
Identification of Fuzzy Measures for Machinery Fault Diagnosis
Masahiro Tsunoyama
1
, Yuki Imai
1
, Hayato Hori
2
, Hirokazu Jinno
2
,
Masayuki Ogawa
2
and Tatsuo Sato
2
1
Niigata Institute of Technology, 1719 Fujihashi, Kashiwazaki, Niigata 945-1195, Japan
2
Flowserve Japan Co.,Ltd. 1-32 Shinbashi, Kashiwazaki, Niigata 945-0056, Japan
Keywords: Fuzzy Measure, Fuzzy Integral, Fault Diagnosis, Vibration Diagnosis.
Abstract: This paper proposes an identification method of fuzzy measure for fault diagnosis of rotating machineries
using vibration spectra method. The membership degrees for spectra in fuzzy set composed of vibration
spectra are obtained from the optimized membership functions. The fuzzy measure is identified by the
proposed method using the partial correlation coefficients between two spectra and the weight of each
spectrum given by skilled engineers. The possibility of faults are determined by the fuzzy integral that is made
by using the membership degrees and fuzzy measures for spectra. This paper also evaluates the method using
field data.
1 INTRODUCTION
Diagnosis of faults in rotating machineries are made
by applying prior knowledge in conjunction with
diagnostic analysis techniques of diagnosing
engineers. The need for diagnosing rotating
machineries is rising due to the increased use of
them in highly reliable systems such as aircrafts and
nuclear power plants. Moreover, due to the increase
of condition based maintenance (CBM) for highly
dependable systems and for cost effective
maintenance, many highly skilled engineers are
required to make accurate diagnoses (Chen et al.,
2002). However, it is difficult to satisfy the current
need of skilled engineers because the requisite
training is lengthy and very expensive.
Several diagnostic systems for rotating
machineries have been developed to satisfy this need
(Liu et al., 2007). Some of them use fuzzy measures
and fuzzy integrals to encompass the existing
knowledge of skilled engineers (Marinai and Singh,
2006). However, they still have several problems,
such as difficulty in isolating faults generating
similar vibration spectra.
This paper proposes an identification method of
fuzzy measures using partial correlation coefficients
of spectra used for fault diagnosis. The possibility of
faults is determined by the fuzzy integral using the
membership degree of spectra and fuzzy measure of
the set of spectra. The membership degrees are
obtained by the optimized membership functions
(Tsunoyama et al., 2010; Tsunoyama et al, 2012),
and fuzzy measures are identified by the partial
correlation coefficients of spectra and the weight of
each spectrum given by skilled engineers.
This paper is organized as follows. The vibration
spectra for faults, and fuzzy measure and fuzzy
integral are described in Section 2. The
identification method of fuzzy measure and variation
of possibility are explained in Section 3. A sample
diagnosis and evaluation of the proposed method are
provided in Section 4. Our conclusions are presented
in Section 5.
2 FAULT DIAGNOSIS
OF ROTATING MACHINERIES
2.1 Faults and Vibration Spectra
Several kinds of faults occur in rotating machineries
including abnormal vibration, oil or water leaks, and
abnormal temperature. The proposed method
diagnoses faults that produce abnormal vibration
since a large number of faults in rotating
machineries are accompanied by vibration.
However, the presence of vibration is not necessarily
indicative of a failure mode when the vibration
power is low. The power level required for
machinery failure is specified by ISO 2372. The
273
Tsunoyama M., Imai Y., Hori H., Jinno H., Ogawa M. and Sato T..
Identification of Fuzzy Measures for Machinery Fault Diagnosis.
DOI: 10.5220/0004629202730278
In Proceedings of the 5th International Joint Conference on Computational Intelligence (FCTA-2013), pages 273-278
ISBN: 978-989-8565-77-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
proposed method diagnoses faults generating
vibrations larger than this level.
The vibration spectra vary depending on the type
of fault. The vibration spectra method employed
analyzes vibration at six locations specified by
ISO2372 in a machinery using FFT (Fast Fourier
Transform) and diagnoses faults using the spectra.
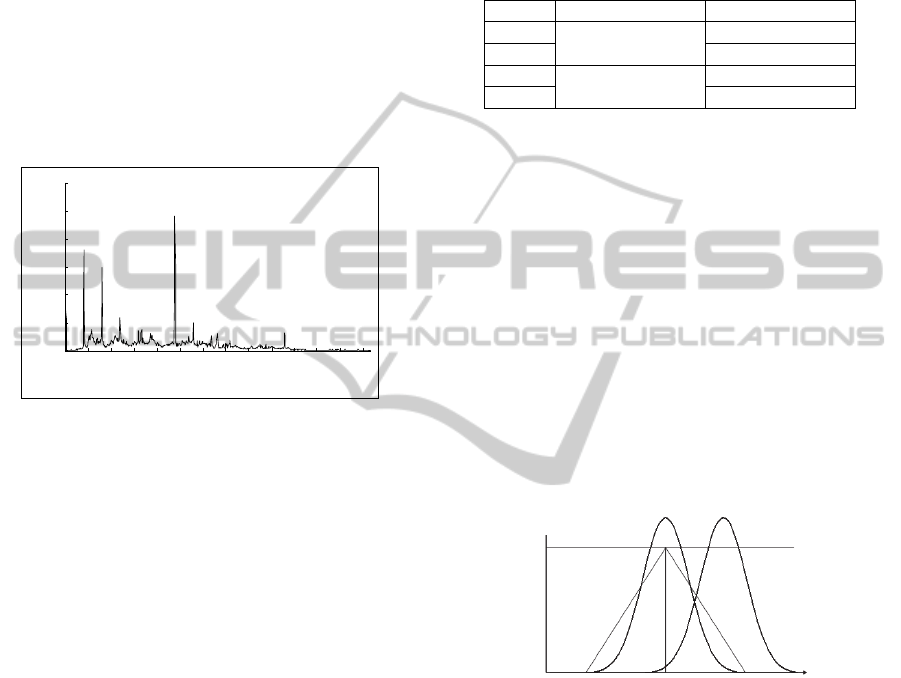
An example of spectra for a faulty machinery is
shown in Figure 1. In this case, engineers diagnose
that the fault might be imbalance because the
spectrum of fundamental frequency (60Hz) is high,
the second harmonics (120Hz) is rather high, and
more than third harmonics are very high from the
figure.
Figure 1: Vibration frequency spectra.
2.2 Fault Diagnosis
2.2.1 Fuzzy Set of Spectra and Membership
Functions
In the fault diagnosis, the possibility of forty three
different faults such as imbalance, misalignment,
looseness and so on are calculated using the
vibration spectra collected from a faulty machinery,
and membership degree and weight of each
spectrum.
The fuzzy set of spectra
A
~
is represented by
Eq.(1). The set is composed of vibration spectra and
their membership degrees. The set
X
is the set of
whole spectra used for calculating the possibility of
a fault.
n
i
ii
sshA
1
/)(
~
}.,{
21 n
s,ssX
(1)
where
)1)(0(),(
ii
shsh
is the membership degree
of spectrum
i
s
for a fault.
The intensity of spectra vary depending on the
installation of the machinery or degree of damage by
the fault, and its probability distribution can be
approximated by the normal probability distribution.
We optimize membership functions based on the
statistical properties of spectra (Tsunoyama et al.,
2010).
In fault diagnosis, diagnosed results are
classified into four cases (Table 1).
Table 1: Diagnosed Results.
Case Cause of fault Diagnosed result
1
α
Not α
2 α
3
β
α
4 Not α
When the possibility of fault
is calculated, the
possibility for Cases 2 should be maximum and the
possibility for Case 3 should be minimum, since
Case 2 is correct but Case 3 is not. Moreover, Cases
1 and 2 are exclusive, as are Cases 3 and 4.
Therefore, the membership function can be
optimized by maximizing the mean value of the
membership degree for Case 2 and minimizing that
for Case 3. We call
and
are a target fault and
non-target faults, respectively.
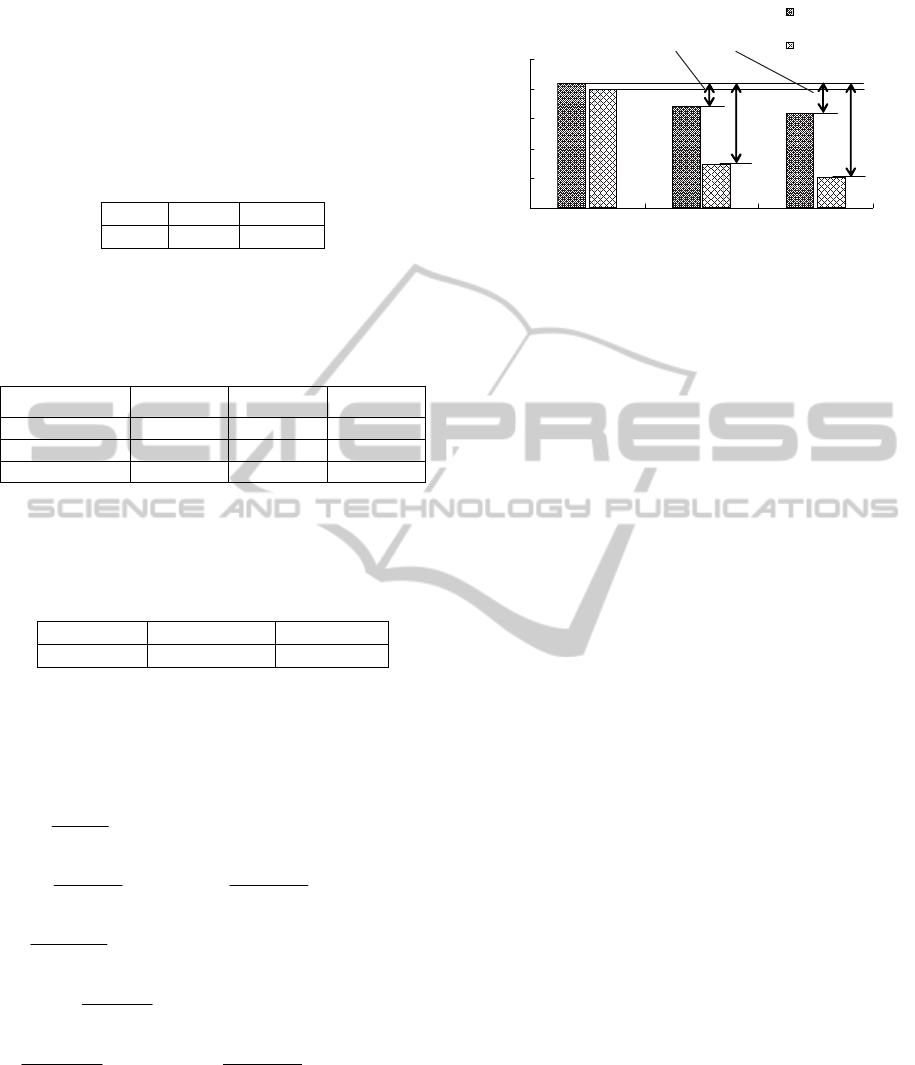
Figure 2 shows a triangular membership function
)(xh for a spectrum for diagnosing fault
, and
probability density function
)(xf
( )(xf
) for
intensity of the spectrum when fault
(
) occurs.
Figure 2: Membership function and probability density
functions.
The integral of the probability distribution function
}),{(),(
axF
a
and the membership function
)(xh for fault
gives the average membership
degree for fault
. The optimization of the
membership function for fault
is performed by
maximizing the average membership degrees for
Case 2 and minimizing the average membership
degrees for Case 3. Eq. (2) shows the average
membership degrees for Case 2.
1
0
r
m
l
m
c
m
x
xf
xf
xh
Intensity of
spectrum
Probability,
Membershi
p
0
0.2
0.4
0.6
0.8
1
1.2
0 75 150 225 300 375 450 525 600 675 750 825 900 975
Frequency [Hz]
Level
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
274

(2)
Eq. (3) shows the average membership degree for
Case 3.
(3)
Membership functions can be optimized by
maximizing Eq. (2) and minimizing Eq. (3).
2.2.2 Fuzzy Measure and Fuzzy Integral
A fuzzy measure
g
is a set function on
X
satisfying
the following conditions:
]1,0[2:
X
g
(4)
0)()1(
gC
1)()2( XgC
)()()3( BgAgXBAC
The fuzzy measure can cope with the following
three interactions between the functions on sets A
and B depending on the additivity of fuzzy measures
(Wang and Klir,1992).
(I1) No interaction between A and B.
(I2) Positive synergy between A and B.
(I3) Negative synergy between A and B.
Several fuzzy integrals have been proposed such
as Sugeno’s and Choquet integrals(Grabisch 2000).
In this paper, the Choquet integral is used. The
Choquet integral of a non-negative function
h on
X
with respect to fuzzy measure
g
is defined:
)()]()([)()(
1
1 i
X
n
i
ii
AgshshdgshC
(5)
where
},,,{
1 niii
sssA
, 0)(
i
sh when i=0., and
the order of
)11(,
nish
i
is assumed to be
11
shshsh
nn
.
3 IDENTIFICATION OF FUZZY
MEASURES
3.1 Fuzzy Measure based on Partial
Correlation Coefficient
Several methods for identifying fuzzy measures
have been proposed (Wang and Klir, 1992).
However, they are difficult to apply to fault
diagnosis of rotating machinery, since several
parameters must be assigned experimentally before
identification or they are difficult to differentiate the
possibility of target fault from non-target faults. In
this paper, the fuzzy measure based on partial
correlation coefficients is defined. This fuzzy
measure is the extension of the fuzzy measure
defined by (Taya and Murofushi, 2006). In the
definition,
)1( niw
i
is called a weight of
spectrum
i
s .
0
(),1,
ii
iAA i
g
AinAX
(6)
Www
i
in
t
tA
i
1
1
in
r
in
rs
sr
sr
sr
A
ww
k
k
i
1
1
1
,
,
1
where coefficient
sr
k
,
is the absolute value of partial
correlation coefficient between spectra
r
s and
s
s
(Sipley, 2000). The set of weights of spectra are
represented as follows, and given by skilled
engineers.
n
wwwW ,,,
21
,
n
i
i
w
1
1
The membership degree of spectra are assumed to be
11
shshsh
nn
without loss of generality. The factor
0
is
determined from the following equation to satisfy
the condition (C2) of fuzzy measure shown in 2.2.2.
1
,
10
111
,
1
1
nnn
rs
irs
irsr
rs
k
gA w w w
k
Thus the factor is given by the following equation.
1
11
,
,
0
1
1
1
n
r
n
rs
sr
sr
sr
ww
k
k
(7)
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
22
22
22
22
2
11
2
2
11
2
r
c
cr
cl
cl
r
l
m
m
cr
mm
cr
r
mm
lc
mm
lc
l
m
m
ee
mm
ee
mm
m
ee
mm
ee
mm
m
xdFxh
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
22
22
22
22
2
11
2
2
11
2
rc
cr
cl
cl
r
l
mm
cr
mm
cr
r
mm
lc
mm
lc
l
m
m
ee
mm
ee
mm
m
ee
mm
ee
mm
m
xdFxh
IdentificationofFuzzyMeasuresforMachineryFaultDiagnosis
275

3.2 Fuzzy Integral and Variation
of Possibilities
Fuzzy integral defined by Eq.(5) can be rewritten by
Eq.(8) when fuzzy measure is additive, since every
partial correlation coefficient is zero and the fuzzy
measure
)(
i
Ag is given by Eq.(9).
n
i
ii
X
shwdgshC
1
(8)
),1(0
,
nsrk
sr
)
1
0
1
(),1
ii
ni
iAA t
t
g
Awin
(9)
1
0
0
i
A
The above fuzzy integral is called a weighted
average and has been commonly used for calculating
the possibility of faults in fault diagnosis.
When fuzzy measure is not additive, fuzzy
integral is represented by the following equation by
substituting Eq.(7) to Eq.(6).
1
11 1
1
121
2
1
,
0
21
,
()
()(( ) ( )) () ( )
() ( ( ))
1
n
ii ni n
i
X
n
ini ni n
i
ni
ij
ii ij
ij
ij
Chsdg hs hs gA hs gA
hs gA gA hs gA
k
hs w w w
k
(10)
In fault diagnosis, we can distinguish faults correctly
when possibility of target fault(Case 2 in 2.2.1) is
higher than the possibilities of non-target faults(Case
3 in 2.2.1). In order to evaluate the proposed fuzzy
measure, we compare the difference of possibilities
between target fault and non-target faults. The
difference is obtained from the variation of fuzzy
integral when membership degree of spectra changes.
The partial differential of the fuzzy integral with
respect to membership degree
)(
i
sh of spectrum
i
s is
given by the following equation when fuzzy measure
is additive.
i
i
X
w
sh
dgshC
(11)
The total variation of fuzzy integral is given by the
following equation from the above partial
differential.
1
22
1
nn
X
i
ii
i
Chsdg
ww
hs
(12)
On the other hand, when fuzzy measure is not
additive, the partial differential is given by the
following equation.
1
,
1
,
1
,
11
,
1
1
1
i
ij
iij
j
ij
X
nn
rs
i
rs
rsr
rs
k
www
Chsdg
k
k
hs
ww
k
(13)
Thus the total variation is given by the following
equation.
2
1
,
21
,
1
,
11
,
1
,
1
21
,
1
,
11
,
1
1
1
1
1
1
1
n
X
i
i
ni
ij
iij
ij
ij
nn
rs
rs
rsr
rs
ni
ij
ij
ij
ij
nn
rs
rs
rsr
rs
Chsdg
hs
k
www
k
k
ww
k
k
www
k
k
ww
k
(14)
We evaluate the proposed fuzzy measure by
comparing the above two total variations. The ratio
of the above two variations is given by the following
equation and is called the ratio of improvement.
1
,
21
1,
1
,
11
,
1
1
11
1
1
ni
ij
ij
ij
ij
nn
rs
rs
rsr
rs
k
ww
wk
k
ww
k
(15)
The ratio of improvement shows that when proposed
fuzzy measure is used, we can expect K times larger
difference of possibilities between target fault (Case
2) and non-target faults (Case 3) than weighted
average is used.
4 EXAMPLE OF DIAGNOSIS
In this example, we compare the possibility of
looseness fault (target fault) with the possibilities of
imbalance and misalignment faults (non-target
1
11
,
,
2
1
1
,
,
1
1
2
2
1
1
1
1
1
1
n
r
n
rs
sr
sr
sr
n
i
i
j
ji
ji
ji
n
i
i
n
i
i
X
ww
k
k
ww
k
k
w
w
w
sh
dgshC
K
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
276
faults) using field data.
The spectra used to diagnose looseness fault are
,,
21 NN
ss and
MN
s
3
, where 1N, 2N, and 3MN are
fundamental frequency, second harmonics and over
third harmonics, respectively. The weights of spectra
given by skilled engineers are shown in Table 2.
Table 2: Weights of spectra.
N
w
1
N
w
2
MN
w
3
0.6 0.2 0.2
The membership degrees of spectra of field data for
three faults obtained from the optimized
membership functions are shown in Table 3.
Table 3: Membership degrees of spectra.
Fault
)(
1N
sh )(
2 N
sh )(
3MN
sh
Looseness 0.864 0.809 0.790
Imbalance 0.839 0.810 0.084
Misalignment 0.875 0.534 0.029
The partial correlation coefficients between two
spectra of field data for looseness fault are shown in
Table 4.
Table 4: Partial correlation coefficients.
N
N
k
2
,
1
MN
N
k
3
,
1
MN
N
k
3
,
2
0.572 0.843 0.330
The ratio of improvement given by Eq.(15) is
obtained as follows:
321
/)1(
K
(16)
Where
1
1
1
1
N
w
1,2 2,3
212 23
1,2 2,3
1,3
13
1,3
() ( )
11
()
1
NN NMN
NN NMN
NN NMN
NMN
NMN
NMN
kk
ww ww
kk
k
ww
k
1,2
312
1,2
2,3 1,3
23 13
2,3 1,3
1()
1
() ()
11
NN
NN
NN
NMN NMN
NMN NMN
NMN NMN
k
ww
k
kk
ww ww
kk
The ratio is calculated as
2.27K
by using the
values in the above tables.
The possibilities for field data obtained from the
fuzzy integral and from weighted average are shown
in the following figure.
0.0
0.2
0.4
0.6
0.8
1.0
Looseness Imbalance Misalignment
Possibility
Weighted
average
Fuzzy meas ure
and integral
Figure 3: Possibility of faults.
From the figure, we can see that the ratio of
improvement (
1112
/ dd ) is 3.25 when imbalance
data is used, and the ratio (
2122
/ dd
) is 2.97 when
misalignment data is used. These values are larger
than that of the ratio of improvement given by
Eq.(16). We can say that the possibility of target
fault (Looseness) is more differentiated than that of
non-target fault (Imbalance and Misalignment).
5 CONCLUSIONS
Herein, an identification method of fuzzy measure
for diagnosing faults in rotating machinery is
proposed. The fuzzy measures are determined by
using partial correlation coefficients between
vibration spectra and the weights of spectra given by
skilled engineers.
The fuzzy measure is evaluated by comparing
the possibility obtained by using the proposed fuzzy
measure and the possibility obtained by using
weighted average. The ratio of improvement K is
introduced to compare the difference of the above
two possibilities, and the equation for K is derived
using the partial differentials of fuzzy integral.
The evaluation is also made using field data. The
results show that the ratio of improvement obtained
from field data are around three and higher than the
value obtained from the equation in the paper.
In future work, we will improve the accuracy of
the ratio of improvement, and apply this method to
other fault diagnoses and evaluate the method using
extensive field data.
REFERENCES
Wang, Z. and Klir, G. J., 1992. Fuzzy Measure Theory,
Plenum Press.
Sipley, B., 2000. Cause and correlation in Biology.
d
11
d
21
d
22
d
12
IdentificationofFuzzyMeasuresforMachineryFaultDiagnosis
277

Cambridge University Press.
Grabisch, M. , Murofushi, T. and Sugeno, M., 2000.
Fuzzy Measures and Integrals : Theory and
Applications, Springer.
Chen, P., Feng,F. and Toyoda, T., 2002. Sequential
Method for Plant Machinery by Statistical Tests and
Possibility Theory, REAJ, vol. 24, No. 4, pp. 331-322.
Marinai , L., and Singh, R., 2006. A Fuzzy Logic
Approach to Gas Path Diagnostics in Aero-engines,
Computational Intelligence in Fault Diagnosis,
Springer.
Taya, M. and Murofushi, T., 2006. Fuzzy measure
identification for bootstrapped Choquet integral model
in multicriteria decision making. International
Conference on Soft Computing and Intelligent Systems,
and International Symposium on advanced Intelligent
Systems 2006, pp.1402-1407, Japan.
Liu, X., Ma, L. and Mathew, J., 2007. Rotating machinery
fault diagnosis on fuzzy data fusion techniques, 2nd
World Congress on Engineering Asset Management
and the 4th International Conference on Condition
Monitoring, pp. 1309-1318, Harrogate England.
Tsunoyama, M., Masumori, K., Jinno, H., Ogawa M. and
Sato, T., 2010. An Application of Fuzzy Measure and
Integral for Diagnosis of Rotating Machinery Faults,
ICFC 2010, International Conference on Fuzzy
Computation, pp. 120-124, Spain.
Tsunoyama, Imai, Y., K., Jinno, H., Ogawa M. and Sato,
T., 2012. An Application of Fuzzy Measure and
Integral to Diagnosis Utilizing Knowledge of Skilled
Engineers, PRDC 2012, Pacific Rim Dependable
Computing, Japan.
IJCCI2013-InternationalJointConferenceonComputationalIntelligence
278
