
A Lagrangian Relaxation based Heuristic for the Static Berth
Allocation Problem using the Cutting Plane Method
A. S. Simrin, N. N. Alkawaleet and A. H. Diabat
Engineering Systems and Management Program, Masdar Institute of Science and Technology, Abu Dhabi, U.A.E.
Keywords: Container Terminal, Linear Program, Static Berth Allocation, Lagrangian Relaxation, Cutting Plane
Method.
Abstract: One of the important seaside operations problems that received a lot of attention in the literature is the
assignment of quay space and service time to vessels that have to be unloaded and loaded at a terminal. This
problem is commonly referred to as the Berth Allocation Problem (BAP). Different approaches exist in the
literature for the berth allocation problem (BAP). Some of those approaches consider static arrival of
vessels, so called the static berth allocation problem (SBAP), while other approaches consider dynamic
arrival of vessels, called the dynamic berth allocation problem (DBAP). Approaches also differ in the layout
used for the quay. In this paper we study one of the SBAP models presented in literature. Since the SBAP is
a non-deterministic polynomial-time (NP) problem, we applied a Lagrangian Relaxation heuristic technique
with the application of cutting plane method on our problem. We coded the cutting plane method in Matlab,
and ran it on different instances of the problem. In most of the cases that we studied, our solution technique
converged to an optimal solution.
1 INTRODUCTION
We consider the problem of allocating berth space
for vessels in container terminals, which is known as
the berth allocation problem (BAP). The vital need
for efficient berth scheduling is stimulated by the
fact that the cost of constructing a berth is
considered very high compared to the costs of other
facilities in container terminals. Hence, berth is
considered as the most critical source for
determining the capacity of container terminals.
Planners in container terminals usually construct a
Berth schedule which shows the berthing position,
the arrival time, as well as the handling time of each
vessel to be serviced at that berth.
In berth scheduling problem, vessels arrive over
time at a port and the terminal operator assigns them
to berths for unloading and loading of containers
based on several factors and considerations: (i) the
discrete, continuous and hybrid berthing space, and
(ii) the static versus dynamic vessel arrivals. The
Static Berth Allocation Problem (SBAP) is the kind
of problems when it is assumed that vessels arrive
before berth allocation is planned, while in the
Dynamic Berth Allocation Problem (DBAP) vessels
can arrive before or after allocation plan is made.
In discrete layout, the quay is divided into
separated berths, and a berth can be assigned to only
one vessel at a time, while in continuous layout, it’s
assumed that the quay is not divided, and vessels can
berth at any location within the boundary of the
quay. Finally in the hybrid layout, the quay is
divided into berths as in discrete, but the difference
between the two is that small vessels can share one
berth and large vessels may be assigned more than
one berth.
Imai et al. (1997) studied the discrete SBAP
(Imai et al., 1997). Berth allocation was planned
with respect to minimum waiting and handling time
of the vessels in addition to the deviation between
the arrival order of vessels and the service order. It
was also assumed that the handling time of a vessel
depends on the berth i.e. a vessel has different
handling times on different berths. The problem is
then reduced to a classical assignment problem. Imai
et al. (2001) (Imai et al., 2001) presented another
formulation of discrete SBAP where planning was
done only with respect to waiting and handling time
of vessels. They presented a Lagrangian relaxation
based heuristic to solve the problem.
Hansen and Oguz (2003) (Hansen and Oguz,
2003) presented a more compact Mixed Integer
565
S. Simrin A., N. Alkawaleet N. and H. Diabat A..
A Lagrangian Relaxation based Heuristic for the Static Berth Allocation Problem using the Cutting Plane Method.
DOI: 10.5220/0004628105650569
In Proceedings of the 15th International Conference on Enterprise Information Systems (SSOS-2013), pages 565-569
ISBN: 978-989-8565-59-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Program (MIP) formulation for the SBAP. In 2006,
Lee et al. (Lee et al., 2006) presented a model for a
discrete SBAP considering the minimization of
waiting and handling time of vessels only. They
assumed that the handling time of a vessel depends
on its berthing position. Moreover, they assumed
that the handling time depends on the Quay Crane
(QC) operation schedule.
A Genetic Algorithm (GA) based heuristic was
also used by Imai et al. (2008b) (Imai et al., 2008)
for the minimization of the weighted number of
vessel rejections. A vessel is rejected if it cannot be
serviced without exceeding the due date, represented
by the maximum acceptable waiting time.
In this paper we are proposing Lagrangian
relaxation using the cutting plane method to the
SBAP model that was presented by Imai
et al.
(2001). In the following section we present Imai et
al. (2001) formulation, and in section 3, we discuss
the solution methodology used. Numerical results
are presented in section 4 and we finally finish with
conclusion in section 5.
2 FORMULATION
Imai et al. assumed that all berthed vessels are ready
to be serviced in a port when a berth schedule is
constructed. This means that any vessel-berth-order
assignment combination is considered feasible.
However, since we are considering discrete SBAP,
only one vessel can be serviced at a berth at a time.
Handling time of a vessel was assumed to be
deterministic and dependent on the berth, i.e. a
vessel may have different handling times if serviced
on different berths. This assumption is valid and
reasonable because in public berthing, the schedule
is usually determined before the arrival of the
vessels at the berth. At the same time, the containers
that are to be loaded onto the vessels may arrive
after the berth schedule is decided. Therefore, the
time it takes to load a container onto a vessel
depends on the berthing position of that vessel.
Consequently, the handling time of a vessel at a
specific berth, which is the total handling time of all
the containers, depends on the location of the berth
in the quay.
In addition, no technical, physical or draft
restrictions were considered in their study. In other
words, it is assumed that any vessel can be serviced
at any berth, without considering the length, width
or height of the vessel or other factors like depth of
water and location of a berth in the quay.
The objective function of the model is to
minimize the summation of waiting and handling
time of the vessels that are to be serviced at a port.
They assumed that waiting time of a vessel is the
time between the arrival of a vessel at the terminal
and the vessel service starting time. Handling time
was assumed to be the time a vessel spends at a
berth to be serviced.
Below is the formulation that was proposed by
Imai et al. for SBAP.
Objective function is:
Min
Tk1
C
S
A
x
∈∈∈
(1)
Subject to
∑∑
x
∈
1
∈
∀j ∈ V
(2)
x
∈
1 ∀i ∈ B,k ∈ O,
(3)
x
∈
0,1
∀i ∈ B, ∀j ∈ V,∀k ∈ O,
(4)
Where
i (=1,…,I) ∈B
Set of berths
j (=1,…,T) ∈V
Set of vessels
k (=1,…,T) ∈O
Set of service orders
S
Time when berth i becomes
idle for berth allocation
planning
A
Arrival time of vessel j
C
Handling time spent by
vessel j at berth i
x
1 if vessel j is serviced as the
kth vessel at berth i, and 0
otherwise
The objective (1) minimizes the sum of waiting and
handling time for every vessel. Constraint (2)
ensures that every vessel must be serviced.
Constraint (3) states that at each berth, at most one
vessel can be serviced at any time.
3 SOLUTION METHODOLOGY
3.1 Lagrangian Relaxation
Lagrangian relaxation heuristic techniques have
recently emerged as a practical approach for
complex assignment problems, as it can obtain near
optimal assignments with quantifiable quality in a
reasonable computation time for practical
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
566

assignment problems. The idea behind relaxation is
to relax “difficult constraints” and penalize them in
the objective function in order to get a problem that
can be solved ‘easily’. The Lagrangian problem
provides us with a lower bound (LB) (for a
minimization problem) of the optimal value of the
original problem.
In this paper we are applying Lagrangian
relaxation to the problem proposed by Imai which is
classified as a nondeterministic polynomial time
(NP) problem to the set of constraints (
3). This leads
to the following formulation:
Min
Tk1
C
S
A
x
∈∈∈
μ
x
1
∈∈
(5)
Subject to the following constraints
x
1
∈∈
∀j ∈ V,
(6)
x
ijk
∈
0,1
∀i∈B,j∈V,k∈O (7)
Where μ
is the Lagrangian multiplier for every
berth i in the order k. The above objective function
after Lagrangian relaxation can be written as:
Min
T‐k1
C
ij
S
i
‐A
j
μ
ik
x
ijk
‐μ
ik
k∈Oi∈Bk∈Oj∈Vi∈B
(8)
Excluding the term
∑∑
μ
∈∈
from the objective
function, we get the following sub-problem which
we denote SP:
SPMin
T‐k1
C
ij
S
i
‐A
j
μ
ik
x
ijk
k∈Oj∈Vi∈B
Subject to the constraints:
x
1
∈∈
∀j∈V,
(9)
x
∈
0,1
∀i ∈ B,j ∈ V,k ∈ O
(10)
Substituting values forμ
,
∀∈,∈,∈, and
solving the previous SP, we get a solution and an
objective function value of the SP which we call
Zsp. Thus, the lower bound of any problem is:
LB Zspμ
∈∈
3.2 Cutting Plane Method
Our goal now is to find the sharpest bound which
can be obtained by solving the following problem:
MaxLBZsp‐μ
ik
k∈Oi∈B
Subject to
μ
0,∀i ∈ B,∀k ∈ O
This problem is called the Lagrangian Dual. In order
to solve the Lagrangian Dual, we should compute
good multipliers (μ
). Thus, we use the cutting
plane method which is based on the idea that the SP
can be solved by generating all solutions that satisfy
constraints (5) and (6) in the form of
[x
111
h=1
,x
112
h=1
,…x
ijk
h=1
], where h∈H and H is the set
of all feasible solutions satisfying constraint (2) and
(4). In order to calculate good Lagrangian
multipliers, a general purpose procedure called the
sub-gradient method is sometimes used because it is
easy to implement. However, it does not prove
optimality (Fisher, 1985).
Instead, there is a smarter method to calculate
good Lagrangian multipliers called the cutting plane
method, which is more problem-specific. In this
paper, we are using the cutting plane method as
shown below.
Zsp can be written as:
Zspmin
T‐k1
C
ij
S
i
‐A
j
μ
k∈Oj∈V
x
ijk
h
i∈B
,∀h∈H
Hence, the best lower bound is:
MaxMin
T‐k1
C
ij
S
i
‐A
j
μ
ik
k∈Oj∈Vi∈B
μ
∈∈
,∀ ∈
Subject to constraint (8)
Let us define a variable θ where
θmin
T‐k1
C
ij
S
i
‐A
j
μ
ik
k∈Oj∈Vi∈B
x
ijk
h
∀h∈H
This implies:
θ
T‐k1
C
ij
S
i
‐A
j
μ
ik
k∈Oj∈Vi∈B
x
ijk
h
∀h∈H
This can be written as:
θ‐μ
ik
k∈Oi∈B
x
ijk
h
j∈V
T‐k1
C
ij
S
i
‐A
j
k∈Oj∈Vi∈B
x
ijk
h
∀h∈H
ALagrangianRelaxationbasedHeuristicfortheStaticBerthAllocationProblemusingtheCuttingPlaneMethod
567
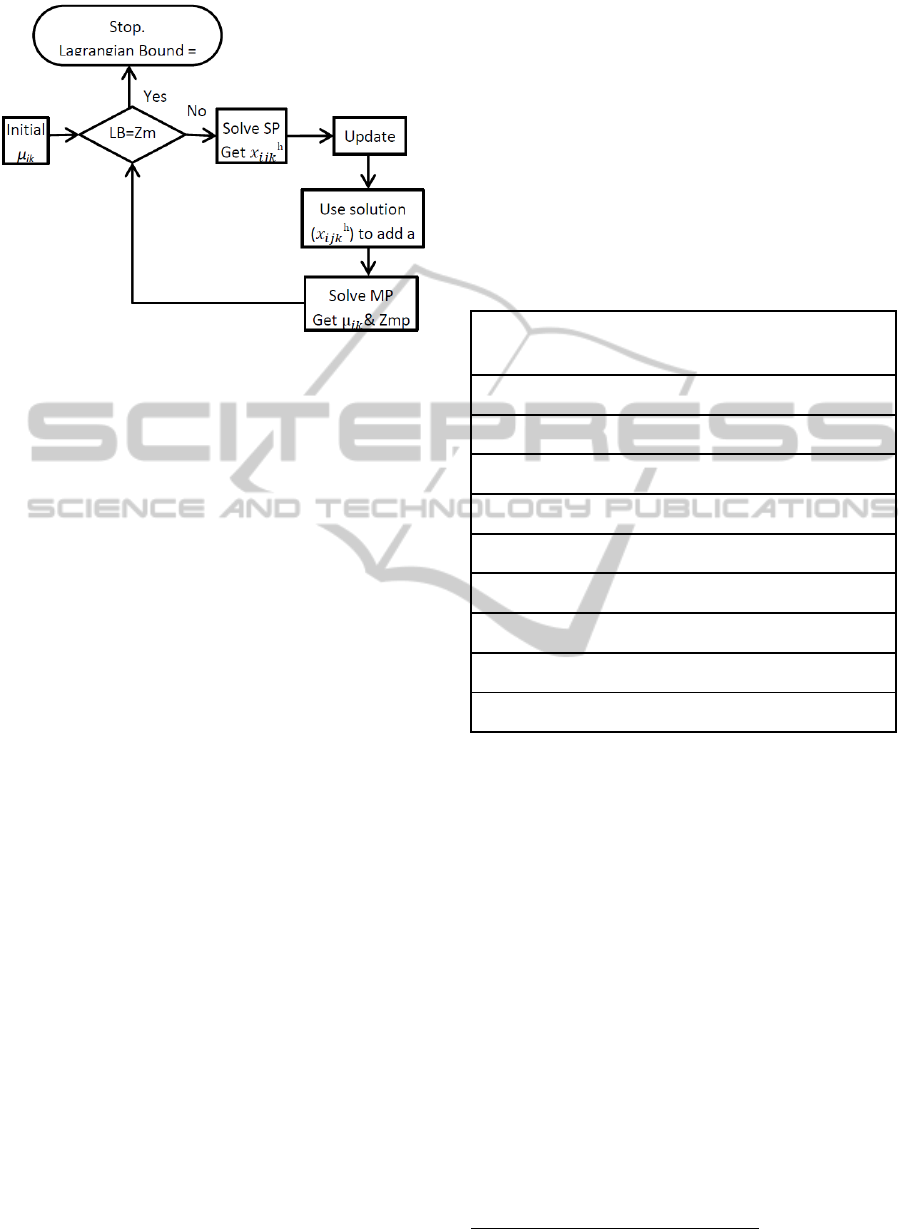
Figure 1: Cutting Plane Method Flowchart.
Accordingly, the Lagrangian Dual problem is:
[MP]
Maxθ
∑∑
μ
ikk∈Oi∈B
Subject to
θ‐μ
ik
k∈Oi∈B
x
ijk
h
j∈V
T‐k1
C
ij
S
i
‐A
j
k∈Oj∈Vi∈B
x
ijk
h
∀h∈H
The above problem is called the master problem,
denoted MP, and the solution of the problem is
denoted Zmp. The cutting plane method works as
the following: we start with values of μ
≥0. As long
as the lower bound does not equal Zmp, we solve
[SP] to get a solution (
h
) and a lower bound, the
new LB is the minimum of the previous LB and the
new one. Then we use this solution (
h
) to
generate a constraint to [MP]. Next, we solve the
[MP] to get solution of μ
and a Zmp. After that, we
return back to [SP] with the resulting μ
and solve it
again. The iteration between the [SP] and [MP]
continues till LB becomes equal to Zmp. This value
is called the Lagrangian bound which is the best
lower bound.
4 NUMERICAL EXPERIMENTS
The cutting plane method was coded in Matlab on a
Dell Latitude E6420, 2.60 Ghz machine. We applied
the method on the small problems (berths x
vessels): 3x5, 5x10, 7x20, 10x30, 15x35, 7x40,
13x40, 20x40 and 13x50 with values for the
parameters generated randomly yet reasonably. The
reason why we selected small problems is because
for those problems, solvers of General Algebraic
Modeling System (GAMS) could find a solution,
and this allows us to test the accuracy of our solution
method. However, in big problems, GAMS may not
be able to solve, or it may take a very long time to
converge, and that’s when our solution becomes the
most useful. For the previous problems, we recorded
the CPU computational time, number of iterations,
gap from the optimal value and the Lagrangian
bound after termination.
Table 1: Numerical Results of Lagrangian Relaxation.
Problem
Size(berths
x vessels)
Lagrangian
Bound
Gap
1
(%)
Iteration Time(s)
3x5 16 0.0 9 0.7
5x10 35 0.0 25 2.4
7x20 64 0.0 98 34.4
10x30 70 1.4 89 88
7x40 182 0.0 198 284.9
15x35 66 0.0 110 219.4
13x40 97 0.0 246 591.7
20x40 65 0.0 225 219.4
13x50 134 0.0 188 772.7
The numerical experiments show that the
Lagrangian relaxation gives precise results. In
figures 2.a, 2.b and 2.c we show the behavior of our
solution method and the convergence of LB and
Zmp for the problems 5-berthx10-vessel, 7-
berthx20-vessel and 15-berthx35-vessel
respectively. It was found that the optimal solution
of the relaxed version for each of these instances is
optimal to the original problem.
1
Gapiscalculatedbasedontheoptimalsolution
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
568
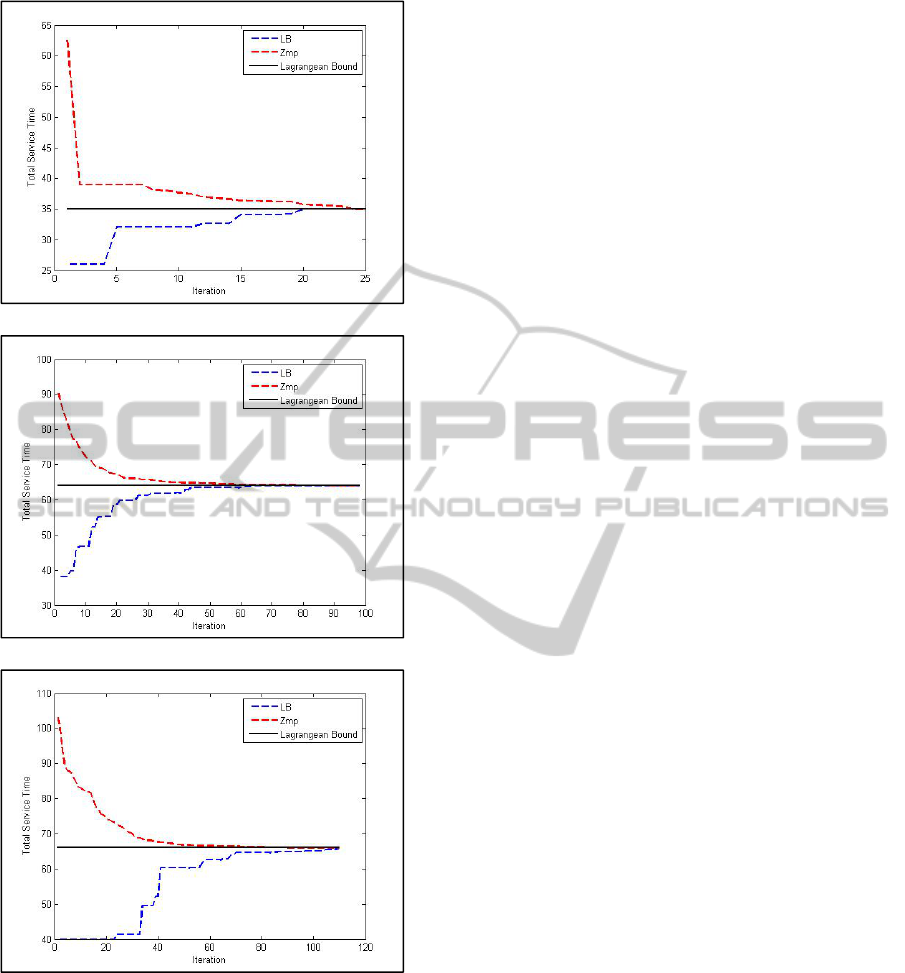
(a) 5-berth x 10-vessel.
(b) 7-berth x 20-vessel.
(c) 15-berth x 35-vessel.
Figure 2: Convergence of Sub-problems and Master
Problem.
The figures above shows the strength of the cutting
plane method as it ensures the convergence between
the sub-problem (SP) and the master problem (MP).
5 CONCLUSIONS
In this paper, we studied the Static Berth Allocation
Problem (SBAP) model proposed by Imai et. al
(2001). The SBAP cannot be solved in a polynomial
time, therefore we developed a Lagrangian
relaxation heuristic with the application of cutting
plane method to solve the problem.
The cutting plane method was implemented on 9
instances of the SBAP to solve the relaxed problems,
and it was found that in eight of the problems that
we tested, the method was able to reach the exact
optimal solution, while it gave a near optimal
solution with a very small gap in one case only.
REFERENCES
A. Imai, E. Nishimura., S. Papadimitriou, “The dynamic
berth allocation problem for a container port,”,
Transportation Research Part B 35 (4), pp. 401–417,
2001.
A. Imai, E. Nishimura, S. Papadimitriou, “Berthing ships
at a multi-user container terminal with a limited quay
capacity,” Transportation Research Part E 44 (1), pp.
136–151, 2008.
A. Imai, K. Nagaiwa, C. W. Tat, “Efficient planning of
berth allocation for container terminals in Asia,”
Journal of Advanced Transportation 31(1), pp. 75–94,
1997.
P. Hansen, C. Oguz, “A note on formulations of static and
dynamic berth allocation problems,” Les Cahiers du
GERAD 30, pp. 1–17, 2003.
D.-H. Lee, L. Song, H. Wang, “Bilevel programming
model and solutions of berth allocation and quay crane
scheduling.” in Proceedings of 85th Annual Meeting
of Transportation Research Board (CD-ROM). Annual
Meeting of Transportation Research Board.
Washington DC, 2006.
C. Bierwirth, F. Meisel, “A survey of berth allocation and
quay crane scheduling problems in container
terminals,” European Journal of Operational Research
202 (2010) pp. 615–627, 2009.
M. Fisher, “An Applications Oriented Guide to
Lagrangian Relaxation”, Interfaces vol 15 No 2 pp. 10-
21 (1985).
ALagrangianRelaxationbasedHeuristicfortheStaticBerthAllocationProblemusingtheCuttingPlaneMethod
569
