is adapted
for the V-model of product development
corresponding to the current practice in the industry.
The guidelines are laid out for system design,
hardware and software design & development and
integration of components to realize the full product.
ISO-26262 includes specifications for MBD and
provides recommendations for using fault injection
techniques for hardware integration and testing,
software unit testing, software integration testing,
hardware-software integration testing, system
Item
•Theitemrepresentingasystemorafunctionis
defined.
PHA
•APreliminaryHazardAnalysis&RiskAssessmentis
donetoassignanappropriateASILlevel.
SG
•SafetyGoalsarederivedfromtheHazardAnalysis
andtheyinherittheassignedASILlevel.
FSR
•FunctionalSafetyRequirementsaredrawnsuchthat
thesetSafetyGoalsaremet.
TSR
•TheTechnicalSafetyRequirementsareformulated
describinghowtoimplementFSR.
Doc
•Furtherdevelopmentincludesimplementation,
integrationanddocumentationofsafetycases.
IncreasingEfficiencyofISO26262VerificationandValidationbyCombiningFaultInjectionandMutationTestingwith
ModelbasedDevelopment
253
integration testing and vehicle integration testing, for
overview on fault injection recommendations in
ISO-26262 see (Rana et al., 2013). Although the
functional safety standard specifies clearly the
recommendations for using fault injection during
various stages of testing but it does not recommend
anything with respect to using mutation testing. This
also reflects the current standard practice within the
automotive industry where mutation testing is not
widely adopted yet.
2.3 Fault Injection
Fault injection techniques are widely used for
experimental dependability evaluation. Although
these techniques have been used more widely for
assessing the hardware/prototypes, the techniques
are now about to be applied at behavioural models of
software systems (Svenningsson et al., 2010) - thus
enabling early verification of intended functionality
as well as enhancing communication between
different stakeholders. Fault injection techniques
applied at models level offer distinct advantages
especially in an industry using MBD for its software
development, but use of these techniques at model
level in automotive industry is currently at its
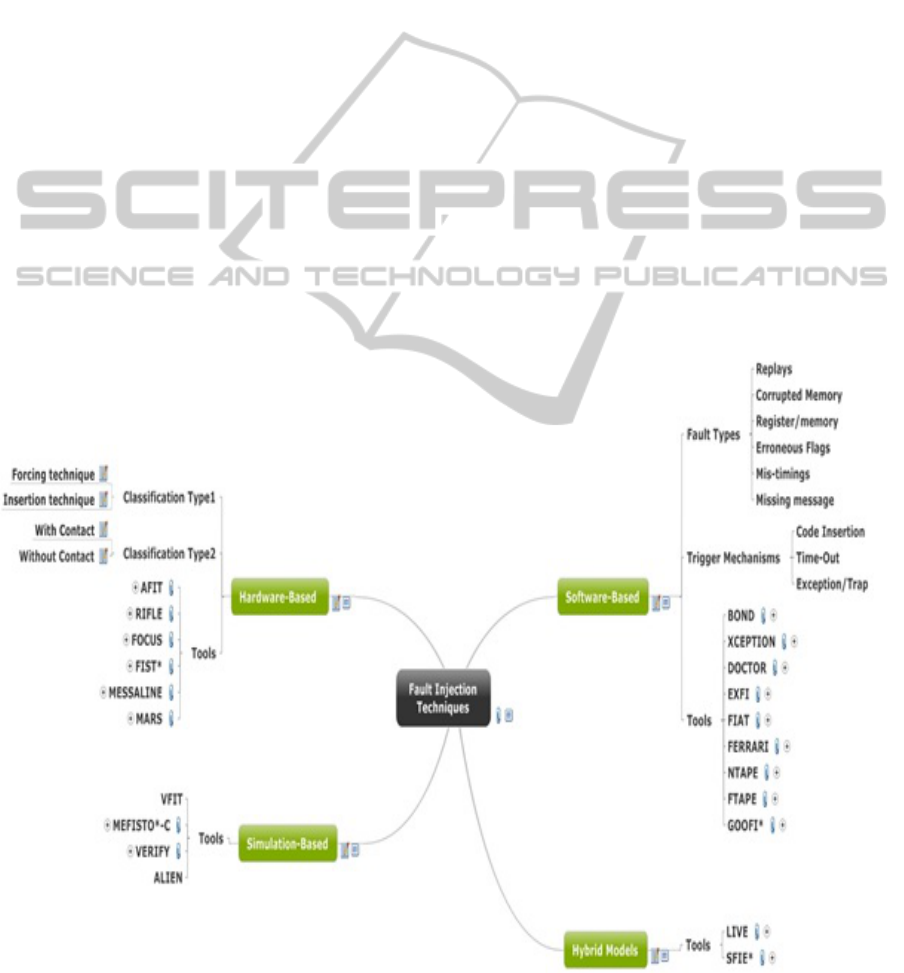
infancy. Figure 5 shows a mind map of classification
of fault injection techniques based on how the
technique is implemented; some of the tools which
are developed based on given approach are also
listed for reference. For a good overview of fault
injection techniques readers are referred to (Hsueh et
al., 1997; Ziade et al., 2004).
2.4 Mutation Testing
Mutation testing is technique for assessing the
adequacy of given test suite. Mutation testing
includes injection of systematic, repeatable seeding
of faults in large number thus generating number of
copies of original software artefacts with artificial
fault infestation (called a mutant). Percentage of
mutations detected by the given test cases/suite is a
metrics (called “mutation adequacy score” (Jia and
Harman, 2011)) used for measuring effectiveness of
the given test suite. The variants of code (faults) can
be introduced by hand or auto-generated using tools
like Insure++, Plextest, Certitude, ESPT for C/C++
codes. It has been shown that the use of mutants
Figure 5: Common classification of fault injection techniques and implementation tools, description available in (Ziade et
al., 2004; Hsueh et al., 1997).
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
254

yields trustworthy results (Andrews et al., 2005), i.e.
mutants do reflect characteristics of real faults.
Mutation theory is based on two fundamental
hypotheses namely Competent Programmer
Hypothesis and the Coupling Effect, both introduced
by (DeMillo et al., 1978). The Competent
Programmer hypothesis reflects the assumption that
programmers are competent in their job and thus
would develop programme close to correct version
(although making a number of mistakes) while the
Coupling Effect hypothesis means that complex
mutants are coupled to simple mutants in such a way
that a test data that detects large percent of simple
faults is also effective in detecting high percentage
of the complex defects” (Offutt, 1992).
3 RELATED WORK
A number of European Union sponsored projects,
within the area of embedded software development
and safety critical systems have looked at and
developed techniques to effectively use fault
injection for safe and reliable software development.
The examples include the ESACS (Enhanced Safety
Assessment for Complex Systems) (Joshi and
Heimdahl, 2005) and the ISAAC (Kakade et al.,
2010)(Improvement of Safety Activities on
Aeronautical Complex systems). These projects
have used the SCADE (Safety-Critical Application
Development Environment) modelling environment
to simulate hardware failure scenarios to identify
fault combinations that lead to safety case violations.
A model-implemented fault injection plug-in to
SCADE called FISCADE is introduced in (Vinter et
al., 2007). The plug-in tool utilizes approach similar
to mutation based testing, where it replaces the
original model operators by their equivalent fault
injection nodes. The derived models are then used to
inject the fault during execution and log the results
which are analysed later. Dependability evaluation
of automotive functions using model based software
implemented fault injection techniques have also
been studied in (Plummer, 2006).
A generic tool capable of injecting various types
of faults on the behavioural/functional Simulink
models is also developed and introduced in
(Svenningsson et al., 2010). The tool called MODIFI
(or MODel-Implemented Fault Injection tool) can be
used to inject single or multiple point faults on
behavioural models, which can be used to study the
effectiveness/properties of fault tolerant system and
identify the faults leading to failure by studying the
fault propagation properties of the models.
Another work (Brillout et al., 2010) with its root in
the European CESAR (Cost-efficient methods and
processes for safety relevant embedded systems)
project provides a good theoretical overview of how
fault and mutation based test coverage can be used
for automated test case generation for Simulink
models. We provide a practical framework on how
fault injection combined with mutation testing
within an MDB environment can be used in the
industry. And how will this practice enhance the
verification and validation of software under
development, its functional validation that would
generates statistics for the effective argumentation of
ISO 26262 compliance.
4 ROAD MAP FOR EARLY
DEFECT DETECTION
We contend that fault injection can be effectively
used at the model level to verify and validate the
attainment or violation of safety goals. We also
propose that it should be complemented with
mutation testing approach at the model level to
provide enough statistical evidence for argumenting
the fulfilment of safety goals as per the ISO-26262
safety standard requirements.
A major challenge in successful argumentation
of ISO-26262 compliance is to provide statistical
evidence that safety goals (SGs) would not be
violated during operation and collecting the
evidence for this argumentation within reasonable
testing efforts.
If we are able to differentiate early between
defects that can cause the violation of SGs and those
that cannot cause the violation, the amount of testing
required will be manageable. With MBD the
functional testing could be done using fault injection
techniques and this can be complemented with later
system testing of the actual code using the mutation
testing approach.
The framework on how this could be achieved in
practice is as follows:
Figure 6: MBD based representation of a general system
with inputs, outputs and dependencies.
IncreasingEfficiencyofISO26262VerificationandValidationbyCombiningFaultInjectionandMutationTestingwith
ModelbasedDevelopment
255

As illustrated in Figure 6, a given system/function
generally have following common features (in
context of model based development): firstly it will
have x inputs (i
1,2…x
); it would have dependencies to
other y components/ functions (d
1,2…y
); it will have z
outputs (o
1,2…z
); and it will have a number of sub-
units/modules within it that implement the intended
functionality, let us assume that this part contains n
basic blocks in the modelling environment
corresponding to n statements for a hand written
code. To verify and validate the correct functionality
and ISO-26262 compliance of this generic function
using fault and mutation testing approach we can
follow the steps as:
a. Assign or define the technical safety
requirements (TSRs) corresponding to the
functional safety requirements (FSRs) for the
given system/function to its z outputs.
b. Use fault injection techniques to inject faults
which are similar to commonly occurring
defects and other possible fault conditions at
the x inputs of the function.
c. Fault scenarios that leads to violation of
TSRs/FSRs are identified, statistics are built on
what percentage of total faults lead to such
failures and fault propagation properties of
such cases are studied to build the fault
tolerance within the system for given fault
conditions.
d. Repeat steps (b) & (c) to test, correct and
validate the given system/function for its
dependencies on other functions/components.
e. Cause mutations to the n basic blocks of given
functional model and asses the detection
effectiveness of test suite/cases for possible
implementation bugs.
f. Examine the mutants which are not killed by
given set of test cases/suits for their effect on
FSRs. If a given mutation violates the FSRs
then a suitable test case is created to detect/kill
such mutants, i.e. detect such bugs in actual
code.
By following the above mentioned steps we not only
ensure that the given function holds the FSRs and
TSRs under faulty inputs, but we can also prevent
potential implementation defects and ensure that we
have test cases ready to catch such faults that can
potentially violate the FSRs/TSRs already at the
design (model) level.
It is also worthwhile to note here that steps (a) to (e)
can be easily automated using the currently available
testing methodologies, which makes the usability
and industrial viability much higher that testing
frameworks requiring high manual interventions.
Further to make this framework/approach more
effective in industrial practice we identify a number
of best practices that will have positive impact on
detecting defects early in the development process
and thus have effective V&V of ISO-26262:
a. The best practice is to build and maintain
models corresponding to each abstraction layer
of software architecture.
b. The next best practice is to specify and test
these models for FSRs and TSR at the
appropriate abstraction level.
c. Also identification of different types of
defects/faults and at what stage they could be
modelled/injected in the behavioural models
would ensure that models are tested for these
faults at the earliest - leading to models being
build that are robust right from the start instead
of adding fault tolerance properties in the later
stages of development.
5 CONCLUSIONS
The development of software in the automotive
domain has widely adopted the paradigm of model
based development to allow for easier integration of
functionality usually developed by multiple
suppliers. By the nature of the domain much of the
functionality developed and implemented in cars is
safety critical; the criticality that requires
observation of stringent quality assessment and
adherence to functional safety standards such as ISO
26262.
Development of behavioural models in MBD
offers significant opportunity to do functional testing
early in the development process. Fault injection and
mutation testing approach in combination can be
used to effectively verify and validate the functional
properties of a software system/function. The
approach also provides required statistics for the
argumentation of safety standards compliance. In
this paper the need for such validation and a
framework on how this could be achieved in practice
is discussed. The results are a roadmap for further
research and tool support to bring this approach into
wider industrial adoption.
By detecting defects early and being able to do
much of verification and validation of intended
functionality, robustness and compliance to safety
standards on the models – the quality and reliability
of software in automotive domain can be
significantly enhanced. Effective approaches and
tools support reduce the V&V costs and lead to
shorter development times.
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
256

ACKNOWLEDGEMENTS
The work has been funded by Vinnova and Volvo
Cars jointly under the FFI programme (VISEE,
Project No: DIARIENR: 2011-04438).
REFERENCES
Andrews, J. H., Briand, L. C., Labiche, Y., 2005. Is
mutation an appropriate tool for testing experiments?
[software testing], in: Software Engineering, 2005.
ICSE 2005. Proceedings. 27th International
Conference On. pp. 402–411.
Boehm, B., Basili, V. R., 2001. Defect Reduction Top 10
List. Computer 135–137.
Brillout, A., He, N., Mazzucchi, M., Kroening, D.,
Purandare, M., Rümmer, P., Weissenbacher, G., 2010.
Mutation-based test case generation for simulink
models, in: Formal Methods for Components and
Objects. pp. 208–227.
Broy, M., 2006. Challenges in automotive software
engineering, in: Proceedings of the 28th International
Conference on Software Engineering. pp. 33–42.
Charette, R. N., 2009. This Car Runs on Code.
http://spectrum.ieee.org/green-tech/advanced-cars/this-
car-runs-on-code.
DeMillo, R. A., Lipton, R. J., Sayward, F.G., 1978. Hints
on test data selection: Help for the practicing
programmer. Computer 11, 34–41.
Fennel, H., Bunzel, S., Heinecke, H., Bielefeld, Jü, rgen,
Fü, rst, S., Schnelle, K.-P., Grote, W., Maldener, N.,
Weber, T., Wohlgemuth, F., others, 2006.
Achievements and exploitation of the AUTOSAR
development partnership. Convergence 2006, 10.
Hillenbrand, M., Heinz, M., Adler, N., Müller-Glaser,
K.D., Matheis, J., Reichmann, C., 2010. ISO/DIS
26262 in the context of electric and electronic
architecture modeling, in: Architecting Critical
Systems. Springer, pp. 179–192.
Hsueh, M. C., Tsai, T. K., Iyer, R. K., 1997. Fault
injection techniques and tools. Computer 30, 75–82.
ISO 26262 - 2011, 2011. Road vehicles -- Functional
safety -- Part 1-10.
Jia, Y., Harman, M., 2011. An analysis and survey of the
development of mutation testing. Softw. Eng. IEEE
Trans. 37, 649–678.
Jones, E. L., 2001. Integrating testing into the
curriculum—arsenic in small doses, in: ACM SIGCSE
Bulletin. pp. 337–341.
Joshi, A., Heimdahl, M. P. E., 2005. Model-based safety
analysis of simulink models using SCADE design
verifier.
Kakade, R., Murugesan, M., Perugu, B., Nair, M., 2010.
Model-Based Development of Automotive Electronic
Climate Control Software. Model. Found. Appl. 144–
155.
Megen, R., Meyerhoff, D. B., 1995. Costs and benefits of
early defect detection: experiences from developing
client server and host applications. Softw. Qual. J. 4,
247–256.
Mellegård, N., Staron, M., Tö, rner, F., 2012. A light-
weight defect classification scheme for embedded
automotive software and its initial evaluation.
Mellegård, N., Staron, M., Törner, F., 2013. A Light-
Weight Defect Classification Scheme for Embedded
Automotive Software Development.
Offutt, A. J., 1992. Investigations of the software testing
coupling effect. Acm Trans. Softw. Eng. Methodol.
Tosem 1, 5–20.
Plummer, A., 2006. Model-in-the-loop testing. Proc. Inst.
Mech. Eng. Part J. Syst. Control Eng. 220, 183–199.
Rana, R., Staron, M., Berger, C., Hansson, J., Nilsson, M.,
Törner, F., 2013. Improving Fault Injection in
Automotive Model Based Development using Fault
Bypass Modeling. Submitted To: 2nd Workshop on
Software-Based Methods for Robust Embedded
Systems, Informatik 2013, Koblenz, Germany.
Schätz, B., 2010. Certification of Embedded Software–
Impact of ISO DIS 26262 in the Automotive Domain,
in: Leveraging Applications of Formal Methods,
Verification, and Validation. Springer, pp. 3–3.
Svenningsson, R., Vinter, J., Eriksson, H., Törngren, M.,
2010. MODIFI: a MODel-implemented fault injection
tool. Comput. Saf. Reliab. Secur. 210–222.
Vinter, J., Bromander, L., Raistrick, P., Edler, H., n.d.
FISCADE - A Fault Injection Tool for SCADE
Models, in: Automotive Electronics, 2007 3rd
Institution of Engineering and Technology Conference
On. pp. 1–9.
Ziade, H., Ayoubi, R. A., Velazco, R., others, 2004. A
survey on fault injection techniques. Int Arab J Inf
Technol 1, 171–186.
IncreasingEfficiencyofISO26262VerificationandValidationbyCombiningFaultInjectionandMutationTestingwith
ModelbasedDevelopment
257
