
A New Vehicle Detection Method for Intelligent Transport
Systems based on Scene-Specific Sliding Windows
SeungJong Noh
1
, Moongu Jeon
1
and Daeyoung Shim
2
1
School of Information and Communication, Gwangju Institute of Science and Technology,
Cheomdangwagi-ro, Gwangju, Republic of Korea
2
Department of Architecture, Kwandong University, Gangneung City, Republic of Korea
Keywords:
Intelligent Transport System, Vehicle Detection, Sliding Windows Technique.
Abstract:
This paper presents a powerful vehicle detection technique employing a novel scene-specific sliding windows
strategy. Unlike conventional approaches focusing on only appearance characteristics of vehicles, the proposed
detection method also utilizes actually observable size-patterns of vehicles in a road. In our work, good data
to train the size-patterns, i.e., size information of non-interacting moving-blobs are first collected based on the
developed blob-level analysis technique. Then, a new region-wise sequential clustering algorithm is performed
to train and maintain the size-pattern model, which is utilized to deform shapes of the sliding windows scene-
specifically at each image position. All the proposed procedures operate full-automatically in real-time without
any assumptions, and allow us to achieve more accurate and computationally efficient detection of vehicles
in multiple scales and aspect-ratios. In the experiments on the real-time highway system, we found that
performance of the proposed method is excellent in the aspects of detection accuracy and processing time.
1 INTRODUCTION
Although considerable progress has been made in ob-
ject detection over last decade, real-time vehicle de-
tection in surveillance system still remains a great
challenging task. For this functionality to be utilized
in the practical intelligent transport systems (ITS), we
need to effectively handle the significant appearance
variability of vehicles. The appearance variability is
mainly caused by 1) severe intra-class variation, 2)
unconstrained multiple viewpoints and 3) diverse ve-
hicle subclasses such as sedan, truck, bus, etc. As
a solution for these issues, sliding window based ap-
proaches are the most widely used because of its su-
perior performance (VOC, 2007). In this technique,
detection is treated as localized classification, where
we apply a pre-trained classifier function to all image
regions and then find locally optimized locations as
detection results.
Numerous types of classifiers have been adopted
for more elaborate object-class detection. For in-
stance, boosted cascades of Harr-wavelet filters (Vi-
ola and Jones, 2001; Mikolajczyk et al., 2004; Tuzel
et al., 2007; Brubaker et al., 2008), support vector
machine with histogram of gradient features (Dalal,
2006; Dalal et al., 2006), and exemplar shape mod-
els (Stenger et al., 2006; Chum and Zisserman,
2007; Gavrila, 2007) were employed. Although these
classifiers can successfully model intra-class vari-
ation, they still suffer from unexpected viewpoint
changes (Su et al., 2009). To overcome this draw-
back, more sophisticated techniques were proposed
such as methods utilizing a set of classifiers for each
viewpoints (Thomas et al., 2006; Kushal et al., 2007;
Liebelt et al., 2008), and applying 3D model struc-
tures (Savarese and FeiFei, 2007; Yan et al., 2007;
Su et al., 2009). More recently, viewpoint-specified
classifiers using implicit hierarchical boosting (Per-
rotton et al., 2011), and using a deformable part-
based approach (Felzenszwalb et al., 2010) were pro-
posed. However, these approaches are not also suit-
able for ITS applications, because they require high-
resolution vehicle sub-images and high computational
costs (Feris et al., 2011b).
In order to better deal with challenges in real
road environments, Feris et al. proposed a detec-
tion method based on the scene-unique classier (Feris
et al., 2011a; Feris et al., 2011b). In their ap-
proach, because all training samples are collected per
camera-view semi-automatically, not only intra-class
variation and but also geometric viewpoint informa-
tion can be effectively handled. In addition, it over-
537
Noh S., Jeon M. and Shim D. (2013).
A New Vehicle Detection Method for Intelligent Transport Systems based on Scene-Specific Sliding Windows.
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics, pages 537-545
DOI: 10.5220/0004631505370545
Copyright
c
SciTePress
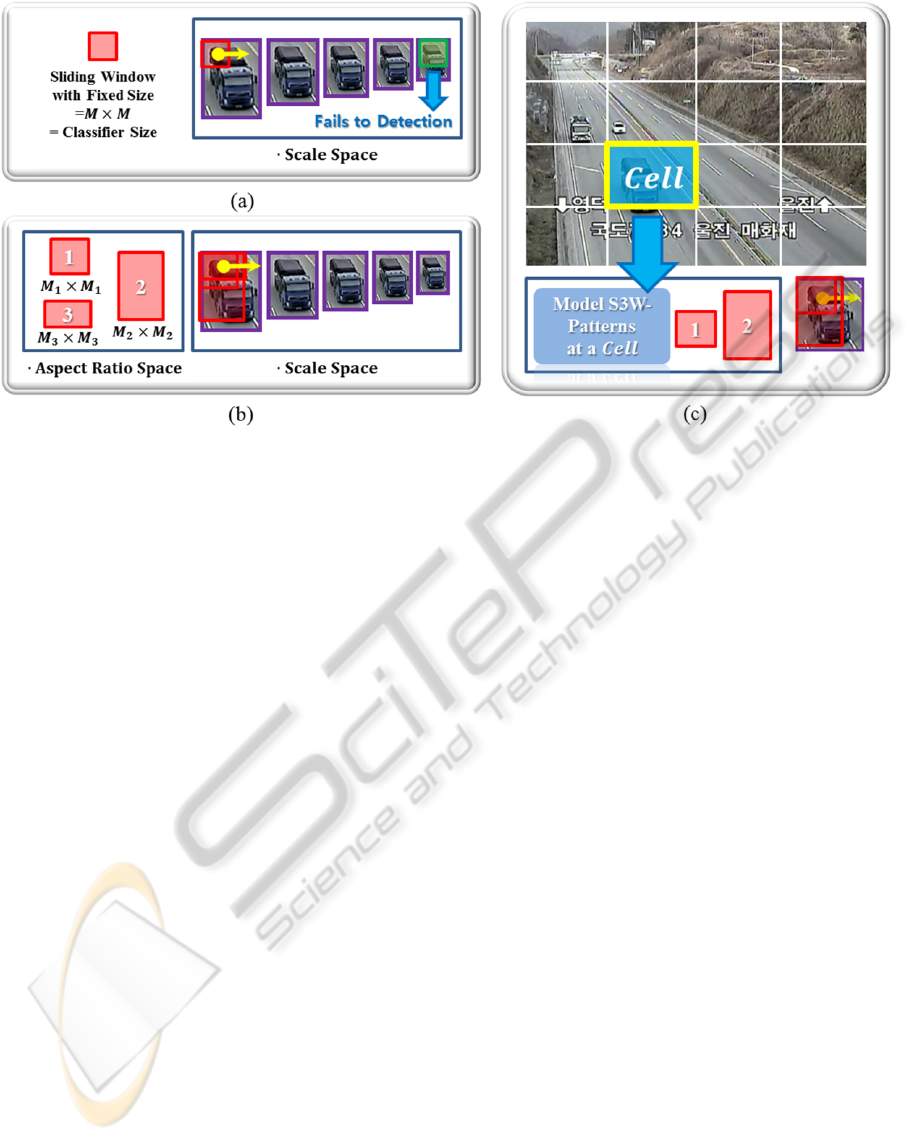
Figure 1: Figures for comparative explanation of the proposed and conventional sliding windows schemes: (a) The standard
approach. A sliding window represented by a red-box is scanned for all scale space images. A vehicle having a different
aspect-ratio from a classifier can cause inaccurate detection response as shown in a green box; (b) The exhaustive approach.
In this method, all numbered red-boxes are exhaustively investigated to address the aspect-ratio issue; (c) The proposed
scene-specific scheme. Only trained vehicle-size templates are taken into consideration for detection. White grids describe
cell structure employed for S3W-pattern modeling.
comes performance degradation due to various vehi-
cle subclasses by adopting a new search window de-
forming its shapes according to pre-defined aspect-
ratios (Feris et al., 2011b). However, this method also
has a limitation that user should manually adjust ap-
propriate aspect-ratio ranges whenever a surveillance
camera-scene is changed.
In our work, we propose a novel vehicle detec-
tion method based on the scene-specific sliding win-
dow, namely S3W. A key contribution of our work
is the effective pattern modelling with S3W provid-
ing three fundamental advantages. First, it enables a
system to learn and update actually observable vehi-
cle aspect-ratio information without any user-settings.
Based on this feature, Feris et al.’s method (Feris
et al., 2011b) can be easily extended so that appropri-
ate aspect-ratio ranges are automatically determined
depending on given scene contexts. Second, S3W-
based models allow us to achieve more compact oper-
ation. Unlike existing methods based on the conven-
tional sliding window (Viola and Jones, 2001; Breuel,
1992; Keysers et al., 2007; Lampert et al., 2008;
Blaschko and Lampert, 2008), the proposed detec-
tion method does not investigate detection responses
for all scale-spaces (Adelson et al., 1984) since the
constructed pattern models offer region-wised cues
for real vehicle scale estimation. Finally, the pro-
posed S3W-based image-scan strategy is greatly flex-
ible in choosing classifiers. Ours can be combined
with other conventional classifiers (Viola and Jones,
2001; Dalal, 2006; Stenger et al., 2006; Perrotton
et al., 2011; Felzenszwalb et al., 2010) without any as-
sumptions. Based on these advantages, the proposed
detection technique accomplishes more accurate and
computationally efficient performance under diverse
real traffic-monitoring environments.
The rest of the paper is organized as follows.
Section 2 describes employed classifier learning
methodologies, and Section 3 explains details of the
proposed vehicle detection procedures. Several ex-
perimental results are given to validate our approach
in Section 4, and concluding remarks are presented in
the last Section 5.
2 CLASSIFIER LEARNING
We employ the concept of the scene-unique classifier
based detection (Feris et al., 2011b), where all train-
ing samples are extracted from specific camera scenes
to effectively address intra-class variation and uncon-
strained viewpoints. To construct a training data set,
whenever a frame is captured, we first collect fore-
ground bounding-box images (Noh and Jeon, 2012)
and arbitrary sized background images. Then, col-
lected samples are normalized to have 48×48 size,
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
538

Figure 2: Figures to illustratively present overall procedures of the proposed detection method: (a) A flowchart of the proposed
S3W-based approach; (b) Background subtraction results. Violet regions and boxes indicate found foreground regions and
corresponding bounding boxes, respectively; (c) Three blob-level tracking histories. Each letter N implies that tracked blobs
are in the normal state; (d) Constructed S3W-pattern models after three Tracklets are collected. White grids represent applied
cell structure and colored boxes show actually trained vehicle size templates at each cell; (e) S3W-based vehicle detection
results. Violet, yellow and green boxes indicate foregrounds, initial detection responses and local optimized final detections,
respectively; (f) Four good tracking examplars for S3W-modeling. Red boxes represent actually inferred vehicle sizes by
selected Tracklet instances.
and then false positive samples are removed manu-
ally. In our work, these procedures are performed
for 10,000 frames resulting 200∼400 initial posi-
tive, 100∼150 pruned positive and 1,000∼1,500 neg-
ative samples. The final vehicle classifier is pro-
duced through the HOG-descriptor based Linear-
SVM (Dalal, 2006) in several minutes.
3 PROPOSED METHOD
Standard sliding window approaches have been cho-
sen for many years for accurate object detection (Vi-
ola and Jones, 2001; Dalal, 2006; Boykov et al., 2001;
Alexe and Ferrari, 2011). Here, a searching window
shape is kept constantly, and sub-image hypothesises
in all scale space images are considered as candidate
detections. However, this methodology cannot ensure
high detection accuracy because they do not consider
diverse vehicle aspect-ratio information sufficiently
(Figure1(a)). To overcome this drawback, a more ex-
haustive approach is proposed (Feris et al., 2011b),
in which detection responses in not only scale space
but also aspect-ratio space are exhaustively investi-
gated (Figure1(b)). Although this has been shown to
be quite effective in many applications, it still suffers
from two main disadvantages. First, it is not clear how
to set optimal aspect-ratio space. Because appropriate
aspect-ratio ranges should be determined by expert’s
experience manually, significant errors can be caused
if a camera-view is changed unexpectedly. Second,
it is computationally inefficient since classifications
should be performed at entire image positions for all
scales and aspect-ratios.
The main reason why scale and aspect-ratio space
have been adopted for detection is that most of meth-
ods focus on training only appearance features of a
target object class (Viola and Jones, 2001; Dalal,
2006; Stenger et al., 2006; Perrotton et al., 2011;
Felzenszwalb et al., 2010; Feris et al., 2011b). For in-
stance, in the Feris et al.’s work (Feris et al., 2011b),
the system should examine scale and aspect-ratio fac-
tors as many as possible during actual execution times
since size information implied in the training set is
completely lost in sample normalization procedure
to produce a more compact classifier. We address
this issue by proposing a new S3W-based image scan
strategy. Figure1(c) describes the fundamental con-
cept of the developed method. In our work, classifier
evaluations are performed only for several promis-
ing vehicle-size patterns inferred from contexts of the
given camera scene in real-time. Therefore the pro-
posed approach doesn’t require predefined scale and
aspect-ratio data.
Our system utilizes three types of scene-specific
data structures: 1) a scene-wised vehicle classifier,
2) a region-wised S3W-pattern model and 3) a pixel-
wised background model. The classifier is created
ANewVehicleDetectionMethodforIntelligentTransportSystemsbasedonScene-SpecificSlidingWindows
539
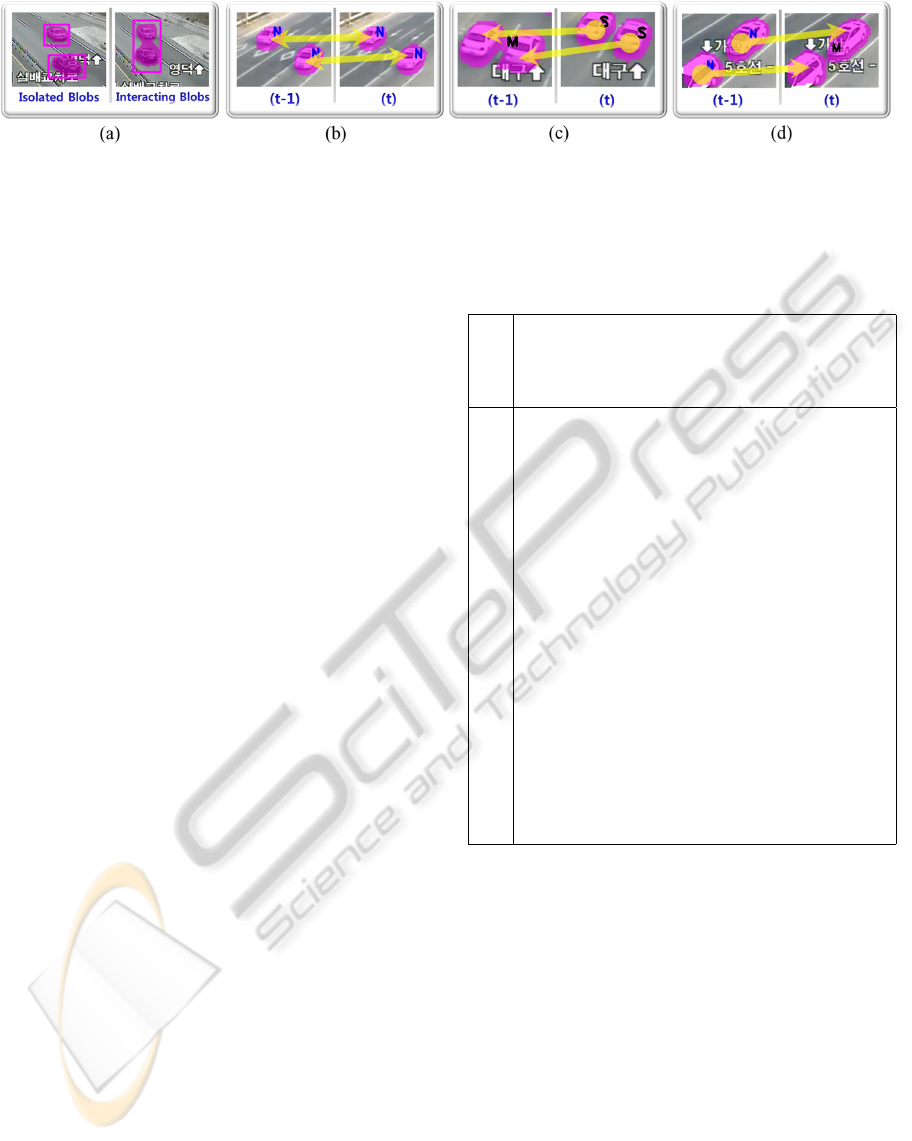
Figure 3: Figures for the blob-level tracking precesses: (a) Examples of isolated and interacting moving blobs in a scene. We
collect only isolated blobs for the subsequent S3W-pattern modeling because bounding boxes for merged blobs cannot provide
accurate vehicle size information as shown in ’Interacting Blobs’ figure; (b), (c) and (d) describe blob-matching results in the
isolation, split and merging state, respectively. Yellow arrows show matching directions, and letters N, M and S imply that
corresponding blobs are in N
state
, M
state
and S
state
.
based on the semi-automated learning methodology
offline (Feris et al., 2011b), and the background
model is generated when a video stream is started
based on multiple-cues during 200 initial frames (Noh
and Jeon, 2012). On the other hand, the S3W-model
is constructed and maintained based on the proposed
modeling method in real-time.
In Figure2(a), we give an overview of the pro-
posed detection framework. Whenever a frame is
captured after the background modeling stage, the
proposed system first creates a foreground mask in-
cluding all moving blobs in the scene (Figure2(b),
(Noh and Jeon, 2012)), and then carries out moving-
blob analysis to obtain good-cues to train the S3W-
model (Figure2(f), Subsection3.1). Next, we conduct
S3W-pattern modeling (Figure2(d), Subsection3.2)
and finally detect vehicles in multiple scales and
aspect-ratios through the constructed S3W-model
(Figure2(e), Subsection3.3).
3.1 Moving Blob Analysis
In this work, we focus on the fact that isolated
foreground blobs can provide useful information for
S3W-pattern modeling. For instance, widths and
height values of bounding boxes for isolated blobs
shown in Figure3(a) can be effectively utilized to
train observable vehicle sizes for a scene. However,
interacting blobs, such as blobs merging, occluding
each other or split into several parts should be ex-
cluded in the modeling stage because it causes inac-
curate size data as presented in Figure3(a).
We designed a practical blob-leveling tracking al-
gorithm described in Table1 to distinguish appropri-
ate blobs and inappropriate blobs for learning. For
more specific explanation, let a tracking history (see
Figure2(c)) be formulized by a 2-tuple Tracklet =<
AUX, ST >, where AUX implies a set of vector
aux
m
= (x
m
,y
m
,w
m
,h
m
) and ST indicates states of
Tracklets. Here, x
m
, y
m
, w
m
and h
m
means a x co-
ordinate, y coordinate, width and height of a bound-
ing box for a blob, respectively. The variable ST can
Table 1: Blob-Level Tracking Algorithm.
1 Input: Blob matching tables
2 • FOR and BACK
4 Output: Tracking histories at time t
5 • T H
t
= {Tracklet
(t,h)
|h = 1, . . . , NH
t
}
6 [History Update]
7 for i = 1,...,NF
t−1
8 for j = 1, . . . , NF
t
9 if FOR[i][ j] = T , BACK[i][ j] = T
10 · Get h involving aux for blob
(t−1,i)
11 · Add aux for blob(t, j) to Tracklet
h
12 · Set ST in Tracklet
h
to N
state
13 else
14 · NH
t
← NH
t
+ 1, h ← NH
t
15 · Create a new Tracklet
h
16 · Add aux for blob(t, j) to Tracklet
h
17 if FOR[i][ j] = T , BACK[i][ j] = F
18 · Set ST in Tracklet
h
to M
state
19 else if FOR[i][ j] = F, BACK[i][ j] = T
20 · Set ST in Tracklet
h
to S
state
21 else
22 · Set ST in Tracklet
h
to N
state
23 end for
24 end for
be set to normal (N
state
), split (S
state
) and merged
(M
state
) states.
In our work, each Tracklet is continuously up-
dated to identify condition of moving blobs until it
disappears from the scene. Because the purpose of
the proposed tracking technique is not to track ob-
ject robustly but to identify isolated blobs in a scene,
we give up to track moving blobs in merging or split-
ting events. Instead, a new Tracklet whose ST value
is M
state
or S
state
is generated (Table1). Actions of
moving blobs can be easily examined based on sim-
ple blob-matching procedures for sequential frames
(Table2). For instance, blobs at time t are backward
matched to blobs at time t − 1 in the splitting event
(Figure3(c)), blobs at time t − 1 are forward matched
to blobs at time t in the merging event (Figure3(d)),
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
540
Table 2: Blob-Matching Algorithm.
1 Input: Foreground sets at time t and t − 1
2 • F
t−1
= {blob
(t,i)
|i = 1, . . . , NF
t−1
}
3 • F
t
= {blob
(t,i)
|i = 1, . . . , NF
t
}
4 Output: Blob matching results
5 • Forward matching table: FOR
6 • Backward matching table: BACK
7 [Initialization]
8 for i = 1,...,NF
t−1
9 for j = 1, . . . , NF
t
10 · FOR[i][ j] ← F
11 · BACK[i][ j] ← F
12 end for
13 end for
14 [Blob Matching]
15 for i = 1,...,NF
t−1
16 for j = 1, . . . , NF
t
17 // Step1: Forward matching
18 if blob
(t−1,i)
is matched to blob
(t, j)
19 · FOR[i][ j] ← T
20 // Step2: Backward matching
21 if blob
(t, j)
is matched to blob
(t−1,i)
22 · BACK[i][ j] ← T
23 end for
24 end for
and blobs at time t − 1 and t are bilaterally matched if
they are isolated (Figure3(b)).
To perform the blob-matching method, we
first operate the classical connect component algo-
rithm (Dillencourt et al., 1992) on a given foreground
mask to label each moving region with blob
(t, j)
,
where t implies time that the input frame is captured
and j represents a blob index (Line1-3 in Table2).
Then, blob matching procedures are carried out to
produce result tables FOR and BACK (Line14-24 in
Table2). KLT feature-flow based approach (Fusier
et al., 2007) is employed to evaluate appearance sim-
ilarity between two blobs (Line18, 21 in Table2).
Next, blobs in F
t−1
are associated with blobs in F
t
based on the blob-level tracking algorithm given in
Table1, and finally Tracklets on a road are add, re-
moved or updated according to the corresponding
matching table entries (Line6-24 in Table1). These
procedures prevent inadequate Tracklets which con-
tain interacting blobs from becoming the normal state.
Tracklets with N
state
are selected as good examplars
to train the S3W-model when they are removed if the
following condition is satisfied:
movedDist ≥ min(W
img
,H
img
) × 0.08 (1)
where movedDist, W
img
and H
img
means a total moved
distance of a Tracklet, image width and image height,
respectively. In Figure1(f), we give several examples
of good Tracklet instances.
3.2 S3W-pattern Modeling
In the proposed method, the S3W-model is con-
structed and maintained based a cell-wised sequential
clustering algorithm as shown in Figure2(d), where
the cell is an employ grid structure for more compact
operation. Let (cx, cy) denotes a cell-coordinate in the
adopted grid-system, and W
cell
and H
cell
represents
the number of the cells in horizontal axis and vertical
axis of an image sequence, respectively. In addition,
assume that a S3W-pattern model(SPM) is defined as
a set of data-structure SP
(cx,cy)
= {cluster
k
(cx,cy)
|k =
1,...,NC
(cx,cy)
}, in which cluster
k
(cx,cy)
implies the
kth involved cluster and NC
(cx,cy)
means the number
of clusters. For each cluster, we continuously update
three statistics, i.e., mean vector, covariance matrix
and the maximum negative run-length(MNRL) (Kim
et al., 2004). The first two factors are applied to mea-
sure Mahalanobis distance(MD) (Mahalanobis and
Chandra, 1936) between an input sample and a clus-
ter (Line14 in Table3), and the final factor is utilized
to clear non-essential clusters.
For each aux
m
in a given Tracklet, we first
calculate its corresponding cell-coordinate (cx, cy)
(Line10-11 in Table3), and then perform the clus-
ter matching process to find the best-matched cluster
(Line12-15 in Table3). If there exists a matched clus-
ter, we update its statistics based on the input sample
(Line17-18 in Table3). Otherwise, we generate a new
cluster containing an input vector, an identity matrix
and a zero-value as the initial mean vector, covari-
ance matrix and MNRL value, respectively (Line19-
21 in Table3). Here, because an input sample s
m
is
defined as (w
m
,h
m
), mean vectors are also set to be
two-dimensional. Whenever 500 aux
m
instances are
trained, non-essential clusters whose MNRL is larger
than 500 × 0.1 are removed.
3.3 S3W-based Vehicle Detection
3.3.1 Initial Detection
To localize vehicles in unconstrained scales and
aspect-ratios, we deform a shape of the sliding win-
dow at each image position depending on scene-
context. We start more detailed explanation with
defining several notations. First, let ForeBox,
(bx,by) and (bx
in
,by
in
) means a foreground bounding
box, left-top coordinate of the ForeBox in an input
frame, left-top coordinate of a sliding window in the
ForeBox, respectively (Figure4). In addition, assume
that
w
k
(cx,cy)
,h
k
(cx,cy)
indicates a mean vector of the
k
th
cluster in a SP
(cx,cy)
(Line4 in Table3).
ANewVehicleDetectionMethodforIntelligentTransportSystemsbasedonScene-SpecificSlidingWindows
541
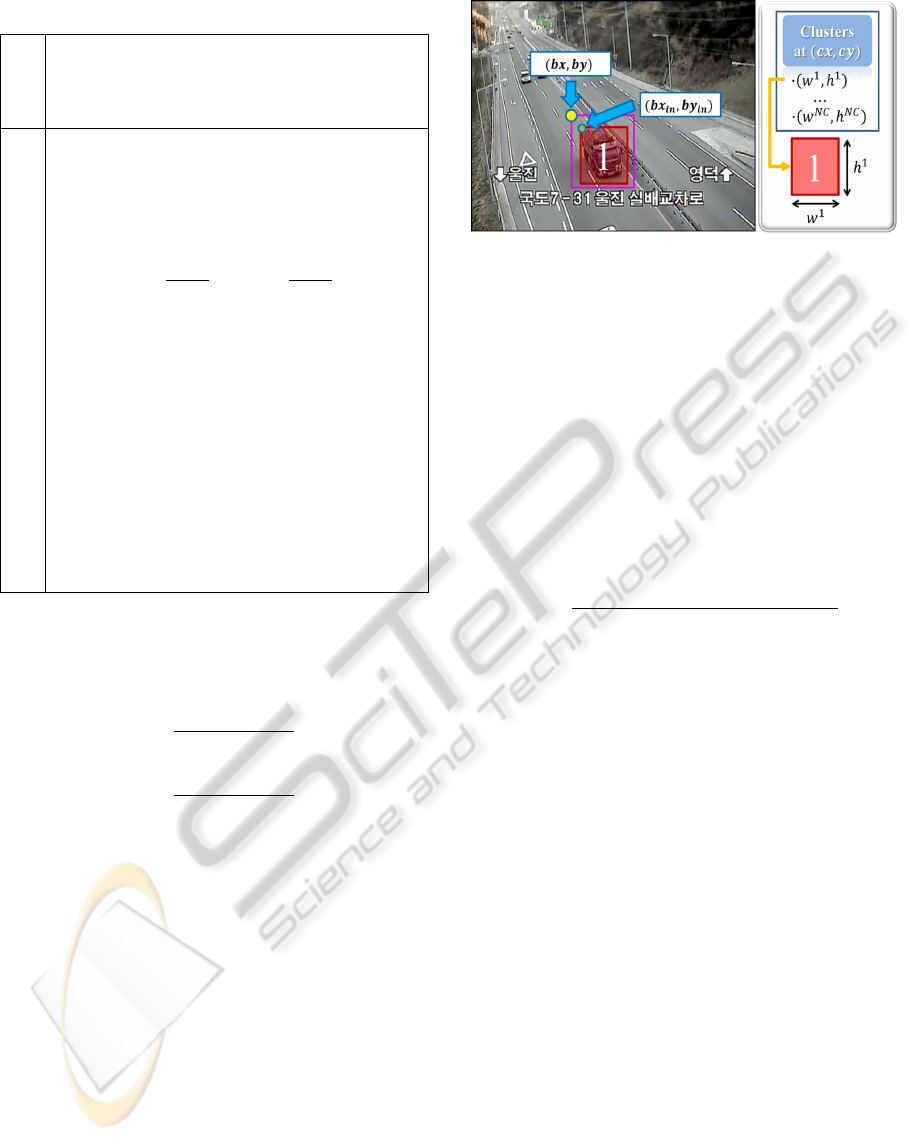
Table 3: S3W-Pattern Modeling.
1 Input: A set AUX in a verified Tracklet
2 • AUX = {aux
1
,...,aux
NA
}
3 Output: A cell-wised S3W-Pattern Model
4 • SPM = {SP
(cx,cy)
|(cx,cy) ∈ Image}
5 [Initialization]
6 • Cell size factor f
cell
← 10
7 • Cluster size factor f
cluster
← 15
8 [Cell-Wised Sequential Clustering]
9 for m = 1,...,NA
10 // Step1: Getting cell-coordinate for aux
m
11 · cx ←
x
m
f
cell
W
img
, cy ←
y
m
f
cell
H
img
12 // Step2: Cluster matching
13 · s
m
← (w
m
,h
m
), idx ← null
14 · id ← argmin
k
MD
cluster
k
(cx,cy)
,s
m
15 · matchDist ← MD(cluster
id
(cx,cy)
,s
m
)
16 // Step3: S3W-model Update
17 · if id 6= null, matchDist ≥ f
cluster
18 i) Update cluster
id
(cx,cy)
based on s
m
19 · else
20 i) NC
(cx,cy)
← NC
(cx,cy)
+ 1
21 ii) Generate a new cluster
NC
(cx,cy)
for s
m
22 end for
For each window coordinate (bx
in
,by
in
) in a fore-
ground bounding box, we first calculate the corre-
sponding cell coordinate (cx,cy) through the follow-
ing equations:
cx =
(bx
in
+ bx) f
cell
W
img
(2)
cy =
(by
in
+ by) f
cell
H
img
(3)
where f
cell
is the applied cell size factor in
Table3. Next, we produce subimages with size
(w
k
(cx,cy)
,h
k
(cx,cy)
) for all clusters in SP
(cx,cy)
. Each
subimage is resized to same size with the trained vehi-
cle classifier, and then classification is conducted. Ini-
tial detection responses shown in Figure2(e) are gen-
erated by performing these procedures for all possible
ForeBox positions. In this work, we represent a de-
tection response for a window whose location is (x,y)
and size is (w,h) as a 2-tuple R =< r, score >, where
r is a vector (x, y,w,h)
T
and score is corresponding
classification score.
3.3.2 Non-maximum Suppression
In general, sliding windows schemes cause unnec-
essary multiple overlapped detections. To overcome
this drawback, we employ Dalal’s non-maximum sup-
pression technique (Dalal, 2006). In the Dalal’s work,
Figure 4: Figures for the S3W-based detection: The violet
and red box represents a foreground bounding box and a
sliding window, respectively. (cx,cy) indicates a cell coor-
dinate for an image coordinate (bx + bx
in
,by + by
in
).
non-maximum suppression is treated as a mean-
shift algorithm based mode seeking problem. More
specifically, each initial detection response R
i
=<
r
i
,score
i
> (i = 1,...,M) is continuously moved at
each iteration n until it converges to the locally opti-
mized mode based on the following equations:
r
n+1
i
=
M
∑
i
w
i
(r
n
i
) · r
i
(4)
w
i
(r) =
t(score
i
)exp
− ED
2
(r, r
i
)/2
∑
M
i
t(score
i
)exp
− ED
2
(r, r
i
)/2
(5)
t(score) =
score if score ≥ 0
0 if score < 0
(6)
where, ED means Euclidean distance between two
vectors. Note that a 4 × 4 identity matrix is employed
as the bandwidth matrix because we don’t take any as-
sumptions on the vehicle size patterns. In Figure2(e),
we describe several examples of the local optimized
final detection results by green boxes.
4 EVALUATION
We have conducted systematic experiments on four
data sets produced from different view of fixed cam-
era scenes (Figure5(a) ). A set consists of 10,000
training and 5,000 test sequences captured under real-
road environments, and involves 50 ground-truth de-
tections located in randomly selected test sequences.
For each test scene, we first train a 48×48 size of ve-
hicle classifier using positive and negative samples
extracted from the training sequences offline. The
S3W-pattern modeling is operated during the first
10,000 test sequences, and then performance evalu-
ation is performed for the remaining 5,000 frames.
More details of the applied scene modeling processes
are given in Figure5(a).
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
542

To determine whether a detection is correct or not,
we utilized the following criteria:
True Detection if F
p
≥ 0
False Detection if F
p
< 0
(7)
where F
p
implies pixel-level F-score to quantitatively
measure quality of a detection response. We give the
definition of F
p
in the below equation:
F =
2T P
2T P + FN + FP
(8)
where T P, FP and FN are true positives, false
positives and false negative positives, respectively
(Figure5(b)). Based on these measures, true detec-
tion rate(T DR) and detection hit rate(DHR) for the
entire data sets were estimated. In addition, we also
calculated average detection quality(ADQ) for all true
hit detections to clearly demonstrate the superior per-
formance of the proposed S3W-based technique. The
final performance score(FPS) of detection algorithms
were defined as the harmonic mean of T DR, DHR and
ADQ.
We present qualitative and quantitative results on
the original sliding windows based approach (Viola
and Jones, 2001; Dalal, 2006) and the proposed de-
tection method in Figure5(c) and Figure5(d). For both
techniques, same implementation details were applied
except for classifier scan strategies. The exhaustive
scale and aspect-ratio space based approach (Feris
et al., 2011b) was excluded in our experiments be-
cause we considered only full-automatic sliding win-
dows schemes.
From the qualitative results, first we can see that
the proposed method achieves greatly high detec-
tion accuracy based on the scene-specific search win-
dow deforming its shape according to appearance
of vehicles in scenes. On the other hand, because
only scale-spaces are investigated for detection, the
original scheme fails to localize a target when its
aspect-ratio is largely different from that of the clas-
sifier. It is also observed that the original approach
show a slightly better detection score than ours in
the scene4 (Figure5(e)) in which insufficient vehicle
size patterns were provided for the S3W-modeling
during initial 10,000 frames. However we can con-
clude that the proposed technique outperforms the
original one because it ensures much more excellent
performance(FPS) with smaller numbers of classifier
evaluations(#CE) on average (Figure5(d)).
5 CONCLUSIONS
In this work, we have presented a novel vehicle de-
tection method based on a scene-specific sliding win-
dow(S3W) technique. Our method does not exhaus-
tively investigate sub-image hypothesises for all pos-
sible scales and aspect-ratios, but classify actually
observable vehicle size patterns only. Whenever a
frame is captured, the proposed system first creates
a foreground mask including all moving blobs in
the scene (Noh and Jeon, 2012), and then conducts
moving-blob analysis to get good-cues to train S3W-
patterns. Next, procedures for S3W-modeling are
carried out, and finally multiple scales and aspect-
ratios of vehicles are localized precisely. Experimen-
tal results have demonstrated superior performance to
the conventional method. However, we found that
the proposed method can cause some false detec-
tions in the severely curved regions of the road. In
such case, because intra-class variations due to view-
point changes become much larger, not only size-
patterns but also classifiers should be trained scene-
specifically. To accomplish this goal, we need to
develop moving direction based classifier learning
methodologies.
ACKNOWLEDGEMENTS
This research was supported by the Pioneer Re-
search Center Program through the National Re-
search Foundation of Korea funded by the Ministry
of Science, ICT & Future Planning (grant number
2012-0009462), and by Ministry of Culture, Sports
and Tourism(MCST) and Korea Creative Content
Agency(KOCCA) in the Culture Technology(CT) Re-
search & Development Program 2012.
ANewVehicleDetectionMethodforIntelligentTransportSystemsbasedonScene-SpecificSlidingWindows
543
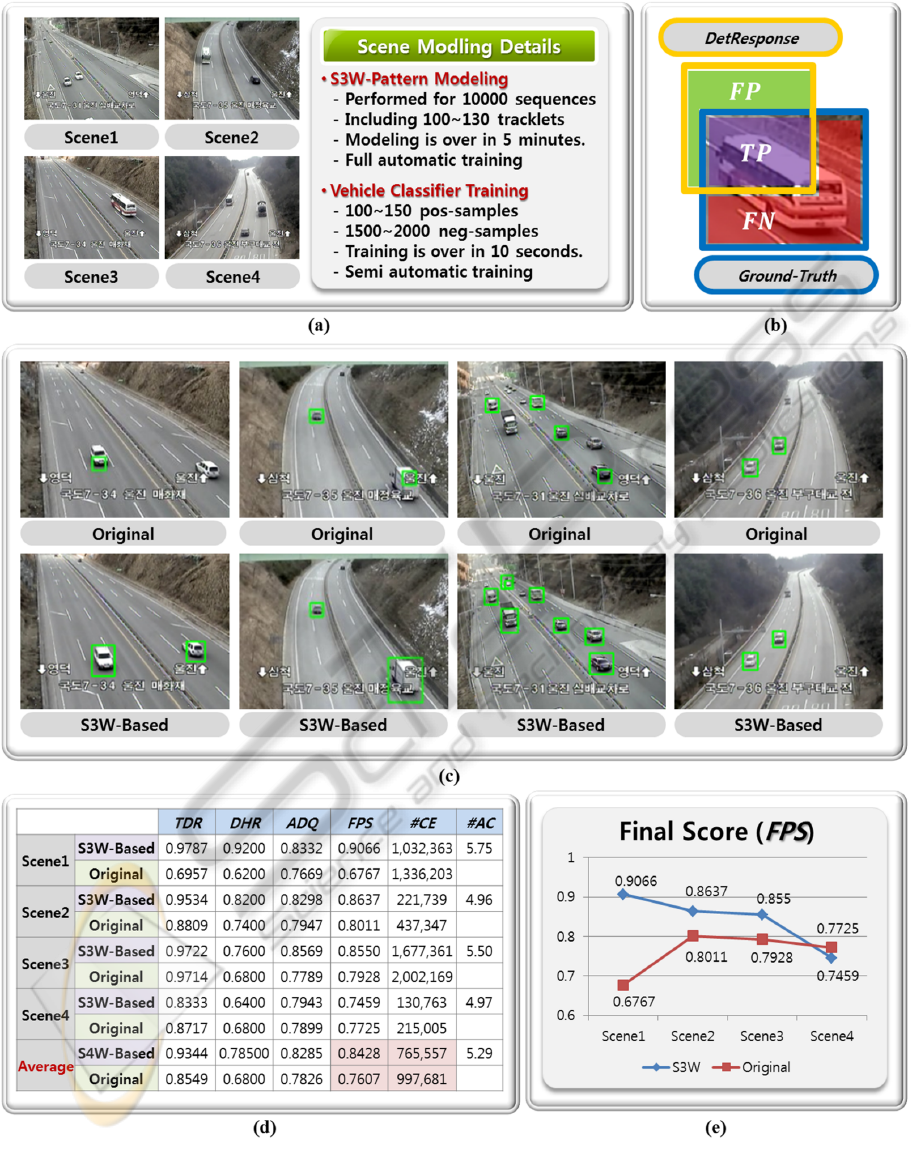
Figure 5: Evaluation settings and results: (a) Tested four road scenes and details of the applied scene modeling procedures;
(b) The concept of the utilized detection quality measure. FP, T P and FN means false positives, true positives and false
negatives, respectively; (c) Qualitative detection results; (d) Quantitative detection results. T DR, DHR, ADQ, FPS, #CE and
#AC indicates the true detection rate, detection hit rate, average detection quality, final performance score, number of classifier
evaluations, and average number of clusters for a scene, respectively; (e) Final performance scores for each evaluated camera
scene.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
544

REFERENCES
(2007). PASCAL visual object classes challenge.
Adelson, E., Anderson, C., Bergen, J., Burt, P., and Og-
den, J. (1984). Pyramid methods in image processing.
Jouranl of RCA-Engineer, 29(6):33–41.
Alexe, T. D. D. and Ferrari, V. (2011). Learning object
classes with generic knowledge. Journal of IJCV.
Blaschko, M. and Lampert, C. (2008). Learning to local-
ize objects with structured output regression. In Proc.
ECCV.
Boykov, Y., Veksler, O., and Zebih, R. (2001). Fast ap-
proximate energy via graph cuts. Journal of PAMI,
22(11):1222–1239.
Breuel, T. (1992). Fast recognition using adaptive subdivi-
sions of transformation space. In Proc. CVPR.
Brubaker, S., Wu, J., J.Sun, Mullin, M., and Rehg, J. (2008).
On the design of cascades of boosted ensembles for
face detection. Journal of IJCV, 77(1-3):65–86.
Chum, O. and Zisserman, A. (2007). An exemplar model
for learning object classes. In Proc. CVPR.
Dalal, N. (2006). Finding people in images and videos. PhD
thesis, Institut National Polytechnique de Grenoble.
Dalal, N., Triggs, B., and Schmid, C. (2006). Human de-
tection using oriented histograms of flow and appear-
ance. In Proc. ECCV.
Dillencourt, M., Samet, H., and Tamminen, M. (1992).
A general approach to connected-component labeling
for arbitary image representations. Journal of ACM,
39(2):253–280.
Felzenszwalb, P., Girshick, R., and Allester, D. (2010). Cas-
cade object detection with deformable part models. In
Proc. CVPR.
Feris, R., Perrerson, J., Siddiquie, B., Brown, L., and
Pankanti, S. (2011a). Large-scale vehicle detection in
challenging urban surveillance environments. In Proc.
WACV.
Feris, R., Siddiquie, B., and Zhai, Y. (2011b). Attribute-
based vehicle search in crowded surveillance videos.
In Proc. ICMR.
Fusier, F., Valentin, V., Bremond, F., Thonnat, M., Borg,
M., Thirde, D., and Ferryman, J. (2007). Video un-
derstanding for complex activity recognition. Journal
of MVA, 18:167–188.
Gavrila, D. (2007). A bayesian exemplar-based approach
to hierarchical shape matching. Journal of PAMI,
29(8):1408–1421.
Keysers, D., Deselaers, T., and Breuel, T. (2007). Optimal
geometric matching for patch-based object detection.
Journal of ELCVIA, 6(1):44–54.
Kim, K., Chalidabhongse, T., Harwood, D., and Davis,
L. (2004). Background modeling and sebtraction by
codebook construction. In Proc. ICIP.
Kushal, A., Schmid, C., and Ponce, J. (2007). Flexible ob-
ject models for category-level 3d object recognition.
In Proc. ICCV.
Lampert, C., Blaschko, M., and Hofmann, T. (2008). Be-
yond sliding windows: object localization by efficient
subwindow search. In Proc. CVPR.
Liebelt, J., Schmid, C., and Schertler, K. (2008). Viewpoint-
independent object class detection using 3d feature
maps. In Proc. CVPR.
Mahalanobis and Chandra, P. (1936). On the general dis-
tance in statistics. In Proc. NISI.
Mikolajczyk, K., Schmid, C., and Zisserman, A. (2004).
Human detection based on a probabilistic assembly of
robust part detectors. In Proc. ECCV.
Noh, S. and Jeon, M. (2012). A new framework for back-
ground subtraction using multiple cues. In Proc.
ACCV.
Perrotton, X., Sturzel, M., and Roux, M. (2011). Implicit
hierarchical boosting for multi-view object detection.
In Proc. CVPR.
Savarese, S. and FeiFei, L. (2007). 3d generic object cate-
gorization, localization and pose estimation. In Proc.
CVPR.
Stenger, B., Tayananthan, A., Torr, P. H. S., and Cipolla, R.
(2006). Model-based hand tracking using a hierarchi-
cal baysian filter. Journal of PAMI, 28(9):1372–1385.
Su, H., Sun, M., FeiFei, L., and Savarese, S. (2009). Learn-
ing a dense multi-view representation for detection,
viewpoint classification and synthesis of object cate-
gories. In Proc. ICCV.
Thomas, A., Ferrari, V., Leibe, B., Tuyelaars, T., Schiele,
B., and Gool, L. (2006). Toward multi-view object
class detection. In Proc. CVPR.
Tuzel, O., Porikli, F., and Meer, P. (2007). Human detection
via classification on riemannian manifolds. In Proc.
CVPR.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Proc. CVPR.
Yan, P., Khan, S., and Shah, M. (2007). 3d model based
object class detection in an arbitrary views. In Proc.
ICCV.
ANewVehicleDetectionMethodforIntelligentTransportSystemsbasedonScene-SpecificSlidingWindows
545
