
Heterogeneous Multiprotocol Vehicle Controls Systems in Cloud
Computing Environment
Vladimir S. Zaborovski
1
, Mikhail Chuvatov
1
, Oleg Gusikhin
2
, Abdulaziz Makkiya
3
and David Hatton
3
1
Telematics Department, St. Petersburg State Polytechnic University, St. Petersburg, Russia
2
Research and Advanced Engineering, Ford Motor Company, Dearborn, Michigan 48121, U.S.A.
3
Connected Services Systems Organization, Ford Motor Company, Dearborn, Michigan 48121, U.S.A.
Keywords: Cloud Technology, Roads Services, Heterogeneous Multiprotocol Cloud Computing Environment, Mesh
Network, Wi-Fi (802.11), LTE Technology, and DSRC.
Abstract: The paper introduces a heterogeneous multiprotocol cloud computing environment for vehicle monitoring
and applicable services. It also highlights the concept behind virtual vehicle communication with multi-
protocol data access. Cloud based vehicle servicers require constant access to the Internet, which can be
organized using a combination of local (Wi-Fi, DSRC) and the wireless communication technologies. The
paper discusses the advantages of multi-protocol communication with the possibilities of alternative ways of
delivering messages between vehicle and a cloud. The paper presents simulation of different scenarios with
respect to the technology used.
1 INTRODUCTION
With the emergence of cloud computing many
existing vehicular applications may be enhanced
along new functional dimensions, including online
access to high performance computing algorithms
and practically unlimited data storage resources.
Cloud services are now being considered as a source
of various innovations in the information and
management spheres which can further empower
existing Vehicle Controls Systems (VCS). These
new services would need to be in accordance with
performance and security requirements of future
intelligent control systems. Expanding the range of
these services leads to an increase in the volume
and/or value of data that flows between vehicles and
creates new content for automotive protocols.
Objects and subjects of cloud services can be
divided into three main categories: 1)
communication infrastructures which support active
safety features in avoiding accidents and traffic
congestions 2) elastic access systems shared with
high performance data processing, monitoring and
channel integration services 3) ubiquitous storage
systems to store data sessions and archive traffic and
vehicle information. The applications of such cloud
services can be utilized by various industries and
parties including automakers' analytic centres,
drivers, passengers, emergency departments, vehicle
owners, regional traffic centres, dealerships, and
road services. Operative interaction between users
and information resources forms scalable
frameworks for:
Monitoring the technical condition of vehicles;
Traffic control and emergency assistance
Insurance settlements with customers;
In-vehicle entertainment;
Solutions for intelligent transportation systems.
In the existing VCS, most operations use
resources of embedded computing. An alternative
approach is to perform some non-safety critical
operations remotely while exchanging information
with the vehicle using on-board wireless
communications appliances. Although the idea of
transferring some of the computational tasks to a
remote server is straightforward (see figure 1); its
technical implementation is challenging and so far
has been focused mainly on infotainment
applications. In this paper we propose a multi-
communication protocol solution that can facilitate
intelligent computation of the data exchanged
between the vehicle and the infrastructure and vice
versa. This solution shall eliminate some of the
current existing complexities accompanied by the
single protocol approach.
555
S. Zaborovski V., Chuvatov M., Gusikhin O., Makkiya A. and Hatton D. (2013).
Heterogeneous Multiprotocol Vehicle Controls Systems in Cloud Computing Environment.
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics, pages 555-561
DOI: 10.5220/0004621505550561
Copyright
c
SciTePress
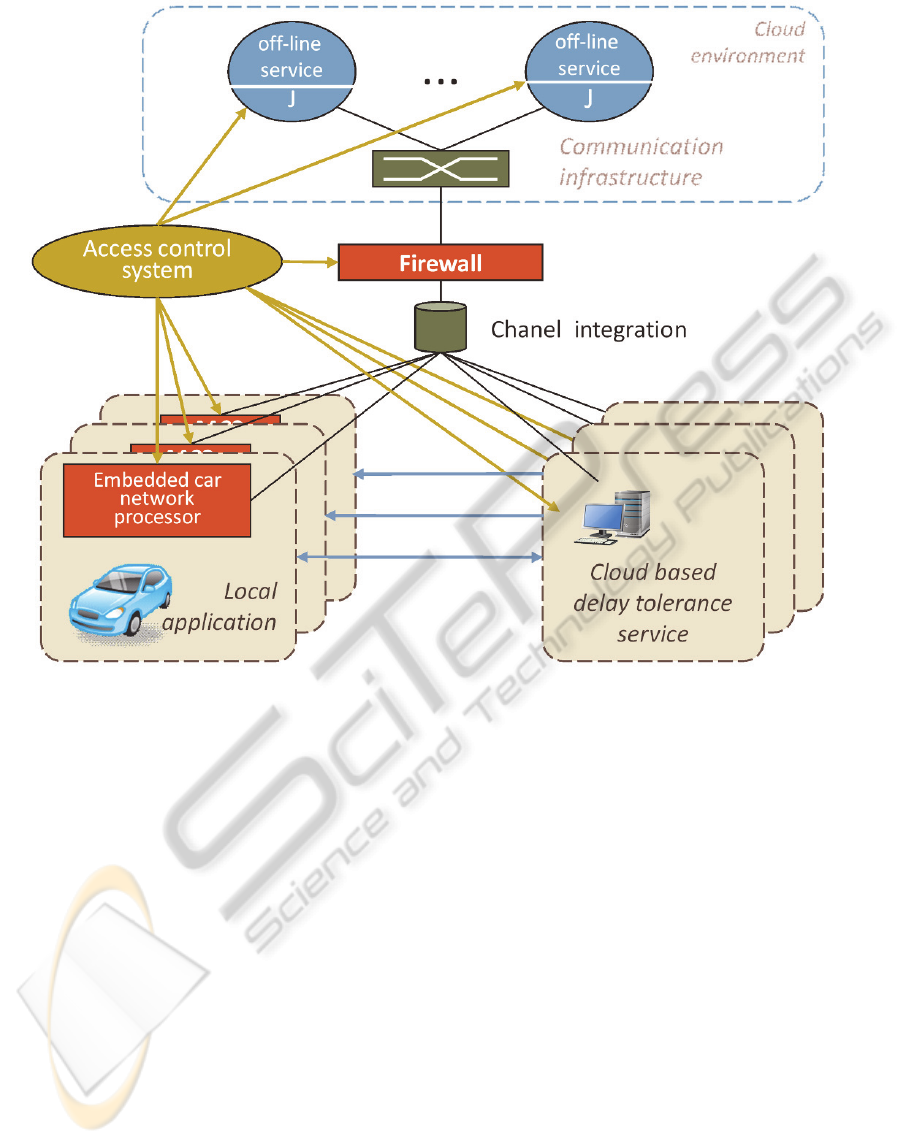
Figure 1: Basic cloud environment running local and remote service.
Each vehicle is treated as a source of information
to the cloud environment and to other vehicles
simultaneously. The vehicle control system itself
shall have a non-zero probability to crash or fail.
However, the flow of data from vehicle via wireless
mediums is susceptible to interference that can
disrupt connectivity and interaction of network
nodes and service components. In this case, the
reasonable metric of effectiveness of the tasks listed
above is the probability of delivering the message in
a given time interval from the source to a particular
destination within the shared cloud infrastructure.
Delivery probability is a controlled parameter which
is a function of the cloud resources needed to
process requests for services. For example, fault
tolerant implementation of supervisory tasks, such as
route planning or vehicle speed set-point can be
achieved with requested level of probability relying
on the distributed cloud computing power.
Furthermore, service agents which interact with
vehicle applications and run on a remote virtual
machine (VM) can improve or even optimize vehicle
performance by analyzing historical driving patterns
along the same route over many different conditions.
Cloud based approaches allow the extension of the
existing vehicle on-board resources by taking
advantage of collaborative services. However, the
probabilistic nature as well as latency in delivering
urgent information can delay the delivery of safety
critical applications running over shared cloud
resources. Today, not all vehicles are equipped with
wireless access appliances and the wireless network
coverage is not optimum for various wireless
technologies. To overcome this obstacle we
introduce the concept of a heterogeneous
multiprotocol cloud computing environment which
integrates different architectures of MESH networks,
DSRC, and LTE. Adaptive capabilities of such
infrastructure are formed by the use of resources and
protocols that under specific circumstances can
increase the probability of timely delivery of
information necessary for control purposes using
different communication media, for example,
embedded vehicle’s controllers equipped with Wi-
Fi, and LTE interfaces.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
556

2 HETEROGENEOUS CLOUD
COMPUTING CONCEPT
The use of different communication mediums and
protocols which deliver data from the vehicle to the
cloud services and vice versa can improve traffic
safety and route planning only if we can expand the
functionality of embedded computing systems by
using the concept of multi-protocol access gateway
between vehicle and distributed network resources.
In this case each vehicle in the cloud environment
can be viewed as virtual agent (Gusikhin, 2011).
This virtual agent, that we will call virtual vehicle
(VV) encapsulates an information trail on the data
being processed by a vehicle. VV is an active agent
of information relations which holds information
about the current resources and local properties of
the vehicle environment. In heterogeneous cloud
environments VV may play a role of active data
source which contains essential static (do not
changes during control operations) and dynamic
parameters (environment conditions, GPS
coordinates, supervisory commands, fuel
consumption, or control signals, etc), information
about vehicle motion and/or driver behavior
(Zaborovsky, 2011) (Mulukha, 2011). VV is a
logical node in MESH segments and a virtual
resource on IaaS level which combines actual
vehicle’ data with wealth of information available
from computational and storage resources. The
programmable and multiservice nature of VV
provides a wide variety of opportunities to realize
intelligent control algorithms and merge together
different models of vehicle motion with global data
and goal oriented forecasts in which VV is
represented as an intelligent agent of heterogeneous
the cloud/MESH environment. VV may be viewed
as a subject of appropriate control decisions which
are based on ubiquitous high performance cloud
computing platform (“hpcc-platform”) and storage
resources that are available as a service. Once a
vehicle has been driven on the road, its VV image
becomes a part of cloud-based services which
monitors the vehicle during all control sessions.
There are several advantages behind such a
heterogeneous architecture. High-computational and
communication power associated with the cloud
environment is a major source that can significantly
extend the operational and optimization capabilities
of a new generation of VCS. Cloud-centric VCS
form composite decisions based on the fusion of
different factors including vehicle dynamics,
specific constraints, on-line information from road
sensors about surrounding moving and non-moving
objects. All VCS operations such as routing or
vehicle parameters optimization may be done at
different performance rates. This rate can be
accelerated by reconfigurable (Msadaa, 2010)
available virtual and computing resources in
accordance with vehicle speed.
The concept of virtual machine in the
heterogeneous environment of the cloud
architecture, that we are proposing, provides the
implementation of fault-tolerant, powerful and
flexible tool for managing the traffic services, roads
infrastructure, and vehicle data. The implementation
of such concept which is based on the organization
of access to cloud services is executed through the
currently existing wireless and hard-wire
connections of the various technologies. Those
connections can be placed on vehicles, on objects of
road’s infrastructure and services providers. That
leads to simultaneous use of communication
channels of various technologies for improved
accessibility to cloud services which requires
integration to the shared wireless multiprotocol
network of data communication.
3 MULTIPROTOCOL
COMMUNICATIONS
To fully leverage cloud-based infrastructure in
providing different vehicle services, especially
within mission critical tasks we need to ensure a
fault tolerant communication infrastructure with a
given probability of message delivery within a given
time interval. The lack of a stable 2G/3G/4G
coverage in the highways and transportation
infrastructure along with the impracticality to equip
each vehicle with an access device to the local and
global networks leads to the need of developing
alternative methods of data communication with the
cloud.
The model proposed in this paper is centred
around using existing industry standards represented
by mesh networks, Wi-Fi (802.11), DSRC and LTE
(
Yoon, 2010) (Navarro, 2007) technology. However, in
practice, the implementation of this approach faces a
number of challenges:
Incompatibility of network equipment;
High costs of implementation of new
technologies;
Difficulty to ensuring reliability in case of high
message rate.
The first problem can be solved by using
network access devices with reconfigurable multi-
HeterogeneousMultiprotocolVehicleControlsSystemsinCloudComputingEnvironment
557

frequency radio interfaces that are at the software
level compatible with the protocols of global and
local wireless networks.
To support processing of information
interactions mentioned above requires designing a
new generation of multi-protocol routers for DSRC,
LTE, MESH, WI-FI networks. Such routers should
synthesize optimal paths taking into account the
nominal and available bandwidth as well as ongoing
delays of delivering data packets or control
information. These routers should have a well-
defined relationship between: 1) data rate and the
available virtual channel bandwidth, 2) routing
policy and the current network topology, and 3)
routing algorithms and the data characteristics type
the characteristics of the data link layer protocols.
The basis of these routers are the multi-core multi-
threaded network processors whose functionality are
extended through the use of FPGA co-processors
which provide high-performance internal operations
for multi-band processing of the incoming traffic.
The solution for the second problem can be done
by using the method of "seamless" roaming between
Wi-Fi, 2G/3G/4G, which are based on technology
Hotpsot 2.0 (Next Generation Hotspot - NGH).
NGH technology provides an authentication
procedure and handover, as well as support for
automatic logon of mobile devices to the network
without the need for re-authorization (Heller, 2006)
(Andreev, 2010).
The effect of the third problem can be mitigated
by using recommendations from 802.11 x protocol
suite that allows creating Wi-Fi network that
supports alternative data routes. Development of
mesh Wi-Fi infrastructure based on the 802.1x
specification provides self-organization of networks
and increases the ability of networking recovery in
case of failure of the switching nodes.
IEEE 802.11v specification provides support
mechanisms for controlling the radio parameters in
order to reduce energy consumption which is
important to support self-contained modules that are
unable to regularly recharge (for example, in the
vehicle). The promising solution that can improve
communication sessions for short-range areas is to
use 60 GHz frequency band with peak data rates up
to 7 Gbit/s in accordance with the recommendations
of Wireless Gigabit Alliance (Arbabi, 2010).
A common solution to these problems is to create
a multi-protocol access point (MPAP) which helps
to raise the reliability of message transmission in
areas with low density of network stations or
difficult terrain. From the technical point of view,
MPAP is a modular hardware and software system
that supports concurrent messaging technology and
robust routing algorithms. Functional requirements
of the MPAP are the follows:
1. Connecting to the vehicle.
2. Connecting vehicle to the wireless data
networks.
3. Relaying messages between networks of
different technologies.
4. Sustained interaction with the objects of road
infrastructure.
5. Effective interaction with providers of data
networks.
Figure 2 shows the block diagram of MPAP.
Currently, stationary transmitters of road
infrastructure and vehicle messages regarding road
conditions, which inform drivers and embedded
controllers about the state of traffic lights, signs,
specific facts of reducing distances and intervals
between vehicles, or the presence of congestion and
accidents on the road.
DSRC is an optimum solution to send short
messages between vehicles and emergency
infrastructures in a very short period of time. The
advantage of technology is the short time connection
between the stationary and mobile transmitters, high
speed data transfer and the maintenance of a stable
connection with vehicles moving at high speeds.
The use of DSRC technology in the network of
stationary and mobile devices allows creating
effective message delivery system for cloud
services. In this case, the DSRC technology is
implemented at the transport layer and controls
delivery of high-priority messages that are generated
as a result of the integrated emergency call system.
These messages transmitted not only via
dedicated channel associated with the specific
emergency network but also using LTE or 3G
wireless networks (Gramaglia, 2011). Simultaneous
and parallel transmission of emergency messages
using different protocols and two independent
network infrastructures can significantly reduce the
time and increase the likelihood of message delivery
to the specified address.
4 SIMULATION EXPERIMENT
A study of the possibility of delivery of emergency
messages from the vehicle to vehicle with an output
interface to the cloud computing environment by
means of LTE channels was also conducted in this
paper.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
558
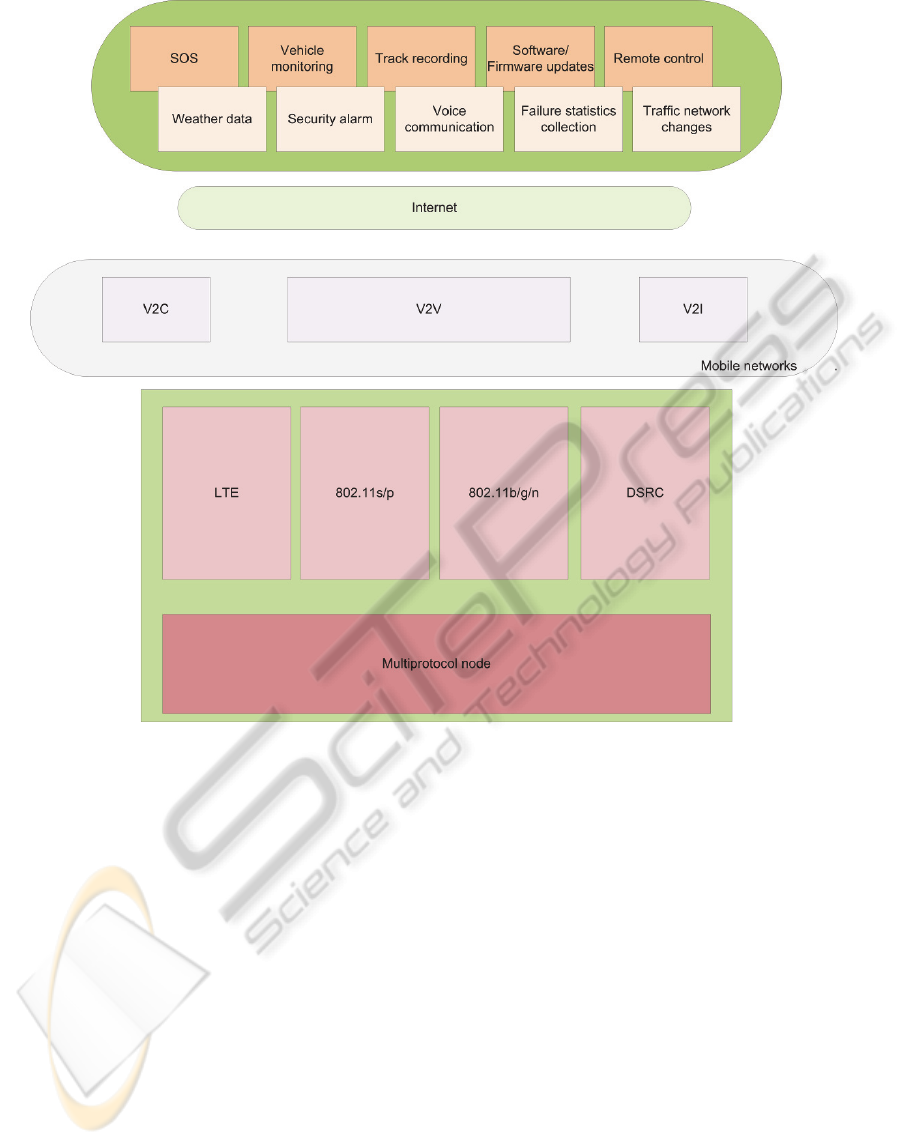
Figure 2: The block diagram of MPAP.
The first experiment consists of fragmenting an
800 meters road that contains 4 turns at 90 degrees.
The road has 4 lanes broken down by 2 on each side,
on the fragment of the road there are always 8 or 16
vehicles (1 or 2 vehicle for every 100 meters)
equipped with 802.11s (number of vehicles leaving
the fragment is equal to the number of road vehicles
that fall in this fragment of the road) - one half of the
total number of vehicles are moving in one direction
and the other half of the vehicles are moving in the
opposite direction. Traffic is moving according to
the IDM model with the following parameters:
maximum speed of 10 to 100 miles/hr - varied in
increments of 10 miles/h (parameter of the
experiment), the distance between any two vehicles
is at least 4 m, the acceleration of 5 m/s
2
. One
vehicle is equipped with a dedicated LTE modem.
The simulation also included one vehicle that
transmits emergency messages to the infrastructure
and the other vehicles via the mesh network. The
experiment evaluated the percentage of delivered
emergency messages.
Figure 3. shows a graphical representation for the
results obtained from simulating the mesh network
under different conditions. The results of the
experiments with MESH network using NS3
simulator (Yoon, 2010) (Heller, 2006) which is
based on 802.11s shows clear relationship between
vehicle speed and the distance between vehicles and
the total loss rate (Fig. 3).
Analysis of the data presented in Figure 4 shows that
at speed of 100 miles per hour and traffic density of
1 or 2 vehicles on a road segment of length of 100
meters a loss percentage of 78-92%. It can be
concluded that in such condition of movement it is
necessary to increase the density of vehicles that are
equipped with on-board 802.11s transmitter or to
create alternative ways of delivering emergency
messages.
In the second experiment we consider the same
simulation parameters: four-lane road and traffic
model with 16 vehicles available on the road.
HeterogeneousMultiprotocolVehicleControlsSystemsinCloudComputingEnvironment
559
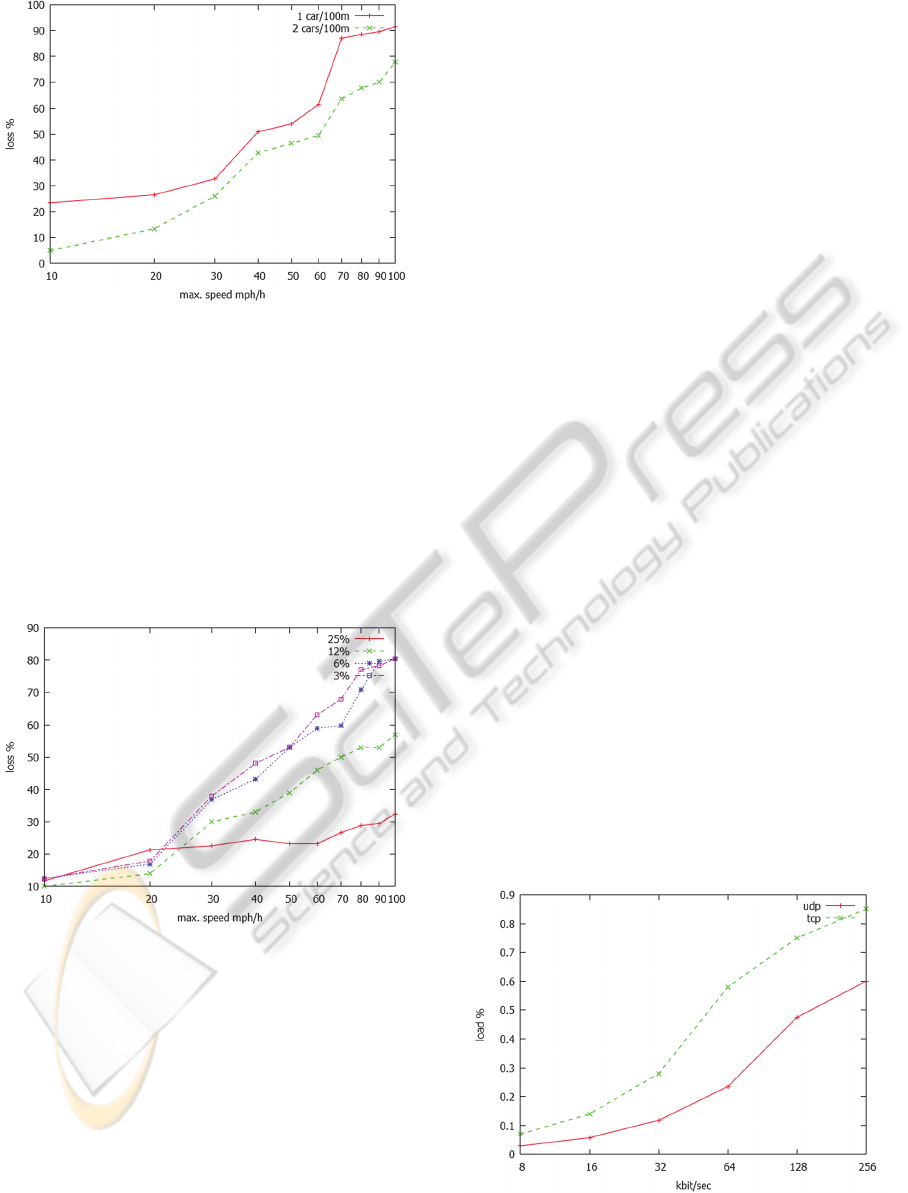
Figure 3: The dependence of the loss rate to deliver a
message from the emergency vehicle.
Among these vehicles there are vehicles equipped
with output interface to the cloud by means of LTE.
The percentage of vehicles equipped with LTE
modules is 3-25% (the parameter of the experiment).
In case of accident the vehicle initiates the
transmission of emergency messages addressed to:
any vehicle equipped with output interface to the
cloud, using transport mesh (802.11s). The
experiment evaluated the percentage of delivered
emergency messages.
Figure 4: The dependence of the messages delivered from
vehicle speed and their concentration.
Figure 4 shows the percentage of messages loss
at a rate of 2 vehicles a 100 meter long road when
the vehicles equipped with 802.11s transmitter and
the share of vehicles equipped with LTE modules is
the following: 25%, 12%, 6%, 3%.
Analysis of the obtained dependency leads to the
conclusion that the use of protocols for mesh
networking (802.11s) increases the reliability of
message delivery to nodes equipped with output
LTE interface to the multiservice cloud computing
environment. The number of the vehicles with such
interfaces should be at least 25%. Otherwise, more
than 50% of sent messages may be lost. It is
advisable to use a reconfigurable data transmission
routing platform which is capable of finding an
alternative path for messages and reach the cloud via
DSRC, Wi-Fi, or even others network infrastructure.
The third experiment illustrates the alternation
between the different protocols controlled by the
bandwidth variances. The operation of combined
mobile vehicles networks equipped with
multiprotocol device with two interfaces: LTE and
802.11p. In case of low LTE bandwidth usage, the
majority of messages are transmitting over LTE.
While when the LTE network is overloaded, the
high-priority emergency short messages are
transmitted over 802.11p channel as an alternative
way. This situation shows how a multiprotocol node
increases the ability of transferring messages using
802.11p channels at moments of peak loads on LTE
network.
This experiment consists of fragmenting an 800
meters road that contains 4 turns at 90 degrees. The
road has 4 lanes broken down by 2 on each side, on
the fragment of the road there are always 16 vehicles
(8 vehicles on each direction). Each vehicle is
equipped with LTE and 802.11p interfaces. On the
roadside there is 802.11p-receiver working as a
repeater. Main goal of experiment is to check the
ability to transmit short (1 KByte) emergency
messages from moving vehicles through 802.11p
transceiver to 802.11p access point. Transmission
speed of every node is changing from 8 Kbit/s to
256 Kbit/s. 802.11p network load is measured using
TCP and UDP transport layer protocols (figure 5).
The dependency shows that network utilization
reaches critical value at 256 Kbit/s transfer speed,
wherein UDP protocol shows 25 percent less
network utilization compared to TCP. It is worth
Figure 5: Dependency between 802.11p network load and
messages transmission speed.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
560

noting that the amount of undelivered messages
reaches 40 percent at 256 kbps transfer speed (based
on transport layer protocols statistics data of this
experiment). At transfer speeds of 128 Kbit/s or less
the amount of undelivered messages is insignificant;
messages are delivered up to 40 percent faster (in
average) over UDP compared to TCP.
Thus the multiprotocol interface improves
network characteristics in case of overloads at main
data transfer channels and in case of critical network
operation modes.
5 CONCLUSIONS
Current trends in information services establish new
challenges for developers of network protocols and
equipment. Promising areas include:
the development of universal reconfigurable
wireless devices that adapt to the specifications
of multi-protocol network nodes to ensure
compatibility standards for the transmission of
data in local and wide area networks;
the use of multi-protocol services, grouped
under an hpcc-platform that provides rapid
reconfiguration of virtual computing resources
with a goal to increasing the productivity of
cloud applications and the probability of delivery
of urgent messages;
development of methods to increase the
probability of emergency message delivery in
areas with unstable coverage zones. Duplication
of priority traffic via public wireless networks;
new 802.11x standard which can significantly
reduce the costs of mobile network development
while providing high-speed connectivity of
mobile devices over short distances and secure
access to multimedia services.
the use of alternative channels of
communication such as DSRC, leads to the
increased quality of communication at the
moment of message transmission when other
channels such as LTE and 802.11s are
unavailable. It follows that along the road
transceivers can be located providing a stable
zone of coverage.
ACKNOWLEDGEMENTS
This research was supported by a grant from the
Ford Motor Company.
REFERENCES
Gusikhin, 2011, Oleg Gusikhin, Erica Klampfl, Dimitar
Filev and Yifan Chen. Emotive Driver Advisor
System (EDAS). In J.A. Cetto, J.-L. Ferrier, J. Filipe
(eds.), Informatics in Control Automation and
Robotics, Lecture Notes in Electrical Engineering, v.
89, 2011, 21-36.
Zaborovsky, 2011, Vladimir Zaborovsky, Alexey
Lukashin, Sergey Kupreenko, Vladimir Mulukha.
Dynamic Access Control in Cloud Services.
Proceedings of The 2011 IEEE International
Conference on Systems, Man and Cybernetics (IEEE
SMC 2011), Anchorage, Alaska, USA, October 9-12,
2011, 1400-1406
Mulukha, 2011, Vladimir.Zaborovsky, Vladimir Mulukha.
Access Control in a Form of Active Queuing
Management in Congested Network Environment.
Proceedings of the Tenth International Conference on
Networks (ICN 2011; GlobeNet 2011), January 23-28,
2011 - St. Maarten, the Netherlands Antilles.
Published by IARIA, 2011, 12-17.
Msadaa, 2010, Chammakhi Msadaa, Ikbal; Cataldi,
Pasquale; Filali, Fethi. A Comparative Study between
802.11p and Mobile WiMAX-based V2I
Communication Networks. Next Generation Mobile
Applications, Services and Technologies (NGMAST),
2010 Fourth International Conference. 27-29 July
2010. Amman, 186 - 191.
Navarro, 2007, N. Coelho, N. Cabral, A. Pereira, A. Rocha
and A. Navarro. Mobile WiMAX Assessment in Sub-
urban Area to Support TV Broadcasting. IEEE ISCE
2007, 2007, Dallas, USA, 12-19.
Yoon, 2010, Hayoung Yoon. Collaborative streaming-
based media content sharing in WiFi-enabled home
networks. Consumer Electronics, IEEE Transactions
on (Volume:56, Issue: 4 ), 2193-2200.
Heller, 2006, Brandon Heller, The Quest for Wireless
Gigabit: Recent Advances in the Wireless Physical
Layer. [online] Available at: <http://www.cse.
wustl.edu/~jain/cse574-06/ftp/phy_trends.pdf>
[Accessed 15 March 2013].
Andreev, 2010, Kirill Andreev, Pavel Boyko. IEEE
802.11s Mesh Networking NS-3 Model.[online].
Available at: http://www.nsnam.org/workshops/wns3-
2010/dot11s.pdf [Accessed 10 March 2013].
Arbabi 2010, Highway mobility and vehicular ad-hoc
networks in ns-3. In Proceedings of the Winter
Simulation Conference (WSC '10), Björn Johansson,
Sanjay Jain, and Jairo Montoya-Torres (Eds.). Winter
Simulation Conference 2010, 2991-3003.
Gramaglia, 2011, Marco Gramaglia, Carlos J Bernardos
and Maria Calderon, Seamless Internet 3G and
Opportunistic WLAN Vehicular Connectivity.
[Online]. Available at: Http://Link.Springer.Com/
Content/Pdf/10.1186%2F1687-1499-2011-183.Pdf
[Accessed 10 March 2013].
HeterogeneousMultiprotocolVehicleControlsSystemsinCloudComputingEnvironment
561
