
A Light-weight Exoskeleton for Hip Flexion-extension Assistance
Francesco Giovacchini
1
, Matteo Fantozzi
1
, Mariele Peroni
1
, Matteo Moisé
1
, Marco Cempini
1
,
Mario Cortese
1
, Dirk Lefeber
2
, Maria Chiara Carrozza
1
and Nicola Vitiello
1
1
The BioRobotics Institute, Scuola Superiore Sant’Anna, viale Rinaldo Piaggio 34, 56025 Pontedera, Italy
2
Department of Mechanical Engineering, Faculty of Applied Sciences, Vrije Universiteit Brussel,
Pleinlaan 2, B-1050, Brussels, Belgium
Keywords: Lower-limb Assistive Exoskeleton, Wearable Robot, Powered Orthosis, Assistive Technology, Gait Aid,
Series Elastic Actuator.
Abstract: Wearable robots can represent a way to rehabilitate and/or assist people affected by gait disorders that are
common problems associated with ageing, following orthopedic surgery or diseases like brain injuries. In
order to improve their usability and effectiveness, exoskeletons aiming at assisting people affected by gait
impairments should be light-weight devices and have safe and low output impedance actuators. In this paper
we present a light-weight exoskeleton endowed with two series elastic actuators for hip flexion-extension
assistance.
1 INTRODUCTION
Gait disorders and lower-limb impairments are
common and often devastating companions of
ageing (Snijders, 2007). Old age is the most
important risk factor for gait disturbance (Stolze,
2005): several population-based study has shown a
35% prevalence of gait disorders among persons
over age 70 (Verghese, 2006), and 80% over 85
years of age.
Gait disorders lead to several major
consequences, including falling (leading to major
fractures or head trauma), the number of which is
expected to reach 500,000 by the year 2040, leading
to a total annual cost of 16 billion dollars (Burge,
2007). Another important consequence is reduced
mobility, which leads to loss of independence. Gait
disorders are also associated with reduced survival,
which can be attributed to a combination of fatal
falls, reduced cardiovascular fitness, and death from
an underlying disease (Snijders, 2007; Wilson, 2002;
Verghese, 2006).
Wearable robotic orthoses (namely
“exoskeletons”) capable to rehabilitate and/or assist
people affected by gait disorders have been proposed
as a solution by many research teams active in the
field of rehabilitation robotics (Pons, 2010; Ronsse
2011a; Ronsse 2011b). Both unilateral and bilateral
robotic exoskeletons are available in the current state
of the art and relevant for this study (Dollar, 2008).
Relevant unilateral orthoses – among many –
are: ALEX, a 2 DoF powered leg exoskeleton
(Banala, 2006); the ankle-foot and knee-ankle-foot
orthoses powered by McKibben type pneumatic
muscles developed by Sawicki (Sawicki, 2005),
SERKA, an active knee orthosis for gait training
(Sulzer, 2009); AKROD, a knee orthosis with an
electro-rheological fluid (ERF) variable damper
(Weinberg, 2007); the knee-ankle foot orthosis
developed at the Vrije Universiteit Brussel, driven
by pleated pneumatic artificial muscles (Beyl, 2010).
Among the many bilateral orthoses we can
mention: LOPES, a lower-limb exoskeleton for post-
stroke rehabilitation and driven by series-elastic
actuators (Veneman, 2007); ReWalk, a bilateral
robotic suit for the mobility of paraplegic patients
(Argo Medical Technologies, Israel); the Walking
Assistance devices from Honda; HAL, a powered
suit for motion assistance commercialized by
Cyberdyne (Tsukuba, Japan). Relevant for this study
are also the human performance augmenting
exoskeletons for the lower limbs such as: BLEEX
(Kazerooni, 2006), the Sarcos exoskeleton (Sarcos,
US), and the quasi-passive exoskeleton developed at
MIT by Walsh (Walsh, 2007).
In this paper, we introduce the design of a light-
weight exoskeleton for the assistance of hip flexion-
194
Giovacchini F., Fantozzi M., Peroni M., Moisè M., Cempini M., Cortese M., Lefeber D., Carrozza M. and Vitiello N..
A Light-weight Exoskeleton for Hip Flexion-extension Assistance.
DOI: 10.5220/0004663901940198
In Proceedings of the International Congress on Neurotechnology, Electronics and Informatics (RoboAssist-2013), pages 194-198
ISBN: 978-989-8565-80-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
extension. The design of this device embeds two
main innovative solutions. First, it has a novel,
compact and light-weight series-elastic actuation
unit. Second, carbon-fibre linkages embedding
passive degrees of freedom (DoF) are used to ensure
good kinematics compatibility, thus enhancing the
comfort of the human-robot physical interaction.
Finally, in this paper, we also present the results of
the experimental characterization carried out to
assess the performance of the actuation and control
system.
2 METHODS
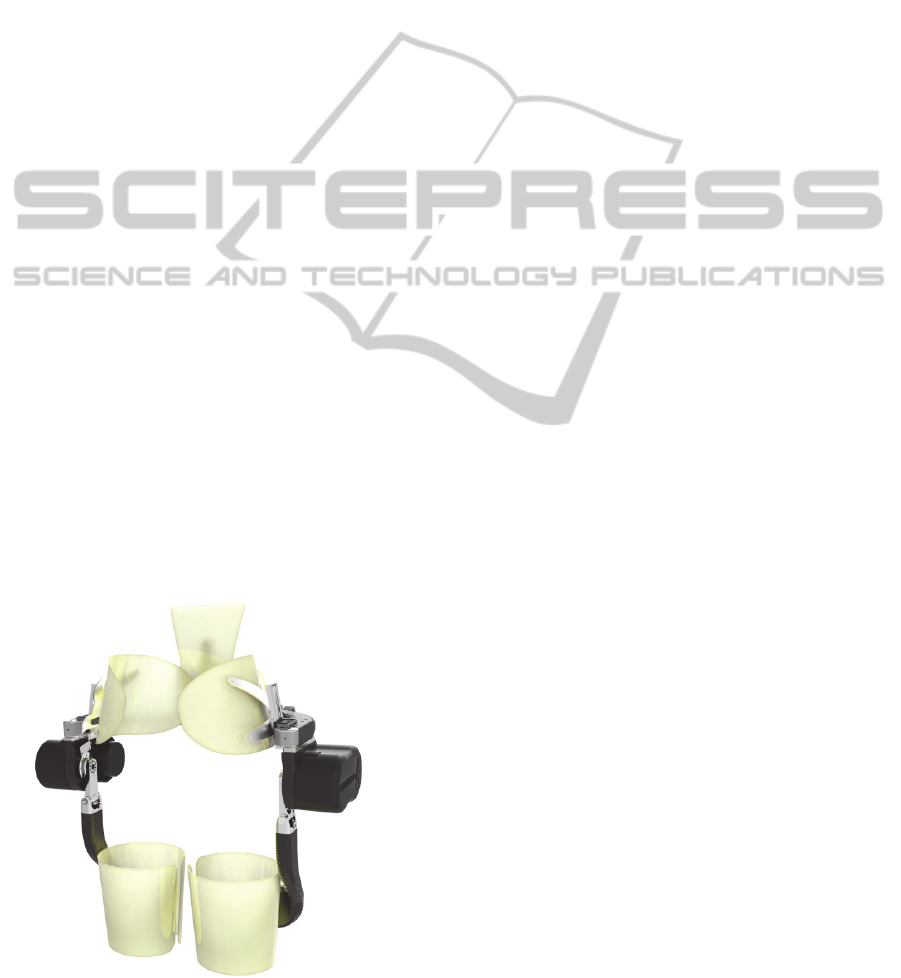
This exoskeleton is conceived for providing torque
to the user's flexion-extension hip joint. It is
constituted (Figure 1) by a frame carrying an
actuation unit and a upper-leg link for each side. The
frame is worn on the user's trunk, and is made up of
an extensible rear bar coupled with two carbon-fibre
lateral arms: it allows a fast don-doff procedure
thanks to a detachable pin and a fine tuning of the
size on medial-lateral direction thanks to a leadscrew
driven adjustment. Two thermoformed orthotic
shells (customized on the user’s body) interface the
frame with the user's trunk ensuring a comfortable
wearing and avoid slippage during the application of
the assistive torque. Two straps allow portion of the
structure’s weight to be supported by the shoulders,
avoiding excessive pressure on the wearer's trunk.
The two actuation units are mounted on the
frame lateral arms, and their position can be adjusted
in order to align them with the hip flexion-extension
human axes by means of two lockable sliders.
Figure 1: CAD model of the exoskeleton.
Coupled to the actuation axes there are two
carbon-fibre linkages, molded with a shape that
sweeps from the lateral to the back side of the thigh.
The shape of the links allows to swap the two,
connecting the actuation axes with the front side of
the thigh, without compromising the functionality.
This possibility turns useful when it is necessary to
maintain the rear of the thighs free from any
component, for instance to allow the user to sit
without hindrance.
The interface with the thighs is provided by
orthotic shells tightened around the limbs by means
of elastic belts. In order to fit different length of
lower-limbs the vertical position of the plastic shells
is adjustable thanks to lockable sliders. Thigh links
are also endowed with a passive rotational DoF for
abduction-adduction: this joint is located in a distal
position with respect to the flexion-extension joint in
order to let it completely passive and not loaded by
the weight of the actuation unit; this passive axis is
not collocated with the anatomical one, but still
contributes to provide a comfortable interaction.
The entire system has a total weight of 4.2 kg
(this weight excludes the control unit which is still
remotely located in this prototype).
2.1 Actuation Units
The actuation units are two Series Elastic Actuators
(SEA) (Pratt and Williamson, 1995). SEAs have
been successfully applied in the field of wearable
powered robots mostly to solve safety issues and
reduce the inherent output impedance (Vitiello,
2013); (Veneman, 2006); (Zinn, 2004). In this case,
the actuation is not rigid and allows relatively low
joint impedance across the entire frequency
spectrum. Furthermore, variations in the output
impedance can still be achieved by means of closed-
loop interaction control strategies (Pratt, 1995).
The design for the actuation units took into
account hip angle and torque profiles given by
Winter dataset, considering the natural cadence of
105 steps/min and a user weight of 80 kg (Winter,
2009). The target amount of assistance was set at
50% of the human torque during level walking and
the maximum value of assistive torque was set at 35
N·m.
A customized torsional spring was developed to
achieve a stiffness of 100 N·m·rad
-1
, which is a
value comparable with the average stiffness of the
human hip during level walking (Walsh, 2007): this
value prevents the subject from an uncomfortable (or
even painful) interaction with an excessively stiff
device in case of high frequency movements
ALight-weightExoskeletonforHipFlexion-extensionAssistance
195
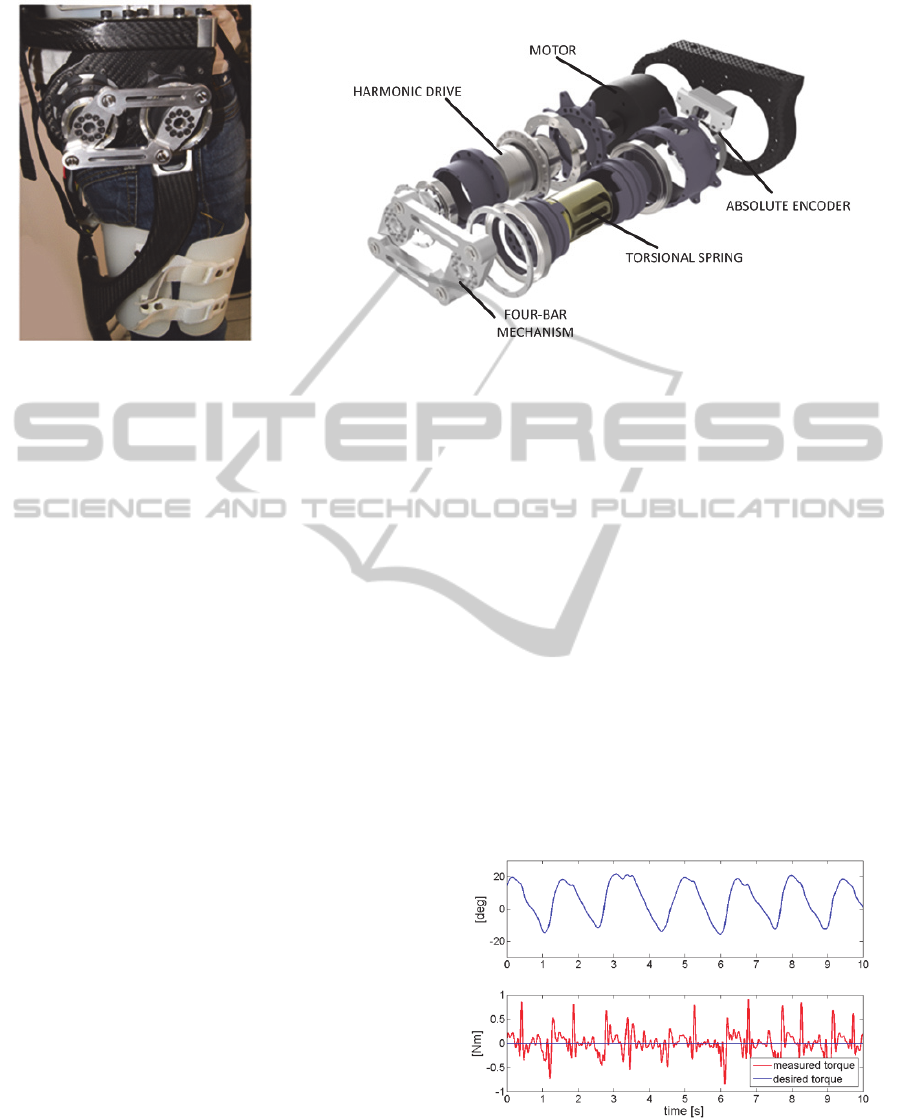
(a) (b)
Figure 2: Lateral view (a) and exploded view (b) of the actuation unit.
(e.g. spasms, interaction with the ground). The same
spring was used for the actuation of the elbow
exoskeleton (NEUROExos) developed at The
Biorobotics Institute (Cempini, 2013: see the
reference for details on the torsional spring).
Each actuation unit (Figure 2) is configured
around two parallel axes. On one axis there is a DC
motor (Maxon Motor® EC60, 100W) equipped with
an incremental encoder and coupled with a
Harmonic Drive (Harmonic Drive® CPL-17A-080-
2A). On the other axis (which is the actual hip joint
axis) there is the torsional spring in series with a 32-
bit absolute encoder (Renishaw® RESOLUTE™,
ring: RESA30USA052B, readhead:
RA32BAA052B30F), which actually measures the
hip joint angle. The transmission between two
parallel axes is obtained by means of a 4-bar
mechanism. This configuration was chosen in order
to have a small lateral encumbrance, however the
swinging of the arms could be not as natural as
desired. In order to overcome this limitation in the
next version of the exoskeleton the actuation units
will be placed on the rear part of the support frame.
2.2 Control
The control system runs on a real-time controller, a
cRIO9082 (National Instruments, Austin, Texas,
US), endowed with a 1.33 GHz dual-core processor
running a NI real-time operating system and a Field
programmable gate array (FPGA) processor Spartan-
6 LX150. Motor velocity is controlled by means of a
commercial servo (Maxon EPOS2 70/10). On top of
the velocity control, a closed-loop 2-pole-2-zero
control is used to control the joint torque. Joint
torque is estimated by measuring the deformation of
the torsional spring by means of the two encoders.
3 RESULTS
Initial experiments were carried out to assess the
performance of the torque control, and the usability
of the device under a zero-torque control mode, i.e.
with the device controlled to be as transparent as
possible. Experiments showed that the torque control
– when a healthy subject displaces the exoskeleton
joint over a frequency range of 0.3-1.5 Hz – has a
parasitic stiffness ranging from 1 to 10 N·m·rad
-1
.
Furthermore, experiments with a subject walking
with the exoskeleton on the treadmill showed that
the passive DoFs allow a comfortable interaction:
the parasitic interaction torque at a cadence of about
0.7 cycle/s was in the range ±1 N·m (Figure 3).
Figure 3: Joint angle profile in zero-torque control mode.
Top panel: right hip joint angle vs. time; down panel:
measured vs. desired torque.
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
196

Figure 4: A subject wearing the exoskeleton.
4 DISCUSSION
Recorded data and feedback from subjects (Figure 4)
that tested the device showed promising
performance for the developed exoskeleton and
encourage to progress with a more extensive
experimental characterization. The target users for
the presented exoskeleton will be elderly people that
need assistance to recover a more stable gait pattern;
in addiction the device is addressed to reduce the
metabolic consumption in lower-limb transfemoral
amputees providing them with assistance during
walking and other tasks. In general several kinds of
patients affected by gait disorders could take
advantages from the presented device.
ACKNOWLEDGEMENTS
This work was supported in part by the EU within
the CYBERLEGs project (FP7-ICT-2011-2.1 Grant
Agreement #287894) and by Fondazione Pisa within
the IUVO project (prog. 154/11).
REFERENCES
Banala, S. K., Agrawal, S. K., Fattah, A. et al., 2006.
Gravity-Balancing Leg Orthosis and Its Performance
Evaluation, IEEE Transactions on Robotics,
22(6):1228-1239.
Beyl, P., Van Damme, M., Van Ham, R., et al., 2010.
Design and control of a lower limb exoskeleton for
robot-assisted gait training. Applied Bionics and
Biomechanics, 6(2):229 – 243.
Burge, R., Dawson-Hughes, B., Solomon, D. H., et al.,
2007. Incidence and Economic Burden of
Osteoporosis-Related Fractures in the United States,
2005–2025. Journal of Bone and Mineral Research,
22: 465–475.
Cempini, M., Giovacchini, F., Vitiello, N., et al., 2013.
NEUROExos: A Powered Elbow Orthosis for Post-
Stroke Early Neurorehabilitation. In Proceedings of
35th Annual International Conference of the IEEE
EMBS, 342-345.
Dollar, A., Herr, H., 2008. Lower extremity exoskeletons
and active orthoses: challenges and state-of-the-art.
IEEE Transactions on Robotics, 24(1):144 158.
Kazerooni, H., Steger, R., 2006. The Berkeley Lower
Extremity Exoskeleton. Journal of Dynamic Systems,
Measurement and Control, 128(1):14-25.
Pons, J. L, 2010. Rehabilitation Exoskeletal Robotics.
IEEE Engineering in Medicine and Biology Magazine,
29(3): 57-63.
Pratt, G., Williamson, M. M., 1995. Series elastic
actuators. In Proc. IEEE Int. Conf. Intell. Robots Syst.,
Pittsburgh, PA, 339–406.
Ronsse, R., Vitiello, N., Lenzi, T., et al., 2011. Human-
robot synchrony: flexible assistance using adaptive
oscillators, IEEE Transactions on Biomedical
Engineering, 58(4):1001-1012.
Ronsse, R., Lenzi, T., Vitiello, N., et al., 2011. Oscillator-
based assistance of cyclical movements: model-based
and model-free approaches, Medical and Biological
Engineering and Computing, 49(10):1173-1185.
Sawicki, G., Gordon, K., Ferris, D., 2005. Powered lower
limb orthoses: applications in motor adaptation and
rehabilitation. In 9th International Conference on
Rehabilitation Robotics, 206-211.
Snijders, A. H., van den Warrenburg, B.P., Giladi, N., et
al., 2007. Neurological gait disorders in elderly
people: clinical approach and classification. Lancet
Neurol., 6(1):63-74.
Stolze, H., Klebe, S., Baecker, C., 2005. Prevalence of gait
disorders in hospitalized neurological patients. Mov
Disord, 20(1): 89–94.
Sulzer, J., Roiz, R., Peshkin, M., et al., 2009. A Highly
Backdrivable, Lightweight Knee Actuator for
Investigating Gait in Stroke. IEEE Transactions on
Robotics, 25(3):539-548.
Verghese, J., Levalley, A., Hall, C. B., et al., 2006.
Epidemiology of gait disorders in community-residing
older adults. J Am Geriatr Soc, 54: 255–261.
Walsh, C. J., Endo, K., Herr, H., 2007. A quasi-passive
Legacy Exoskeleton for load-carrying augmentation.
International Journal of Humanoid Robotics,
4(3):487-506.
Weinberg, B., Nikitczuk, J., Patel, S., et al., 2007. Design,
Control and Human Testing of an Active Knee
Rehabilitation Orthotic Device. In Proceedings of
IEEE International Conference on Robotics and
Automation, 4126-4133.
Wilson, R. S., Schneider, J. A., Beckett, L. A., et al., 2002.
Progression of gait disorder and rigidity and risk of
death in older persons. Neurology, 58: 1815–1819.
Winter D. A., 2009. Biomechanics and Motor Control of
ALight-weightExoskeletonforHipFlexion-extensionAssistance
197

Human Movement, 4th ed.: Wiley.
Veneman, J. F., Ekkelenkamp, R. Kruidhof, R., et al.,
2006. A series elastic- and Bowden-cable-based
actuation of use torque actuator in exoskeleton-type
robots, Int. J. Robot. Res., vol. 25, no. 3, pp. 261–281.
Vitiello, N., Lenzi, T., Roccella, S., et al., 2013.
NEUROExos: A Powered Elbow Exoskeleton for
Physical Rehabilitation, IEEE Transactions on
Robotics, vol. 29(1): 220-235,
Veneman, J. F., Kruidhof, R., Hekman, E. E. G., et al.,
2007. Design and Evaluation of the LOPES
Exoskeleton Robot for Interactive Gait Rehabilitation.
IEEE Transactions on Neural Systems and
Rehabilitation Engineering, 15(3):379-386.
Zinn, M., Roth, B., Khatib, O., et al., 2004. A new
actuation approach for human-friendly robot design.
Int. J. Robot. Res., vol. 23,no. 4–5, pp. 379–398.
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
198
