
Design Approaches for Mode Decision in HEVC Encoder
Exploiting Parallelism at CTB Level
Ramakrishna Adireddy and Suyash Ugare
PathPartner Technology Consulting Pvt Ltd, New Thippasandra Main Raod, Bangalore, India
Keywords: Rate-distortion Cost, Coding Tree Block (CTB), Parallel Processing, Mode Decision, Video Quality (VQ).
Abstract: As CPU technology trend is strongly moving towards multi-core architectures, HEVC tried to embrace the
parallel processing trend to possible extent. Hence, HEVC exploits some of the parallel processing
capabilities like tiles, slices and WPP at frame level (Sullivan et al., 2012). Although slices, tiles and WPP
can be used to achieve parallelism, they might end-up degrading either visual quality or compression
efficiency. To address this problem, this paper tries to summarize/exploit the possible parallel processing
capabilities of HEVC at Coding Tree Block (CTB) level with insignificant compromise in video quality and
compression.
1 INTRODUCTION
The emerging video coding standard, High
Efficiency Video Coding (HEVC/H.265) (Bross et
al., 2013), which is also a part of MPEG-H, tries to
achieve up to 50% better compression when
compared to the Advanced Video Coding
(AVC/H.264) standard, while maintaining similar
video quality levels (Sullivan et al., 2012). Although
HEVC uses the same “hybrid” approach and coding
tools similar to prior standards, there are key
differences that enable the enhanced compression.
The higher gains in the compression are the result of
using various high efficiency coding tools available
in HEVC namely - large and variable size coding
blocks, larger and variable size transforms,
Advanced Motion Vector Prediction(AMVP), Merge
prediction blocks and Band Offset Filters & Edge
Offset Filters collectively named as Sample
Adaptive Offset (SAO) filter.
Most of these high efficiency coding tools in the
HEVC encoder are computationally intensive. Also,
since HEVC provides more options to encode a
picture, the challenge at the encoder side is to decide
the “most suitable combination” of the coding tools
for encoding such that both rate and distortion are
minimized to the best possible levels (Bossen et al.,
2012). The “most suitable combination” of blocks
and modes is decided by the mode decision process
of an encoder. Main focus of this paper will be on
understanding the impact of mode decision flow of
an encoder on computatonal complexity and
resulting compression efficiency.
The rest of the paper is organized as follows.
Section 2 briefs the encode mode decision details
that have been considered for the proposed
approaches implementation. In section 3, we brief
the proposed approaches and in section 4, we carry
out comparative study and analysis of proposed two
approaches. Finally, section 5 concludes the paper.
2 OVERVIEW
The ultimate goal of any video coding standard has
been to achieve maximum compression without
compromising on the quality of encoded video.
Mode decision in an encoder is responsible for
making optimal decisions to achieve the said
encoder goals with respect to complexity and video
compression. For a Coded Tree Block (CTB), mode
decision in HEVC encoder comprises of making the
following set of decisions:
Intra prediction Direction for intra prediction
block(PB)
Motion Vector (MV) for inter PB
Merge Decision for Inter PB
Best Part Mode for Intra CB – 2Nx2N/NxN
Best Part Mode for Inter CB
2Nx2N/2NxN/Nx2N/NxN/2NxnU/2NxnD/nLx2
N/nRx2N
23
Adireddy R. and Ugare S..
Design Approaches for Mode Decision in HEVC Encoder - Exploiting Parallelism at CTB Level.
DOI: 10.5220/0004613600230027
In Proceedings of the 10th International Conference on Signal Processing and Multimedia Applications and 10th International Conference on Wireless
Information Networks and Systems (SIGMAP-2013), pages 23-27
ISBN: 978-989-8565-74-7
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
Intra CB versus Inter CB decision at all depths
Skip Decision for CB
Depth of a Coding Block (CB)
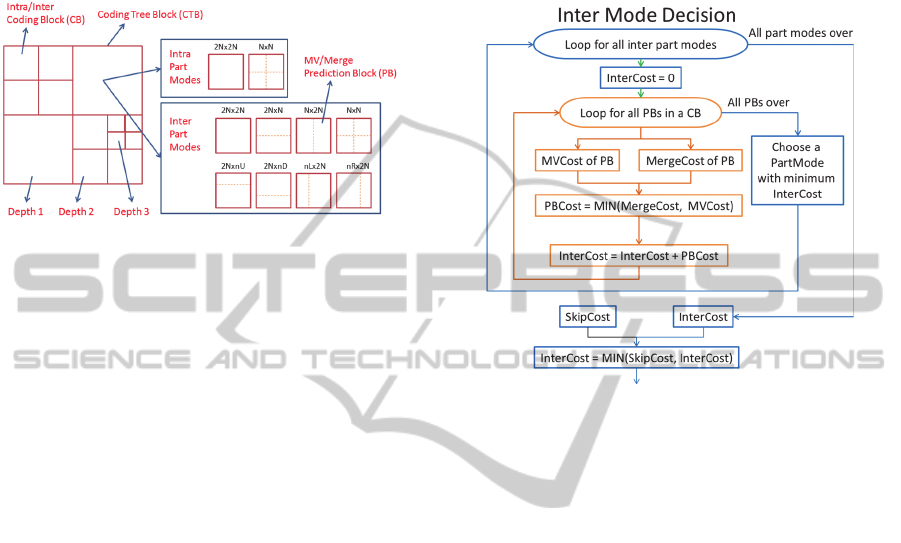
The above decisions may lead to a CTB as shown in
Fig.1.
Figure 1: CTB splitting.
Mathematically, mode decision process has to
minimize cost of the CTB by optimizing rate and
distortion of a CTB so that video compression is
better. According to Lagrangian cost minimization
technique (Sullivan et al., 1998), cost of a block
(CTB/CB/PB) is calculated as
Cost = D + λ* B (1)
where, D is the distortion of a block, B is the bits
required for encoding a block and λ is the
Lagrangian Multiplier whose value majorly depends
on the quantization parameter(QP). Whenever a
decision is to be made between two choices, the
option with lower cost is chosen for coding.
2.1 Inter Mode Decision
For each CB/PB, the process shown in Fig.2 is
applied to take a decision between Inter, Merge and
Skip by comparing their costs. Also, decision is
made to select the best part mode for a CB. Skip can
be coded for a CB only when part mode is equal to
2Nx2N, unlike MV and merge which can be coded
for every part mode. MVCost of a PB is the sum of
MVD bits and prediction error bits. MergeCost of a
PB is the sum of merge index bits and prediction
error bits. SkipCost is the penalty for the distortion
introduced by coding a skip CB.
MV coding cost (MVCost) of a PB is estimated
by Motion Estimation (ME) and Advanced Motion
Vector Prediction (AMVP) technique. Merge cost
(MergeCost) is estimated by using the merge
candidates list. Skip coding decision also depends on
the merge candidate list. Note that, all three
calculations, merge MV, skip MV and AMVP
calculation use the neighbouring coding blocks’ MV
information (Bross et al., 2013). Neighbouring MV
information is used to estimate the coding cost (bits)
of a CB and prediction error is used for estimating
distortion. Output of Fig.2 is Inter Cost of a CB,
featuring a combination of inter and merge PBs or a
skip CB and their corresponding MVs.
Figure 2: Inter coded block mode decision.
Inner loop runs for all PBs in a CB and makes a
decision between Merge PB and Inter PB for all PBs
of a part mode. Outcome of this decision is PBCost,
which is the best of MergeCost and MVCost.
InterCost of a CB is the sum of all PB costs of a
given part mode.
Outer loop runs for all possible part modes and
selects a best part mode having minimum cost. Best
part mode is the one which has minimum cost
according to Eq. 1. After deciding a best part mode
for a CB, its cost is compared with the skip cost to
decide between skip and inter. The final cost of inter
CB is InterCost.
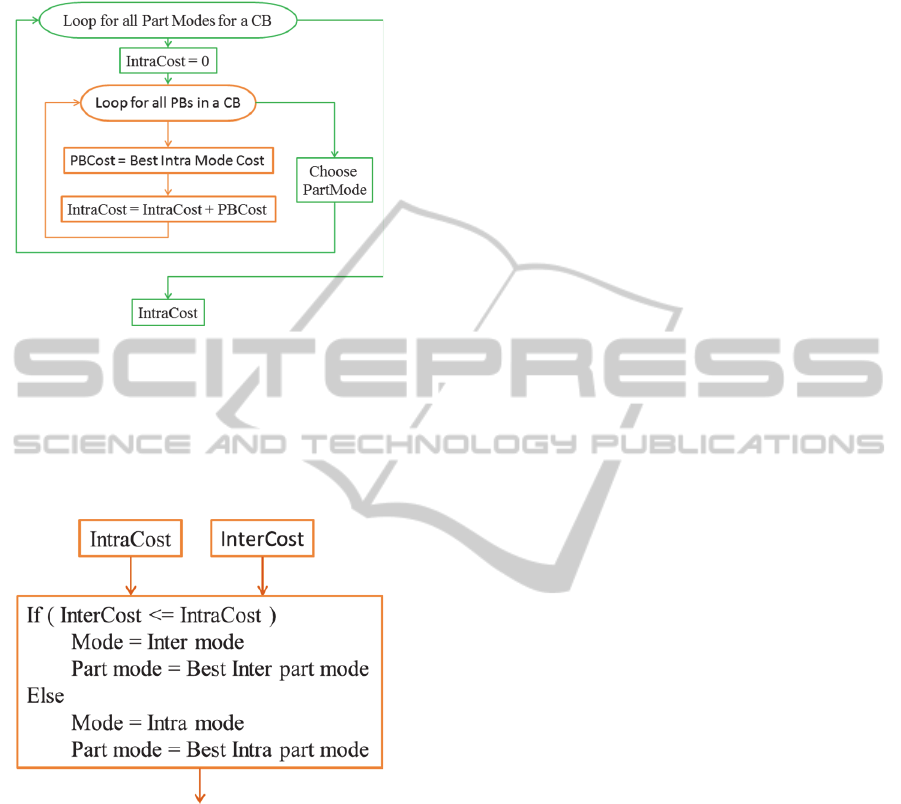
2.2 Intra Mode Decision
Process used for intra CB mode decision is similar to
inter CB mode decision flow and is shown in Fig.3.
There are 35 different intra coding modes for a PB.
The process involves selecting a Rate-Distortion
(RD) optimal part mode for a CB (Choose PartMode
in Fig.3) and an RD optimal intra coding mode for
each PB within a CB (PBCost = Best Intra Mode
Cost in Fig.3). In estimating intra mode cost Most
Probable Mode (MPM) list is used for estimating
coding bits and prediction error is used for
estimating distortion, which depends on the spatial
neighbors of the block. Thus, the output of intra
mode decision process is IntraCost comprising of
SIGMAP2013-InternationalConferenceonSignalProcessingandMultimediaApplications
24
best part mode of the CB and intra mode for each PB
within a CB.
Figure 3: Intra coded block mode decision.
2.3 Intra-Inter Decision
Intra-Inter mode decision process happens for every
CB. Before entering into this process, IntraCost and
InterCost are computed for a CB.
Figure 4: Intra-Inter decision.
InterCost estimate consists of selecting the part
mode of CB and MV/Merge/Skip information of PB.
IntraCost estimate consists of part mode of CB and
selection of intra prediction direction for each PB
within a CB. The decision process involves selecting
the mode with minimum cost as the best mode as
shown in Fig.4.
2.4 Depth Decision
CB can be coded as a single CB or it can be further
split in to a quad tree (4 CBs). Decision has to be
made whether a CB is to split or not. This is done by
comparing the cost of a CB (C) with the sum of
individual sub-CBs cost after the split. If the split
sub-CB cost (C0+C1+C2+C3) is better than the non-
split CB, then the CB is split in to a quad tree. In this
process each CB can be Inter or Intra. Any CB
resulted out of the split CBs can be further split into
in to 4 CBs as seen in Fig.1.
3 APPROACHES TO MODE
DECISION
This section discusses two different approaches for
CTB mode decision. In each approach there are
trade-offs between Video Quality (VQ) and
performance. Each CTB in a frame passes through
the mode decision phase before encoding the H.265
video stream. The two methods discussed below
make an assumption that the encoder processes all
the CTBs one-by-one. Following convention is used
below during discussions - DxCBy refers to Depth x
and CB y, where x = {0, 1, 2, 3} and y = {0, 1, 2 …
64}. For simplicity, in sections 3.1 & 3.2 discussion
is limited to x = {0, 1, 2} and y = {0, 1 …15}
3.1 Method 1 (Ideal VQ)
This method is the one used in reference software,
called the HEVC Test Model (HM10.0, 2013).The
whole process is divided into stages and in each
stage decision is made between two CU depths. The
approach is shown in Fig.5. Each stage is
represented with different color. The numbers within
the CTB or CB indicate the index of a CB at
respective depth. The table shows the processing
method for mode decision.
In the example shown below, 3 depths (D0, D1
and D2) are possible for a CTB of size 32x32. Each
depth has 4
depth
CBs. For each of the CB, at every
depth, Inter Mode Decision, Intra Mode Decision
and Intra-Inter Decision is performed as discussed
earlier in sections 2.1, 2.2 and 2.3 respectively. At
each stage, decision is made whether the CB has to
be split into 4-CBs or it’s to be coded as a single CB
as discussed in Depth Decision.
Stage 1 computes and compares depth-1 cost for
index-0 (D1CB0) and sum of depth-2 cost for
indices 0, 1, 2 and 3 (D2CB0 + D2CB1 + D2CB2 +
D2CB3). Decision is made whether the block is to
be coded as split (depth2) or non-split (depth1)
based on the cost and the resulted best cost is
updated to D1CB0. Stage 1 execution ends here. In
stage 2, similar process is carried out for taking the
split decision for D1CB1. Here cost of depth 1 index
1 (D1CB1) is compared with the sum of cost of
DesignApproachesforModeDecisioninHEVCEncoder-ExploitingParallelismatCTBLevel
25
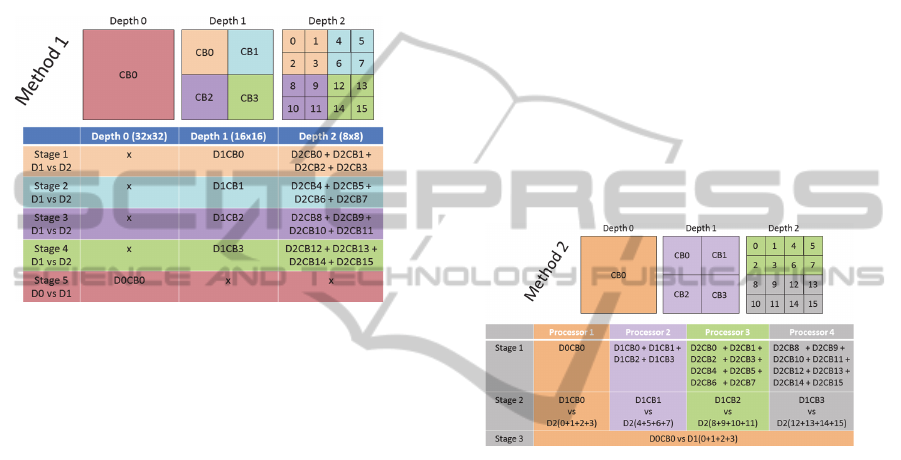
depth 2 indices 4, 5, 6 and 7(D2CB4 + D2CB5 +
D2CB6 + D2CB7). The cost is updated in D1CB1.
Similarly in stage 3 and stage 4 split decisions are
taken and the best cost is updated in D1CB2 and
D1CB3. Once stage 4 is completed, stage 5
compares the cost of depth-0 DOCB0 and total cost
of split CTB (D1CB0 + D1CB1 + D1CB2 +
D1CB3). Note that the cost at depth 1 can be sum of
costs at depth 2. Decision is made whether the depth
0 CB is split or not split.
Figure 5: Different stages in Method-1 flow.
In this method, execution of all stages is
sequential. The sequential flow has an advantage
that the neighbor blocks’ (Left, Top, Top Left, Top
Right and Bottom Left) “accurate” information is
available to the CB being processed. Accurate
neighbor information refers to the to-be-coded mode
information of the neighbors. Since accurate
neighbor information is available to CB, it is
possible to generate exact AMVP list and Merge list
for Inter Mode Decision and MPM list for Intra
Mode Decision, which helps to estimate the bits
required for coding in a more precise manner. Thus,
it is possible to estimate the rate during cost
computation with greater accuracy or rather exactly.
This decision process is able to choose the RD
optimal MVP index, Merge index and MPM index
for inter, merge and intra blocks, respectively.
The approach used in this method is more
suitable for an encoder which has to achieve very
good compression at lower bitrates, which is a high
quality encoder. Also, it is suitable for encoders
which perform the full rate distortion optimization
(RDO) using Lagrangian Optimization or using
Viterbi algorithms. Although this method delivers
good results in compression and quality, this method
is computationally expensive and unfriendly to
multi-processor/parallel-programmable system. This
method’s sequential nature makes each succeeding
stage to wait for the current stage to get completed.
3.2 Method 2 (Performance Friendly)
The approach used in this method is more suitable
for an encoder which has to achieve good
performance (in multi-processor scenario) with a
little compromise on quality. Although, slight
compromise is made w.r.t. neighbor information
availability to the current CB during cost estimation.
Method 2 achieves better performance by taking
advantage of parallel processing. The approach used
in Method 2 is shown in Fig.6.
The example discussed here assumes that a
maximum of 3 depths are allowed and 4 processors
are available for processing. The color in the figure
indicates that the processor on which the block of
data is being processed. The entire mode decision
process is divided into three stages. Each stage is
executed by one or more processors depending on
the stage or on the availability of the processors.
Figure 6: Different stages in Method-2 flow.
In the first stage, each processor operates on one
depth. Processor 1, processor 2, processor 3 and
processor 4 operate on depth 0, depth 1, depth 2
(top) and depth 2 (bottom), respectively. To balance
the processing load, cost computation process in
depth2 is split between processor 3 and processor 4.
At the end of stage 1, the cost of each CB is
available at all depths. All the processors need to
sync after stage 1. In stage 2, decision is made
whether each CB of depth 1 (D1CB0, D1CB1,
D1CB2 and D1CB3) needs to be split to depth 2 or
to be coded at depth 1. The decision process for each
of the 4 CBs can be parallelized across the 4
processors. Again all the processors need to sync
after stage 2 is completed. In stage 3, decision is
made whether the depth 0 is to be coded or the
output of stage 2 is to be retained.
Approach used in method 2 makes good use of
multi-core processing environment. Method two can
be modified easily to work on different number of
cores or even a single core. Since method 2 does not
use accurate neighbor information for estimating the
SIGMAP2013-InternationalConferenceonSignalProcessingandMultimediaApplications
26

cost, there is a possibility of selecting a suboptimal
mode for coding.
4 COMPARISON OF TWO
APPROACHES
Both the methods have their own pros and cons.
Method 1 is more useful in scenarios where high
quality and greater compression is primary
objective. Method 2 is more useful in scenarios
where parallel-processing is possible and
performance is of prime importance.
In method 1, all CBs at a given depth cannot be
processed in parallel. Each CB has to wait until the
intra-inter decision process and reconstruction of the
previous CB is completed. Intra prediction uses
reconstructed neighbor samples during intra
prediction direction selection. Inter prediction uses
the actual neighbor mode information for
AMVP/Merge/Skip decisions, which helps
achieving better RD cost. In method 2, since coding
blocks are processed in parallel, intra mode decision
process cannot use reconstructed pixels for
prediction. Also intra mode decision and inter mode
decision process does not have access to the
neighbor mode information and have to function
assuming the neighbor mode information for
decisions. Hence the modes selected in method 2 are
with some approximations which affect the
compression efficiency.
Method 1 is more suitable for encoders which
perform full RD during mode decisions as accurate
neighbor information is available to all CBs which
contribute in achieving better compression when
compared to method 2. Although Method 1 tries to
deliver better quality, it cannot take greater
advantage of multi core processing when compared
to Method 2.
5 CONCLUSIONS
In this paper, we proposed a novel method to exploit
the parallelism at CTU level in multi-core/multi-
processor scenario. We described both the traditional
and proposed design approaches for mode decision
and compared them for performance and video
quality/compression. Also, briefed the details of
applications in which each method can be adopted
for better results.
Since the experiment of proposed method is
preliminary, we have only presented the ideas and
approaches to exploit parallelism at the lowest
possible granularity. So, our future work will include
evaluating the performance gain & trade off in
coding quality gain compared to the traditional
approach. As well, future work can consider the
proposed approach in hardware realization.
REFERENCES
B. Bross, W.-J. Han, G. J. Sullivan and T. Wiegand, 2013.
High Efficiency Video Coding (HEVC) text
specification draft 10 (FDIS). In JCT-VC 12
th
meeting,
Geneva, CH.
G. J. Sullivan, J.-R. Ohm, W.-J. Han and T. Wiegand,
2012. Overview of the High Efficiency Video Coding
(HEVC) Standard. In IEEE Trans. on Circuits and
Systems For Video Technology, vol.22, no.12,
pp.1649-1668, Dec, 2012.
F. Bossen, B. Bross, K. Suhring and D. Flynn, 2012.
HEVC Complexity and Implementation Analysis. In
IEEE Trans. on Circuits and Systems For Video
Technology, vol.22, no.12, pp.1685-1696, Dec, 2012.
G .J. Sullivan, T. Wiegand, 1998. Rate-Distortion
Optimization for Video Compression. In IEEE Signal
Processing Magazine, vol.15, pp.74-90.
HEVC Test Model Ref. software 10.0 (HM10.0), 2013.
Available:https://hevc.hhi.fraunhofer.de/svn/svn_HEV
CSoftware/tags/HM-10.0/
DesignApproachesforModeDecisioninHEVCEncoder-ExploitingParallelismatCTBLevel
27
