
Exploratory Modeling of Complex Information Processing Systems
Jochen Kerdels and Gabriele Peters
Chair of Human-Computer Interaction, University of Hagen, Universit¨atsstrasse 1, D-58097 Hagen, Germany
Keywords:
Exploratory Modeling, Modeling of Complex Systems, Emergence, Self Organization.
Abstract:
A widely adopted approach to study and understand complex systems such as ant colonies or economic sys-
tems consists in their modeling and simulation. In contrast to the predominat use of models and simulation
in science as a substitute for the real system in order to predict the system’s beaviour, the methodology of
exploratory modeling uses modeling and simulation as a tool to increase knowledge and understanding of the
systems themselves, for example to better understand the dynamic properties of a system. In this paper we
propose a model which was specifically devised to support this process of exploratory modeling. The model
defines four lightweight building blocks such as information processing entities that can be freely combined
to model a particular complex system. Furthermore, the model provides an explicit state representation that
comprises the entire model including an explicit representation of the information that is individually available
to every information processing entity of the model. We illustrate our introduction of the proposed model by
means of short examples of a concrete system for the simulation of motions in a flock of birds.
1 INTRODUCTION
A widely adopted approach to study and understand
complex systems consists in their modeling and sim-
ulation. Typical examples of systems that are being
investigated in that way include ant colonies, eco-
nomic systems, nervous systems or biological evo-
lution (Newman, 2011). Yet, much simpler systems
based on only a small set of fixed rules like board
games or cellular automata are also analyzed in this
context (Evans, 2001; Holland, 1998; Gardner, 1970).
In contrast to the predominat use of models and
simulation as a means to make valid predictions about
the system that is being modeled, the analysis of the
systems themselves typically uses the methodology
of exploratory modeling (Bankes, 1993). Exploratory
modeling is an iterative process which uses modeling
and simulation as a means to test assumptions, to un-
cover unexpected implications of existing knowledge
and to act as a form of intuition pump (Dennett, 1998).
At the center of this approach lies the concept,
that a system is not represented by a single specific
model but rather by a model space which is con-
strained by what is known aboutthe system and which
is expanded by what is uncertain. This model space
is then explored by conducting series of simulations
with varying model instances drawn from the space
of possible models. These computational experiments
can support the analysis of complex systems in differ-
ent ways. For example:
• Exploration of Parameters The influence of model
parameters on the dynamic behaviour of a com-
plex system can be estimated by identifying the
parameter ranges that are essential for a stable op-
eration of the system or, conversely, by identify-
ing those parameter ranges under which the sys-
tem breaks down.
• Identification of common Patterns. Simulation of
a wide range of complex systems facilitates the
identification of common patterns that underlie
phenomena of self-organization and emergence.
These common patterns are the prerequisite for
a more general understanding of the dynamic be-
haviour of complex systems (Holland, 1998).
• Existence Proofs. Modeling of hypothetical, high
level mechanisms or structures that are based on
known basic mechanisms of a system can provide
proof of concept explanations for observed phe-
nomena that are associated with that system.
The methodology of exploratory modeling is not
bound to a specific form of modeling or simulation.
The types of models used range from simple sets of
mathematical equations (Lempert et al., 1996) to cel-
lular automata (Langton, 1986) or agent-based mod-
514
Kerdels J. and Peters G..
Exploratory Modeling of Complex Information Processing Systems.
DOI: 10.5220/0004598205140521
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 514-521
ISBN: 978-989-8565-70-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

els
1
(DeAngelis and Mooij, 2005). The choice of a
particular model type is commonly guided by the sim-
ilarity between characteristics of the system and the
model. For example, agent-based models are widely
used in social sciences (Salamon, 2011) and eco-
nomics (Bonabeau, 2002) as the concept of an agent
readily translates into entities of the respective sys-
tems like market participants, employers or friends.
This direct mapping of system entities onto model
entities facilitates an intuitive way of describing a sys-
tem. However, this intuitive approach also empha-
sizes two detrimental tendencies in the resulting mod-
els:
• There is a tendency to focus on modeling the en-
tities of a system rather than a focus on modeling
the interactions occuring in that system.
• There is a tendency to incorporate only a small
number of temporal and spatial scales which
leads to either oversimplified entities or to entities
which are complex systems by themselves. Some
model types, for example the swarm model (Mi-
nar et al., 1996), mitigate this tendency by allow-
ing nested structures.
Especially in the case of complexsystems that employ
a substantial variety of signaling mechanisms across
several spatial and temporal scales, e.g. neuronal pro-
cesses, these two tendencies can lead to a model that
does not represent the particular system well and thus
impedes the analysis of the system. In the follow-
ing sections we propose a general model for the de-
scription of complex information processing systems
that addresses theses issues by emphasizing the mod-
eling of interactions and employing a description of
the system that is based on the composition of build-
ing blocks which represent functional characteristics
rather than discrete entities.
2 OVERVIEW AND OBJECTIVES
OF OUR APPROACH
In order to support the methodical approach addressed
in the previous section we designed a general model
to describe complex information processing systems.
This approach makes the assumption, that every com-
plex system can be represented by a corresponding
complex information processing system, i.e., that the
complex system can be reduced to a system that only
consists of a set of entities that process and exchange
information. The model we present here was designed
particularly with regard to the following five objec-
tives:
1
sometimes also called individual-based models.
1. Generality. It should be possible to model a di-
verse set of complex systems that would other-
wise be modeled by spezialized types of mod-
els like cellular automata, neuronal networks or
agent-based systems. The ability to model a wide
spectrum of different complex systems is a pre-
requisite for the identification of common patterns
among those systems.
2. Explicit State Representation. The model of a par-
ticular system should have an explicit representa-
tion of it’s state at any time step resulting in an
explicit representation of the models behaviour as
a sequence of states. Such a representation is par-
ticularly useful for comparing the behaviour of in-
dividual models drawn from the model space of a
complex system.
3. Focus on Interactions. The model should facil-
itate the description of complex interactions oc-
curing in a system including aspects of nontrivial
addressing and temporal as well as spatial propa-
gation of information. Complex interactions are
reckoned as key contributing factor to phenom-
ena of self-organization and emergence (Holland,
1998).
4. Expressiveness. The perceived concepts of a com-
plex system, i.e., its different entities, their possi-
bly dynamic relations, and further characteristics
of interest, should intuitively translate into corre-
sponding elements of the model. The structure of
the resulting models should be highly modular. A
modular structure supports the variation of indi-
vidual model elements and thus facilitates the cre-
ation of a broader model space beyond the mere
variation of numerical parameters.
5. Minimalism. The interference between concepts
and structure inherent to the model itself and those
perceived of the complex system that is mod-
eled should be as minimal as possible, i.e., the
model should mitigate the phenomenon known as
“Maslow’s Hammer” (Maslow and Wirth, 1966).
The subsequent description of the model is structured
as follows: Section 3 introduces the four major build-
ing blocks of the model and describes how theses
building blocks relate to one another and how they can
be combined. Section 4 explains how time is repre-
sented in the model, it defines what comprises a state
and describes how state transitions are performed. Fi-
nally, section 5 reviews the presented model with re-
spect to the objectives stated above.
To illustrate the description of the proposed model we
will roughly sketch out the modeling of a simple boid
simulation as an example along the way. Boids (bird-
like objects) were introduced by (Reynolds, 1987) as
ExploratoryModelingofComplexInformationProcessingSystems
515

a simple model of flocking behavior. In essence, the
movement behavior of a boid is governed by three
simple rules
2
:
1. Separation. Steer to avoid crowding local flock-
mates.
2. Alignment. Steer towards the average heading of
local flockmates.
3. Cohesion. Steer towards the average position of
local flockmates.
In addition to these basic rules the model can be ex-
tended with similar rules to avoid obstacles or to stay
in a certain region. Despite this very simple set of
rules a flock of boids can exhibit a surprising variety
of motion patterns.
3 BUILDING BLOCKS OF OUR
MODEL
The proposed model uses an object-oriented ap-
proach. It’s main idea is to model a complex sys-
tem as a combination of four basic building blocks
(proceties
3
, messages, address filters, and procety at-
tributes) which will be described in detail in this sec-
tion. The building blocks can be freely combined to
form descriptive elements that capture specific char-
acteristics of a complex system that do not necessarily
have to coincide with individual entities of that sys-
tem. In this regardour approach differs from common
modeling approaches like cellular automata or agent-
based models
4
which typically divide a complex sys-
tem into a set of disjunct, structural entities like cells
or agents and then assess and attribute their particular
functions afterwards. Contrary, in our approach the
functional attributes of a complex system are identi-
fied first and then combined in the form of building
blocks into corresponding structural elements of the
model.
The first building block of the proposed model are
information processing entities, or proceties in short.
A procety is any element of a complex system that is
able to send and receive information, to create new
proceties and remove existing ones. In case of the
boid simulation, each boid can be interpreted as a pro-
cety: it has to receive information about the positions
and headings of nearby flockmates and it has to send
its own position and heading. Less obvious, possible
2
See also http://www.red3d.com/cwr/boids/ for a de-
tailed description.
3
short form of information processing entities.
4
For an overview of agent-based models see
(Salamon, 2011; Allan, 2010; Railsback et al., 2006).
obstacles in a boid simulation would also be modeled
as proceties that actively send out information about
their presence. As there is no common representa-
tion of an environment in our model, even “passive”
elements have to be modeled explicitly as sources of
information, i.e., proceties, if they are to be perceived
by other entities of the system. At first glance this
property of the model may seem to be a serious draw-
back, but contrariwise, this property helps to achieve
the second objective stated in section 2.
The second building block are messages. They en-
capsulate the information that is exchanged between
proceties. The information that is transferred by a
message can be arbitrary. The recipients of a mes-
sage are determined by its address. The address has
the form of a set expression which allows to describe
the recipients of a message on an abstract and concep-
tual level. It is a key component of the model in order
to achieve the third objective stated in section 2.
The set expression used to specify the recipients of
a message is composed of common set operators like
union or intersection, and sets of proceties that are fil-
tered by address filters – the third building block of
our model. If an address filter is applied to a set of
proceties the filter decides for every procety in the set
if the procety should remain in the set or not. The
information on which the address filter bases its de-
cision is provided by a set of procety attributes that
are exhibited by the individual proceties. Procety at-
tributes are the last building block of the proposed
model. They provide a way to describe attributes that
are shared among a set of proceties. In case of the
boid simulation such a shared attribute could be the
position and the heading of a boid. Based on this in-
formation, a corresponding address filter could then
select all boids that are within a certain distance of
the boid that originated the message – effectively re-
stricting the flow of information from one boid to its
local neighborhood only. In general, shared attributes
are the basic prerequisite for the definition of global
relations among proceties. These global relations can
then be represented as address filters and as such be
used in a set expression to specifiy the recipients of a
message.
In addition to this addressing scheme, messages
feature another important property. They can have an
arbitrary long time to live (TTL) once they were sent
by a procety. This property is the basis for a broad
variety of time-dependent interactions between pro-
ceties. As a simple example, the messages sent by
“passive” proceties like the aforementioned obstacles
in the boid simulation can have an unlimited TTL and
thus must be sent only once. More sophisticated uses
are achieved in combination with appropriate, time-
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
516

dependent address filters. For example, the propaga-
tion of a message over time can be described by an
address filter that selects different sets of recipients
depending on the age of the message, i.e., depending
on how far the message has “travelled”. In the boid
simulation we could use this to model a message of
type “boid cry” that expands radially over time from
the boid that uttered the cry.
The four building blocks of the proposed model can
be summarized as follows:
1. Proceties are “information processing entities” of
a complex system. As such they process informa-
tion which they send and receive in form of mes-
sages. Furthermore, proceties can create new pro-
ceties and delete existing ones.
2. Messages represent information that is transferred
between proceties. The address of a message has
the form of a set expression which allows to spec-
ify the recipients of a message on a high, con-
ceptual level. Furthermore, messages have a TTL
(time to live). That means, they can exist inde-
pendently of any procety for an arbitrary number
of time steps after they have been sent.
3. Address filters are used as a mechanism in the
message addressing scheme of the model. They
represent global relations among sets of proceties
that share one or more procety attributes.
4. Procety Attributes represent common attributes
that are shared among a set of proceties. They
can be used by address filters to determine if the
owner of an attribute should receive a particular
message or not.
As stated at the beginning of this section, the de-
scribed building blocks of our model do not necessar-
ily have an exclusive one-to-one relationship to en-
tities of the complex system that is being modeled.
Instead, an element of a complex system can be rep-
resented by several building blocks at once. For ex-
ample, the procety attribute of a procety could itself
be a procety in its own right that modifies the attribute
values according to the information it receives. A
practical example could be the model of a biological
neuron with its ion channels. In this case, the neuron
as well as the ion channels could be modeled as pro-
ceties, where at the same time the ion channels would
also be procety attributes of the neuron. In such a con-
figuration, the ion channels could independently alter
their behavior in reaction to ion channel specific sig-
nals, i.e., messages, that are directly processed by the
ion channels themselfes and not by the neuron as a
proxy.
4 TIME, STATES, AND STATE
TRANSITIONS
The proposed model operates on a discrete time scale
with steps t ∈ N. At the beginning of each time step t
the state of the model is given by the current states
of all building blocks in the current model. This state
comprises the states of all proceties, messages, ad-
dress filters and procety attributes. The transition of
the state at timet to the state at time t + 1 is performed
by the following three substeps:
1. Use the procety scheduler of the model to gener-
ate a processing schedule that governs which pro-
ceties are executed in substep 2.
2. Prompt each procety in the processing schedule
to process the messages in their local message
buffers.
3. Evaluate the addresses of all messages and dis-
tribute the messages according to the resulting
procety sets to the local message buffers of each
procety.
The use of a procety scheduler in the first step of
the state transition allows to precisely control, how
the proceties are updated during the state transition.
The default procety scheduler of the model facilitates
the synchronous updating of all proceties, i.e., every
procety is prompted to process its messages in ev-
ery time step. However, there are several models for
complex systems that prefer asynchronous updating,
e.g., many agent based models (Caron-Lormier et al.,
2008). In these cases a custom procety scheduler can
be defined to accurately emulate the updating proce-
dure of the particular model.
The separation of the processing of messages in
step 2 and the delivery of messages in step 3 effec-
tively implements a double buffering scheme. This
means that messages that were sent at time t will be
processed earliest at time t + 1. It also guarantees,
that the order of the proceties inside the processing
schedule has no effect on the behavior of the model.
5 REVIEW OF THE OBJECTIVES
The proposed model was specifically designed to sup-
port the process of exploratory modeling. In this re-
gard we defined five objectives to guide the devel-
opment of the model. In this section we review the
model in relation to these objectives.
Generality. There are two main components of the
model that provide the ability to model a wide vari-
ety of different complex system. First, the address-
ing scheme based on procety attributes and address
ExploratoryModelingofComplexInformationProcessingSystems
517

filters facilitates the description of virtually any kind
of static or dynamic relation between the elements of
a system. Secondly, the state representation of the
model provides an implicit double buffering scheme
which, in combination with a customizable procety
scheduler, allows to implement synchronous as well
as asynchroneous updating during state transitions.
Explicit State Representation. As described in
section 4 the state of a system comprises all build-
ing blocks of the model. In addition, the information
that is individually available to a procety in that time
step is represented by the messages inside the local
message buffer of that procety. This state information
is especially usefull, e.g., to extract a communication
graph for every time step that represents which pro-
ceties exchange information with one another. This
graph representation opens up the possibility to use
common graph measures
5
to characterize the dynamic
structure of the interactions occuring in the complex
system. As this representation is independent of the
particular system that is being modeled, it facilitates
the comparison of different complex systems and thus
supports the process of exploratory modelling.
Focus on Interactions. As already stated above, the
addressing scheme provides an effective way to de-
scribe a wide variety of interactions between the pro-
ceties. Furthermore, the ability of messages to exists
for arbitrary long periods of time and the possibility to
define time-dependent address filters yields a whole
new area of interactions that can be modeled, e.g.,
the spatial propagation of signals. The modulation of
messages was not explicitly addressed. However, as
the building blocks of our model can be freely com-
bined, a message can also be a procety or an address
filter for instance. The latter, for example, would al-
low for the manipulation of the message content while
it is propagated over time.
Expressiveness. The building blocks of the model
were designed in the spirit of object-orientation to en-
courage the encapsulation of local knowledge. For
example, when proceties interact by exchanging mes-
sages they use a set expression for addressing other
proceties. This set expression contains only address
filters which typically represent high level concepts
about some relation between the proceties. Thus, a
procety does not need to know much about the other
proceties they are interacting with. The same holds
true for the address filter itself. The filter just relies
on the information provided by specific procety at-
tributes.
5
An extensive review of graph measures can be found in
(Newman, 2003).
Minimalism. The model uses only four building
blocks which represent functional rather than struc-
tural characteristics of a complex system and which
have a very precise and small “conceptual footprint”.
As the building blocks can be freely combined to form
custom model elements there is no need to “force-
fully” fit a perceived concept of a particular complex
system onto a single, non-custom building block of
the model.
In the context of exploratory modeling the use of
building blocks leads to a highly modular structure
which allows to expand the model space by providing
alternative versions of specific model elements. For
example, an address filter that determines the recip-
ients of a message could have a probabilistic coun-
terpart which selects the recipients of a message only
with a certain probability.
6 SIMULATION EXAMPLE
We created a software library using C++ and the
ROOT data analysis framework developed at CERN
(Brun and Rademakers, 1996) to support the imple-
mentation of simulations that use our model. As the
ROOT framework is designed to handle and analyse
large amounts of data, it is well suited for the data
intensive process of exploratory modeling.
As a first test case for our model we implemented
a boid simulation as described in section 2. In ad-
dition to the three basic rules of a boid we added a
rule that keeps the boids confined to a local area. The
primary use of this model was to check the implemen-
tation of our library for errors and to gather a first set
of simulation data that could be analysed within the
ROOT framework.
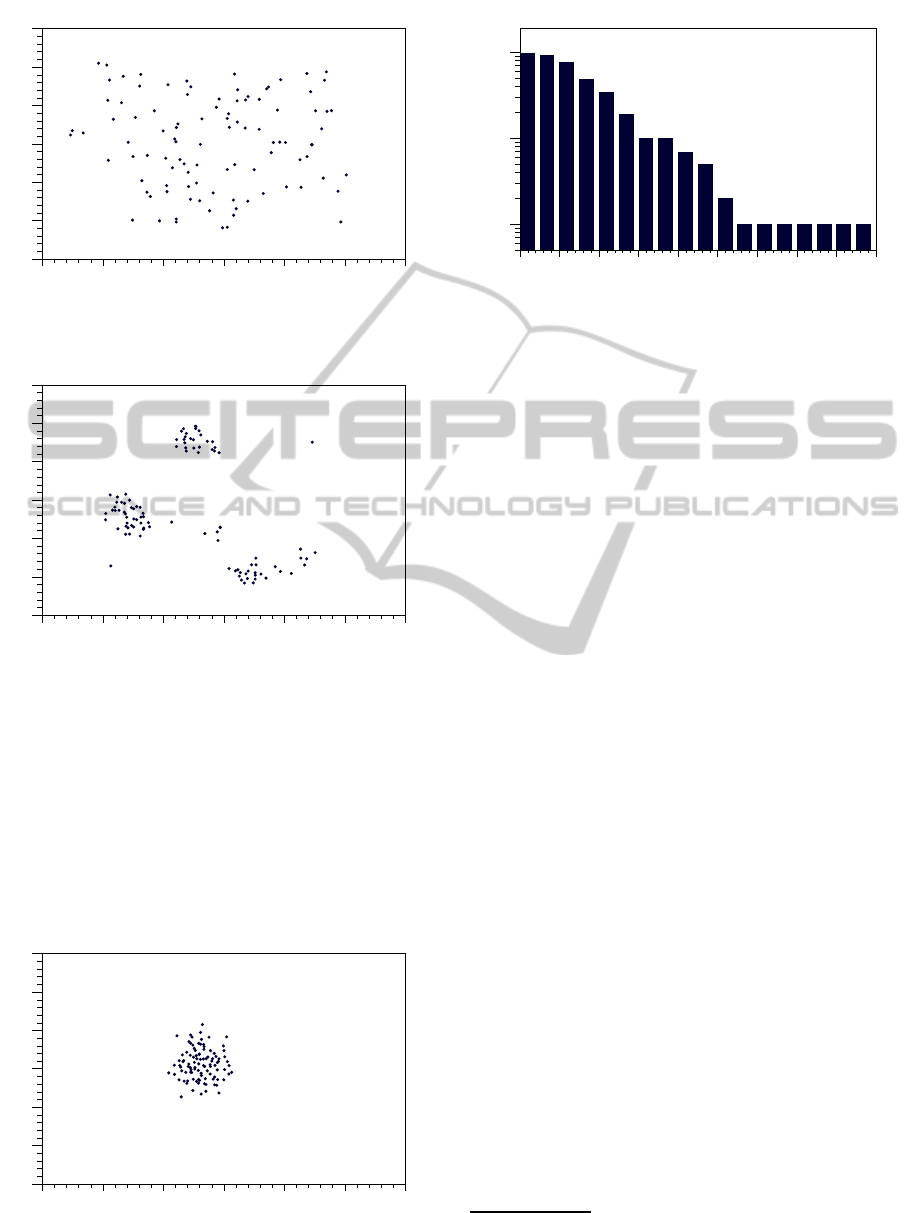
To illustrate one application of exploratory mod-
eling, i.e. the exploration of parameters as described
in section 1, we investigated the influence of the pa-
rameter viewing range of the individual boids on the
observable flocking behaviour. Therefor, we con-
ducted a series of simulations in which we increased
the viewing range stepwise from 5 units to 90 units.
As a measure of “flocking” we used the average num-
ber of clusters that occured within 1000 time steps.
Is the viewing range to short, e.g. only 10 units,
then no observable flocking occurs (s. Figure 1). If
the viewing range is increased to some medium value,
e.g. 35 units, then the emergence of several indepen-
dent flocks can be witnessed (s. Figure 2). However,
if the viewing range is increased further, e.g. to a
value of 80 units, then the dynamic behavior breaks
down and all boids accumulate in a single cluster (s.
Figure 3). Figure 4 summarizes the results of these
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
518
-300 -200 -100 0 100 200 300
-300
-200
-100
0
100
200
300
boid simulation with a viewing range of 10
Figure 1: A representative distribution of boids with a short
viewing range of 10 units.
-300 -200 -100 0 100 200 300
-300
-200
-100
0
100
200
300
boid simulation with a viewing range of 35
Figure 2: A representative distribution of boids with a
medium viewing range of 35 units.
experiments. With increasing viewing range the num-
ber of clusters drop rapidly starting with ∼ 100 clus-
ters at a viewing range of 5 units to ∼ 10 clusters at
a viewing range of 35 units. Starting with a viewing
range of 60 units the simulation averages on one sin-
gle cluster, i.e. no flocking occurs anymore.
This simple example illustrates one application of
-300 -200 -100 0 100 200 300
-300
-200
-100
0
100
200
300
boid simulation with a viewing range of 80
Figure 3: A representative distribution of boids with a long
viewing range of 80 units.
viewing range
5 15 25 35 45 55 65 75 85 95
average number of clusters
1
10
2
10
Influence of viewing range on the number of clusters
Figure 4: The viewing range of the individual boids influ-
ences the average number of clusters that emerge during a
simulation run.
exploratory modeling to increase the understanding of
the dynamic properties of a given complex system.
It provides a first intuition about how the parameter
viewing range influences the overall dynamic behav-
ior of the system. Yet, a full exploration would en-
compass the exploration of more parameters and their
interrelations. Despite its limitations the given exam-
ple hints at a more general property of emergent phe-
nomena. It appears that emergent phenomena might
require a certain amount of local information, i.e. a
local context of a certain size that is neither too small
nor too big.
Observations such as these, gathered from mod-
eling and simulation of different complex sys-
tems within the same framework, may lead to a
more general understanding of phenomena like self-
organization and emergence.
7 CONCLUSIONS
AND OUTLOOK
In this paper we presented a new model for the de-
scription and simulation of complex information pro-
cessing systems. We designed this model specifically
to support the exploratory modeling of complex infor-
mation processing systems. The proposed model dif-
fers from common modeling approaches like agent-
based models in a number of ways:
• Model elements are composed out of a set of
four basic building blocks that represent func-
tional rather than structural characteristics of a
particular complexsystem. This contrasts existing
models
6
where the different model elements such
as cells, agents or messages are used disjunctively.
6
For example NetLogo (Wilensky, 1999) or repast
(North et al., 2006).
ExploratoryModelingofComplexInformationProcessingSystems
519

• The state of the model – including the information
that is sent at a particular time – has an explicit
representation. This facilitates the creation and
application of measures that describe global, dy-
namic properties of the system enabling the com-
parison of systems that would otherwise be too
different to be compared in a more direct way.
• The model focuses on the interactions between
its information processing entities. The building
blocks of the model are designed such that the
modeling of complex interactions is facilitated.
One aspect of this is the ability of messages to ex-
ist over arbitrary long time intervals which, e.g.,
enables modeling of the spatial propagation of a
message.
In our future work we will use the presented model
to investigate phenomena observed in neuronal infor-
mation processing systems as they are a prime exam-
ple of complex systems. Their operation involves a
substantial variety of mechanisms, e.g., fast signal-
ing through action potentials, complex integration of
signals due to dendrite morphology and electrotonic
properties, change of processing characteristics via
neuromodulators, or the constant adjustment of net-
work topology by means of synaptic plasticity (Koch,
2004; Shepherd and Grillner, 2010). Furthermore,
nervous systems develop by evolutionary processes
over millions of years and are able to “bootstrap”
themselves by a process of self-organized growth
within a timescale of weeks to months (Butler and
Hodos, 2005; Squire et al., 2008).
Among the first phenomena that we want to anal-
yse are the mechanisms of self-organization utilized
during nervous system development such as biochem-
ical guidance cues which are used in the context of
neuron migration and axonal path finding.
We think that modeling and simulation of these
neuronal systems will not only result in a better un-
derstanding of the particular processes themselves but
may provide also insight into more general principles
of self-organization and emergence.
REFERENCES
Allan, R. (2010). Survey of agent based modelling and sim-
ulation tools. Technical report, STFC Daresbury Lab-
oratory, Computational Science and Engineering De-
partment, Daresbury, Warrington WA4 4AD.
Bankes, S. (1993). Exploratory modeling for policy analy-
sis. Operations Research, 41(3):435–449.
Bonabeau, E. (2002). Agent-based modeling: Methods and
techniques for simulating human systems. Proceed-
ings of the National Academy of Sciences of the United
States of America, 99(Suppl 3):7280–7287.
Brun, R. and Rademakers, F. (1996). Root - an object ori-
ented data analysis framework. In AIHENP’96 Work-
shop, Lausane, volume 389, pages 81–86.
Butler, A. and Hodos, W. (2005). Comparative Vertebrate
Neuroanatomy: Evolution and Adaptation. Wiley.
Caron-Lormier, G., Humphry, R., Bohan, D., Hawes, C.,
and Thorbek, P. (2008). Asynchronous and syn-
chronous updating in individual-based models. Eco-
logical Modelling, 212(3-4):522–527.
DeAngelis, D. L. and Mooij, W. M. (2005). Individual-
based modeling of eecological and evolutionary pro-
cesses. Annual Review of Ecology, Evolution, and Sys-
tematics, 36(1):147–168.
Dennett, D. (1998). Brainchildren: Essays on Designing
Minds, 1984-1996. Representation and Mind Series.
Mit Press.
Evans, K. M. (2001). Larger than life: Digital creatures
in a family of two-dimensional cellular automata. In
Cori, R., Mazoyer, J., Morvan, M., and Mosseri, R.,
editors, Discrete Models: Combinatorics, Computa-
tion, and Geometry, DM-CCG 2001, volume AA of
DMTCS Proceedings, pages 177–192. Discrete Math-
ematics and Theoretical Computer Science.
Gardner, M. (1970). Mathematical games: The fantastic
combinations of John Conway’s new solitaire game
‘Life’. j-SCI-AMER, 223(4):120–123.
Holland, J. (1998). Emergence. Oxford University Press,
New York.
Koch, C. (2004). Biophysics of Computation: Information
Processing in Single Neurons. Computational Neuro-
science Series. Oxford University Press, USA.
Langton, C. G. (1986). Studying artificial life with cel-
lular automata. Physica D: Nonlinear Phenomena,
22(13):120 – 149. Proceedings of the Fifth Annual
International Conference.
Lempert, R. J., Schlesinger, M. E., and Bankes, S. C.
(1996). When we dont know the costs or the bene-
fits: Adaptive strategies for abating climate change.
Change, Climactic Change, 33:235–274.
Maslow, A. and Wirth, A. (1966). The psychology of sci-
ence: a reconnaissance, volume 8 of The John Dewey
Society lectureship series. Harper & Row.
Minar, N., Burkhart, R., Langton, C., and Askenazi, M.
(1996). The swarm simulation system: A toolkit for
building multi-agent simulations. Santa Fe Institute.
Newman, M. (2003). The structure and function of complex
networks. SIAM Review, 45(2):167–256.
Newman, M. E. J. (2011). Resource letter cs-1: Complex
systems. American Journal of Physics, 79:800–810.
North, M., Collier, N., and Vos, J. (2006). Experiences cre-
ating three implementations of the repast agent mod-
eling toolkit. ACM Trans. Model. Comput. Simul.,
16(1):1–25.
Railsback, S., Lytinen, S., and Jackson, S. (2006). Agent-
based simulation platforms: Review and development
recommendations. Simulation, 82(9):609–623.
Reynolds, C. (1987). Flocks, herds and schools: A dis-
tributed behavioral model. In Proceedings of the 14th
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
520

annual conference on Computer graphics and interac-
tive techniques, SIGGRAPH ’87, pages 25–34, New
York, NY, USA. ACM.
Salamon, T. (2011). Design of Agent-Based Models : De-
veloping Computer Simulations for a Better Under-
standing of Social Processes. Academic series. Bruck-
ner Publishing, Repin, Czech Republic.
Shepherd, G. and Grillner, S. (2010). Handbook of Brain
Microcircuits. Oxford University Press, USA.
Squire, L., Bloom, F., Spitzer, N., Squire, L., Berg, D.,
du Lac, S., and Ghosh, A. (2008). Fundamental Neu-
roscience. Fundamental Neuroscience Series. Elsevier
Science.
Wilensky, U. (1999). NetLogo http://ccl.northwestern.edu/
netlogo/. Center for Connected Learning and
Computer-Based Modeling, Northwestern Univer-
sity., Evanston, IL.
ExploratoryModelingofComplexInformationProcessingSystems
521
