
Striving for Better and Earlier Movement Prediction by Postprocessing
of Classification Scores
Sirko Straube
1
, Anett Seeland
2
and David Feess
2,3
1
Robotics Group, Faculty of Mathematics and Computer Science, University of Bremen,
Robert-Hooke-Str. 5, 28359 Bremen, Germany
2
Robotics Innovation Center, German Research Center for Artificial Intelligence (DFKI GmbH),
Robert-Hooke-Str. 5, 28359 Bremen, Germany
3
Chair of Global Business, Faculty of Business Administration and Economics, University of Augsburg,
Universitaetsstr. 16, 86159 Augsburg, Germany
Keywords:
EEG, LRP, Brain-computer Interface, Classification Score, Movement Prediction, Online Prediction.
Abstract:
Brain-computer interfaces that enable movement prediction are useful for many application fields from tele-
manipulation to rehabilitation. Current systems still struggle with a level of unreliability that requires im-
provement. Here, we investigate several postprocessing methods that operate on the classification outcomes.
In particular, the data was classified after preprocessing using a support vector machine (SVM). The output
of the SVM, i.e. the raw score values, were postprocessed using previously obtained scores to account for
trends in the classification result. The respective methods differ in the way the transformation is performed.
The idea is to use trends, like the rise of the score values approaching an upcoming movement, to yield a
better prediction in terms of detection accuracy and/or an earlier time point. We present results from different
subjects where upcoming voluntary movements of the right arm were predicted using the lateralized readiness
potential from the EEG. The results illustrate that better and earlier predictions are indeed possible with the
suggested methods. However, the best postprocessing method was rather subject-specific. Depending on the
requirements of the application at hand, postprocessing the classification scores as suggested here can be used
to find the best compromise between prediction accuracy and time point.
1 INTRODUCTION
Movementprediction using the electroencephalogram
(EEG) has a long standing history in the field of
brain-computer interfaces (BCIs) since the discovery
of readiness potentials (Kornhuber and Deecke, 1965;
Libet et al., 1983), which build up long before the ac-
tual movement can occur. Since readiness potentials
reflect preparatory activity and movement preparation
can be aborted, these potentials can also disappear af-
ter a short build up without any movement occurring.
However, the closer such a recorded potential gets to
the actual movement, the stronger it is and the less
likely will a prepared movement be cancelled (Fabi-
ani et al., 2007, for a summary). When the move-
ment is finally executed a corresponding motor po-
tential can be recorded that reflects signalling to the
muscles. For movement prediction, different signals
have been applied, from the readiness potential itself
over the lateralized readiness potential (LRP) which is
closer to the movement and cannot easily be aborted
(Blankertz et al., 2006), to specific frequency compo-
nents in the EEG reflecting neural synchronization or
desynchronization (Bai et al., 2011).
Movement prediction can be used as a powerful
tool in various fields, with the most prominent being
assistance during rehabilitation. Here BCIs predict-
ing a movement can be used to close the gap between
a patient’s intention to move and the actual move-
ment which can result in more intuitive responses
of orthoses (Ahmadian et al., 2013; Kirchner et al.,
2013; Kirchner and Tabie, 2013). Other fields in-
clude non-medical applications, e.g., during telema-
nipulation of a robotic device the user can be sup-
ported using a movement prediction based on EEG
data (Folgheraiter et al., 2011; Folgheraiter et al.,
2012). The idea is that the human operator experi-
ences a smoother interaction with the telemanipula-
tion device, which knows about an upcoming move-
ment. As in the present study, the movement predic-
tion is often based on the LRP.
Decisions in a movement predicting BCI come
13
Straube S., Seeland A. and Feess D..
Striving for Better and Earlier Movement Prediction by Postprocessing of Classification Scores.
DOI: 10.5220/0004632600130020
In Proceedings of the International Congress on Neurotechnology, Electronics and Informatics (NEUROTECHNIX-2013), pages 13-20
ISBN: 978-989-8565-80-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
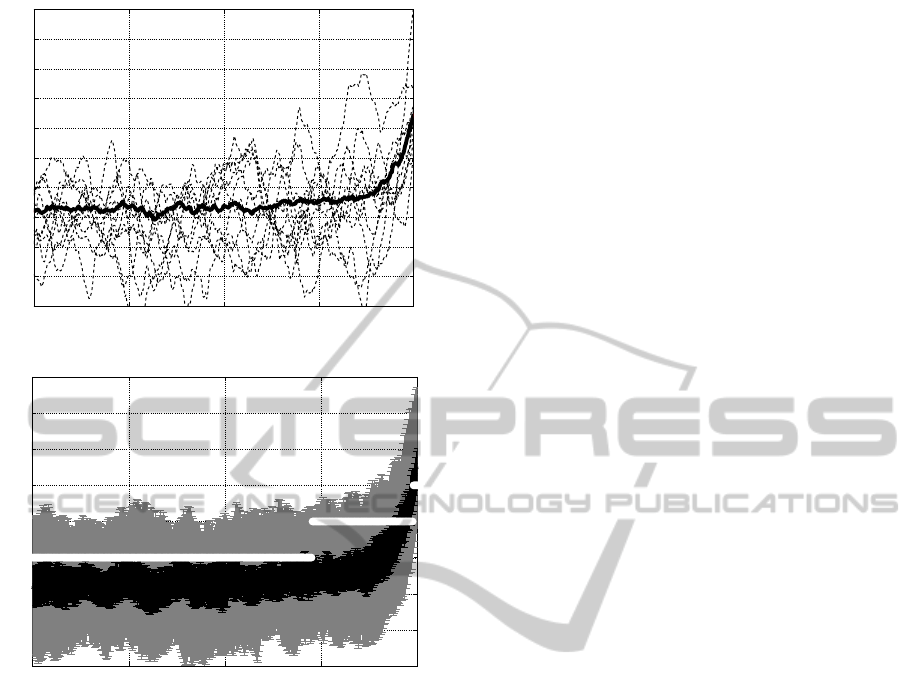
−4 −3 −2 −1 0
−5
−4
−3
−2
−1
0
1
2
3
4
5
time to movement [s]
classification score
(a)
−4 −3 −2 −1 0
−4
−3
−2
−1
0
1
2
3
4
time to movement [s]
classification score
mv
ignore
no mv
(b)
Figure 1: Example data from single subject prior to a move-
ment. Depicted are 4 s of data with the movement onset at
the very right (0ms). (a) The bold black line shows the me-
dian of all 117 epochs. Dashed lines are 10 exemplary sin-
gle trials. (b) Data of the same subject as (a) illustrated as
32/68 percentiles (black) and 5/95 percentiles (dark grey).
The white line denotes time ranges where the data is la-
belled differently for evaluation: no movement (no mv) from
-4000 ms to -1050ms and movement (mv) from -50 ms to
0 ms. In between, data is ignored for true labels (see text).
from some kind of classifier which has to make the
prediction. However, the output of the classifier is
again noisy, so recent approaches try to apply a post-
processing to minimize classification errors (Lemm
et al., 2004; Zhu et al., 2006; Solis-Escalante et al.,
2008; Mohammadi et al., 2012). Here, we follow this
rationale by applying simple online-capable functions
to modify the classifier output according to knowl-
edge about its progression. The scenario is the follow-
ing: After processing, the classifier which is a sup-
port vector machine (SVM) assigns a value, the clas-
sification score, to each data instance (Vapnik, 1995).
The range of these score values depends on the data
at hand and on the classifier and can largely fluctuate
as can be seen in Figure 1. A score of zero denotes
the borderline between the two classes. The figure il-
lustrates the high fluctuations in single trials and the
consistent trend in the data: When the median score
is considered, the score is constantly staying below
zero, i.e., no movement is classified, until the scores
rise approximately 500 ms before the movement and
cross zero approximately at 250ms before onset. The
rise in classification scores before movement onset
can consistently be observed across subjects. This
means that the rise in score values alone may signal
an upcoming movement so that the progression of the
score values itself can be interpreted as being loosely
correlated to the changes in movement probability.
The question now is whether we can use the
knowledge about this rise in classification scores to
make the prediction more stable and/or predict the
upcoming movement earlier. In trying to answer
this question we were seeking for a postprocessing
method that dampens fast fluctuations in classification
scores and stabilizes long rises. To this aim, we ap-
plied several methods that modify the current classi-
fication scores by taking into account previous scores
with a certain weight (see Section 2).
To summarize, if an LRP can be detected by high
levels of the classification score, it could potentially
just as well be predicted earlier by detecting the rise
that leads to that elevated level. In the following we
will describe the postprocessing methods that we have
applied. After a description of the experimental data
used, the results will be presented and discussed.
2 POSTPROCESSING METHODS
From the perspective of a movement prediction appli-
cation it is most desirable to perform robust, binary
decisions: A movement will either occur or it will
not. This decision should be made as reliably and
early as possible. From the large margin classification
perspective, this means that the classification score S
t
at some point in time t would have to be compared
against some threshold b so that a movement mv is
predicted when
mv iff S
t
≥ b. (1)
Yet, as illustrated in Figure 1, the score sometimes
suddenly crosses the threshold when the actual move-
ment is still far away, but then only for a short time.
This behaviour hinders reliable prediction when it is
purely based on the raw value of S
t
crossing b. Look-
ing at the average score progression over time reveals
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
14

a continuous rise of the score values before the ac-
tual movement. Here, we exploit this systematic be-
haviour to find a function F that is able to generate
better movement predictions based on past values of
S, such that
mv iff F(S
t
,S
t−1
,...,S
t−(k−1)
) ≥ b
F
(2)
for some specific threshold b
F
. k is defined as the
number of scores that are used in F with the current
score being at k = 1. In principle, there are no con-
straints on the functional form of F.
In the present study we apply weights to the cur-
rent and previous k − 1 classification outcomes to
transform the current score S
t
. These weights decay
with the number of steps looked into the past. We
also followed an alternative approach by transform-
ing the current score with the average slope of the
past samples. A detailed description is given in Sub-
section 2.2. Both types of functions (weighting and
slope approach) can be expressed as
F(S
t
,S
t−1
,...,S
t−(k−1)
) =
w
1
S
t
+ w
2
S
t−1
+ ·· · + w
k
S
t−(k−1)
(3)
with some predefined weights w. With this methodol-
ogy we try to boost the score value when previous
scores were similar in value and at the same time
penalize scores when previous ones showed a com-
pletely different trend. The approaches are described
in more detail in the following.
2.1 Fixed Weighting
In this set of functions the weights are generated by
very simple functions, each of which assigns a high
weight to the most current classification score sample,
and decreasing weights to older samples.
The functions used are depicted in Fig. 2. All
functions have in common that the weights add up
to one. The coefficients for the
uniform
,
linear
,
square
, and
cubic
method are all generated by eval-
uating
w
τ
=
τ
p
∑
k
i=1
i
p
, τ ∈ {1,...,k}, (4)
respectively, with k the number of coefficients used
and the exponent p according to the corresponding
function type. The
exp
coefficients are accordingly
calculated as
w
τ
=
expτ
∑
k
i=1
expi
, τ ∈ {1,...,k}. (5)
Besides these rather universal functions for choos-
ing the weight we added two variants where we ex-
plicitly forced the current value to have a much higher
t t−1 t−2 t−3 t−4 t−5
−0.5
0
0.5
1
1.5
score index [classification samples]
weight coefficient
uniform
linear
square
cubic
exp
50+uniform
75+uniform
150+slope
Figure 2: Comparison of the functions used for classifica-
tion score postprocessing using k = 6 coefficients, i.e., the
current score and 5 instances back in time.
weight than the scores corresponding to the previous
instances, since the idea behind the postprocessing
was exactly this: Transform the current score with
its history to weaken fast fluctuations and strengthen
longer trends. Again, the weights were set so that they
add up to one. In the
X+uniform
method, the first co-
efficient gets assigned a weight of X%. The remain-
ing weight of [1−(X/100)] is then equally distributed
across the remaining coefficients.
2.2 Slope Approaches
Since the objective is to identify a rise in the classifi-
cation score progression over time we also looked at
modifications of the score value using local slopes or
averaged slope over the last k samples (i.e., the current
sample and k− 1 instances back in time). Considering
two samples, a local slope ∆S
1
t
can be computed as
∆S
1
t
=
S
t
− S
t−1
t − (t − 1)
= S
t
− S
t−1
. (6)
Therefore, the average slope ∆S
k−1
t
over k samples is
∆S
k−1
t
=
1
(k− 1)
k−1
∑
i=1
(S
t−i+1
− S
t−i
). (7)
which is a telescope sum and boils down to
∆S
k−1
t
∝ (S
t
− S
t−(k−1)
). (8)
The corresponding weighting coefficients for this
postprocessing are then
w
1
= 1, w
k
= −1, w
τ
= 0 ∀τ /∈ {1,k},
or w = (1,0,...,0,−1). (9)
In pilot experiments (not shown) this
slope
method was tested and performance levels were con-
sistently far below the performance obtained without
StrivingforBetterandEarlierMovementPredictionbyPostprocessingofClassificationScores
15

any postprocessing. Due to these performances losses
of at least 0.15 points of balanced accuracy (BA, see
Section 4.1) and in worst cases a performance around
the probability of guessing this method was skipped
for the current study.
Nevertheless, since we were looking for stabiliz-
ing a slope, we chose another promising and simple
variant. Instead of using only the slopes, we modu-
late the current score with the slope approach in a 2:1
fashion (score:slope), so that we obtain a weight vec-
tor w of
w = (1.5,0,...,−0.5). (10)
In other words, in this approach we take the current
score value with 100% and add the slope weighted
with 0.5. This variant is called
150+slope
.
3 DATA & PREPROCESSING
The data used for evaluation has been described in de-
tail previously (Kirchner and Tabie, 2013; Tabie and
Kirchner, 2013). Originally, muscle activity has been
recorded simultaneously with the EEG. Here, evalua-
tion has been restricted to EEG data.
3.1 Experimental Data
Eight right-handed male subjects (age: 29.9 ± 3.3
years) participated in the study. They gave written
consent to participate and could abort the experiment
at any time. The study was conducted in accordance
with the Declaration of Helsinki. The subjects were
sitting in a comfortable chair in front of a table with
a monitor showing a fixation cross and giving oc-
casional feedback. They executed self-paced, inten-
tional movements with their right arm by releasing
a button and pressing another one situated 30 cm to
the right. A resting period of 5 s between move-
ments had to be performed for a movement to be
counted as valid. Subjects were not informed about
this time constraint, instead negative feedback was
provided (a red circle around the fixation cross) when
they performed a movement too quickly after another.
In each session 120 correctly performed movements
were recorded, divided into 3 runs (40 movements per
run).
3.2 Preprocessing
The EEG was acquired with 5 kHz, filtered between
0.1 Hz to 1 kHz using the BrainAmp DC amplifier
[Brain Products GmbH, Munich, Germany]. Record-
ings were performed using a 128-channel (extended
10-20) actiCap system (reference at FCz). Electrodes
I1, OI1h, OI2h and I2 were used for electrooculogra-
phy and thus not placed on the scalp. For detection of
the physical movement onset a motion capturing sys-
tem consisting of 3 cameras (ProReflex 1000; Qual-
isys AB, Gothenburg, Sweden) was used at 500Hz.
After synchronization of the two data streams, the
movement onsets were marked in the EEG.
Preprocessing was performed on overlapping win-
dows of 1 s length cut every 10 ms in a range from
−4000ms to 0ms before a movement. Consequently,
a total of 401 score values were computed per exe-
cuted movement. Data were standardized channel-
wise (subtraction of mean and division by standard
deviation) and decimated to 20Hz. Next, a FFT band-
pass filter with a pass band of 0.1 to 4Hz was applied.
Since the prediction should be based on the most re-
cent data, we proceeded with the last 200ms of each
window that were processed by an xDAWN spatial
filter (Rivet et al., 2009) with 4 channels retained. For
feature extraction, raw voltage values were used, stan-
dardized (mean zero, variance one) and classified by
a SVM (Chang and Lin, 2011) with linear kernel.
For trainable components in the signal process-
ing chain (xDAWN, feature normalization and SVM)
windows ending at −100 and 0 ms were labeled as
movement. Training windows for no movement origi-
nated from non-overlappingwindows (1 s length) that
were continuously cut from the data stream, if no
movement occurred 1 s before and 2s after this win-
dow. In addition, a parameter optimization for the
complexity parameter of the SVM was performed us-
ing a grid search (tested values: 10
0
,10
−1
,...,10
−6
).
A 3-fold cross-validation, one fold corresponding
to one experimental run, was applied and classifier
scores were stored for both, training and test data.
4 EVALUATION
As the aim is to detect movements more accurately
and/or earlier, there are basically two criteria for a
good postprocessing. One is the detection accuracy,
the other the time point of detection. Both are consid-
ered for evaluation.
4.1 Movement Detection Accuracy
The prediction of unique events comes along with un-
balanced proportions of the two classes no movement
and movement, i.e., class instances of data containing
the LRP (in our case) will be underrepresented. The
evaluation of the movement detection accuracy has to
take this into account. Thus, the simple accuracy is
misleading (Kubat et al., 1998, for discussion), so a
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
16

metric is required which is insensitive to imbalanced
classes.
One of the most intuitive measures existing in
such a case is the balanced accuracy (BA) which is
defined as the mean of true positive rate (TPR) and
true negative rate (TNR):
BA =
TPR+ TNR
2
. (11)
One of the challenges here is to define a ground truth
of when the relevant signal (i.e., the LRP) is actu-
ally present in the data. While we can postulate that
there must be an LRP prior to each movement, we
still do not know the precise onset of this signal. To
cope with this issue and thereby get unambiguously
labelled data for evaluation, we split the time before a
movement into three phases (compare Figure 1), a no
movement phase from -4000ms to -1050ms, a move-
ment phase from -50ms to 0 ms, and the phase in be-
tween (-1050ms to -50 ms) where the data is ignored
and not labelled at all. With this approach we obtain
a clear labeling in phases where we are sure that the
relevant signal is indeed contained in the data. This
signal is, of course, also present in the ignored time
range, but since we do not know the exact onset this
range is skipped. In the actual application where no
data are skipped, a movement is predicted whenever
the classifier score crosses the threshold.
4.2 Time Point of Detection
The onset of the signal related to movement (here, the
LRP) occurs at an unknown point in time before the
actual movement. This transition out of noise is typ-
ical for event-related potentials and it is reflected in
the rise of classification scores that we intend to sta-
bilize with the postprocessing approaches introduced
here. Concerning the application, i.e., the predic-
tion of an upcoming movement, the exact time point
is of less importance than a reliable and stable pre-
diction by the classifier. For this, it remains to de-
fine when exactly we consider the LRP as detected—
the classification score might at any time rise over
a given threshold for a short period of time due to
noise. For the same reason, the score might fall be-
low the threshold for some samples although the LRP
has—supposedly—already been correctly detected.
To make sure that we base our evaluation on a sta-
ble prediction, the LRP onset was defined as the point
in time where the classification scores do not drop be-
low the threshold for N predictions. This point was
found by going back in time from the actual move-
ment onset until the first time where this criterion was
not met. With this method, the LRP onset used for
evaluation is then defined as the first score sample
Figure 3: Single trial example for determination of LRP on-
set with N = 10 specifying the number of samples a false
negative classification is tolerated. The dashed red lines de-
limit the feasible (transition) area, the solid green line indi-
cates the detected LRP onset. Setting N = 10 provokes that
the small dip around -200ms is ignored.
crossing the threshold after the set of samples staying
below threshold for N predictions.
The choice of N depends on the level of noise,
on the classification scores, on the sampling rate, and
on the characteristics of the signal applied for move-
ment prediction. Here, the relevant signal has a length
of approximately 1 s (Fabiani et al., 2007), so we
chose N = 10 as a good compromise between robust-
ness (higher N) and reliability (lower N), i.e., we tol-
erate false classifications during periods shorter than
100 ms. Increasing the robustness here means to al-
low an earlier estimation of the time point of detec-
tion, because fluctuations in the score progression are
more and more ignored with increasing N. On the
contrary, a decrease of N increases the reliability, be-
cause fewer classifications of no movement can occur
after the estimated time point of detection, but this
comes at the cost of a higher sensitivity to outliers.
To give an alternative view on the value of N: Setting
N = 10 in our data means that the movement onset is
defined as the first score sample crossing the threshold
after a 100 ms window without any predicted move-
ment (viewed backwards from the actual movement
onset). The approach is illustrated in Figure 3.
4.3 Evaluation Procedure
For each subject and cross-validation fold two data
sets exist: one training data set (80 movements) and
one test data set (40 movements). The training set
is the one used to train the classifier producing the
classification scores. Due to the fact that the post-
processing methods introduced here change the abso-
lute value of the classification score, the score thresh-
olds (transition from one class to the other) were
re-adjusted for each method, respectively, using the
StrivingforBetterandEarlierMovementPredictionbyPostprocessingofClassificationScores
17
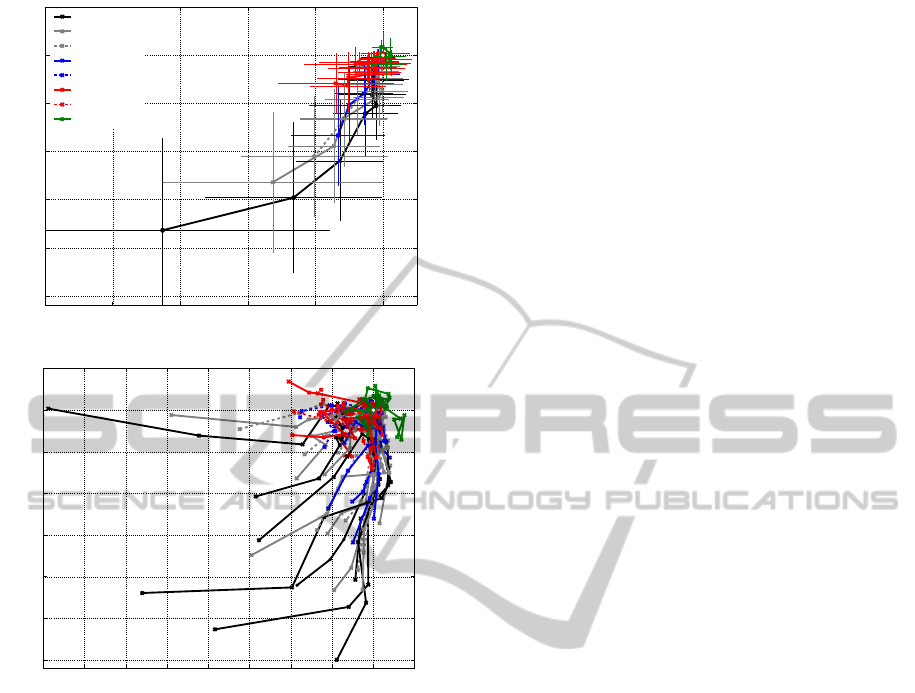
−500 −400 −300 −200 −100 0
0.75
0.8
0.85
0.9
0.95
1
1.05
relative prediction onset [ms]
relative performance [BA]
uniform
linear
square
cubic
exp
50+uniform
75+uniform
150+slope
(a)
−800 −700 −600 −500 −400 −300 −200 −100 0 100
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
relative prediction onset [ms]
relative performance [BA]
(b)
Figure 4: Performance changes (BA and onset time) of post-
processing methods. The results are illustrated relative to
the case where the scores were not further processed, il-
lustrated as a white dot at (0,1). Each data point corre-
sponds to a different k ∈ {1,2, 4,8,12,16,20,40,60,100}
(see text). In (a) the grand average results over all subjects
are shown as mean and standard deviation for each k, re-
spectively. Thus, there is one line for each method applied.
In (b) the same results are shown for all subjects, separately.
training data, before evaluation was performed on the
test data. The results presented in the following show
the performance in terms of detection accuracy and
time point of detection on the test data.
5 RESULTS & DISCUSSION
All investigated methods introduced in Section 2 and
illustrated in Figure 2 were tested for different values
of the parameter k ∈ {1,2,4,8, 12,16,20,40,60, 100}
which is the number of scores used with the respec-
tive method. Since a key motivation for the current
work was to modify the current score by the values
of the neighbouring scores, we chose a finer granular-
ity for sampling near the current score. Without post-
processing, the movements were predicted on average
over all subjects 180 ms before the movement onset
with a balanced accuracy of 0.8. Since we were inter-
ested in performance improvements concerning these
two measures, the results are illustrated as relative
changes according to these reference performances
in Figure 4 (a). The figure shows the average result
for all methods applied for the two criteria detection
accuracy and time point of detection (see Section 4).
Here each data point corresponds to a particular value
for k, with k = 100 being the first data point on the
lower left of the plot and the next smaller value for
k being the next on the connecting line. Finally, all
methods meet at k = 1 on the upper right at a relative
prediction onset of 0 ms and a relative performance of
1, because all of these have an identical weight vector
of w = (1). This point (highlighted as white spot in
Figure 4) with k = 1 is equal to the reference perfor-
mance without any postprocessing.
The results in Figure 4 (a) indicate that the perfor-
mance obtained when using the raw score values was
already on a high level regarding the time point of de-
tection and the classification accuracy. In the figure,
a postprocessing method outperformingthis reference
would be on the upper left relative to this point. This
we observed only for the slope approach
150+slope
,
where we found configurations for k ∈ {2,4} that re-
vealed a slight improvement on average in both, ac-
curacy and time point.
From the figure, it is far more apparent that most
methods enabled an earlier prediction of the move-
ment on the cost of (mostly) slight performancedrops.
In the most extreme case for the
uniform
approach
with k = 100, this means more than 300 ms ear-
lier prediction at a loss of 18% of the initial perfor-
mance. Overall improvements in classification accu-
racy on the average level were only revealed for the
150+slope
approach.
The reason for the large standard deviations de-
picted in Figure 4 (a) is disclosed by illustration of
the single-subject results in Figure 4 (b). The benefit
of the applied method strongly differed between sub-
jects, so that the results in Figure 4 (a) only show the
rough trend. On the single-subject level we observed
slight improvements for both, time point and accu-
racy. However, the best method was subject-specific.
Again, most extreme differences where achieved us-
ing the
uniform
approach: Using k = 100 we could
detect the movement nearly 800 ms earlier without
any performance loss for one subject, while the same
configuration resulted in only 100 ms earlier detec-
tion at a loss of 30% of the initial performance for an-
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
18

other. In the analysis, especially subjects with a worse
performance on the raw scores could benefit from the
postprocessing.
To summarize, the postprocessing methods pre-
sented here provide a tool to modify mainly the earli-
ness of the prediction and to a little extent the clas-
sification accuracy. The
150+slope
method with
k ∈ {2,4} worked best on the average level and en-
hanced both, time point of detection and accuracy. On
the single-subject level, the individual best method
differed, so that the spectrum presented here can serve
as a general framework to adjust the movement pre-
diction according to the respective application and/or
the data of the individual subject.
6 CONCLUSIONS
Without any postprocessing, the classification of each
window is performed independentlyof the neighbour-
ing windows. However, we can see in the distribu-
tions of these classification outcomes that they intrin-
sically carry information about the probability of an
upcoming event, like the rise in scores illustrated in
Figure 1. Here, we use simple methods that can eas-
ily be applied during online movement prediction to
make use of this knowledgeand stabilize a single clas-
sification by the surrounding ones. The methodology
introduced here can be used as a tool to improve clas-
sification outcomes.
Since the performance and the time point of pre-
diction can be both equally relevant for an application,
we considered these two measures together. Taking
these, we could show that the applied methods suc-
ceed for individual subjects in improving the accuracy
and/or time point of prediction, although we could not
find one straightforward solution in the current study
for all subjects investigated. For most methods we
found a trade-off between these two metrics. This
means for the application of such a movement predict-
ing system, that one can indeed enhance the system,
but has to carefully chose the postprocessing method
according to the requirements of the intended appli-
cation.
On average we could observe an improvement of
both, time point of detection and accuracy, using the
150+slope
method with small values of k. However,
we found the most pronounced effects on the single-
subject level: the proposed methods performed in-
dividually different. In an application, such a high
subject-specificity can be dealt with using two ap-
proaches: either extra calibration time is used to find
the best individual method, or the prediction itself is
integrated in the application in a way that is flexible
or robust enough to make use of the possible benefits
illustrated here. Since the predictions obtained with-
out postprocessing can serve as a reliable fallback op-
tion, this could be realized, e.g., by using a number
of the proposed approaches on top and making the fi-
nal prediction from the ensemble. More in general,
although the finding of a subject specificity is consis-
tent with results from other postprocessing methods
(Mohammadi et al., 2012), it should be helpful to re-
veal the particular origins of these effects in the score
progression to develop a method that generalizes bet-
ter. So far, existing postprocessing methods operate
rather blindly on the data which may cause the indi-
vidual differences.
While most research is dedicated to improvement
of the classifier and/or preprocessing algorithms, the
idea of postprocessing of classification outcomes as
such is not completely new. Techniques for incorpo-
rating preceding probabilities to enhance the current
prediction have been proposed (Lemm et al., 2004;
Zhu et al., 2006), but not been evaluated in the way
we did in the present study. Therefore and since SVM
scores do not directly represent probabilities like in
a Bayesian framework, a direct comparison with the
methods we proposed is difficult. However, from the
technical point of view all of these methods have in
common that they actually manipulate single predic-
tion outcomes making use of the individual predic-
tion history. Other techniques exist for postprocessing
that rather operate on the global level by changing the
decision criterion of the classifier or using additional
thresholds. Here, threshold selection, dwell time op-
timization or debiasing of the score time course have
been proposed (Solis-Escalante et al., 2008; Moham-
madi et al., 2012). Due to their different nature, these
techniques can be easily combined with what we pro-
posed here, as we already implicitly did by including
threshold optimization (see Section 4.3) and selecting
a stability criterion of 100 ms (N = 10; see Section
4.2 and Figure 3), which can be interpreted as a dwell
time.
With the approach outlined here, other and more
complex algorithms can of course be used, although
they might have the possible drawback of being too
computationally complex for an online predicting
system. Generally, the methods applied here are not
specific for the context of movement prediction, so
they can be used in any context where such postpro-
cessing may be helpful.
ACKNOWLEDGEMENTS
This work was supported by the German Bundesmin-
StrivingforBetterandEarlierMovementPredictionbyPostprocessingofClassificationScores
19

isterium fur Wirtschaft und Technologie (BMWi,
grant FKZ 50 RA 1012 and grant FKZ 50 RA 1011).
The authors like to thank Marc Tabie for providing us
with the evaluation data.
REFERENCES
Ahmadian, P., Cagnoni, S., and Ascari, L. (2013). How ca-
pable is non-invasive EEG data of predicting the next
movement? A mini review. Frontiers in Human Neu-
roscience, 7:124.
Bai, O., Rathi, V., Lin, P., Huang, D., Battapady, H., Fei,
D.-Y., Schneider, L., Houdayer, E., Chen, X., and
Hallett, M. (2011). Prediction of human voluntary
movement before it occurs. Clinical Neurophysiology,
122(2):364–372.
Blankertz, B., Dornhege, G., Lemm, S., Krauledat, M., Cu-
rio, G., and M¨uller, K. (2006). The Berlin Brain-
Computer Interface: machine learning based detec-
tion of user specific brain states. Journal of Universal
Computer Science, 12(6):581–607.
Chang, C.-C. and Lin, C.-J. (2011). LIBSVM:
A library for support vector machines. ACM
Transactions on Intelligent Systems and Tech-
nology, 2:27:1–27:27. Software available at
http://www.csie.ntu.edu.tw/ cjlin/libsvm.
Fabiani, M., Gratton, G., and Federmeier, K. D. (2007).
Event-related brain potentials: Methods, theory, and
applications. In Cacioppo, J., Tassinary, L. G., and
Berntson, G. G., editors, Handbook of Psychophys-
iology, pages 85–119. Cambridege University Press,
Cambridge [u.a], 3rd edition.
Folgheraiter, M., Jordan, M., Straube, S., Seeland, A., Kim,
S. K., and Kirchner, E. A. (2012). Measuring the im-
provement of the interaction comfort of a wearable ex-
oskeleton. International Journal of Social Robotics,
4(3):285–302.
Folgheraiter, M., Kirchner, E. A., Seeland, A., Kim, S. K.,
Jordan, M., W¨ohrle, H., Bongardt, B., Schmidt, S.,
Albiez, J., and Kirchner, F. (2011). A multimodal
brain-arm interface for operation of complex robotic
systems and upper limb motor recovery. In Vieira,
P., Fred, A., Filipe, J., and Gamboa, H., editors, In
Proceedings of the 4th International Conference on
Biomedical Electronics and Devices (BIODEVICES-
11), pages 150–162, Rome. SciTePress.
Kirchner, E. A., Albiez, J., Seeland, A., Jordan, M., and
Kirchner, F. (2013). Towards assistive robotics for
home rehabilitation. In Chimeno, M. F., Sol´e-Casals,
J., Fred, A., and Gamboa, H., editors, In Proceedings
of the 6th International Conference on Biomedical
Electronics and Devices (BIODEVICES-13), pages
168–177, Barcelona. SciTePress.
Kirchner, E. A. and Tabie, M. (2013). Closing the gap:
combined EEG and EMG analysis for early movement
prediction in exoskeleton based rehabilitation. In Pro-
ceedings of the 4th European Conference on Techni-
cally Assisted Rehabilitation - TAR 2013.
Kornhuber, H. H. and Deecke, L. (1965). Hirnpoten-
tial¨anderungen bei Willk¨urbewegungen und passiven
Bewegungen des Menschen: Bereitschaftspotential
und reafferente Potentiale. Pfl¨uger’s Archiv f¨ur die
gesamte Physiologie des Menschen und der Tiere,
284(1):1–17.
Kubat, M., Holte, R. C., and Matwin, S. (1998). Machine
learning for the detection of oil spills in satellite radar
images. Machine Learning, 30(2-3):195–215.
Lemm, S., Sch¨afer, C., and Curio, G. (2004). BCI competi-
tion 2003–data set III: probabilistic modeling of sen-
sorimotor mu rhythms for classification of imaginary
hand movements. IEEE Transactions on Biomedical
Engineering, 51(6):1077–80.
Libet, B., Gleason, C. A., Wright, E. W., and Pearl, D. K.
(1983). Time of conscious intention to act in relation
to onset of cerebral activity (readiness-potential) the
unconscious initiation of a freely voluntary act. Brain,
106(3):623–642.
Mohammadi, R., Mahloojifar, A., and Coyle, D. (2012).
A combination of pre- and postprocessing techniques
to enhance self-paced BCIs. Advances in Human-
Computer Interaction, 2012:3:1–3:10.
Rivet, B., Souloumiac, A., Attina, V., and Gibert, G. (2009).
xDAWN algorithm to enhance evoked potentials: ap-
plication to brain-computer interface. IEEE Transac-
tions on Biomedical Engineering, 56(8):2035–2043.
Solis-Escalante, T., M¨uller-Putz, G., and Pfurtscheller, G.
(2008). Overt foot movement detection in one single
laplacian EEG derivation. Journal of Neuroscience
Methods, 175(1):148–153.
Tabie, M. and Kirchner, E. A. (2013). EMG onset detec-
tion – comparison of different methods for a move-
ment prediction task based on EMG. In Alvarez,
S., Sol´e-Casals, J., Fred, A., and Gamboa, H., ed-
itors, In Proceedings of the 6th International Con-
ference on Bio-inspired Systems and Signal Process-
ing (BIOSIGNALS-13), pages 242–247, Barcelona.
SciTePress.
Vapnik, V. N. (1995). The nature of statistical learning the-
ory. Springer New York, Inc., New York, NY, USA.
Zhu, X., Wu, J., Cheng, Y., and Wang, Y. (2006). GMM-
based classification method for continuous prediction
in brain-computer interface. In Proceedings of the
18th International Conference on Pattern Recognition
- Volume 01, ICPR ’06, pages 1171–1174, Washing-
ton, DC, USA. IEEE Computer Society.
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
20
