
An Architecture of a Multi-Agent System for SCADA
Dealing With Uncertainty, Plans and Actions
Sarah Calderwood, Weiru Liu, Jun Hong and Michael Loughlin
School of Electronics, Electrical Engineering and Computer Science,
Queen’s University Belfast, Belfast, U.K.
Keywords:
Autonomous Agents, Multi-Agent Systems, Sensors, SCADA, Uncertainty, Plans, Actions, Fusion.
Abstract:
This paper presents a multi-agent system approach to address the difficulties encountered in traditional
SCADA systems deployed in critical environments such as electrical power generation, transmission and dis-
tribution. The approach models uncertainty and combines multiple sources of uncertain information to deliver
robust plan selection. We examine the approach in the context of a simplified power supply/demand scenario
using a residential grid connected solar system and consider the challenges of modelling and reasoning with
uncertain sensor information in this environment. We discuss examples of plans and actions required for
sensing, establish and discuss the effect of uncertainty on such systems and investigate different uncertainty
theories and how they can fuse uncertain information from multiple sources for effective decision making in
such a complex system.
1 INTRODUCTION
Uncertainty (Graham and Jones, 1988; Halpern,
2003) is pervasive in sensor network based systems
and control systems. Information may be incomplete
or approximated due to limitations in the equipment
used to collect data or introduced by the algorithms
that process the data. It is sometimes infeasible to
exactly describe an environment, a particular situa-
tion, a future outcome or the possibility of multiple
outcomes. Plans are derived from system goals and,
taking into account the current environmental con-
ditions, they define a series of actions that aim to
achieve those goals. For example a grid connected so-
lar powered house may need to take an action such as
demand additional electricity from the National Grid
based upon information received from other sensors
or based upon other specific plans for that particu-
lar situation. A sensor may have accuracy limitations
that might introduce doubt whether this action should
take place. Uncertain information may cause a catas-
trophic error if this uncertainty is not dealt with prop-
erly.
Robust uncertainty modelling theory is required to
represent, reason and adequately represent reliabili-
ties associated with the sources of uncertain informa-
tion. Examples of theories include Dempster-Shafer
theory of evidence (Shafer, 1976) and possibility the-
ory (Dubois and Prade, 2011).
In a multi-agent system, agents communicate, co-
operate, compete and co-ordinate accordingly with
the other agents in order to minimize the degree of
uncertainty that arises to accomplish their individual
and global goals. Since agents collect uncertain in-
formation from different sources, it becomes neces-
sary to fuse (or combine) uncertain information from
multiple sources in order to determine the most plau-
sible model of the environment. Therefore developing
suitable fusion algorithms within each chosen theory
is important. In this paper we will investigate these
issues and illustrate how these uncertainty modelling
and fusion approaches can be integrated into multi-
agent systems.
The rest of the paper is structured as follows.
Section 2 provides a background stating the basic
terms. Section 3 describes a simplified power sup-
ply/demand scenario. Section 4 defines goals, plans
and actions for normal operation of three agents. Sec-
tion 5 describes the sensing environment and factors
contributing to uncertainty. Section 6 models uncer-
tainty and how to fuse uncertain information using
theories. Section 7 summarises conclusions and fu-
ture work.
300
Calderwood S., Liu W., Hong J. and Loughlin M..
An Architecture of a Multi-Agent System for SCADA - Dealing With Uncertainty, Plans and Actions.
DOI: 10.5220/0004594603000306
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 300-306
ISBN: 978-989-8565-70-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2 MULTI-AGENT SYSTEMS
AND SCADA
Multi-Agent Systems (Jennings and Wooldridge,
1998; Wooldridge, 2002) are comprised of interact-
ing autonomous agents that are well suited for appli-
cations in a dynamic, unreliable situation. Such sys-
tems provide robust models for representing complex
and real world environments such as power systems.
Multi-agent systems gather information from sensors
and other agents through communication, and then
reason with dynamic environments to make rational
and timely decisions or actions.
Typical multi-agent systems adopt a centralised
architecture (Pipattanasomporn et al, 2009) but prob-
lems arise because of the need to integrate increas-
ingly diverse components and to scale to larger de-
ployments. In addition the complexity and unpre-
dictability of the environment present unique prob-
lems for centralised solutions.
Decentralised systems offer the necessary control
and level of integration to help components work to-
gether and provide a methodology that helps to dis-
tribute tasks (Jennings et al, 1995).
There are many advantages in using multi-agent
systems including increased fault and noise tolerance,
increased flexibility in design and scalability, en-
hanced security and increased efficiency. To demon-
strate and validate these advantages simulations will
be created using a simplified power supply/demand
scenario. This is beyond the scope of this paper.
SCADA (Supervisory Control and Data Acqui-
sition) is a proven and successful technology consist-
ing of a centralised system that monitors and controls
industrial processes, particularly in large scale critical
infrastructures such as power generation and power
transmission (Daneels and Salter, 1999; McArthur et
al, 2007; Arghira et al, 2011). SCADA systems are
attractive solutions in these application domains by
virtue of their flexibility, simplicity, reliability and
ability to work autonomously in real time. SCADA
does however have a number of restrictions due to the
centralised control architecture especially in the areas
of flexibility, scalability and resilience to failure or at-
tack (Yang et al, 2006).
Uncertainty in SCADA systems arises when sensor
data or inferred knowledge cannot be deemed accu-
rate. Applications must deal with inherent noise/error
in sensor data or knowledge as well as uncertainty,
incompleteness and inconsistent or conflicting data
from multiple sources (Sobh and Mahmood, 2002).
Humans have traditionally supervised such problems
to reason and resolve issues. In traditional SCADA
deployments the human supervisor takes the role
of encapsulating and handling inherent uncertainties
arising from incompleteness and inconsistencies. In-
telligent multi-agent systems need to perform this role
autonomously.
Domain knowledge captures environmentally
specific regulations, norms, restrictions, exceptions
and other domain-specific information. This knowl-
edge is used to generate plans of actions for a system
in a given state to achieve particular goals. Agents
need this knowledge to operate and reason with col-
lected sensory information for achieving their objec-
tives. Each agent may have its own specific knowl-
edge in addition to some common knowledge shared
amongst agents.
Domain knowledge is either elicited from domain
experts who are specialists in a chosen application
area or learned from domain specific datasets.
A common approach to capturing domain knowl-
edge is to use production rules that can readily be
represented and executed using Prolog. For example
a rule reacting to the reading of the voltage and fre-
quency of an overhead service line in a normal state
can be formatted as
If Voltage(Reading) ∈ (228V, 252V) ∧
Frequency(Reading) = 50Hz
Then Transmit(Electricity) ∧ Update(Meter)
Goal and action modelling helps to achieve au-
tomated intelligent control, reducing the need for hu-
man interaction and executing in real-time to suit var-
ious environmental conditions that may arise in the
system such as uncertainty, security issues or com-
ponent failure. From a description of possible states
of the world, the desired goals and a set of possible
actions, a plan can be determined that is guaranteed
from any of the initial states to generate a sequence of
actions that leads to one of the goal states.
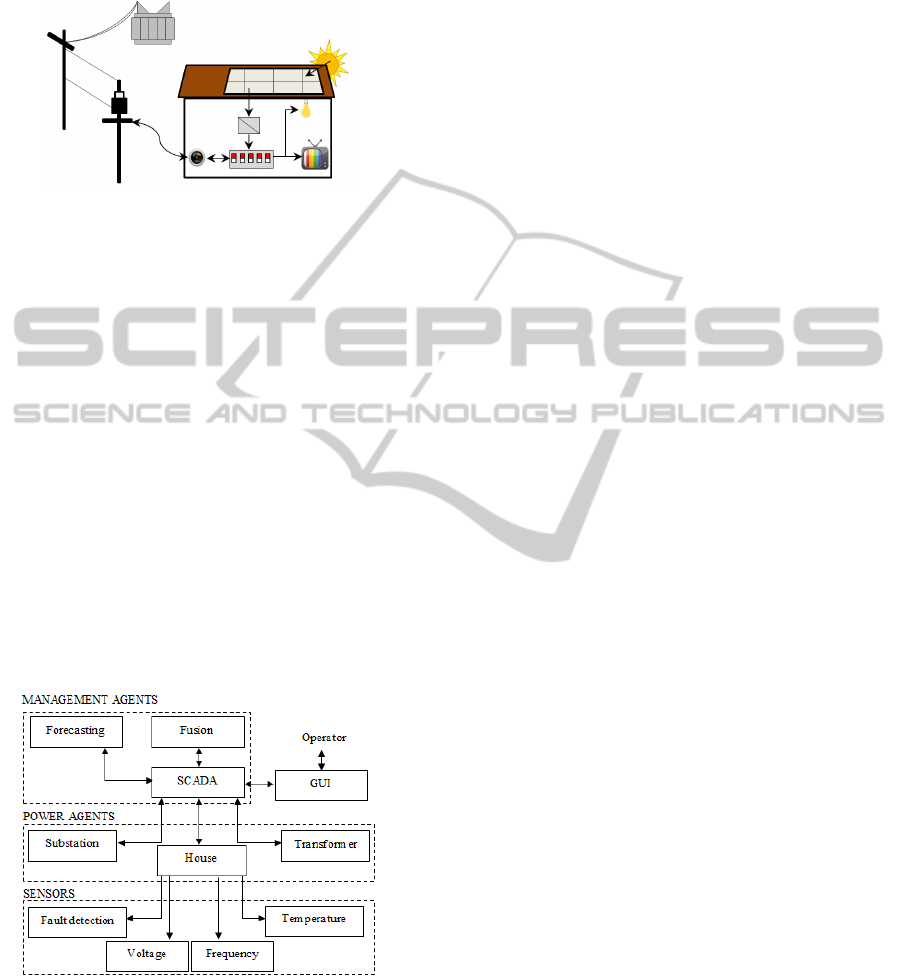
3 POWER SCENARIO
For the purpose of illustration, this paper will use in
its simplest form, a grid connected solar system for
successful power generation and supply (see Figure
1). This is part of a larger scenario for power gen-
eration, transmission and consumption. It consists of
three agents (a substation, a distribution transformer,
a house) and multiple sensors to measure voltage, fre-
quency etc. Other agents required will aid decision
making, record status and events, retrieve data from
equipment as shown in Figure 2. The approach can
be readily transferred to similar applications operat-
ing in other SCADA-related domains.
Power from Grid. We assume electricity has
been generated at a power station and transmitted over
AnArchitectureofaMulti-AgentSystemforSCADA-DealingWithUncertainty,PlansandActions
301
transmission lines to a substation located near to con-
sumers. The AC frequency of the power supply is 50
Hertz (Hz).
Figure 1: A simple grid connected solar system.
Substation transformers reduce high voltage electric-
ity to lower voltage electricity. Medium/low volt-
age distribution transformers convert the power from
main distribution lines to 240 volts (V) to serve resi-
dential loads. Electricity is delivered on low voltage
overhead service lines to a meter located inside the
building. A fuse box will trip to protect from prob-
lems such as short-circuits or appliance faults.
Solar Power. When the sun shines, solar pho-
tovoltaic panels generate direct current (DC). An
inverter converts DC into 240V alternating current
(AC) suitable for household appliances. A meter mea-
sures electricity production and consumption. Excess
electricity is fed into the National Grid where credit
is given by a utility company. If solar becomes un-
available then accumulated credits are used to offset
electricity drawn from the grid. Reverse power flow
causes problems such as voltage control, power qual-
ity issues, difficulty of isolation for maintenance etc.
Figure 2: A sample solution of the SCADA agents and sen-
sor architecture for simplified power scenario.
4 GOALS, PLANS AND ACTIONS
For the purpose of illustration we use, in its simplest
form, three agents for solar power generation and dis-
tribution (a substation, a distribution transformer, a
house) each equipped with the relevant sensors.
The goals, plans and actions are captured in the
AgentSpeak programming language (Rao, 1996; Bor-
dini et al, 2007). AgentSpeak is an agent-oriented
programming language based on logic programming
and the BDI architecture for autonomous agents.
Goals. The pro-active behaviour of agents is pos-
sible through the notions of goals. A goal is a de-
sired state of the world. Each agent will have indi-
vidual goals that they strive to independently achieve
depending on their state (for example normal, emer-
gency, failure, recovery).
For example the house agent has a goal to deliver
sufficient power to household appliances at an accept-
able voltage level and AC frequency. More specially,
to achieve this goal the house (fusebox, meter etc.)
must be switched on with the power supply operat-
ing at 50Hz and the voltage between 228V and 252V
(nominal voltage allows ±5%).
Similarly a goal to switch off a working trans-
former for maintenance requires informing the par-
ticipating components e.g. substation, consumers etc.
of the goal in order that they can react appropriately
to the overall system goals for this situation.
Plans. Each emerging situation (determined from
the information provided by sensing/observing agents
in the environment) must be complemented by a plan
of actions to follow to transform the initial situation
to one that satisfies some goal.
An AgentSpeak plan has the general structure of:
triggering event : context <- body
where the triggering event denotes the events that the
plan handles or a goal an agent needs to see achieved.
The context represents the circumstances in which the
plan can be used and the body is the course of action
to be used to handle the event if the context is believed
true at the time a plan is executed.
Substation Agent:
+!startSystem: true <- switchOnSystem;
runSystem.
+!runSystem: on(system) <- !startHouse;
!startTransformer.
Solar House Agent:
+!startHouse: on(system) <- solarHouseOn;
!runHouse.
+!runHouse: on(house) <- checkHouseSensors;
!runningHouse; !runHouse.
+!runningHouse: on(house) & frequency(50) &
(voltage(228) | voltage(252)) & on(fusebox) &
on(appliance) & meter(credit+1) <-
workSolarHouse.
+!runningHouse: on(house) <- switchOffHouse;
.send(system, untell, on(house));
.send(transformer, untell, on(house)).
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
302

Transformer Agent:
+!startTransformer: on(system) & on(house) <-
switchOnTransformer; !runTransformer.
+!runTransformer: on(transformer) <-
checkTransformerSensors; !runningTransformer;
!runTransformer.
+!runningTransformer : on(transformer) &
on(house) & (voltage(228) | voltage(252)) &
frequency(50) <- workTransformer.
+!runningTransformer: on(transformer) &
on(solarPower) <- switchOffTransformer;
.send(system, untell, on(transformer));
.send(house, untell, on(transformer)).
Actions. For the normal operation of the genera-
tion and distribution of solar power these typical ac-
tions may be executed for the above plans. These ac-
tions are specific to each agent and may rely on further
actions taken by other agents simultaneously.
switchOnSystem
Preconditions: ¬on(system)
Effects: on(system)
solarHouseOn
Preconditions: ¬on(house)
Effects: on(house)
workSolarHouse
Preconditions: on(house)
Effects: on(solarPower)
checkHouseSensors
Preconditions: on(house)
Effects: on(solarPower) & frequency(50) &
(voltage(228) | voltage(252)) &
on(fusebox) & on(appliance) & on(meter)
switchOnTransformer
Preconditions: ¬on(transformer)
Effects: on(transformer)
workTransformer
Preconditions: on(transformer)
Effects: on(gridPower)
checkTransformerSensors
Preconditions: on(house) & on(transformer)
Effects: on(gridPower) & frequency(50)
(voltage(228) | voltage(252))
These plans and actions can be further refined to
account for the real complexity in a working power
system.
5 SENSING ENVIRONMENT FOR
MULTI-AGENT SYSTEMS
In a real-world multi-agent system, the environment
plays a prominent role. Constantly sensing the envi-
ronment provides situational awareness and allows an
agent to adapt to environmental changes by selecting
or generating new plans as needed to ultimately en-
sure agents meet their own goals.
The environment can be considered to include all as-
pects of a system that are not owned or hosted within
an agent, including the infrastructure by which agents
communicate.
Certain environmental aspects may become un-
available to an agent but which are required for deci-
sion making about further actions. Informed guesses
may be required to progress. Uncertainty is an issue
that may arise and will have an impact on plan se-
lection. The following four aspects are factors that
contribute to uncertainty in a SCADA system such as
power distribution.
Supply and Demand Issues. Supply and demand
is a dynamic balance made more difficult because
there are no scalable methods of storing electricity. It
is difficult to predict and generate exactly the amount
of electricity required for consumer needs and to pro-
tect the grid from power overload and damage. Black-
outs occur if demand exceeds supply and brownouts
occur if power supply drops below demand. Main-
tenance of this balance is challenging. Output from
solar panels and other renewable sources are favoured
over fossil fuel based resources and generating power
stations may suspend generation temporarily until any
surplus electricity has been redistributed.
Future Popularity of Electricity and Con-
sumers Behaviour. It is predicted that electricity will
be increasingly relied upon to meet new demands for
electric heating, air conditioning and electric vehicles.
The unpredictable behavioural effects of consumers,
changes in their geographical distribution, the effect
of economic incentives etc. will also impact the po-
tential demand making it hard to estimate and plan
for future needs. For example if the price of electric-
ity becomes more expensive then consumers may be
more careful with usage.
Data Acquisition. Uncertainty arises from sens-
ing instrumentation or techniques used to make the
measurement. Moreover there is the possibility of hu-
mans, systematic errors or external deliberate intru-
sions compromising the reliability of data. For ex-
ample the measurement or updating of a voltage sen-
sor could be broken or a human may introduce an er-
ror when interpreting a sensor reading. The precision
and accuracy of the sensor could be significant to the
problem i.e. voltage is within a certain range and fre-
quency is an exact value.
Unpredictability of External Events. Uncer-
tainty arises if components required to distribute elec-
tricity are tampered. This can be accidental or mali-
cious. Projections of human behaviour are not eas-
ily amendable to prediction. Uncertainty may be
embedded into environmental factors that are out of
our control (e.g. humidity), weather conditions (e.g.
AnArchitectureofaMulti-AgentSystemforSCADA-DealingWithUncertainty,PlansandActions
303

wind, lightning), operational events (e.g. compo-
nent failure) and economic events (increased electric-
ity prices, costs to repair components) etc. Agents
need to predict future events based on many different
types of information and environmental factors. It can
be impossible to be certain that events will occur. Dif-
ferent sources will have different degrees of reliability
when agents make use of their information.
It is advantageous to handle properly uncertain
sensor information to enhance the performance of an
agent system. A multi-agent system that has adopted
measures to minimise uncertainty will reduce the
chances of failure/disaster occurring e.g. if new ev-
idence has been collected or observed and introduced
to the system an agent’s beliefs will need to be revised
or updated to take into account new information. It
will also result in better autonomous decision making
because robust uncertainty handling would limit the
need for human interaction and so allow for real-time
situational awareness.
6 UNCERTAINTY MODELLING
Many techniques have been developed for represent-
ing and processing uncertainty depending on the in-
formation given.
6.1 Dempster-Shafter Theory (DST)
This theory (Shafer, 1976) extends probability theory
and offers a mechanism to combine uncertain infor-
mation from distinct sources (represented by belief
functions) using Dempster’s combination rule. Mass
values are assigned to sets of possibilities rather than
singleton events. This model can cope with varying
degrees of precision.
Definition 1: A frame of Discernment
Set Ω={ω
1
,...ω
n
} is called a frame of discern-
ment(frame) if one and only one ω
j
is true at a time.
Example 1. data acquisition - assume there are
two voltage sensors on a distribution line and we want
to monitor the readings. For simplicity, assume the
reading
1
is either Normal(n) or Abnormal(¬n), then
Ω = {n, ¬n}.
Definition 2: Basic Belief Assignment (BBA)
Let m be a function on Ω as m: 2
Ω
→ [0,1] then m is
a BBA iff
∑
A m(A)=1. When m(∅)=0 is required, it
is called a mass function.
Example 2. Each sensor (S
1
) will contribute its
observations by assigning beliefs over Ω. The mass
1
It is possible to define a set of voltage values as the
elements of a frame.
function derived from sensor S
1
reading is denoted
by m,
m({n})=0.5, m({¬n})=0.3, m(Ω)=0.2
If m(∅)6=0, m is referred to as self-inconsistent,
which is equivalent to the open world assumption.
This means this is something we do not know there-
fore it is not modelled in Ω or the sensor information
is wrong.
Definition 3: Pignistic Transformation
In order to aid decision-making we use pignistic
transformation (Smets, 2004) which transforms a
BBA to a probability function.
Let m be a BBA on Ω. Its associated pignistic proba-
bility function BetP
m
: Ω→[0,1] is defined as:
BetP
m
(ω) =
∑
A⊆Ω,ω∈A
1
|A|
m(A)
1 − m(
/
0)
, m(
/
0) 6= 1
where |A| is the cardinality of subset A.
Example 3. Using Ex. 2,
BetP
m
(n) =
m({n})
|{n}|
+
m({Ω})
|Ω|
= 0.6
Similarly BetP
m
(¬n) = 0.4.
This means that it is highly likely voltage on the cable
is Normal, so no immediate actions are needed.
6.2 Possibility Theory
Dubois and Prades (2011) theory is suitable for mod-
elling an agents knowledge that is incomplete, there-
fore complementing probability theory.
Definition 4: Possibility Theory
Let Ω be a frame of discernment consisting of a set of
possible solutions.
A fundamental function in possibility theory is a
possibility distribution π : Ω → [0,1]. π is said to be
normal iff ∃ω
0
∈ Ω such that π(ω
0
) = 1. π(ω) means
the maximum likely possibility of ω being true.
Example 4. Using Ex. 2, π(n)=1, π(¬n) = 0.5
A possibility distribution is more like a quantita-
tive comparison of its alternatives. This is more suit-
able when evidence is less precise to define either a
probability function or a mass function. It has been
proved that any possibility distribution π can be con-
verted into a mass function.
6.3 Fusing Uncertain Information
In a complex system, certain information collected
from different or multiple sources such as data from
sensors or agents can be fused to derive more precise
beliefs and help achieve situation awareness. Percep-
tions can be built which allows the selection of appro-
priate plans. By retrieving agent goals a decision can
be made on the actions to execute.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
304

Different theories will deploy different combination
mechanisms. For example, Dempsters combination
rule for DS theory (Shafer, 1976), states that the rule
cannot be applied if pieces of information are almost
conflicting or coming from sources that may have in-
fluenced one another.
Defintion 5: Dempster’s Combination Rule
Given two mass functions m
1
and m
2
, their combined
mass function is:
m
1⊕2
(C)=m
1
⊕m
2
(C)=(1/1-k)
∑
A∩B=C6=∅
m
1
(A)
m
2
(B)
k =
∑
A∩B=∅
m
1
(A) m
2
(B) where k is the degree of
conflict.
For each proposition such as Normal(n), this the-
ory gives a rule of combining sensor S
1
and S
2
obser-
vation m
1
and m
2
respectively.
Table 1: This table shows the results of using the combina-
tion rule.
m
2
↓ m
1
→ {n},0.6 {n,¬n},0.4
{n},0.4 {n},0.24 {n},0.16
{n,¬n},0.6 {n},0.36 {n,¬n},0.24
Therefore m
1⊕2
({n})=0.76, m
1⊕2
({n,¬n})=0.24.
This reading indicates the voltage on the line is
normal.
For heterogeneous uncertain information, we can
merge mass functions (m) with possibility distribu-
tions (π), after π can be converted into another m’.
This then allows m and m’ to be combined using DS
values (Hunter and Liu, 2006).
As a result of uncertainty, agents have chances to
take different plans to achieve the same goal. They
need to evaluate which plan to take under such utility
through a selection function that is still to be devel-
oped.
7 CONCLUSIONS AND FUTURE
WORK
Uncertainty models are approximations because it is
infeasible to eliminate uncertainty entirely. It be-
comes necessary to model a problem domain, incor-
porating appropriate fusion algorithms, in such a way
that is suitable for the type of uncertainty evident in
the system to capture the true nature of the real world
domain.
Forthcoming research will involve the design and
implementation of a multi-agent SCADA system tak-
ing the power system as an example, dealing with un-
certainty, multi-source information, as well as their
effects on agent goals and plans. To recognise dif-
ferent environments, goals, plans and actions will be
incorporated using sensor data and domain knowl-
edge. A selection function will be developed to decide
which plan is most appropriate to achieve the goal
depending upon the prevailing circumstances. This
can help in future decision making and planning. The
AgentSpeak language has been used to model plans
and goals. Jason (Bordini et al, 2007) will be used
to develop a BDI agent architecture for the SCADA
power control. We plan to integrate our BDI architec-
ture with the Electronic Institutions framework (Ar-
cos et al, 2005) in order to model norms/regulations.
REFERENCES
Arcos, J. L., Esteva, M., Noriega, P., Rodrguez-Aguilar, J.
A. and Sierra, C. (2005). Engineering open environ-
ments with electronic institutions. In Engineering ap-
plications of artificial intelligence. 18(2), 191-204.
Arghira, N., Hossu, D., Fagaraan, I., Iliesc, S.S. and Cos-
tianu, D.R. (2011). Modern scada philosophy in
power system operation A survey. In UPB Scientific
Bulletin, Series C: Electrical Engineering. 73(2), pp.
153-166.
Bordini, R. H., Hubner, J. F., Wooldridge, M. (2007). Pro-
gramming Multi-Agent Systems in AgentSpeak using
Jason. John Wiley and Sons.
Daneels, C. and Salter, W. (1999). What is SCADA? In In-
ternational Conference on Accelerator and Large Ex-
perimental Physics Control Systems. Italy, 339-343.
Dubois, D. and Prade, H. (2011). On possibility theory,
formal concept analysis and granulation: Survey. In
Applied and Computational Mathematics. 10(1), pp.
10-19.
Graham, I. and Jones, P. (1988). Expert systems: knowl-
edge, uncertainty and decision. Chapman and Hall.
Halpern, J. (2003). Reasoning about uncertainty. The MIT
Press, Cambridge, Massachusetts, London, England.
Hunter, A. and Liu, W. (2006). Fusion rules for merging
uncertain information. In Information Fusion Journal.
7(1):97-134.
Jennings, N. R., Corera, J. M. and Laresgoiti, I. (1995). De-
veloping industrial multi-agent systems. In 1st Int.
Conf. on Multi-Agent Systems (ICMAS ’95). 423-430.
Jennings, N. and Wooldridge, M. (1998). Agent Tech-
nology: Foundations, Applications, and Markets.
Springer, Berlin.
McArthur, S. D. J., Davidson, E. M., Catterson, V.M.,
Dimeas, A. L., Hatziargyriou, N. D., Ponci, F.
and Funabashi, T. (2007). Multi-agent systems for
power engineering applications - Part I: Concepts, ap-
proaches, and technical challenges. In IEEE Transac-
tions on Power Systems. 22(4), pp. 1743-1752.
Pipattanasomporn, M., Feroze, H. and Rahman, S. (2009).
Multi-agent systems in a distributed smart grid: De-
sign and implementation. In IEEE/PES Power Sys-
tems Conference and Exposition. PSCE 2009.
AnArchitectureofaMulti-AgentSystemforSCADA-DealingWithUncertainty,PlansandActions
305

Rao, A. (1996). Agentspeak(l): BDI agents speak out in
a logical computable language. In Agents Breaking
Away. Springer.
Shafer, G. (1976). A Mathematical Theory of Evidence.
Theory of Evidence. Princeton University Press.
Smets, P. (2004). Decision making in the TBM: the neces-
sity of the pignistic transformation. In International
Journal of Approximate Reasoning. 133-147.
Sobh, T. and Mahmood, A. (2002). Recovering structure
uncertainties from noisy sense data. In Computers
and Electrical Engineering. IEEE/PES Power Systems
Conference and Exposition. 28(2), pp. 127-141.
Wooldridge, M. (2002). An Introduction to Multiagent Sys-
tems. Wiley, New York.
Yang, Z., Ma, C., Feng, J. Q., Wu, Q. H., Mann, S. and Fitch
J. (2006). A multi-agent framework for power system
automation. In International Journal of Innovations
in Energy Systems and Power. Vol. 1, no. 1.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
306
