
Model-based Analysis of Embedded Systems:
Placing It upon Its Feet Instead of on Its Head
An Outsider’s View
Peter Struss
Comp. Sci. Dept., Tech. Univ. of Munich, Boltzmannstr. 3, 85748 Garching, Germany
Keywords: Embedded Software, Cyber-physical Systems, Software Modeling, Failure-modes-and-effects Analysis,
Functional Safety.
Abstract: This position paper makes a case for a paradigm shift in modeling and analyzing systems with embedded
software for tasks such as testing, fault and safety analysis. We propose a physics-centered rather than
software-centered perspective, based on the argument that the behavior and misbehavior of the physical
system determines the relevant aspects of the embedded software. The implications of such an approach are
illustrated using a case study on failure-modes and effects analysis in the automotive industries.
1 INTRODUCTION
Nobody will doubt that embedded software is a
special class of software. It is characterized as being
a software component (or several ones) that is
integrated in a physical device or plant and
interacting with the physical components of this
overall system. In cyber-physical systems (CPS),
several systems with embedded software interact
physically and/or through communication, which
often results in a dynamic structure and context.
We argue that many tasks in model-based
development and analysis of systems with embedded
software, such as design verification, failure-modes-
and-effects analysis (FMEA), diagnosis, test
generation and testing, cannot be performed
effectively and successfully, unless its specificity,
namely being embedded in the physical system,
dictates the style and content of the model and the
analysis, rather than understanding systems
engineering of CPS just as extending software
engineering to physical systems. “Our modeling and
approach does not distinguish between software and
physical components” is not an advantage, but
indicates a major lack.
Our claim is not only that modeling of physical
systems cannot be done in the style of modeling
software. More than this: the behavior and
modeling of the physical system determines the
way of modeling the software and helps to
simplify and focus it.
In this paper, we motivate our position by
general considerations about CPS and illustrate the
resulting approach, which places the analysis upon
the feet (the physics) instead of on its head (the
software) using a case study in the automotive
industries on failure-modes-an-effects analysis and
functional safety analysis.
2 CYBER-PHYSICAL SYSTEMS
A CPS comprises a number of subsystems, which
are systems composed of physical (mechanical,
electrical, hydraulic, …) components and software
components, whose interaction happens exclusively
through a usually relatively small set of sensor
signals as an input to and actuator signals as an
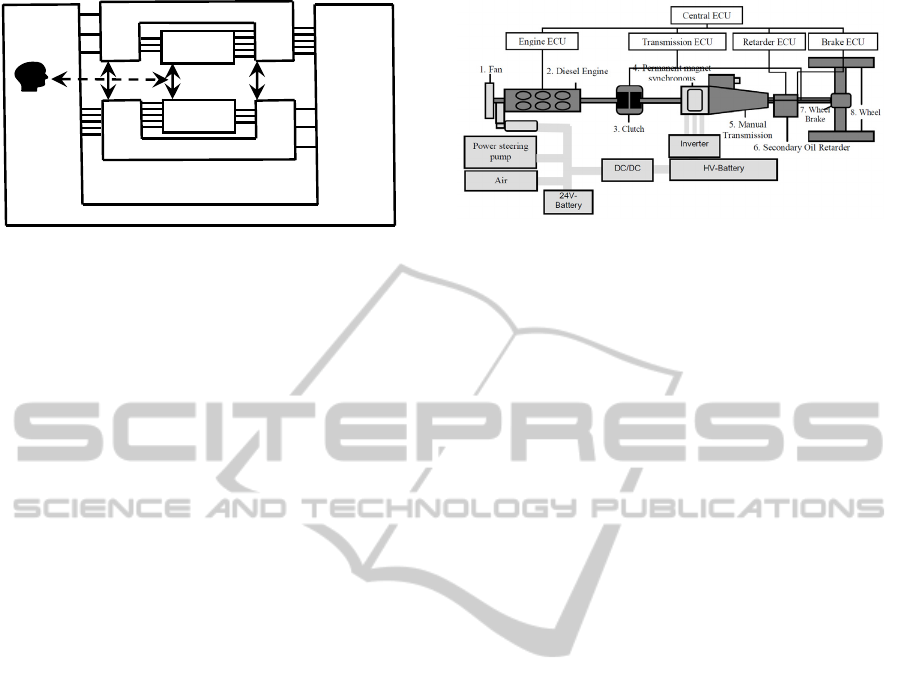
output of the software component(s) (see Fig. 1).
Different subsystems interact both via connections
between their physical components and via
communication between their software components.
For instance, in a vehicle, the components of the
drive train with their individual ECUs are examples
for such subsystems. At a higher level, the drive
train itself can be considered as a subsystem. The
top-level system is the entire vehicle.
The key issue here is that only the behavior of
the physical system matters. For instance, from the
perspective of safety analysis, it is important to note
284
Struss P..
Model-based Analysis of Embedded Systems: Placing It upon Its Feet Instead of on Its Head - An Outsider’s View.
DOI: 10.5220/0004596102840291
In Proceedings of the 8th International Joint Conference on Software Technologies (ICSOFT-EA-2013), pages 284-291
ISBN: 978-989-8565-68-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
SW_x
Physical System_x
SW_y
Physical System_y
Environment
Data
Information
Physical
Interaction
Physical
Interaction
Physical
Interaction
?
Figure 1: Cyber-physical Systems.
that it is solely the physical system, i.e. the vehicle
(or its physical parts) that interacts with the
environment. The embedded software never
directly interferes with the environment. As a
consequence, hazards, misbehaviors that bear the
potential of damage in the environment, are defined
exclusively at the intersection of the physical
system and the (physical) environment. Whatever
crazy operations may be carried out by the software
– they are never a hazard per se. They may only
cause one via the response of the physical system to
the actuator signals. So far, no computer program
has ever hit a pedestrian.
As an important consequence, buggy software
behavior matters if and only if it may cause the
physical system to create a hazard. Therefore, our
approach moves the (model of the) physical system
into the center and models software – and
especially software faults – solely with regard to the
physical model. As a consequence, the relevant
misbehavior of the physical system helps to simplify
and focus the modeling and analysis of the
embedded software:
While the inputs to the software (combinations of
sensor values) form an infinite space from the
frog’s perspective of the software, the surrounding
physical system and its context reduce this to the
physically possible subspace (one has to note,
however, that this does not only include the
nominal, but also faulty behavior).
Furthermore, what is considered a relevant
misbehavior or hazard of the entire system
determines a focus and weight on the analysis of
the software components.
We illustrate the principle of the primacy of the
physical model using a recently performed case
study, which included Failure-modes-and-effects
(FMEA) and safety analysis of the drive train of a
truck. The drive train comprises, besides
mechanical, hydraulic, and electrical components, a
number of Electronic Control Units (ECU) and, thus,
is certainly an instance of the class of systems we
Figure 2: Drive Train Model.
are considering in this paper. The goal of our work
was the complete automation of the analysis based
on a model of the system and its environment. This
goal was accomplished as described in (Dobi et al.,
2013).
We briefly sketch the system and the task in the
following section, present the theoretical
foundations of our solution (section 4) and of
automated FMEA (section 5), and illustrate in
section 6 the central thesis of this paper: the
dominance of the behavior and model of the
physical system over the software behavior and
model. Section 7 extends this to the aspect of
generating (safety) requirements on the embedded
software.
3 A CASE STUDY: SAFETY
ANALYSIS OF A DRIVE TRAIN
Our industrial partner, ITK Engineering AG,
selected a drive train of a truck as the subject of a
case study. Its structure is sketched in Fig. 2. The
main part (in dark gray) comprises the engine, which
produces torque for acceleration, but also for
braking, the clutch, which may interrupt the
propagation of torque, the transmission allowing to
switch between forward and reverse torque (and
idling), the retarder, a braking device that, when
applied, counteracts the rotational motion through a
propeller moving in oil, and the axle with the wheel,
which transforms rotational acceleration into
translational acceleration (and vice versa), and the
wheel brakes. Components are controlled by
specialized ECUs, which communicate with a
central ECU that processes, for instance, the driver
demands. The light-gray components are related to
electrical aspects and are not discussed in this paper.
The industrial partner also supplied us with
documents on exemplary problems and manually
generated safety analysis tables. The core of an entry
in such a table links a component fault (e.g.
Model-basedAnalysisofEmbeddedSystems:PlacingItuponItsFeetInsteadofonItsHead-AnOutsider'sView
285

“erroneous CLOSE command to the clutch”), a
special driving situation (“engine running, vehicle
standing”), and a type of scenario (“vehicle in front
of pedestrian crossing”) with a hazard (“unintended
forward acceleration”) and its impact on the
environment (“injury of persons”). Relevant impacts
are typically hit-ting objects or persons, where,
obviously, the severity is influenced by the type of
object.
4 MODELING FOUNDATIONS
4.1 Physical vs. Software Modeling
At a very high level, the model of a cyber-physical
system may not explicitly distinguish whether its
subsystems of components are software modules or
physical components, and they may be represented
in a uniform way, e.g. as black boxes with some
mapping from inputs to outputs or as transition
systems. Often, these models try to capture the
(intended) function of a system, rather than its entire
possible behavior. For instance, in early phases of
design, it may not yet have been decided whether a
certain subsystem will be realized by software, a
physical system, or a combination of both.
However, when the behavior has to be analyzed
in detail, the different nature of software and
physical components will often require models that
appropriately capture the physical phenomena that
determine system behavior. This is even mandatory
when the consideration of faulty behavior is
involved, as e.g. in diagnosis, testing, or safety
analysis: While the space of bugs in the software
components is created by erroneous (manual or
automated) transformations on the path from
requirements to code (and also inappropriate
requirements), faults of physical components are
exclusively subject to the physical defects, which
often makes it possible to enumerate and model the
relevant fault classes. Moreover, most physical
components, e.g. in electrical, mechanical,
hydraulic, and pneumatic circuits cannot be
modeled by input-output behavior. Even if they
have an intended preferred direction under nominal
system behavior, this may be totally perturbed under
the presence of a fault. Therefore, our approach
presented is based on relational models of the
physical components, which also induces a small set
of generic high-level (fault) models of the software
components.
The characteristics of the models used in our
solution are the following:
Compositional modeling: models of systems are
obtained through aggregation of models of its
parts, possibly across several layers of hierarchy.
Component-oriented modeling: the parts are
components, i.e. the building blocks that are
assembled to form the system and determine its
behavior (both physical and software components).
This is due to two reasons. Firstly, component
models can be reused in different system models
just as the components are reused in different
systems. Secondly, components are the entities
that are subject to faults, whose impact needs to be
determined in safety analysis.
Qualitative behavior models reflect the qualitative
and worst-case nature of the analysis.
Relational models (as opposed to transition
systems) are chosen to represent these qualitative
behavior descriptions, according to the
considerations above and justified by the
observation that hazards are commonly the result
of a fault in one state of the physical system (rather
than occurring after a sequence of state
transitions).
Deviation models are used, since faults, hazards,
and impact are characterized as (qualitatively)
distinct from nominal behavior.
In the following, we specify these characteristics
more formally, though in a nutshell (For
introductory material, see e.g. (Struss, 1997),
(Struss, 2008).
4.2 Component-Oriented Modeling
A component type (used to create different
instances) is represented under a structural and a
behavioral perspective:
It has a number of typed terminals, which can be
shared with other components.
Thus, a system structure is described by as
(COMPS, CONNECTIONS), where COMPS is a set
of (typed) components and CONNECTIONS is a set
of pairs of terminals of equal type belonging to
different components.
A component C
i
has a vector v
i
= (v
ik
) of variables,
comprising parameters and state variables,
which are considered as internal and constant and
changing dynamically, resp., and terminal
variables. The latter are obtained from the
instances of the terminal types, which have a set of
associated variable types.
The CONNECTIONS of a system structure induce a
set VARIABLECONNECTIONS of pairs of
corresponding terminal variables from connected
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
286

components. Each variable connection introduces a
mapping between the values of the connected
variables: this is usually equality (for signals,
voltage etc.), while for directed variables, such as
torque and current, the sign is flipped.
A component C
i
has a set of behavior modes
{mode
i
(C
j
)}, where one mode, OK, corresponds to
the nominal behavior of the component and the
other ones denote different defects of the
component.
4.3 Qualitative Modeling
Qualitative models describe component behavior in
terms of variable domains DOM (v
ik
) that are finite.
Besides domains that are considered “naturally”
discrete, such as Boolean for binary signals and
{OPEN, CLOSED} for the state of a clutch, the
domains of continuous variables are obtained by
discretization and are usually finite set of intervals
that reflect the essential distinctions needed for
capturing the relevant aspects of component
behavior:
DOM (v
ik
) = {I
ikm
m=1, 2, …, n}
4.4 Relational Modeling
The behavior of a component under a particular
behavior mode, mode
i
(C
j
), is represented as the set
of qualitative tuples that are possible if this mode is
present, i.e. as a relation
R
ij
DOM(v
i
) =
DOM (v
i1
) DOM (v
i2
) ... DOM (v
ir
) ,
or, in AI terminology, as a constraint (which means
many operations on models introduced in the
following can be realized using techniques of Finite
Constraint Satisfaction).
Each variable connection (v
p
, v
q
) introduces a
relation R
pq
capturing the mapping between
domains.
4.5 Compositional Modeling
A model of an aggregate system is not unique, but
dependent on the behavior modes of the
components. A mode assignment MA = {mode
i
(C
j
)}
specifies a unique behavior mode for each
component, and a model of the system is obtained as
the (natural) join (as in the relational algebra and
SQL, see (Codd, 1970)) of the mode models:
R
MA
= R
pq
R
i
j
.
(1)
4.6 Deviation Models
Some are stated in absolute terms ("zero braking
torque exerted by brake") others are only described
in relative terms ("reduced braking torque produced
by a worn brake"), and so are definitions of hazards:
"reduced deceleration of vehicle". Such models are
meant to capture qualitative deviations from the
nominal behavior, which is the basis for detecting
deviations in the behavior of the entire system.
We use deviation models in the same way as in
(Struss, 2004): the qualitative deviation of a variable
v is defined as
x:= sign(x
act
x
nom
)
(2)
which captures whether an actual (observed,
assumed, or inferred) value is greater, less or equal
to the nominal value. The latter is the value to be
expected under nominal behavior, technically: the
value implied by the model in which all components
are in OK mode.
Qualitative deviation models can be obtained
from standard models stated in terms of (differential)
equations by canonical transformations, such as
a + b = c a
⊕
b = c
a * b = c
a
act
⊗
b)
⊕
(b
act
⊗
a)
⊝
(a
⊗
b) = c,
with the addition, multiplication, and subtraction
operators of interval arithmetic:
⊕
,
⊗
,
⊝
.
5 AUTOMATED FMEA
For both the analysis of hazards (unwanted behavir
of a vehicle) and the overall impact analysis, we
exploit an algorithm that has been used for FMEA
(Picardi et al., 2004), (Struss and Fraracci, 2012).
The algorithm is based on representing not only
behavior models as finite relations (as described in
4.4), but also effects and scenarios. Effects can
naturally be stated as relations E
j
on system
variables that characterize the relevant aspects of
system behavior, such as (the deviation of) the
acceleration of a vehicle, while a scenario is
typically a relation S
k
on exogenous variables and
internal states of the system like the position of the
brake pedal (pushed or not) and the vehicle speed.
The algorithm checks the presence of effects for
Model-basedAnalysisofEmbeddedSystems:PlacingItuponItsFeetInsteadofonItsHead-AnOutsider'sView
287

each possible single fault in the system under each
defined scenario. Using the relational representation,
this means that for a mode assignment MA
i
that
contains exactly one fault mode and OK modes
otherwise, the respective behavior model R
MAi
is
automatically composed according to (1). Then, for
each scenario S
k
and each effect E
j
, it is determined
whether
j
(R
MAi
⋈
S
k
) E
j
,
where
j
denotes the projection (as used in the
relational algebra) to the variables of E
j
. The
positive case, i.e. the failure mode is included in
effect, means that the effect will definitely occur.
Stated in logic, this means that the fault entails the
effect in this scenario.
j
(R
MAi
⋈
S
k
) E
j
= .
If the intersection is empty, the effect does not
occur. Logically, the effect is inconsistent with the
fault mode and the scenario.
Otherwise, the effect possibly occurs, i.e.
j
(R
MAi
⋈
S
k
) covers both conditions under which the
effect is present and others under which it does not
occur – the effect is consistent with the fault mode
and the scenario.
In our project, we used the FMEA engine of Raz’r
(OCC’M, 2013), which implements this approach to
autmatically generate effects at different levels:
at the system level, i.e. the entire vehicle, in terms
of unwanted accelration and deceleration of the
truck
in the interation with the enviroinment, in terms of
collisions with persons and other vehicles and
objects.
6 DRIVE TRAIN MODELS
The components of the drive train determine the
acceleration or deceleration of the vehicle. More
precisely, engine, crank shaft, clutch, gear box,
retarder, and wheel brakes together determine the
torque on the axle, and the wheel in interaction with
the road surface transforms the torque into a
translational acceleration of the entire vehicle – or
not, if the friction between road surface and tire is
low. Things get even more complicated, when the
road has a non-zero slope and gravity adds a force
that accelerates (or decelerates) the vehicle – again,
dependent on friction: with sufficient friction, the
gravity component along the road will add another
torque to the axle (which may be overcome by other
torques), otherwise, it will directly contribute to the
translational acceleration of the vehicle (sliding
downhill).
These considerations indicate that the modeling
task is non-trivial. The issues to be addressed are
The overall (deviation of the) torque applied
cannot be determined locally, but only as the
combined impact of several components.
The transformation of torque into an accelerating
force and vice versa
The modeling of software components and,
especially, software faults, which seems to be in
the complexity class of clearing out the Augean
stables.
We discuss these aspects in the following.
6.1 Physical Components
We use deviation models as outlined in section 4.6.
Faults may introduce non-zero deviations, e.g. the
model of a worn brake would result in a deviating
braking torque, which depends on the direction of
the rotation (static friction)
T
brake
=
or the applied torque in case of kinetic friction
T
brake
= T
wheel
Models of OK and faulty behavior are stated in
terms of constraints on the deviations. For instance,
a closed clutch simply propagates a deviating torque
coming on the left from the engine to the right
(flipping the sign):
T
right
= -
left
.
Here, and throughout the paper, most variables have
values from the domain Sign = {-, 0, +}: torques and
forces, T and F, rotational and translational speeds,
and v. The commands and states explicitly
discussed here have Boolean values {0, 1}.
Space limitations do not permit presenting the
entire model library (see Dobi et al., 2013) for
details). In the following, we try to outline the key
ideas and illustrate them by selected component
models.
The core purpose of the drive train component
models is to determine the (deviation of the) torque
acting on the axle, which determines the (deviation
of the) translational acceleration of the vehicle (if
the road surface permits). As stated above, the
overall torque results from the interaction of all
components, which potentially contribute to it. The
engine can produce a driving torque, the braking
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
288
elements (wheel brake, retarder, engine) may
generate a torque opposite to the rotation, and the
clutch and transmission may interrupt or reverse the
propagated torque.
Our current model is based on assuming that
there are no cyclic structures among the
mechanically connected components, which is the
case in our application, but certainly also in a much
broader class of systems. The component models
link the torque (deviations) on the right-hand side to
the one on the left-hand side, possibly adding a
torque (deviation) generated by the respective
component. Hence, at each location in the drive-train
model, the (deviations of) torques represent the sum
of all torques collected left of it.
Whenever a terminal component (in our case the
wheel) or a component in a terminal, i.e. open, state
(the clutch and the transmission) is reached, the
arriving torque is the total one for the section left,
and for the open components, the torque on the
right-hand side is zero, as exemplified by the clutch
(state=0 means open):
state=1 T
right
=
left
state=0 T
total
=
left
T
right
= 0.
Determining the deviation models is not as
straightforward, as it may appear, as we will explain
using the model of retarder as an example. If
engaged (state=1), it will generate a torque opposite
to the rotation (zero, if there is no rotation) and add
it to the left-hand one. The base model is obvious:
T
right
=
left
T
brake
state = 1 T
brake
= -
state = 0 T
brake
= 0 ,
where denoted addition of signs. The first line
directly translates into a constraint on the deviations:
T
right
=
left
T
brake
However, determining T
brake
requires consideration
of how the actual state is related to the nominal one,
which depends on the control command to the
component, and, to complicate matters, not on the
actual command, but the command that
corresponds to the nominal situation. This means
we have to model possibly deviating commands, and
we apply the concept and even the definition of a
deviation also to Boolean variables. For instance, in
the retarder model, state = - means state = 0 (i.e. it
is not engaged) although it should be 1, and state =
+ expresses that it is erroneously engaged. Such
deviations could be caused by retarder faults, e.g.
stuck-engaged. However, in the context of our
analysis, we must consider the possibility that the
commands to the retarder are not the nominal ones
(caused by a software fault or the response of the
correct software to a deviating sensor value). Under
multiple faults, a component fault may even mask
the effect of a wrong command (the retarder stuck
engaged compensates for cmd = -). In the OK
model of the retarder, it does what the command
requests and the deviations of the command and
state (i.e. the real, physical state) are identical:
state = cmd .
For a stuck engaged fault, however, Table 1 captures
the constraint on the deviations:
Table 1. Retarder stuck engaged - Deviation constraint.
cmd
cmd state
1 0 0
0 0 +
0 - 0
1 + +
Here, the third row represents the masking case
mentioned above, while the first one reflects that the
physical state coincides with the command, while in
the second one, it does not.
From state, T
brake
is determined by
T
brake
= - state,
where denotes multiplication of signs. This
completes the model of the retarder.
6.2 Software Models
Since the drive train contains a number of ECUs, we
also need to include models of software and its
faults in our library. Remember: all that matters
about software faults is their impact on the physical
system, more precisely, on the controlled actuator.
Deviations in an actuator signal will often cause a
deviating behavior of the respective actuator. If there
is no command to the brakes although the braking
pedal is pushed, then the brakes do not perform as
expected under nominal behavior (and potentially
cause a collision). And if a continuous signal like the
one controlling the amount of injected fuel is too
low, this may result in a reduced acceleration of the
vehicle.
Such deviations in actuator signal can have two
reasons:
The software works correctly but based on a
deviating input from sensors or other ECUs (e.g. a
wrong measurement of the outside temperature
may lead to an inadequate computation of the
amount of fuel to be injected.
The software is buggy and therefore produces a
wrong output (e.g. due to a wrong computation of
Model-basedAnalysisofEmbeddedSystems:PlacingItuponItsFeetInsteadofonItsHead-AnOutsider'sView
289

the fuel amount).
This means: the OK model of software functions
needs to capture how deviating input from sensors or
input other ECUs influences potential deviations in
the actuator signals.
For instance, assume that the command to
engage the retarder as an additional braking element
is based on the rotational speed exceeding a
threshold. In our context, the only interesting aspect
is how the (correct) function propagates a deviation
of a sensor value (or a missing one). Slightly
simplified, this can be stated as
cmd = _s ,
where _s is the sensor signal and cmd is defined
w.r.t. the domain {0, 1} of cmd. If the _s is too low
(high), i.e. deviates negatively (positively) and,
hence, reaches the threshold too early (too late), this
causes the command to be sent too early (too late),
i.e. the command deviates positively (negatively):
Untimely (or early) command: cmd = +
Missing (or late) command: cmd = -
These are also the definitions of the only relevant
faults of the software function, regardless of how
they are produced in detail. For instance, the
threshold being too high (low) has the same impact
as the sensor signal being too low (high). However,
for Software FMEA and safety analysis, the detailed
nature of the fault does not matter.
The same applies to continuous actuator signals,
such as the fuel injection, where the faults represent
signal too low and too high, respectively.
This provides evidence for our claim that putting
safety analysis back on its feet and the physical
model in the center, greatly simplifies the modeling
and analysis of the embedded software. In particular,
for the purpose of hazard analysis, we obtain a small
set of reusable software models for our library. Of
course, if we do have a more detailed model of the
software, also the fault models can be more specific.
6.3 Results
The automated FMEA generates models of the entire
system with one fault injected at a time and checks
for the effects on the vehicle (“hazards” like
“reduced deceleration”) or on the environment
(collisions). Based on the modeling principles
outlined above, this includes sensor and software
faults. Figure 3 shows an example of the results,
which are presented in (Dobi et al., 2013).
Figure 3: Hazard analysis for “vehicle start”.
7 DERIVING (SAFETY)
REQUIREMENTS
In the work presented above, the models were used
for determining hazards and their impact on the
environment, i.e. for analysis only. However, the
model also forms the basis for the derivation of
safety requirements and, hence, can contribute to re-
design for safety. We illustrate this potential in an
abstract way: First, in the analysis step, a particular
physical scenario, S
P
, (say, heavy braking on a
slope) is mapped to the input channel of the software
by the physical model, M
P
, as a set of sensor signals,
or, rather ranges of sensor signals, (pressure, wheel
speeds, etc.),
I
S
=
I
(M
P
⋈
S
P
) ,
where
I
denotes the projection to the input channel
of the embedded software.
The software model M
S
needs to determine the
respective output in terms of actuator signals (e.g. to
the valves controlling the braking)
O
S
=
O
(M
S
⋈
I
S
),
where
O
is the projection to the output channel.
Based on the scenario S
P
and O
S
, which is the input
to the physical system, again the physical model M
P
determines the behavior of the physical system with
respect to its environment:
B
E
=
E
(S
P
⋈
M
P
⋈
O
S
),
where
E
is the projection to the interface of the
physical system to the environment (e.g. too high
deceleration), which may then, through a context
ICSOFT2013-8thInternationalJointConferenceonSoftwareTechnologies
290

model M
C
lead to a relevant impact on the
environment.
On this basis, safety requirements for the
embedded software may be determined by back-
propagating a safety requirement on the behavior of
the physical system to the software: avoiding the
impact by avoiding the hazard B
E
establishes a
revised system response B’
E
, (e.g. the negation of
B
E
). M
P
infers a required modified software output
in scenario S
P
O’
S
=
O
(B’
E
⋈
M
P
⋈
S
P
),
i.e. the requirement on the modified software model
M’
S
M’
S
⋈
I
S
=
O
(B’
E
⋈
M
P
⋈
S
P
),
or stated in a functional view:
M’
S
:
I
(M
P
⋈
S
P
)
O
(B’
E
⋈
M
P
⋈
S
P
).
Again, this illustrates the primacy of the physical
perspective, because both the scenario and the
behavior requirement are formulated at the level of
the physical interaction, and the model of the
physical system determines the requirements on the
software.
8 SUMMARY
The case study and its results support our claim that
modeling and model-based analysis of embedded
software is both greatly improved and simplified by
a modeling perspective that focuses on the model of
the physical system.
We successfully applied this approach also in
another case study to automated FMEA of a braking
system (Struss and Fraracci, 2012).
The modeling applied in these case studies
avoids some of the most frequent pitfalls or
inadequacies in modeling physical components in
software and systems engineering, namely
modeling function instead of behavior, which is
strongly related to
modeling them in a context-dependent, rather than
generic manner,
modeling components with input-output behavior,
which is related to
modeling them using finite state machines instead
of (abstractions of) (differential equations).
The results obtained have triggered interest in
pursuing this line of research. We are currently
preparing a collaborative project involving
automotive companies and academic partners
(representing model-based approaches from AI and
software engineering) that aim at providing tools for
functional safety that are compliant with the
standards and processes. This will require
embedding the analytic part covered here with
higher-level models from design and also feeding
back its results to the process of responding to
severe shortcomings by developing appropriate
safety functions. Steps towards formal foundations
for an integration of the model-based systems and
software engineering technologies will be required
for this.
ACKNOWLEDGEMENTS
I would like to thank our partners from ITK for
providing their domain knowledge and their patience
and Sonila Dobi and Alessandro Fraracci for their
support. Special thanks to Oskar from OCC’M
software for producing a very efficient
implementation of the FMEA algorithm.
REFERENCES
Codd, E. F., 1970. A Relational Model of Data for Large
Shared Data Banks", in Communications of the ACM
Dobi, S., Fraracci, A., Gleirscher, M., Spichkova, M.,
Struss, P., 2013. Model-based Hazard and Impact
Analysis, Tech. Report, TU Munich, Comp. Sci. Dept.
OCC'M Software GmbH, 2011. Raz'r Model Editor
Version 3. Interactive Development Environment for
Model-based Systems. http://www.occm.de/
Picardi, C., Console, L., Berger, F., Breeman, J., Kanakis,
T., Moelands, J., Collas, S., Arbaretier, E., De
Domenico, N., Girardelli, E., Dressler, O., Struss, P.,
Zilbermann, B., 2004. AUTAS: a tool for supporting
FMECA generation in aeronautic systems. In:
Proceedings ECAI-2004 Valencia, Spain, pp. 750-754
Struss,P., 2004. Models of Behavior Deviations in Model-
based Systems. In. Proceeding of ECAI-2004
Valencia, Spain, pp. 883-887.
Struss, P., 1997. Model-based and qualitative reasoning:
An introduction. In: Annals of Mathematics and
Artificial Intelligence 19 (1997) III-IV, Elsevier, pp.
355 - 381, 1997.
Struss, P., 2008. Model-based Problem Solving In: van
Harmelen, F., Lifschitz, V., and Porter, B. (eds.).
Handbook of Knowledge Representation, Elsevier, pp.
395-465
Struss, P., Fraracci, A., 2012. Modeling Hydraulic and
Software Components for Automated FMEA of a
Braking System. In: Dearden, R. and Snooke, N.
(eds.). Proceedings of the 23rd Workshop on the
Principles of Diagnosis. Great Malvern, UK.
Model-basedAnalysisofEmbeddedSystems:PlacingItuponItsFeetInsteadofonItsHead-AnOutsider'sView
291
