
Response-based Control through Dynamic Optimization
in Large-scale Power Systems
Sergio Bruno, Matteo D’Aloia and Massimo La Scala
Dipartimento di Ingegneria Elettrica e dell’Informazione (DEI), Politecnico di Bari, via Re David 200, 70125, Bari, Italy
Keywords: Power Systems, Wide Area Measurement Systems, Phasor Measurement Units, Transient Security,
Dynamic Optimization, Real-time Power System Simulation.
Abstract: Modern real-time measurement equipments and associated communication/computing networks allow
developing advanced power system control architectures able to identify dangerous states of power systems,
and, when necessary, evaluate and apply remedial control actions. An approach, derived by a dynamic
optimization methodology, for evaluating response-based control actions and enhance power system
security, is presented. In this paper, studies performed for wide-area control of transient phenomena are
reviewed. Despite severe computational efforts and time requirements, the authors’ position is that the
nowadays technology can make the approach feasible.
1 INTRODUCTION
New smart technologies are the current drive for
achieving profound modifications in the way power
transmission system are built and operated. The
pervasive diffusion of power converters and flexible
systems, large storage facilities, adaptive relays,
smart meters and sensors allows the achievement of
improved levels of automation, intelligence,
monitoring and control in power systems (Momoh
2009); (Bose 2010).
A key enabling technology for such change is to
be found in Phasor Measurement Units (PMUs)
(Phadke and Thorp, 2006) whose deployment in
power systems has been possible thanks to the on-
going process of substitution of old
electromechanical relays with new digital relays,
started in the early 90s and under completion in most
advanced countries. PMUs are devices that allow to
measure synchronously electric variables (currents
and voltages, in module and phase) in several nodes
of the network, giving a real-time realistic snapshot
of system conditions and state.
According to the vision presented in (Bose et al.,
2004a; 2004b), data coming from PMUs can be
collected and elaborated in order to achieve real-
time control of power systems. The diffusion of
IEC-61850 protocol-based equipments, will
facilitate the integration of such devices into
SCADA/EMS data base and simulation tools, and
will achieve, at the same time, interoperability of all
active elements of the network (for example digital
protection relays, power converters and flexible AC
transmission systems - FACTS, remote controlled
switches, etc.).
Such real-time control architecture can be based
on a revolution of classical dynamic security
assessment (DSA) functions that are traditionally
based on off-line models and simulations and on
“event-based” predetermined control rules.
The idea is to develop powerful real-time tools
for on-line updating of power system parameters
database (usually stored in SCADA and updated
only occasionally), power system behaviour
prevision and real-time control assessment, leading
to the definition of a “response-based” real-time
control approach to power system security (Taylor et
al., 2005).
This approach is based on the integration of
dynamic optimization methodologies with modern
real-time measurement equipments (PMUs and wide
area measurement systems - WAMS) and is aimed at
evaluating real-time corrective control actions, as
soon as degraded dynamic trajectories are detected.
Since unstable transients must be controlled
within hundreds of milliseconds from the insurgence
of the fault, in order to implement “response based”
remedial actions, fast actuators are needed.
Load/generation shedding can be fast enough to
210
Bruno S., D’Aloia M. and La Scala M..
Response-based Control through Dynamic Optimization in Large-scale Power Systems.
DOI: 10.5220/0004593202100216
In Proceedings of the 3rd International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2013),
pages 210-216
ISBN: 978-989-8565-69-3
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
correct the undesirable transient behaviour (Bose et
al., 2004b) but more advanced fast control actions
can be implemented through FACTS devices (Bruno
et al., 2012a), line switching techniques (Bruno et
al., 2012b) or fast tuning of adaptive relays (Bruno
et al., 2012c). In addition, real-time tuning of
distance relays settings performed considering
actual, or forecasted, configurations of the power
system will allow to overcome the classical conflict
between dependability and security (Bruno et al.,
2011) and to avoid improper operation of such
devices in vulnerable conditions and during major
blackout events.
In this paper, the authors’ experience, devoted to
assess the feasibility of advanced power system
control architectures, is reviewed. The paper
presents the authors position about the possible
implementation of response-based control
architectures for controlling transient phenomena on
a wide geographical scale. Despite the severe
computational effort required by the response-based
simulations and the tight time requirements, the
authors’ position is that the nowadays technology
can make the approach feasible.
2 EVOLUTION OF CONTROL
ARCHITECTURES
In this section, an advanced control architecture
oriented at evaluating and implementing control
actions as soon as power system dynamic behaviour
worsens is proposed. This architecture, basing on
real-time measurements and fast simulation tools,
guarantees a substantial evolution with respect to
event-based control approaches.
2.1 Event-based Control Strategy
The control of power system stability is mainly
operated by means of automated control systems that
feedback local signals to generation unit control
systems (automatic voltage regulators, power
systems stabilizers, governor, etc.) (Kundur, 1994).
This kind of control enhance power system stability
behaviour (especially small-signal stability) but it is
not fit to ensure stability when large and severe
transients are experienced. Moreover, local control
schemes cannot provide enough information on
phenomena arising on wide geographic areas and
detectable only on wide-area spatial scale (for
example inter-area oscillations, voltage instability,
etc.).
Large oscillations and transients are usually
controlled by means of another class of controls that
includes both preventive and corrective control
approaches. These controls are operated via
SCADA/EMS by local relays or by means of Special
Protection Systems (SPS) (Taylor, 2000).
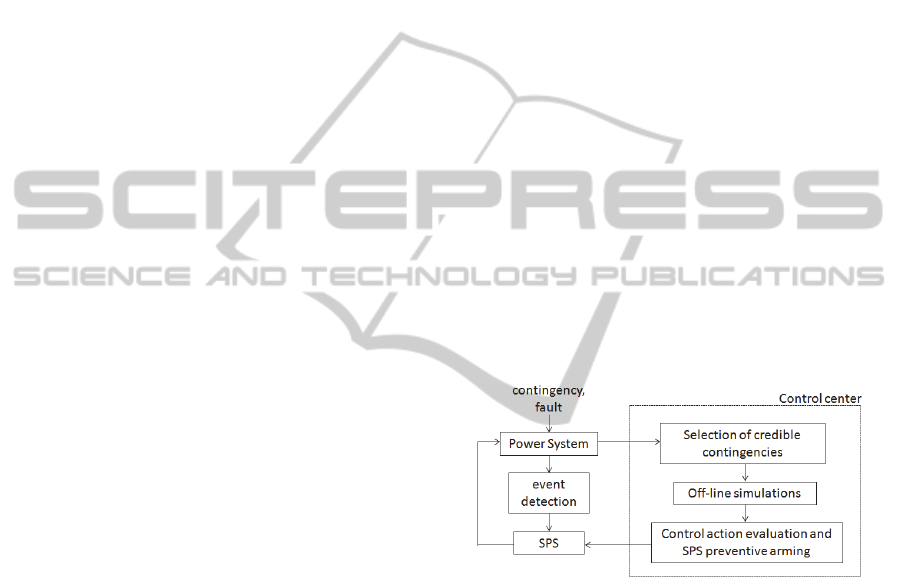
Corrective schemes operate following an event-
based control approach (Figure 1) that requires no
intervention of system operators: defence schemes
react automatically when an event is detected (event-
driven actions). SPS working principle is based on
the pre-arming of actuators that react automatically
following pre-defined control strategies at the
detection of a certain disturbance. The arming of
SPS is based on off-line (preventive) simulations,
performed on the basis of a predefined set of
postulated contingencies (event-based approach).
Since this approach is based on off-line
simulations, off-line models and on a set of
postulated contingencies, it might fail anytime
unexpected events or anomalous conditions are
experienced. The failure of the automatic load
shedding scheme called EDA (Elaboratore Distacchi
Automatici) in avoiding disaster during the major
Italian 2003 blackout is a clear example of such
problematic (Berizzi 2004); (Berizzi and Sforna
2006).
Figure 1: Event-based control strategy.
2.2 Response-based Control Approach
Given the actual availability of advanced
measurement and communication systems, it is
possible to imagine a new control architecture for
response-based control of power systems. Real-time
measurement equipments and associated
communication systems (i.e. PMU and WAMS) can
be exploited for developing such advanced control
approach.
In the proposed control scheme, power system
trajectories, acquired in real-time, allow the
identification of threats to system security and of
degraded dynamic states. If necessary, through
simulation or sensitivity analysis, suitable corrective
control actions can be evaluated and implemented
sending in real-time corrective signals to any fast
Response-basedControlthroughDynamicOptimizationinLarge-scalePowerSystems
211
actuator device (e.g. load/generation shedding
schemes, FACTS devices, line switching, adaptive
relaying).
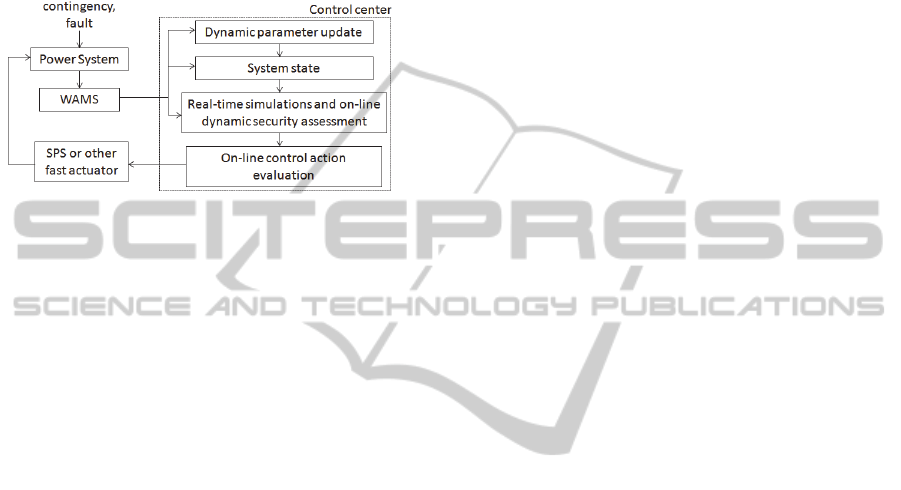
A schematic representation of a response-based
control system is given in Figure 2. Such scheme
reacts to static and dynamic constraints violations by
means of control actions calculated and
implemented on transient time-scale.
Figure 2: Response-based control approach.
A response-based control strategy, integrated
with WAMS, has the potential to grasp the whole
picture of dynamic system behaviour and perform
calculations on-the-fly on the basis of actual
dynamical state, taking also into account possible
sudden changes in grid topology of operating
conditions as usually experienced during severe
cascading events leading to major blackouts.
The proposed approach when integrated into a
WAMS architecture gives rise to what is defined
Wide Area Measurement and Control system or
WAMC.
2.3 Wide-area Measurement
and Control Architecture
The proposed WAMC architecture requires the
existence of a measurement and communication
network that collects and distributes real-time
information about system state. PMUs can be easily
located in strategic points of the system (substations,
generation points or important interconnection
points), giving real-time measurements of voltage
and current phasors, suitably synchronized through
GPS time signals.
A Phasor Data Concentrator (PDC) collects data
sent continuously by PMUs and exports
measurements as soon as they have been correlated
and normalized. Real-time data sent from all PDCs
to the Control Centre provide a coherent picture of
the system state. Data are elaborated through real-
time power system simulators reproducing power
system trajectories and detecting possible threats to
system security.
The proposed approach is based on creating a
dynamic replica of power system dynamics,
permitting the assessment of system dynamic
performances and a rapid calculation of real-time
control actions through sensitivity approaches or
through the solution of dynamic optimization
problems.
In smart transmission grids, both innovative IT
infrastructure and the standardization process have
been implemented. This scenario enables the
achievement of important objectives, such as
seamless interoperability and fast communication
and information exchange. The International
Electrotechnical Commission IEC has produced the
IEC TC57 standards reference framework that
defines two important standard families: IEC 61970,
also known as Common Information Model (CIM),
and IEC 61850 for substation communication.
Control centres, thanks to IEC TC57 standards,
can monitor and control any field device. It is
foreseeable that control centre operators will be able
to gather real-time information about any installed
device; in this scenario, a real-time updated database
of field devices can be made available for simulation
tools. Response based control can take advantage of
this possibility by improving system representation
and introducing new control functions. At the same
time, for example, remote control of field device
will made possible to implement fast actions such as
changing protection settings or remote line
switching.
3 AN ALGORITHM FOR
RESPONSE-BASED
CORRECTIVE CONTROL
The power system behaviour on transient time-scale
is generally described through a set of nonlinear
differential and algebraic equations (DAEs) (Kundur
1994):
0uVxg
uVxfx
))(),(),((
))(),(),(((t)
ttt
ttt
(1)
where x is the state vector, u is the control variable
vector, and V is the vector of nodal voltages. The
control variable vector u is given by the set-point
value (Bose et al., 2004a; 2004b) or set-point time
varying trajectory (Taylor et al., 2005) of
controllable devices and control action actuators.
The DAEs set (1) can be discretized through a
trapezoidal rule and written in implicit form as:
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
212
0uyH ),
ˆ
(
ˆ
(2)
where
Tii
ni ,,2,1,0),(
0uyH
(3)
T
TT
iii
Vxy
(4)
T
TTT
1
T
0
ˆ
T
ni
yyyyy
(5)
T
TTT
1
T
0
ˆ
T
ni
HHHHH
(6)
with y
i
representing the composition of all state
variable and voltage vectors at the generic i
th
time
step and ŷ representing the discretization of the
whole trajectory of the system; H
i
is the
discretization of the DAEs set (1) at the generic i
th
time step; n
T
is the total number of time steps
relative to the integration interval [0,T].
The methodology proposed in this paper is based
on (La Scala et al., 1998); (Bruno et al., 2002).
Corrective control actions are evaluated by solving a
dynamic optimization problem for non-linear
systems, in the presence of static and dynamic
inequality constraints. The dynamic problem is
formulated in terms of static optimization and solved
by applying the Lagrangian multipliers method.
The main difference with regard to (La Scala et
al., 1998); (Bruno et al., 2002) is that, instead of
formulating and solving a single optimization
problem, this method aims at finding the optimal
value of the control-vector u
w
that solves the
optimization problem given for each time window t
w
by the equations:
)
ˆ
()
ˆ
()(min
wPwOwU
CCC
w
yyu
u
(7)
subject to
0uyH ),
ˆ
(
ˆ
ww
(8)
and
u
w min
u
w
u
w max
(9)
In (7), ŷ
w
represents the system trajectory in the time
window t
w
, C
U
represents an objective function
aiming at the minimization of the controlling effort;
C
O
is the objective function whose scope is to
improve the dynamic behaviour of the system; C
P
is
a penalty function that takes into account inequality
constraints. Inequality constraints are usually
referred to technical and operational constraints and
define time-varying domain where system
trajectories should be contained.
The problem is solved by applying the
optimization method of Lagrangian multipliers:
),
ˆ
(
ˆ
)
ˆ
()
ˆ
()(
ww
T
wPwOwU
CCCL uyHγyyu
(10)
0
ˆ
ˆ
ˆ
)(
ˆ
w
T
w
PO
w
CC
L
y
H
γ
yy
(11)
0
ˆ
w
T
w
U
w
C
L
u
H
γ
uu
(12)
0),
ˆ
(
ˆ
ww
L
uyH
γ
(13)
From (11) and (12) derives:
ww
PO
w
U
w
CCC
L
u
H
y
H
yuu
ˆ
ˆ
ˆ
ˆ
)(
1
w
(14)
Usually, in off-line applications, the optimization
problem is solved through an iterative algorithm,
updating at each iteration the control-vector
w
wneww
L
u
uu
(15)
simulating a new dynamic trajectory, calculating a
new control vector update in a recursive approach
that stops when the sensitivity term
w
L u is lower
than a specific tolerance limit.
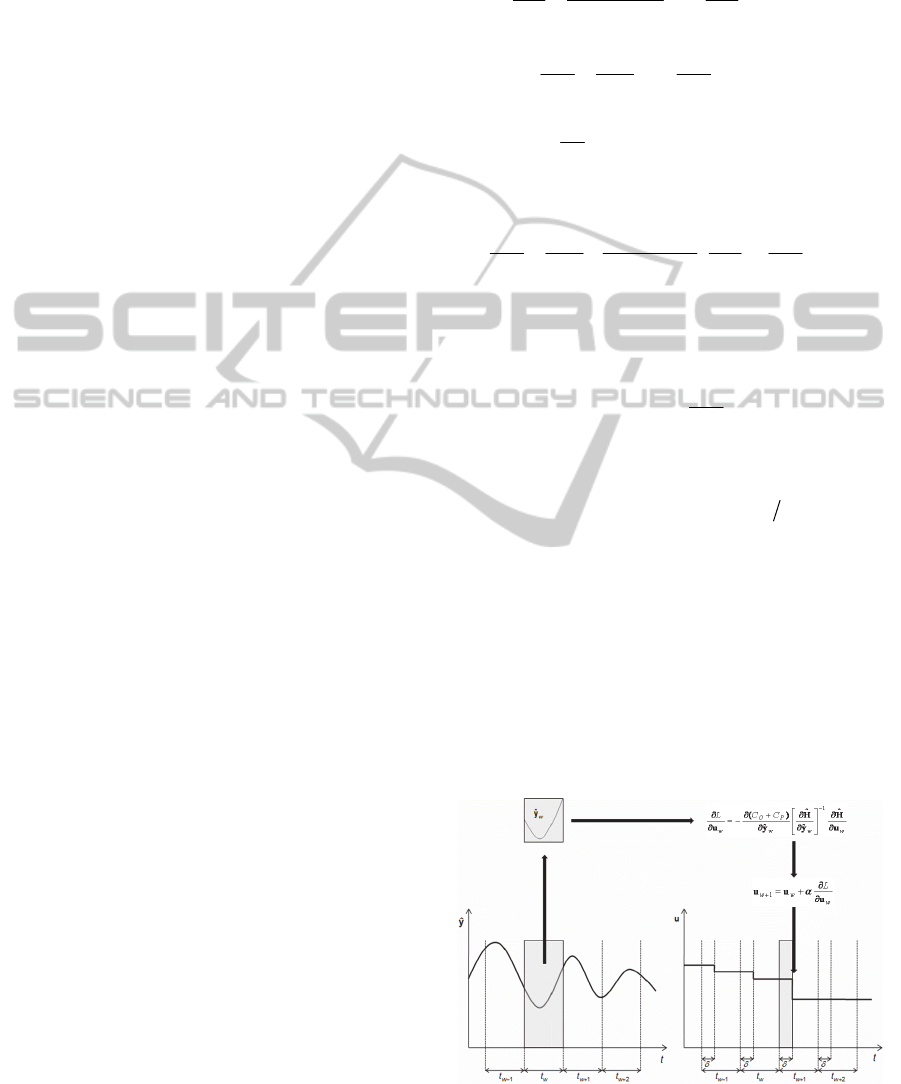
In the response-based approach presented in [4-
5], the trajectory ŷ
w
is acquired through WAMS and
cannot be modified. The control-vector u
w+1
,
evaluated optimizing ŷ
w
trajectory, can be applied
only after that the trajectory itself was acquired. The
control variable is therefore updated after each time
step with a simple sensitivity analysis as shown in
Figure 3. After the implementation of control
actions, new corrective actions are evaluated after
that a new piece of trajectory is acquired, and so on.
Figure 3: Schematization of the proposed response-based
approach.
Response-basedControlthroughDynamicOptimizationinLarge-scalePowerSystems
213

The approach in [4-5] is feasible having
considered that suboptimal solutions are still suitable
if stability is ensured in response to large
disturbances and severe threats to system integrity.
A further evolution of this approach, can be
achieved if trajectories ŷ
w
were forecasted through
powerful simulating tools before they are actually
experienced and acquired. In such case, a real-time
optimal control of power system trajectories would
be achieved. This paper embraces the opinion that
through real-time dynamic simulators, or simulators
even faster than real-time, such approach might be
possible.
An important observation on this regard is that
the approach is feasible as long as control actions
can be applied with a reasonable time delay δ. The
overall time delay δ takes into account the time
necessary for data acquisition from WAMS, data
transmission to the Control Centre, data
synchronization, CPU simulation time, data
transmission to actuators, triggering of the corrective
control actions.
4 TIME REQUIREMENTS
Some experiences have been carried out considering
a representation of the Italian power system and part
of the interconnected UCTE network. The model is
characterized by about 1333 nodes, 1762 lines, 273
generators and 769 transformers, implying that state
variables are 1638 and voltages are 2666. At each
time step 4304 variables are involved in a typical
index-1 problem. Due to the discrete time approach,
the trajectory of the system have to be evaluated for
about 10s i.e. for about 500 time steps:
Consequently the trajectory vector consists of about
1.3 millions of variables and the overall problem
(eqns. 11-13) can have the size of more than 2.6
millions of equations depending also on the number
of control variables and time discretization.
In order to assess the feasibility of the proposed
response-based control architecture, three different
tests have been carried out considering different
actuators: FACTS devices (Bose et al., 2004b) and
load shedding schemes (Bose et al., 2004a), line
switching (Bruno et al., 2012b) and adaptive
relaying (Bruno et al., 2012c); (Bruno et al., 2011).
In tests, corrective control is applied with a variable
time delay δ after the onset of the fault, in order to
understand how far it is possible to delay the
application of control actions, and still ensure
system stability. The evaluation of maximum time
delays is a key issue, permitting to assess
communication channels technical requirements,
computational time and actuators’ response speed. In
such tests, it has been assessed that time delays
around 300-500 ms are still compatible with stability
requirements for most simulated contingency cases.
4.1 Actuators
Actuation for load shedding needs about 100ms and
can be considered negligible for FACTS devices and
adaptive relaying. Our position is that delays of few
hundred milliseconds (let us say 300 ms) are enough
for response-based control to be able to correct most
of unstable behaviours. The next step is to assess if
computational and communication timings fit this
challenging requirement.
4.2 Computational Time Delay
Assessment
Since in the proposed approach, trajectories are
assumed to be known by WAMS, corrective actions
can be derived through the mere solution of the
linear system (11-12) and the consequent application
of eqn. (14). It should be considered that, in the
evaluation of the lagrangian multipliers it is not
necessary to adopt the same time step discretization
as for the evaluation of the trajectory. It was
observed that time steps equal to 0.1s are sufficient
to provide a good approximation of the trajectory of
Lagrange multipliers .
The solution of such equations, having
considered the abovementioned system model (1333
buses) and a time windows of 0.1s, requires about
0.32s on a standard PC equipped with a Intel Core2
Quad CPU Q9650 processor, 3 GHz, 4 GB RAM.
It can be concluded that CPU timings should be
more or less compatible with response based control
if reduced by a factor 4. This possibility is at hand
considering that more powerful computational
resources (supercomputers, parallel computing
environments) can be adopted. As an example, a
speed-up around 9 can be obtained through
vectorization (Granelli et al., 1993) or speed up
around 6 with message passing machines or
distributed machines equipped with 32 CPUs as
proved in (Aloisio et al., 1997).
4.3 Communication Time Delay
Assessment
Potentials of WAMS architectures and advanced
stability control architectures were investigated
during a full-scale experiment (La Scala et al. 2006).
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
214

The experiment was carried out benefiting from the
collaboration of PMU manufacturing companies and
dealt with the installation and testing of PMU
devices, and with the assessment of SPS
performances, including telemetry, monitoring and
wide-area detection.
On the basis of data acquired during the above
mentioned experiment, time performances of the
communication infrastructures have been monitored.
The overall time delay for acquiring, transmitting (to
the Control Centre) and re-transmitting (to actuators)
data has been estimated in the range 70-100ms
(25ms for each one-way data transmission) (La
Scala et al., 2006); (Naduvathuparambil et al.,
2002). This result is also consistent with results of
an Italian WAMS project (Cirio et al., 2011).
4.4 Final Observations
Performances of a centralized wide-area monitoring
architecture are not yet compatible with a response-
based control approach, since the delay associated to
data acquisition and control action implementation
may exceed the maximum delay assessed in the
previous section.
On the basis of the results obtained so far, it can
be estimated that the overall architecture would need
around 400ms for computations, 100ms for
communications and 100ms for actuating remedial
actions as an example. Thus we are close to the goal
but we did not score yet.
Our position is that computation is not the
bottleneck. Since the elapsing time related to the
dynamic sensitivity calculation can be drastically
reduced through high performance computing, we
believe that the bottleneck in the time response of
the control chain is still associated to the
communication system and to the actuators.
The position is that, fast actuators such as
FACTS devices, but also less expensive ones such as
adaptive relays, can meet the time challenge with
regards to actuation delay. More investments in the
high-speed communication infrastructure can
provide the right answer to meet the strict
requirements imposed by a centralized response-
based control architecture.
5 CONCLUSIONS
In this paper, a centralized wide-area control
architecture for evaluating and implementing
response-based corrective control actions has been
illustrated. Feasibility studies of the integration of
dynamic optimization methodologies with advanced
monitoring and control technologies have been
carried out. Moreover, the maximum acceptable
overall delay, ranging from 300 to 500 ms, has been
assessed to stabilize the Italian power grid with a
response-based control strategy.
The position is that the presence of WAMS, fast
actuators, high performance computing and high-
speed communication infrastructure can meet the
challenge of a response-based control for large scale
power systems.
REFERENCES
Aloisio, G.; Bochicchio, M. A.; La Scala, M.; Sbrizzai, R.,
1997, A distributed computing approach for real-time
transient stability analysis, IEEE Transactions on
Power Systems, Volume: 12, Issue: 2, pp. 981-987.
Berizzi, A., 2004, The Italian 2003 blackout, IEEE Power
Engineering Society General Meeting, Denver (CO),
USA, June 6-10.
Berizzi, A., Sforna, M., 2006, Dynamic security issues in
the Italian deregulated power system, IEEE Power
Engineering Society General Meeting, 18-22 June.
Bose, A., Bronzini, M., Bruno, S., De Benedictis, M., La
Scala, M., 2004a, Load Shedding Scheme for
Response-based Control of Transient Stability,
Proceedings of IREP Symposium 2004 - Bulk Power
System Dynamics and Control, Cortina D'Ampezzo,
Italy, August 22 – 27.
Bose, A., Bruno, S., De Benedictis, M., La Scala, M.,
2004b, A Dynamic Optimization Approach for Wide-
Area Control of Transient Phenomena, Proceedings of
CIGRÈ General Meeting, Paris, 29 August – 3
September.
Bose, A., 2010, Smart Transmission Grid Applications
and Their Supporting Infrastructure, IEEE
Transactions on Smart Grid, Vol. 1, No. 1, pp. 11-19.
Bruno, S., De Tuglie, E., La Scala, M., 2002, Transient
Security Dispatch for the Concurrent Optimization of
Plural Postulated Contingencies, IEEE - Transactions
on Power System, Vol. 17, No. 3, August, pp. 707-
714.
Bruno, S., De Benedictis, M., La Scala, M., Rotondo, G.,
2011, Balancing Protection Dependability And
Security In Large Transmission Grids, Cigré
International Symposium - The Electric Power System
of the Future. Integrating supergrids and microgrids,
Bologna, Italy, September 13-15.
Bruno, S., D’Aloia, M., De Carne, G., La Scala, M.,
Sbrizzai, R., 2012a, Controlling transient stability
through dynamic series compensation, IEEE
International Energy Conference & Exhibition
ENERGYCON 2012, September 9-12, Firenze.
Bruno, S., D’Aloia, M., De Carne, G., La Scala, M.,
2012b, Controlling Transient Stability through Line
Switching, IEEE PES Innovative Smart Grid
Response-basedControlthroughDynamicOptimizationinLarge-scalePowerSystems
215

Technologies Europe 2012, October 14-17, Berlin,
Germany.
Bruno, S., D’Aloia, M., La Scala, M., Sbrizzai, R., 2012c,
Protection system monitoring for the prevention of
cascading events in smart transmission grids,
Complexity in Engineering (COMPENG) 2012,
Aachen, Germany, June 11-13.
Cirio, D., Lucarella, D., Giannuzzi, G., Tuosto, F., 2011,
Wide area monitoring in the Italian power system:
architecture, functions and experiences, Euro. Trans.
Electr. Power, vol. 21, pp. 1541–1556.
Granelli, G.; Montagna, M.; La Scala, M.; Torelli, F.,
1993, Relaxation-Newton methods for transient
stability analysis on a vector/parallel computer, Power
Industry Computer Application Conference,
Conference Proceedings, pp. 387 - 393
Kundur, P., 1994, Power System Stability and Control,
McGraw Hill.
La Scala, M., Trovato, M., Antonelli, C., 1998, On-line
dynamic preventive control: an algorithm for transient
security dispatch, IEEE Trans. on Power Systems, vol.
13, No. 2, pp. 601-610.
La Scala, M., De Benedictis, M., Bruno, S., Grobovoy, A.,
Bondareva, N., Borodina, N., Denisova, D., Germond,
A. J., Cherkaoui, R., 2006, Development of
Applications in WAMS and WACS: an international
cooperation experience, IEEE PES General Meeting
2006, Montreal, Canada, June 18th-22th.
Momoh, J. A., 2009, Smart grid design for efficient and
flexible power networks operation and control, Power
Systems Conference and Exposition (PSCE), Seattle,
15-18 March.
Naduvathuparambil, B., Valenti, M. C., Feliachi, A., 2002,
Communication delays in wide area measurement
systems, Proceedings of the Thirty-Fourth
Southeastern Symposium on System Theory, pp. 118-
122, 18-19 March.
Phadke, A. G., Thorp, J. S., 2006, History and
Applications of Phasor Measurements, Proc. IEEE
Power Systems Conference and Exposition, Oct. 29 –
Nov. 1, pp. 331-335.
Taylor, C. W., 2000, The Future in On-Line Security
Assessment and Wide-Area Stability Control, IEEE
Power Engineering Society Winter Meeting 2000, vol.
1, pp. 78–83, January 23-27.
Taylor, C. W., Erickson, D. C., Martin, K. E., Wilson, R.
E., Venkatasubramanian, V., 2005, WACS-Wide-Area
Stability and Voltage Control System: R&D and
Online Demonstration, Proc. of IEEE, Vol. 93, n. 5,
pp. 892-906, May.
SIMULTECH2013-3rdInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
216
