
Command-line Electrophysiology
A Closed-loop Approach to Single Cell Characterisation
Jo˜ao Couto
1
, Daniele Linaro
1
and Michele Giugliano
1,2,3
1
Theoretical Neurobiology and Neuroengineering, Dept. Biomedical Sciences, Univ. of Antwerp, B-2610 Wilrijk, Belgium
2
Dept. Computer Science, Univ. of Sheffield, S1 4DP Sheffield, U.K.
3
Laboratory of Neural Microcircuitry, Brain Mind Institute, EPFL, CH-1015 Lausanne, Switzerland
1 OBJECTIVES
Neuronal electrophysiology experiments are typically
performed by using expensive commercial software
packages and/or custom written applications: the lat-
ter are usually suited only for particular experiments
and lack documentation. Additionally, the currently
available packages, while focussing on usability by a
large community of scientists, fail to provide proper
scripting methods to systematically span the parame-
ter space or to apply standard optimisation techniques
while performing the experiment.
As neuroscience progresses, scientists are faced
with questions that can only be answered by precisely
triggering the stimulation to ongoing features of the
experiment. This implies the usage of experimental
paradigms that rely on short latencies (Prinz et al.,
2004; Wallach et al., 2011) and whose implementa-
tion may require particular hardware and/or can be
time consuming to develop from scratch. Recently,
there has been growing interest in novel experimen-
tal paradigms based on real-time systems to perform
closed-loop stimulation (Bettencourt et al., 2008; Lin
et al., 2010; Zrenner et al., 2010): however, these ap-
proaches lack modularity and ease of integration with
general scripting languages as they heavily rely on
graphical user interfaces.
We developed a flexible software platform called
LCG, whose main objective is to enable scientists to
abstract from the technical details of the experiment
while providing simple yet powerful tools to analyse
online the recorded data and react accordingly.
LCG was developed with the following goals in
mind:
• Serve as a general abstract platform for single cell
and network electrophysiological experiments.
• Implement dynamic clamp (see (Robinson and
Kawai, 1993; Sharp et al., 1993; Prinz et al.,
2004) for a review) with active electrode compen-
sation (Brette et al., 2008) to allow single elec-
trode experiments.
• Allow relatively easy implementation of closed
loop and hybrid experiments.
• Support multiple real-time engines in a standard
desktop computer.
• Provide a simple installation procedure and sup-
port for scripting for on-the-fly parameter optimi-
sation.
In the following sections we present the main features
of LCG, which are relevant for performing in vitro or
in vivo experiments employing both intracellular and
extracellular recordings. As an application example,
we describe a way to efficiently characterise the input-
output relationship of single cells using a closed loop
approach.
2 METHODS
The toolbox is written in C/C++ and consists of a li-
brary that can be linked to C/C++ programs written
by the user. The software uses COMEDI to interface
with the data acquisition card and supports two real-
time Linux kernels, PREEMPT-RT and RTAI. It is
worthwhile noting that, for performing standard volt-
age or current clamp experiments, the system does not
require a real-time kernel.
The compilation of LCG generates two command-
line applications that allow the user to perform non
real-time (i.e., classical voltage and current clamp and
extracellular recordings) and real-time experiments,
respectively. This also implies that users do not need
to have any knowledge of a programming language
to effectively use LCG. The choice of a command-
line interface (CLI) over a graphical user interface of-
fers speed (an experienced user can perform the same
task much faster using a CLI), stability (CLIs do not
change between software updates) and scripting ca-
pabilities, enabling the user to automate a sequence
Couto J., Linaro D. and Giugliano ..
Command-line Electrophysiology - A Closed-loop Approach to Single Cell Characterisation.
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
of tasks by including them in a script. Additionally,
the real-time program uses XML configuration files
that (i) allow to programmatically explore physiolog-
ical parameter ranges from a script, (ii) assure repro-
ducibility since the configuration file can be stored
with the recorded data and (iii) allow the development
of complex protocols.
2.1 Toolbox Design Considerations
LCG is based on the concept of interacting entities:
these are objects that can have multiple inputs, have
one single output and can be connected to each other.
Importantly, they implement the necessary logic to
produce the output at each time step of the experi-
ment. By making that every class in LCG is an entity
and assuring that each entity performs only one spe-
cific task, code reusability is maximised, since com-
plex experiments can be designed by combining mul-
tiple entities together. Entities can also communicate
with each other asynchronously by emitting events:
these are delivered to all connected entities and can be
used, for instance, to communicate the occurrence of
a spike or to send trigger and reset messages to other
entities.
While it is possible to implement new custom entities
in C++, LCG provides a set of entities that allow to
perform common tasks such as data input and output,
storing recorded data in compressed format, and gen-
erating arbitrary (current/voltage/conductance) wave-
forms. To perform hybrid experiments, LCG comes
with a set of entities that implement commonly used
neuronal and synaptic models.
3 RESULTS
We now discuss a simple application where LCG was
used to record from pyramidal neurons in acute brain
slices of the somatosensory cortex of juvenile rats.
One of the ways to characterise the input-output
relation of single neurons is by computing the current-
frequency relationship (f-I curve). This is tradition-
ally done by applying several DC current steps of var-
ious amplitudes and measuring the corresponding fir-
ing frequency. As one has to let the cell recover be-
tween trials it can take several minutes to compute an
f-I curve, and the curve is sampled coarsely since the
current injected in the neuron is constant during each
trial. We propose a novel approach to measuring the
input-output relation by performing the experiment
in closed loop using a proportional-integral-derivative
(PID) controller. A sketch of the experimental setup is
shown in Fig. 1A: a Real Neuron entity records the in-
10
20
30
200
400
600
f (Hz)
I (pA)
5s
0.5nA
15Hz
0.2nA
5Hz
V
m
F
target
I
PID
Frequency
Estimator
Real Neuron
PID
Controller
Ramp
C
B
A
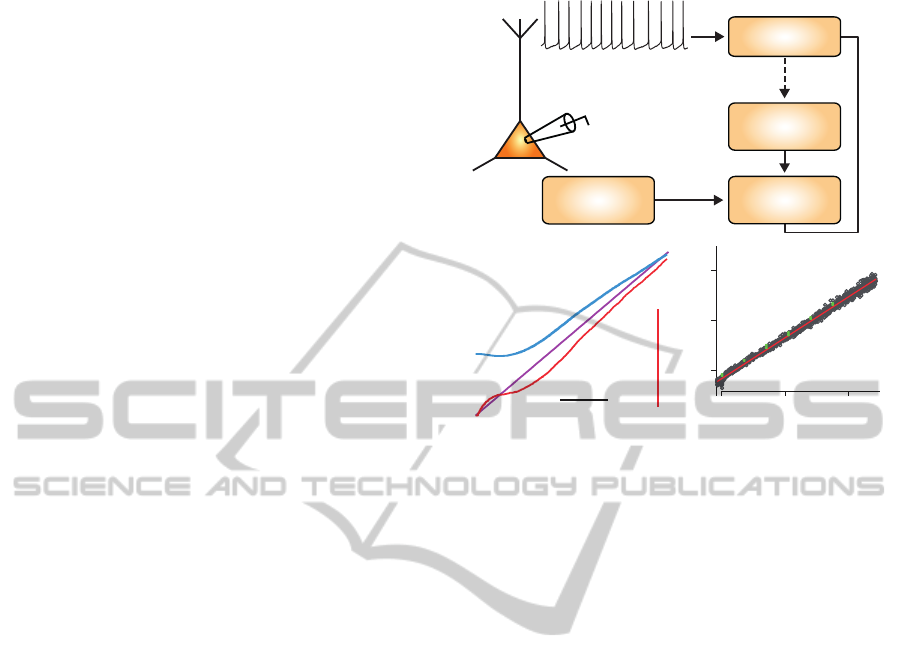
Figure 1: Example of computation of an f-I curve with a
PID controller. A Schematic representation of the experi-
mental setup (see text for explanation). B Example of the
frequency estimate (red) and of the injected current (blue)
to have the firing frequency follow a frequency ramp rang-
ing from 5 to 30Hz (magenta trace). The blue curve is the
current injected by the controller. C Instantaneous firing
frequency (inverse of the ISI) as a function of the injected
current (gray circles). The red line is a linear fit to the data
and the green dots are the f-I curve computed using the stan-
dard method.
tracellular membrane potential of the cell under anal-
ysis and detects its spikes, which are sent, as events, to
the Frequency Estimator entity. The output of the es-
timator is sent to the PID controller, which compares
it to a target value, in this case a Ramp waveform.
The controller, in turn, computes the current required
to clamp the neuron to the target firing frequency and
feeds it back to the neuron. The time course of the
estimated firing frequency and of the injected current
are shown in Fig. 1B, while the computed f-I curve
is shown in Fig. 1C. The red curve is a first degree
polynomial fit to the inverse of the ISIs (gray circles)
and the green dots are the f-I curve computed with the
“traditional” method. The computation of an f-I curve
with the method presented here takes around 30 sec
and provides a much better sampling than the tradi-
tional method. This is possible because the output
of the PID is constant between spikes, thus allowing
to associate each inter-spike interval (ISI) to a spe-
cific (constant) value of current, building the f-I curve
shown here.
This closed-loop approach is substantially differ-
ent from the injection of a ramp of current to compute
the f-I curve: in fact, in the latter case, the current
injected between spikes is not constant, which makes

associating an ISI with a particular current value dif-
ficult.
Additionally, this same experimental setup allows
to clamp the firing frequency of a neuron at a given
value, which can be useful in protocols that require
delivering perturbations at fixed phases in the firing
cycle of the cell (Miranda-Dom´ınguez et al., 2010).
4 DISCUSSION
In this contribution we have presented LCG, a soft-
ware to perform open- and closed-loop electrophysi-
ological experiments. We have described some of the
general principles that underly code reusability and
flexibility of the toolbox. As a test case, we have
shown a novel efficient way of measuring the input-
output relationship of neurons by continuously esti-
mating the firing frequency of the cell and, in closed-
loop, clamping it to a desired frequency value. This
allows to sample the f-I curve both with very high res-
olution and in a relatively short time (less than 30s).
We are currently using LCG to perform both
dynamic clamp experiments where very low laten-
cies are required and in vivo experiments combining
whole cell with extracellular recordings where large
populations of neurons are probed simultaneously.
Using LCG in conjunction with high-level scripting
languages such as Python or Matlab offers several ad-
vantages, among which we mention:
• the possibility to use standard optimisation proce-
dures to find, in real-time, optimal parameter val-
ues.
• The possibility to implement an experimental
pipeline with standardised protocols, which allow
to easily compare cells across experimental condi-
tions and to speed up the successive data analysis.
• A relatively easy implementation of hybrid mi-
crocircuits, along the lines of what has been pre-
sented in (Kispersky et al., 2011).
It is worthwhile noting that, while some commercial
and open source packages offer scripting capabili-
ties, the possibility of performing electrophysiologi-
cal recordings at the command line opens new pos-
sibilities for automating experimental workflows and
allows users to closely integrate standard optimisation
tools (for instance from Python’s Numpy module) in
their experiments.
By enabling closed loop experiments at various lev-
els of latency and allowing to interface with general-
purpose scripting languages, LCG has the potential to
boost electrophysiologicalresearch to another level of
automation and protocol complexity with minimal ef-
fort on the neuroscientist part.
ACKNOWLEDGEMENTS
D.L. is supported by the Flanders Research Foun-
dation (grant no. 12C9112N, http://www.fwo.be).
This work was partly supported by the University of
Antwerp and by the European Commission, through
the Seventh Framework Programme under the ICT -
Future and Emerging Technologies scheme (project
ENLIGHTENMENT, grant agreement no. 284801).
REFERENCES
Bettencourt, J., Lillis, K., Stupin, L., and White, J. (2008).
Effects of imperfect dynamic clamp: computational
and experimental results. Journal of Neuroscience
Methods, 169:282–289.
Brette, R., Piwkowska, Z., Monier, C., Rudolph-Lilith, M.,
Fournier, J., Levy, M., Fr´egnac, Y., Bal, T., and Des-
texhe, A. (2008). High-resolution intracellular record-
ings using a real-time computational model of the
electrode. Neuron, 59(3):379–391.
Kispersky, T. J., Economo, M. N., Randeria, P., and White,
J. A. (2011). GenNet: A platform for hybrid network
experiments. Frontiers in Neuroinformatics, 5:11.
Lin, R., Bettencourt, J., White, J., Christini, D., and Butera,
R. (2010). Real-time experiment interface for biolog-
ical control applications. In Engineering in Medicine
and Biology Society (EMBC), pages 4160–4163.
Miranda-Dom´ınguez, O., Gonia, J., and Netoff, T. I.
(2010). Firing rate control of a neuron using a lin-
ear proportional-integral controller. Journal of Neural
Engineering, 7(6):066004.
Prinz, A. A., Abbott, L. F., and Marder, E. (2004). The dy-
namic clamp comes of age. Trends in neurosciences,
27(4):218–224.
Robinson, H. P. and Kawai, N. (1993). Injection of digitally
synthesized synaptic conductance transients to mea-
sure the integrative properties of neurons. Journal of
Neuroscience Methods, 49(3):157–165.
Sharp, A. A., O’Neil, M. B., Abbott, L. F., and Marder,
E. (1993). The dynamic clamp: artificial conduc-
tances in biological neurons. Trends in neurosciences,
16(10):389–394.
Wallach, A., Eytan, D., Gal, A., Zrenner, C., and Marom, S.
(2011). Neuronal response clamp. Frontiers in neuro-
engineering, 4:3.
Zrenner, C., Eytan, D., Wallach, A., Thier, P., and
Marom, S. (2010). A generic framework for real-time
multi-channel neuronal signal analysis, telemetry con-
trol, and sub-millisecond latency feedback generation.
Frontiers in neuroscience, 4:173.
