
Temporally Consistent Snow Cover Estimation from Noisy, Irregularly
Sampled Measurements
Dominic R
¨
ufenacht
1
, Matthew Brown
2
, Jan Beutel
3
and Sabine S
¨
usstrunk
1
1
School of Computer and Communication Sciences, EPFL, Lausanne, Switzerland
2
Department of Computer Science, University of Bath, Bath, U.K.
3
Computer Engineering and Networks Lab, ETH Zurich, Zurich, Switzerland
Keywords:
Surface Classification, Gaussian Mixture Models of Color, Markov Random Fields.
Abstract:
We propose a method for accurate and temporally consistent surface classification in the presence of noisy,
irregularly sampled measurements, and apply it to the estimation of snow coverage over time. The input
imagery is extremely challenging, with large variations in lighting and weather distorting the measurements.
Initial snow cover estimations are obtained using a Gaussian Mixture Model of color. To achieve a temporally
consistent snow cover estimation, we use a Markov Random Field that penalizes rapid fluctuations in the snow
state, and show that the penalty term needs to be quite large, resulting in slow reactivity to changes. We thus
propose a classifier to separate good from uninformative images, which allows to use a smaller penalty term.
We show that the incorporation of domain knowledge to discard uninformative images leads to better reactivity
to changes in snow coverage as well as more accurate snow cover estimations.
1 INTRODUCTION
PermaSense is a joint computer science and geo-
science project. It aims to develop a distributed wire-
less sensor network (WSN) that can be used in ex-
treme environmental conditions in order to measure
permafrost related parameters (Hasler et al., 2008).
To supplement physical measurements, such as tem-
perature profiles, pressure, and crack dilatation, a dig-
ital camera has been adapted for remote operation in
the harsh weather conditions of high-alpine locations
(Keller et al., 2009a; Keller et al., 2009b). This allows
to “measure” the amount of snow coverage, which
is relevant since snow acts as an insulating layer and
hence influences permafrost thawing.
As part of this project, we develop a method to com-
pute temporally consistent snow cover maps for im-
ages taken with this camera. The challenge is that
because the camera is exposed to extreme weather
conditions, we get a highly irregular and noisy sam-
pling of the snow coverage. While the camera is pro-
grammed to take hourly captures, many of the images
are noisy or uninformative because of precipitation
(snow, rain, fog) on the lens, which can cover up large
portions of the scene. The sampling is highly irregu-
lar because many images are either taken at night or
not taken at all because the camera is out of battery.
We use a Gaussian Mixture Model (GMM) of color
for initial snow cover estimations, and formulate an
energy minimization problem that penalizes fast fluc-
tuations in the snow state to achieve temporally con-
sistent results. The key contributions of this paper are:
• A robust algorithm for snow segmentation in chal-
lenging real-world time-lapse data;
• An extension of the Gaussian Mixture Markov
Random Field (GMMRF) model to classify be-
tween a Gaussian foreground and a mixture-of-
Gaussian background class;
• A demo that our Markov Random Field (MRF)
prior leads to better inference than baseline filter-
ing (median/averaging), with an overall accuracy
of 88% on our ground truth set.
The rest of the paper is organized as follows. Section
2 presents work that is related to our problem. In Sec-
tion 3, we show how single image snow segmentation
has been implemented using GMMs of color. Section
4 highlights the particularities of the image database,
and explains how we separate good from uninforma-
tive images. In Section 5, we explain how we include
spatio-temporal information in order to achieve tem-
porally consistent snow cover estimations. We show
and discuss our results in Section 6, and conclude the
work in Section 7.
275
Rüfenacht D., Brown M., Beutel J. and Süsstrunk S..
Temporally Consistent Snow Cover Estimation from Noisy, Irregularly Sampled Measurements.
DOI: 10.5220/0004657202750283
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 275-283
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2 RELATED WORK
Bad weather is not necessarily bad for image un-
derstanding. For example, (Nayar and Narasimhan,
1999) show that haze can be helpful to aid depth per-
ception. In our case, however, the harsh weather con-
ditions not only change the appearance of the scene,
but alter the imaging system (e.g., precipitation on
lens, no power to take pictures, etc).
There is previous research that aims to extract infor-
mation from time-lapse videos of outdoor scenes with
varying illumination and weather conditions. (Ja-
cobs et al., 2007) show that the second order statistics
of a large database of webcam images can be used
to characterise surface orientation, weather, and sea-
sonal change. (Breitenstein et al., 2009) use time-
lapse data captured by static webcams with low or
varying framerate for unusual scene detection. By
defining anything that has been observed in the past
as “usual”, they are able to detect changes in illu-
mination and weather conditions. In contrast to our
dataset, both methods work with imagery that is not
distorted by precipitation on the lens, and thus less
noisy. Also, none of these datasets is as irregularly
sampled as ours.
The problem of creating spatio-temporally consistent
scene labellings or classifications from noisy esti-
mates has arisen in various other domains of video
processing. In (Khoshabeh et al., 2011), a stereo
video disparity estimation method is proposed where
initial disparity estimates are treated as a space-time
volume. In order to reduce computational complex-
ity, the authors handle spatial and temporal consis-
tency separately, by setting up a l
1
-normed mini-
mization with a total variation regularization problem.
(Floros and Leibe, 2012) propose a Conditional Ran-
dom Field (CRF) formulation for the semantic scene
labelling problem which is able to achieve temporal
consistency. They use 3D scene reconstruction in or-
der to temporally couple individual image segmenta-
tions. Both (Khoshabeh et al., 2011) and (Floros and
Leibe, 2012) use controlled imaging conditions, with-
out large changes in illumination, weather, and exter-
nal factors such as precipitation on the lens. Com-
pared to these methods, our approach needs an in-
creased level of robustness.
(Blake et al., 2004) present an interactive back-
ground/foreground image segmentation method us-
ing a Gaussian Mixture Markov Random Field
(GMMRF). They propose a novel pseudo-likelihood
algorithm that jointly learns the Gaussian color mix-
tures and the coherence parameters separately for
foreground and background. Our work can be seen
as an extension of the GMMRF. Instead of inferring
the labels of a single mixture, we formulate a 2-class
problem with a single Gaussian over one class, and a
Gaussian mixture over the other.
3 SINGLE IMAGE
SEGMENTATION
Due to various reasons (e.g., varying illumination,
wrong white balancing, cast shadows), segmenting
snow is not as easy as it may seem. A more sophisti-
cated approach than simple thresholding is needed to
get a proper snow segmentation. We use a GMM of
color to compute the probability of a pixel belonging
to a specific class (snow or not snow), rather than a
hard assignment such as one would obtain by using
k-means (MacQueen, 1967). Unless otherwise men-
tioned, we denote the observed value or observation,
i.e. the intensity value of a pixel, by the variable z.
The binary variable x represents the snow state, where
x = 1 stands for snow and x = 0 for not snow. We de-
fine the following likelihoods:
p(z|x = 1) = N (z; µ
s
, Σ
s
)
1
(1)
p(z|x = 0) =
∑
c
p
c
·N (z; µ
c
, Σ
c
). (2)
Equation (1) is a single Gaussian representing the
likelihood of snow, and Equation (2) is a mixture of c
Gaussians accounting for the likelihood of not snow.
The probability of an observation z can be expressed
as:
p(z) =
Z
p(z|x)p(x)dx =
1
∑
i=0
p(z|x = i)p(x = i)
= p
s
·N (z; µ
s
, Σ
s
) +
∑
c
p
c
·N (z; µ
c
, Σ
c
),
(3)
where p
s
is the prior of snow, and
∑
c
p
c
= 1 −p
s
is the
prior of not snow. By defining p
s
+
∑
c
p
c
=
∑
c
0
p
c
0
= 1,
Equation (3) can be written as:
p(z) =
∑
c
0
p
c
0
·N (z; µ
c
0
, Σ
c
0
), (4)
which is a mixture of |c
0
| = |c|+ 1 Gaussians. We
fit a mixture of Gaussians to z, and then infer µ
s
and
Σ
s
from the maximum luminance component. Using
Bayes formula, we can infer the probability of snow
given the data we observe:
p(x = 1|z) =
p(z|x = 1) ·p
s
p(z|x = 1) ·p
s
+ p(z|x = 0)
. (5)
1
N (x;µ, Σ) =
1
(2π)
n
2
(|Σ|)
1
2
exp(−
1
2
(x −µ)
T
Σ
−1
(x −µ))
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
276

The Bayes classifier we use is, after simplification:
x =
1 p(x = 1|z) > 0.5
0 otherwise
. (6)
4 THE IMAGE DATABASE
The PermaSense image database we used contains
captures of the Matterhorn that were taken between
November 2009 and June 2010 (Keller et al., 2009a;
Keller et al., 2009b). Figure 1 shows typical images
present in the database. Ideally, the camera should
(a) Clear day (b) Overcast (c) Wrong WB
(d) Sunrise (e) Snowfall (f) Dark
(g) Fog (h) Ice on lens (i) Lens flare
Figure 1: Images representing the variety of the image
database. All are in our manually labelled ground truth set.
take hourly captures, but since it is powered using
solar panels and there are long periods without sun-
shine, at times the camera cannot operate. In fact,
only around 2500 images are present in the database,
which is about 50% of the images that should have
been taken on an hourly basis. Figure 2 shows the av-
erage number of images per week. One can see the
Figure 2: Average number of samples per week.
big variations in the number of images taken. There
are even weeks where there is no image taken at all,
such as in the first week of April 2010.
4.1 Splitting Up the Data
In the following, we denote L(m, n) the intensity value
of pixel (m, n) of an image L.
2
Images that are too
dark, such as the one in Figure 1(f), are not suited
for the GMM of color. We exclude all images whose
mean intensity value L is below 0.2, i.e. L < 0.2, and
refer to this reduced dataset as daytime images.
Using domain knowledge, we are able to identify
types of images in the dataset that systematically give
wrong snow cover estimations. Our classifier used to
select the good (informative) images from all daylight
images is based on the following two observations:
• Blurry Images: Snow cover maps we obtain for
images that are blurry (i.e., because of fog, see
Figure 1(g)) are most often wrong. We apply a
Gaussian low-pass filter on L to get L
low
. The
high-frequency components of L are then simply
L
high
= L −L
low
. We define a sharpness index s
by the following ratio:
s =
∑
m
∑
n
|L
high
(m, n)|
2
∑
m
∑
n
|L
low
(m, n)|
2
. (7)
Since we want to drive our model using good im-
ages, it is less acceptable to have false-positives
than false-negatives. We manually tagged 250
good and 250 uninformative images, and then
set the threshold on s such that we have a false-
positive rate of less than 1%. Figure 3 shows the
histogram for the sharpness index computed for
the selected 250 good and 250 uninformative im-
ages. The green vertical line at s = 0.0289 indi-
2
z = L(m, n)
TemporallyConsistentSnowCoverEstimationfromNoisy,IrregularlySampledMeasurements
277

cates where the above condition was satisfied. We
therefore exclude all images where s < 0.0289.
Figure 3: Histogram of the sharpness indexes computed for
the 250 good (red) and the 250 uninformative (blue) im-
ages. The green vertical line shows the smallest value of
the sharpness index such that there are less than 1% false-
positives.
• Sunny Images: In images taken on a sunny day,
the rock in the middle casts a big shadow onto the
snow, as can be seen in Figure 1(a). This results
in the fact that the shadowed pixels are no longer
detected as snow. We found that these images can
be quite well excluded by imposing a threshold on
the minimum of the negative snow likelihoods:
min
i
−log p(z
i
|x
i
= 1) < T
1
. (8)
In our case, T
1
= −5 allowed to best discriminate
between good and uninformative images.
After discarding the images labelled as uninformative
(728 dark, 766 blurry, 358 sunny images), we are left
with 659 good images. Note that 2396 of the 2491
images present in the image database were classified
correctly, giving an overall classification correctness
of 96.2%. The false-positive rate on all images is
1.8%. It is worth noting that “foggy” and “sunny”
images could give more information about the scene
(e.g., cues for 3D structure), but this is left for future
work.
5 TEMPORAL CONSISTENCY
We achieve temporal consistency by formulating an
energy minimization problem, which involves the ini-
tial snow cover estimates computed in Section 3 as
well as a penalty term for different assignments. We
also tested weighted average and median filtering for
comparison.
5.1 Markov Random Fields (MRF)
Traditional filtering approaches such as (weighted)
average and median filtering are not sensitive to the
data, they simply smooth it. We therefore used an
MRF, which have a data term and a prior term. In its
general form, an MRF can be written as follows:
p(z, x) =
∏
i
p(z
i
|x
i
) ·
∏
i
∏
j∈N(i)
p(x
i
, x
j
), (9)
where i indexes over all pixels in space and time, and
N(i) is the set of neighbors directly adjacent to pixel
i in space and time dimensions. Taking the log, the
products “simplify” to sums, and we get the following
global energy function we want to minimize:
−log p(z, x) =
∑
i
f
1
(z
i
, x
i
) +
∑
i
∑
j∈N(i)
f
2
(x
i
, x
j
),
(10)
where the data term f
1
(z
i
, x
i
) = −log p(z
i
|x
i
) is the
negative log likelihood, computed using the GMM
of color (see Section 3). For the prior term, we use
a Potts Model f
2
(x
i
, x
j
) = λ
i, j
|x
i
−x
j
|, which can be
seen as a penalty for a change in snow-state in space
or time dimensions. The minimum of the global en-
ergy function in Equation (10) can be efficiently com-
puted using Graph Cuts (Boykov et al., 2001). With
λ
i, j
we set how strong the bond between two neigh-
boring pixels i and j is, which controls the amount of
smoothing in the spatial domain and the number of
snow changes in the temporal domain.
Ideally, one would stack up all the informative images
present in the database and apply Graph Cuts on the
whole block to find the best solution. With the aim of
reducing the memory requirements, we applied Graph
Cuts separately in the spatial and the temporal domain
by only connecting adjacent pixel neighbors in space
and time, respectively. We observed that in order to
get temporally smooth results, it is sufficient to con-
nect each pixel with its neighbors in time, and to apply
Graph Cuts on those time vectors independently.
We denote the resulting image at time instant t
with penalty term λ as H
t
λ
. For comparison, we im-
plemented two traditional filtering approaches.
5.2 Weighted Average Filtering
The Gaussian filtered snow cover map at time instant t
G
t
r
1
,r
2
is computed as follows:
G
t
r
1
,r
2
(m, n) =
r
2
∑
k=−r
2
r
1
∑
i=−r
1
r
1
∑
j=−r
1
w
i, j,k
·L
t+k
(m + i, n + j),
(11)
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
278
w
i, j,k
=
1
2πσ
2
1
1
√
2πσ
2
2
e
−
1
2
i
2
+ j
2
σ
2
1
+
k
2
σ
2
2
, (12)
where r
1
, r
2
∈ Z define the spatial and temporal filter
size, and σ
1
and σ
2
are chosen such that the Gaussian
weights approach zero for i = j = ±r
1
and k = ±r
2
,
respectively.
5.3 Median Filter
The median filter is known to be robust to outliers.
The median filtered snow cover estimation map M
t
r
1
,r
2
is computed as follows:
M
t
r
1
,r
2
(m, n) = med{L
t−r
2
(m −r
1
, n −r
1
), ...,
L
t+r
2
(m + r
1
, n + r
1
)},
(13)
where med{·} denotes the median operator.
6 RESULTS AND DISCUSSION
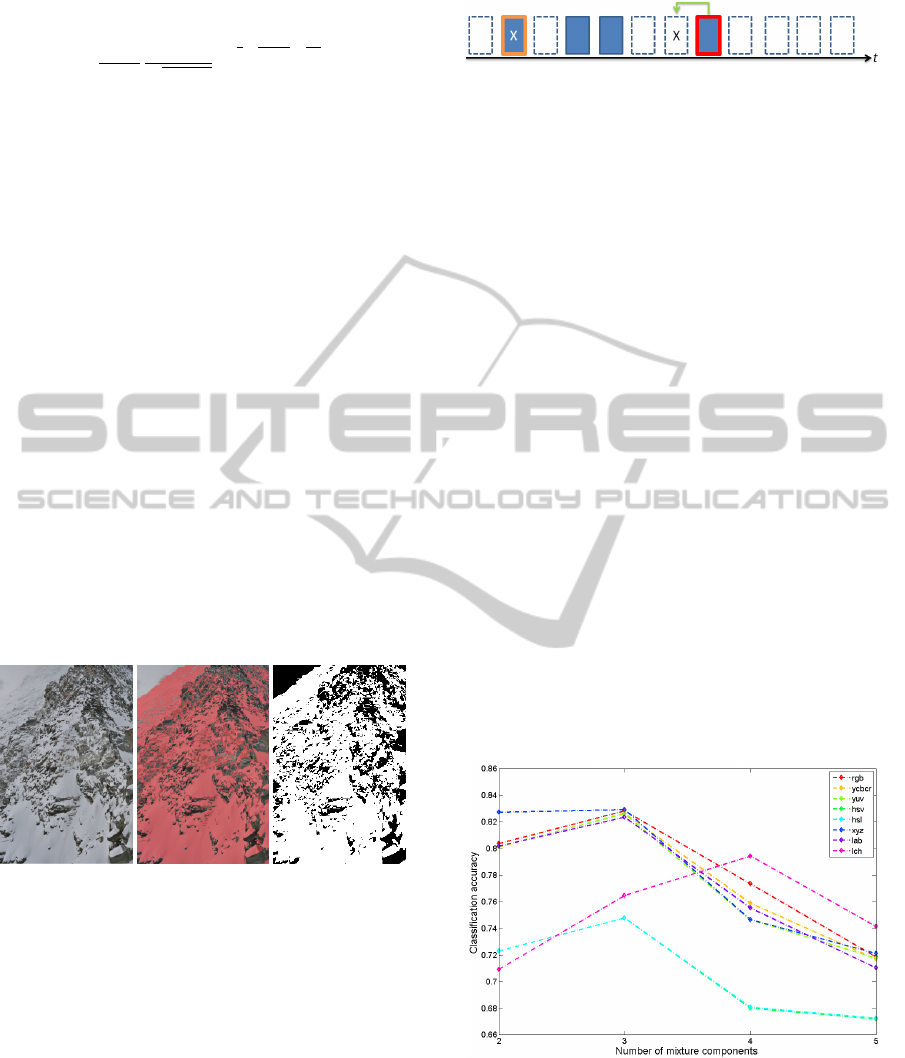
6.1 Ground Truth
We created binary ground truth of 19 images by hand-
labelling pixels using GIMP (see Figure 4). They
(a) Input image (b) Snow pixels
labelled in GIMP
(c) Binary ground
truth map
Figure 4: How the binary maps were created. We created
a new layer in GIMP, where all snow pixels of the input
image (a) were painted in red (b). Every red pixel was then
assigned a “1”, and the rest a “0”, which results in the binary
snow map shown in (c).
represent the variability of the image dataset, sam-
pled over the whole time span of the set. Examples
of images in the ground truth set are shown in Fig-
ure 1, as well as Figure 9. For images where parts
are obstructed, such as Figure 1(e), we used informa-
tion from the nearest unobstructed neighbors in time
to get as close as possible to the true amount of snow
coverage. We compare the ground truth on a pixel-
by-pixel basis with the resulting snow cover maps of
Figure 5: Dashed rectangles represent all images in the
database, “X” marks a ground truth image, filled rectangles
are computed snow cover estimates. Maps are compared
pixel-wise (orange rectangle). If the estimate for a ground
truth does not exist, we select the one closest in time (red
rectangle).
the different methods. As we exclude certain images,
it can happen that we do not have an estimate at the
time instant of the ground truth image (e.g., only 7 out
of the 19 ground truth images were labelled as good
images). In order to compute the classification cor-
rectness, we thus took the snow cover map closest in
time (see Figure 5).
6.2 Finding the Best Parameters for
GMM of Color
Being a parametric model, the GMM has several pa-
rameters one can optimize. We tested several combi-
nations of number of mixture components, as well as
type of covariance matrix Σ (spherical and full). We
also transformed the images to the most relevant color
spaces before applying the GMM of color. We found
that the results were generally better using a spherical
covariance matrix. Figure 6 shows the accuracy ob-
tained for different combinations of number of mix-
ture components and color spaces using a spherical
covariance matrix.
Figure 6: Results for different color spaces and number of
mixture components, using a spherical covariance matrix.
We can see that with the exception of the Lch
color space, best results are always obtained for three
mixture components. When it comes to selecting the
color space, we can see that XYZ slightly outperforms
the standard sRGB color space, as well as the oppo-
TemporallyConsistentSnowCoverEstimationfromNoisy,IrregularlySampledMeasurements
279
nent color spaces we tested. The accuracy for HSV
and HSL is almost 10% lower than for the other color
spaces, so these two are not well suited for snow seg-
mentation.
6.3 Filtering Parameters
Our goal is to obtain an accurate, temporally con-
sistent estimation of snow coverage. There are dif-
ferent reasons why snow cover estimations based on
single images are inaccurate. As mentioned in Sec-
tion 4, quite a lot of the images are corrupted by
external factors, which influence the quality of our
snow classification using a GMM of color: Shad-
ows cast on snow results in the fact that these regions
are wrongly classified as “not snow”, reflections of
the sunlight on (wet) stone makes those regions very
bright, and hence they are misclassified as “snow”
(see Figure 9(d)). Even more problematic is precipita-
tion on the lens, as well as foggy weather, which leads
to large parts of the image that are misclassified. To
a smaller extent, there might also be misclassification
due to sensor noise. We investigated various combi-
nations of spatial and temporal filter lengths for both
the weighted average and the median filter, as well as
different weights for the MRF.
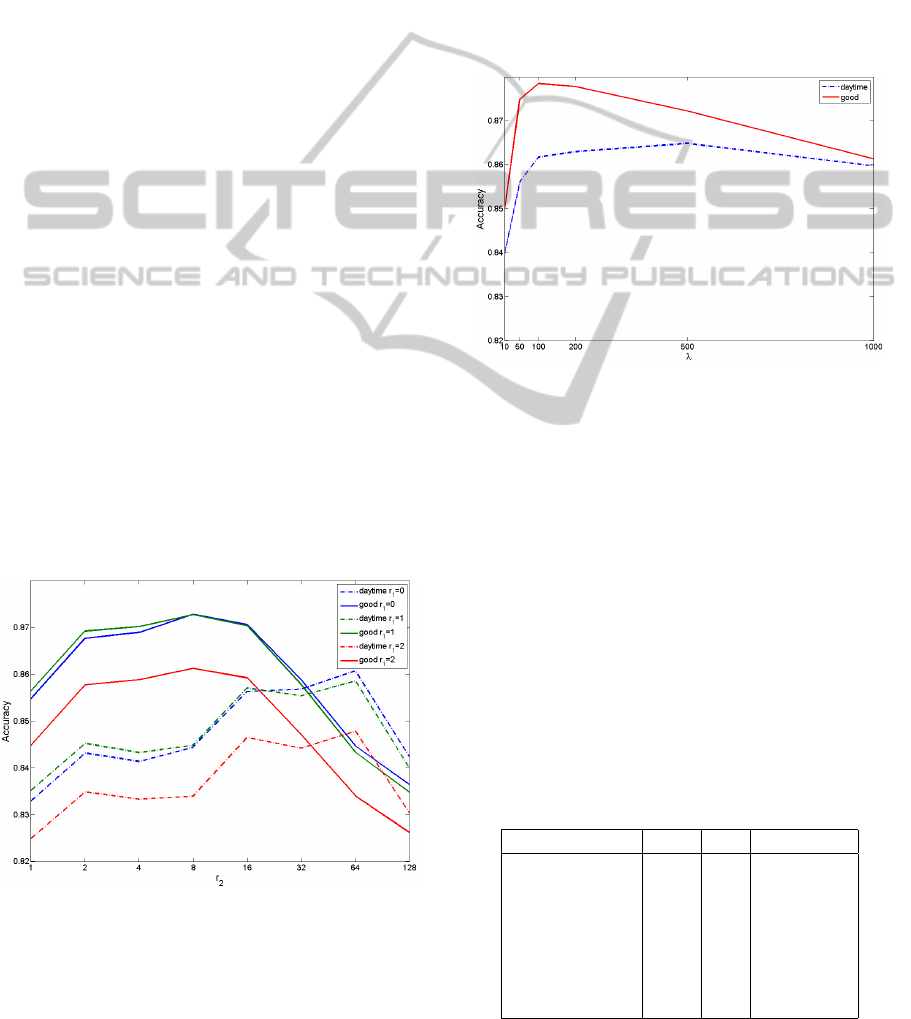
Median Filter. Since the median filter generally
gave better results than the weighted average ap-
proach, we show the accuracy obtained for various
combinations of spatial and temporal filter sizes for
the median filter (see Figure 7). Note that the tem-
poral half filter length r
1
was increased by factors of
2.
Figure 7: Results for different combinations of spatial and
temporal filter sizes using median filter, for both the daytime
and the good image set.
The best results are obtained using only the good
images. We can see that the filter size can be reduced
by a factor of 8 as compared to the daytime images
(from 64 to 8), since there are fewer wrong snow esti-
mates. This allows the filter to faster adapt to changes.
We also see that the results drop by more than 1% for
a spatial filter size r
2
= 2 as compared to smaller fil-
ter sizes. We found that r
2
= 1 resulted in slightly
more temporal consistent results, which is why we set
r
2
= 1.
MRF. As mentioned before, the MRF was only ap-
plied in the temporal domain because of computa-
tional complexity and memory requirements. Figure
8 shows the results for various weights λ:
Figure 8: Results for different weights using for the MRF,
for both the daytime and the good image set.
As with the median filter, the results are consis-
tently better when using only the good images. The
weight λ can be set lower, which results in better re-
activity to changes in snow coverage. This justifies
the exclusion of uninformative images.
6.4 Comparison of the Methods
Table 1 summarizes the best results obtained for each
method on our ground truth set, both for all daytime
images, as well as for the good images only.
Table 1: Overall classification correctness (C), standard de-
viation (σ), and reactivity to changes in snow coverage (R)
on 19 images, for the Gaussian Mixture Model (GMM),
weighted average (WA), median (Med), and Markov Ran-
dom Field (MRF), using the daytime or the good
†
images.
Method C σ R
GMM of color 83.3 8.7 immediate
WA 85.6 7.3 slow
Med 86.1 6.9 slow
MRF 86.5 6.6 fast
WA
†
86.5 7.6 slow
Med
†
87.2 6.8 fast
MRF
†
87.9 6.1 very fast
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
280
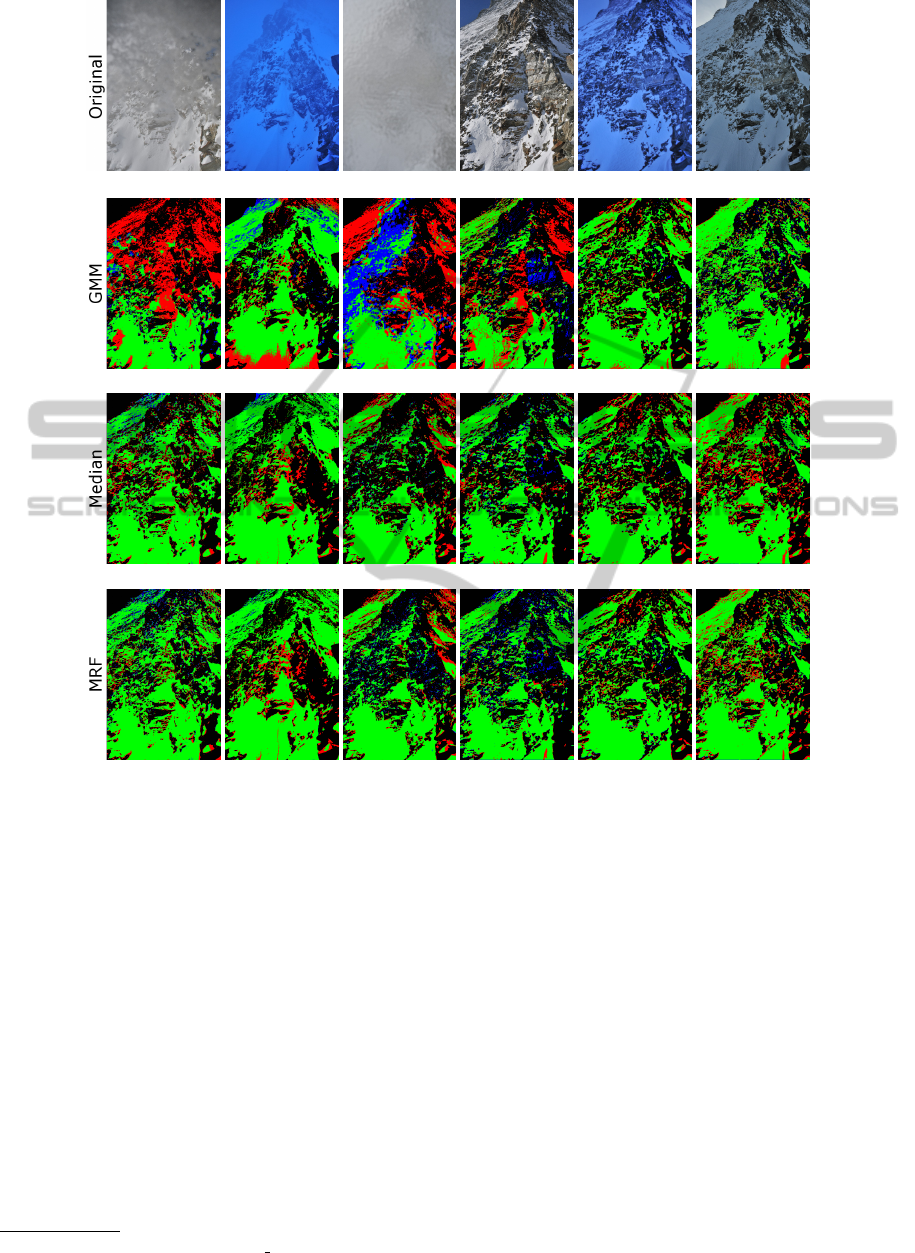
(a) 10.11.2009 (b) 09.05.2010 (c) 01.12.2009 (d) 15.02.2010 (e) 03.12.2009 (f) 02.03.2010
69.4% 83.1% 61.4% 77.9% 90.1% 89.6%
88.0% 89.4% 88.4% 90.9% 90.0% 85.5%
89.1% 90.1% 88.6% 89.4% 90.1% 86.9%
Figure 9: Comparison of the methods. Green are the true positives, blue the false positives, red the false negatives, and black
the true negatives. First row are the originals, second row the results of the GMM of color. Rows three and four show the
results obtained for the median filtering approach M
t
1,8
and the MRF H
t
100
, respectively.
The reactivity to changes in snow coverage as well
as the temporal smoothness were subjectively evalu-
ated by watching a time lapse video. The videos can
be found on our web page
3
. One can see the trend that
the results are better for the good images, irrespective
of the method used to achieve temporal consistency.
Figure 9 shows results obtained on the good images.
Images (a)–(c) are examples where the temporal in-
formation can significantly improve the classification
accuracy, because the images are distorted. Image (d)
is interesting because it shows how the GMM of color
is fooled by shadows (upper right side), as well as
illuminated rock (center right part), which are both
misclassified. Again, one can see how the results im-
prove by incorporating information from neighboring
3
http://ivrg.epfl.ch/research/snow segmentation/
images in time. Images (e) and (f) both give reason-
able results using the GMM of color. In fact, using
temporal information slightly deteriorates the accu-
racy of the snow maps, because the snow coverage
is different in neighboring images. The MRF gives
slightly better results than the median filter approach,
because it is able to faster adapt.
Not only the classification correctness is the high-
est for the MRF approach, but this method is also tem-
porally smooth and reacts very fast to changes in snow
coverage. This is due to the fact that the MRF is not
just a simple smoothing of the labels, as in the me-
dian filter, but in fact a data-sensitive and temporally
smooth labelling. This is a big advantage of the MRF
over the two basic filtering approaches, as is exempli-
fied in Figure 10, where two consecutive images of
TemporallyConsistentSnowCoverEstimationfromNoisy,IrregularlySampledMeasurements
281

Original L
t
M
t
1,8
H
t
100
Original L
t+1
M
t+1
1,8
H
t+1
100
Figure 10: Crop of two consecutive snow maps, before and
after a major snow fall. (a) and (d) are the originals, (b) and
(e) the median filtered maps M
t
, and (c) and ( f ) the MRF
H
t+1
. The MRF almost completely reacts to the change in
snow coverage.
the database are shown.
The image at instant t (2. February 2010,
11.30am) is the last one taken just before the one at
t + 1 (3. February 2010, 2.26pm). A major snow fall
happened in-between, which explains the important
changes in snow coverage. Note how the median filter
approach is unable to adapt to the changes and under-
estimates the amount of snow coverage at time instant
t + 1, whereas the MRF approach is adapting almost
completely.
7 CONCLUSIONS AND FUTURE
WORK
We propose a technique for robust snow cover estima-
tion from time-lapse imagery. Since many of the im-
ages are uninformative, single image snow segmen-
tation using GMM of color is insufficient to get tem-
porally consistent results. We use Markov Random
Fields (MRF) and formulate the temporal consistency
problem as an energy minimization, where we use a
penalty term to penalize neighboring pixels (spatially
and temporally) with different labels. Due to the na-
ture of the image data, the weight of the penalty term
has to be quite large in order to provide temporally
consistent results. The higher the weight, the less re-
active the model is to changes in snow coverage. Us-
ing domain-knowledge, we propose a classifier to ex-
clude most of the uninformative images. Using only
the good images allows to relax the temporal con-
straints, making the model more reactive to changes.
The proposed model is both robust to outliers as well
as very reactive to changes in snow coverage.
Future work includes attempting the joint optimiza-
tion over space and time of Equation (10), and the
implementation of a snow deposition model, which
would be useful for long periods of uninformative
and/or missing images. This model could be used in-
stead of the zero-order hold we applied, resulting in
smoother transitions between two good images. An-
other interesting path to follow is to have different
models for different weather states, which could help
improve the initial snow cover estimations.
ACKNOWLEDGEMENTS
This work is in part supported by the National Com-
petence Center in Research on Mobile Information
and Communication Systems (NCCR-MICS), a cen-
ter supported by the Swiss National Science Founda-
tion under grant number 5005-67322.
REFERENCES
Blake, A., Rother, C., Brown, M., Perez, P., and Torr, P.
(2004). Interactive image segmentation using an adap-
tive GMMRF model. European Conference on Com-
puter Vision (ECCV), pages 428–441.
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast ap-
proximate energy minimization via graph cuts. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 23(11):1222–1239.
Breitenstein, M. D., Grabner, H., and Van Gool, L. (2009).
Hunting Nessie - Real-Time Abnormality Detection
from Webcams. IEEE International Conference on
Computer Vision (ICCV), pages 1243–1250.
Floros, G. and Leibe, B. (2012). Joint 2D-3D temporally
consistent semantic segmentation of street scenes.
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Hasler, A., Talzi, I., Beutel, J., Tschudin, C., and Gruber,
S. (2008). Wireless sensor networks in permafrost
research-concept, requirements, implementation and
challenges. Proceedings of the 9th International Con-
ference on Permafrost (NICOP).
Jacobs, N., Roman, N., and Pless, R. (2007). Consistent
temporal variations in many outdoor scenes. IEEE
Conference on Computer Vision and Pattern Recog-
nition (CVPR).
Keller, M., Beutel, J., and Thiele, L. (2009a). Demo
Abstract: MountainviewPrecision Image Sensing on
High-Alpine Locations. Adjunct Proceedings of the
6th European Workshop on Sensor Networks (EWSN),
pages 15–16.
Keller, M., Y
¨
ucel, M., and Beutel, J. (2009b). High-
Resolution Imaging for Environmental Monitoring
Applications. Proc. International Snow Science Work-
shop, pages 197–201.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
282

Khoshabeh, R., Chan, S. H., and Nguyen, T. Q. (2011).
Spatio-temporal consistency in video disparity estima-
tion. In IEEE International Conference on Acoustics,
Speech and Signal Processing (ICASSP), pages 885–
888.
MacQueen, J. (1967). Some methods for classification and
analysis of multivariate observations. Proceedings of
the fifth Berkeley symposium on Mathematical Statis-
tics and Probability, pages 281–297.
Nayar, S. and Narasimhan, S. (1999). Vision in bad
weather. IEEE International Conference on Computer
Vision (ICCV), pages 820–827.
TemporallyConsistentSnowCoverEstimationfromNoisy,IrregularlySampledMeasurements
283
