
Seven Principles to Mine Flexible Behavior from Physiological Signals for
Effective Emotion Recognition and Description in Affective Interactions
Rui Henriques
1
and Ana Paiva
2
1
KDBIO, Inesc-ID, Instituto Superior T
´
ecnico, University of Lisbon, Lisbon, Portugal
2
GAIPS, Inesc-ID, Instituto Superior T
´
ecnico, University of Lisbon, Lisbon, Portugal
Keywords:
Mining Physiological Signals, Measuring Affective Interactions, Emotion Recognition and Description.
Abstract:
Measuring affective interactions using physiological signals has become a critical step to understand engage-
ments with human and artificial agents. However, traditional methods for signal analysis are not yet able
to effectively deal with the differences of responses across individuals and with flexible sequential behav-
ior. In this work, we rely on empirical results to define seven principles for a robust mining of physiological
signals to recognize and characterize affective states. The majority of these principles are novel and driven
from advanced pre-processing techniques and temporal data mining methods. A methodology that integrates
these principles is proposed and validated using electrodermal signals collected during human-to-human and
human-to-robot affective interactions.
1 INTRODUCTION
Monitoring physiological signals is increasingly nec-
essary to derive accurate analysis from affective in-
teractions or to dynamically adapt these interactions.
Although many methods have been proposed for an
emotion-centered analysis of physiological signals
(Jerritta et al., 2011; Wagner et al., 2005), there is still
lacking an integrative view of existing contributions.
Additionally, existing methods suffer from three ma-
jor drawbacks. First, there is no agreement on how to
deal with individual differences and with spontaneous
variations of the signals. Second, they generally rely
on feature-driven models and, therefore, discard flex-
ible sequential behavior of physiological responses.
Finally, experimental conditions and psychophysio-
logical data from users have not been adopted to shape
the classification models.
In this paper, we propose seven principles to guide
the mining of physiological signals for an effective
emotion recognition and characterization. These prin-
ciples were derived from an experimental comparison
of advanced techniques from machine learning and
signal processing using physiological signals, such as
skin activity and temperature, collected during affec-
tive interactions. These principles can be used to ad-
dress the three introduced drawbacks. They provide
an integrated and up-to-date view on how to disclose
and describe affective states from physiological sig-
nals. A methodology that relies on these principles is,
additionally, proposed.
This paper is structured as follows. In Section 2,
relevant work on the mining of sensor-based data in
emotion-centered studies is covered. Section 3 de-
fines the seven principles and the target methodol-
ogy. Section 4 provides the supporting quantitative
evidence for the introduced principles using signals
collected under different experimental settings. Fi-
nally, the main implications are synthesized.
2 BACKGROUND
Physiological signals are increasingly adopted to
monitor and shape affective interactions since they are
hardly prone to masking and can track subtle but sig-
nificant cognitive-sensitive emotional changes. How-
ever, their complex, variable and subjective expres-
sion within and among individuals pose key chal-
lenges for an adequate modeling of emotions.
Consider a set of annotated signals D=(x
1
,..,x
m
),
where each instance is a tuple x
i
=(~y,a
1
,..,a
n
,c) where
~y is the signal, a
i
is an annotation related with the sub-
ject or experimental setting, and c is the labeled emo-
tion or stimulus. Given D, the emotion recognition
task aims learn a model M to label a new unlabeled
instance (~y, a
1
,..,a
n
). Emotion description task aims
to learn a model M that characterizes the major prop-
erties of ~y signal for each emotion c.
75
Henriques R. and Paiva A..
Seven Principles to Mine Flexible Behavior from Physiological Signals for Effective Emotion Recognition and Description in Affective Interactions.
DOI: 10.5220/0004666400750082
In Proceedings of the International Conference on Physiological Computing Systems (PhyCS-2014), pages 75-82
ISBN: 978-989-758-006-2
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

The goal of emotion recognition and description
is to (dynamically) access someone’s feelings from
(streaming) signals. Emotion recognition from phys-
iological signals has been applied in the context of
human-robot interaction (Kulic and Croft, 2007; Leite
et al., 2013), human-computer interaction (Picard
et al., 2001), social interaction (Wagner et al., 2005),
sophisticated virtual adaptive scenarios (Rani et al.,
2006), among others (Jerritta et al., 2011). Multiple
physiological modalities have been adopted depend-
ing on the goal of the task. For instance, electroder-
mal activity has been used to identify engagement and
excitement states, respiratory volume and rate to rec-
ognize negative-valenced emotions, and heat contrac-
tile activity to separate positive-valenced emotions
(Wu et al., 2011). Additionally, the experimental set-
ting of existing studies also vary, namely the prop-
erties of the selected stimuli (discrete vs. continuous)
and general factors related with user dependency (sin-
gle vs. multiple subjects), subjectivity of the stimuli
(high-agreement vs. self-report) and the analysis time
of the signal (static vs. dynamic).
A first drawback of existing emotion-centered
studies is the absence of learned principles to mine
the signals. Although multiple models are compared
using accuracy levels, there is no in-depth analysis of
the underlying behavior of these models and no guar-
antees regarding their statistical significance. Addi-
tionally, there is no assessment on how their perfor-
mance varies for alternative experimental settings.
A second drawback is related with the fact
that these studies rely on simple pre-processing
techniques and feature-driven models. First, pre-
processing steps are centered on the removal of con-
taminations and on simplistic normalization proce-
dures. These techniques are insufficient to deal with
differences on responses among subjects and with the
isolation of spontaneous variations of the signal.
Second, even in the presence of expressive fea-
tures, models are not able to effectively accommodate
flexible sequential behavior. For instance, a rising or
recovering behavior may be described by specific mo-
tifs sensitive to sub-peaks or displaying a logarithmic
decaying. This weak-differentiation among responses
leads to rigid models of emotions.
The task of this work is to identify a set of consis-
tent principles to address these drawbacks, thus im-
proving emotion recognition rates.
3 SOLUTION
Relying on experimental evidence, seven principles
were defined to surpass the limitations of traditional
models for emotion recognition from physiological
signals. The impact of adopting these principles were
validated over electrodermal activity, facial expres-
sion and skin temperature signals. Nevertheless, these
principles can be tested for any other physiological
signal after the neutralization of cyclic behavior (e.g.
respiratory and cardiac signals) and/or the application
of smoothing and low-pass filters.
3.1 The Seven Principles
#1: Adopt Representations able to Handle Individ-
ual Differences of Responses
Problem: The differences of physiological re-
sponses for a single emotion are often related with ex-
perimental conditions, such as the placement of sen-
sors or unregulated environment, and with specific
psychophysiological properties of the subjects, such
as lability and current mood. These undesirable dif-
ferences affect both the: i) amplitude axis (varying
baseline levels and peak-variations of responses), and
the ii) temporal axis (varying latency, rising and re-
covery time of responses).
On one hand, recognition rates degrade as a result
of an increased modeling complexity due to these dif-
ferences. On the other hand, when normalizing sig-
nals along the amplitude-time axes, we are discard-
ing absolute behavior that is often critical to distin-
guish emotions. Additionally, common normalization
procedures are not adequate since the signal baseline
and response amplitude may not be correlated (e.g.
high baseline does not mean heightened elicited re-
sponses).
Solution: A new representation of the signal that
minimizes individual differences should be adopted,
and combined with the original signal for the learning
of the target model.
While many representations for time series ex-
ist (Lin et al., 2003b), they either scale poorly as
the cardinality is not changed or require previous ac-
cess to all the signal preventing a dynamic analysis of
the signal. Symbolic ApproXimation (SAX) satisfies
these requirements and offers a lower-bounding guar-
antee. SAX behavior can be synthesized in two steps.
First, the signal is transformed into a Piecewise Ag-
gregate Approximated (PAA) representation. Second,
the PAA signal is symbolized into a discrete string. A
Gaussian distribution is used to produce symbols with
equiprobability from statistical breakpoints (Lin et al.,
2003a). Unlike other representations, the Gaussian
distribution for amplitude control smooths the prob-
lem of subjects with baseline levels and response vari-
ations not correlated.
Amplitude differences can be corrected with re-
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
76

spect to all stimuli, to a target stimulus, to all subjects,
or to a specific subject. To treat temporal differences,
two strategies can be adopted. First, signals can be
used as-is (with their different numerosity) and given
as input to sequential learners, which are able to deal
with this aspect. Note, for instance, the robustness of
hidden Markov models on detecting hand-writing text
with different sizes in (Bishop, 2006). Second, the
use of piecewise aggregation analysis, such as pro-
vided by SAX, can be used to normalize numerosity
differences.
#2: Account for Relevant Signal Variations
Problem: Motifs and features sensitive to sub-
peaks are critical for emotion recognition (e.g. elec-
trodermal variations hold the potential to separate
anger from fear responses (Andreassi, 2007)). How-
ever, traditional methods rely on fixed amplitude-
thresholds to detect informative signal variations,
which became easily corrupted due to the individual
subject differences. Additionally, when cardinality is
reduced, relevant sub-peaks disappear.
Solution: Two strategies can be adopted. First,
a representation to enhance local variations, referred
as local-angle. The signal is partitioned in thin time-
partitions and the angle associated with the signal
variation for each partition is computed and translated
into symbols based on break-points computed from
the input number of symbols. Similarly to SAX, the
angle break points are also defined assuming a Gaus-
sian distribution. When adopting an 6-dim alphabet,
the following illustrative SAX-based univariate sig-
nal: <17,13,15,14,18,19,16,14,13,12,16,16>, would be
translated into the following local-angle representa-
tion: <0,4,1,5,5,0,1,1,1,5,4>.
Second, multiple SAX representations can be
adopted using different cardinalities. While mapping
the raw signals into low-cardinal signals is useful
to capture smoothed behavior (e.g. alphabet size
less than 8), a map into high-cardinal signals is able
to capture more delineated behavior (e.g. alphabet
size above 10). One model can be learned for
each representation, with the joint probability being
computed to label a response.
#3: Include Flexible Sequential Behavior
Problem: Although sequential learning is the nat-
ural option for audio-and-visual signals, the existing
models for emotion recognition mainly rely on ex-
tracted features. Feature-extraction methods are not
able to capture flexible behavior (e.g. motifs under-
lying complex rising and decaying responses) and are
strongly dependent on directive thresholds (e.g. peak
amplitude to compute frequency measures).
Solution: Generative models learned from se-
quential data, such as recurrent neural networks or dy-
namic Bayesian networks, can be adopted to satisfy
this principle (Bishop, 2006). In particular, hidden
Markov models (HMMs) are an attractive option due
to their stability, simplicity and flexible parameter-
control (Murphy, 2002). The core task is to learn the
generation and transition probabilities of a hidden au-
tomaton for each emotion. Given a non-labeled sig-
nal, we can assess the probability of being generated
by each learned model. An additional exploitation of
the lattices per emotion can be used to retrieve emerg-
ing patterns and, thus, be used as emotion descriptors.
The parameterization of HMMs must be based on
the signal properties (e.g. high dimensionality leads
to an increased number of hidden states). Alternative
architectures, such as fully-interconnected or left-to-
right architectures, can be considered.
From the conducted experiments, an analysis
of the learned emissions from the main path of
left-to-right HMM architectures revealed emerging
rising and recovering responses following sequential
patterns with flexible displays (e.g. exponential and
”stairs”-appearance behavior).
#4: Integrate Sequential and Feature-driven Models
Problem: Since sequential learners capture the
overall behavior of physiological responses, they are
not able to highlight specific discriminative properties
of the signal. Often such discriminative properties are
adequately described by simple features.
Solution: Feature-driven and sequential models
should be integrated as they provide different but
complementary views. One option is to rely on a post-
voting stage. A second option is to use one model to
discriminate the less probable emotions, and to use
such constraints on the remaining model.
Feature-driven models have been widely re-
searched and are centered on three major steps:
feature extraction, feature selection and feature-based
learning (Lessard, 2006; Jerritta et al., 2011). Expres-
sive features include statistical, temporal, frequency
and, more interesting, temporal-frequency metrics
(from geometric analysis, multiscale sample entropy,
sub-band spectra). Feature extraction methods in-
clude tonic-phasic windows; moving-sliding features;
transformations (Fourier, wavelet, Hilbert); compo-
nent analysis; projection pursuit; auto-associative
nets; and self-organizing maps. Methods to remove
features without significant correlation with the
emotion under assessment include sequential selec-
tion, branch-and-bound search, Fisher projection,
Davies-Bouldin index, analysis of variance and some
classifiers. Finally, a wide-variety of deterministic
and probabilistic learners have been adopted to per-
SevenPrinciplestoMineFlexibleBehaviorfromPhysiologicalSignalsforEffectiveEmotionRecognitionandDescription
inAffectiveInteractions
77

form emotion recognition based on relevant features.
The most successful learners are k-nearest neighbors,
regression trees, random forests, Bayesian networks,
support vector machines, canonical correlation and
linear discriminant analysis, neural networks, and
Marquardt-back propagation.
#5: Use subject’s Traits to Shape the Model
Problem: Subjects with different psychophysio-
logical profiles tend to have different physiological re-
sponses for the same stimuli. Modeling responses for
emotions without this prior knowledge hampers the
learning task since the models have to define multiple
paths or generalize responses in order to accommo-
date such alternative expressions of an emotion due
to profile differences.
Solution: Turn the learning sensitive to psycho-
physiological traits of the subject under assessment
when available. We found that the inclusion of the
relative score for the four Myers-Briggs types
1
was
found to increase the accuracy of learning models.
For lazy learners, the simple inclusion of these
traits as features is sufficient. We observed an in-
creased accuracy in k-nearest neighbors, which tends
to select responses from subjects with related profile.
A simple strategy for non-lazy learners is to par-
tition data by traits, and to learn one model for each
trait. Emotion recognition is done by integrating the
results of the models with the profile of the testing
subject. This integration can recur to a weighted vot-
ing scheme, where weights essentially depend on the
score obtained for each assessed trait.
A more robust strategy is to learn a tree structure
with classification models in the leafs, where a
branching decision is associated with trait values that
are correlated with heightened response differences
for a specific emotion.
#6: Refine the Learning Models based on the Com-
plexity of Emotion Expression
Problem: A single emotion-evocative stimulus
can elicit small-to-large groups of significantly differ-
ent physiological responses. A simple generalization
of each set of responses leads to poor models.
Solution: Create multiple sub-models for emo-
tions with varying physiological expressions. Both
rule-based models, such as random forests, and lazy
learners implicitly accommodate this behavior.
Generative models need to be further refined when
the emission probabilities of the underlying lattices
for a specific emotion do not have a strong conver-
gence. When HMMs are adopted, it is crucial to
1
http://www.myersbriggs.org/
change the architecture to add an alternative path with
a new hidden automaton.
For non-generative models, it is crucial to under-
stand when the model needs to be further refined. This
can be done by analyzing the variances of features per
emotion or by clustering responses per emotion with
a non-fixed number of clusters.
Not only these strategies can improve the emo-
tion recognition rates, but also the characterization of
physiological responses per emotion. Consider the
case where the learned HMMs are used as a pattern
descriptor. Without further separation of different ex-
pressions for each emotion, the generative models per
emotion would be more prone to error and only reveal
generic behavior.
#7: Affect the Models to the Conditions of the Ex-
perimental Setting
Problem: the properties of the emotion recogni-
tion task varies with different settings, such as dis-
crete vs. prolonged stimuli, user-dependent vs. inde-
pendent studies, univariate vs. multivariate signals.
Solution: The selection and parameterization of
classification models should be guided by the experi-
mental conditions. Below we introduced three exam-
ples derived from our analysis. First, the influence of
sub-peak analysis (principle #2) for emotion recogni-
tion should have a higher weight for prolonged stim-
uli. Second, user-dependent studies are particularly
well described by flexible sequential behavior (prin-
ciple #3). Third, multivariate analysis should be per-
formed in an integrated fashion whenever possible.
Common generative models, such as HMMs, are able
to model multivariate signals.
Additionally, we found that both the inclusion of
other experimental properties (such as interaction an-
notations) and of the perception of the subject re-
garding the interaction (assessed recurring to post-
surveys) can guide the learning of the target emotion
recognition models.
3.2 Methodology
Relying on the introduced seven principles, we pro-
pose a novel methodology for emotion recognition
and description from physiological signals
2
. Fig.1 il-
lustrates its main steps. Emotion recognition com-
bines the traditional feature-based classification with
the results provided from sequence learners and is
centered on two expressive representations: i) SAX to
normalize individual differences while still preserv-
ing overall response pattern, and on ii) local angles
to enhance the local sub-peaks of a response. Addi-
2
Software in web.ist.utl.pt/rmch/research/software/eda
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
78

Figure 1: Proposed methodology for emotion recognition
and description from physiological signals.
tionally, emotion characterization is accomplished us-
ing both feature-based descriptors (mean and variance
of the most discriminative features) and the transition
lattices generated by sequence learners.
In the presence of background knowledge, that is,
when each instance (~y, a
1
,..,a
n
,c) has n ≥ 1, prior de-
cisions can be made. Exemplifying, in the presence
of psychophysiological traits correlated with varying
expression of a specific emotion, the target model can
be further decomposed to reduce the complexity of
the task. Complementary, iterative refinements over
the learned model can be made when feature-based
models rely on features with high variances or when
the generative models do not have strong convergence
criteria for a specific emotion.
4 RESULTS
The proposed principles and methodology resulted
from an evaluation of advanced data mining and sig-
nal processing concepts using a tightly-controlled lab
study
3
. More than 200 signals were collected for each
physiological modality from both human-to-human
and human-to-robot affective interactions
4
. Electro-
dermal activity (EDA), skin temperature, and facial
expression modalities were monitored using Affectiva
technology. Although the conveyed results are cen-
tered on electrodermal activity and temperature, pre-
vious work from the institute on the use of facial ex-
pression to recognize emotion during affective games
adds supporting evidence to the relevance of the listed
principles (Leite et al., 2013).
3
details, data, scripts and statistical sheets available in
http://web.ist.utl.pt/rmch/research/software/eda
4
30 participants, with ages between 19 and 24 (aver-
age of 21 years old), were randomly divided in two groups,
R and H. Subjects from group R interacted with the NAO
robot (www.aldebaran-robotics.com) using a wizard-of-Oz
setting. Participants from group H interacted with an human
agent, an actor with a structured and flexible script.
Eight different stimuli, 5 emotion-centered stim-
uli
5
and 3 others (captured during periods of strong
physical effort, concentration and resting), were pre-
sented to each subject
6
. A survey was used to cate-
gorize the profile of the participants according to the
Myers-Briggs type indicator.
Statistical and geometric features were extracted
from the raw, SAX and local-angle representations.
Feature selection was performed using statistical
analysis of variance (ANOVA). The selected feature-
based classifiers were adopted from WEKA software
(Hall et al., 2009), and the HMMs from HMM-
WEKA extension (codified according to Bishop
(2006)). SAX and local angle representations were
implemented using Java (JVM version 1.6.0-24) and
the following results were computed using an Intel
Core i5 2.80GHz with 6GB of RAM.
Principles #1 and #2. To assess the impact of
dealing with individual differences and informative
subtle variations of the signals, we evaluate emotion
recognition scores under SAX and local-angle repre-
sentations using feature-driven models. The score is
accuracy, the ability to correctly label an unlabeled
signal (i.e. to identify the underline emotion from 5
emotions). Accuracy was computed using a 10 cross-
fold validation over the ∼200 collected electrodermal
signals. Fig.2 synthesizes the results.
The isolated use of electrodermal features from
the raw signal (tonic and phasic skin conductivity,
maximum amplitude, rising and recovering time) and
of statistical features extracted from SAX and local-
angle representations leads to an accuracy near 50%
(against 20% when using a random model). The inte-
gration of these features results in an improvement of
10pp to near 60%. Additionally, accuracy improves
when features from skin temperature are included.
Logistic learners, which use regressions on the
real-valued features to affect the probability score of
each emotion, were the best feature-based models for
this experiment. When no feature selection method
is applied, Bayesian nets are an attractive alternative.
Despite the differences between human-to-human and
human-to-robot settings, classifiers are still able to
recognize emotions when mixing the cases. For in-
5
Empathy (following common practices in speech tone
and body approach), expectation (possibility of gaining an
additional reward), positive-surprise (unexpected attribu-
tion of a significant incremental reward), stress (impossible
riddle to solve in a short time to maintain the incremental
reward) and frustration (self-responsible loss of the initial
and incremental rewards).
6
The stimuli were presented in the same order in ev-
ery experience and 6-8 minutes was provided between two
stimulus to neutralize the subject emotional state and re-
move the stress related with the experimental expectations.
SevenPrinciplestoMineFlexibleBehaviorfromPhysiologicalSignalsforEffectiveEmotionRecognitionandDescription
inAffectiveInteractions
79
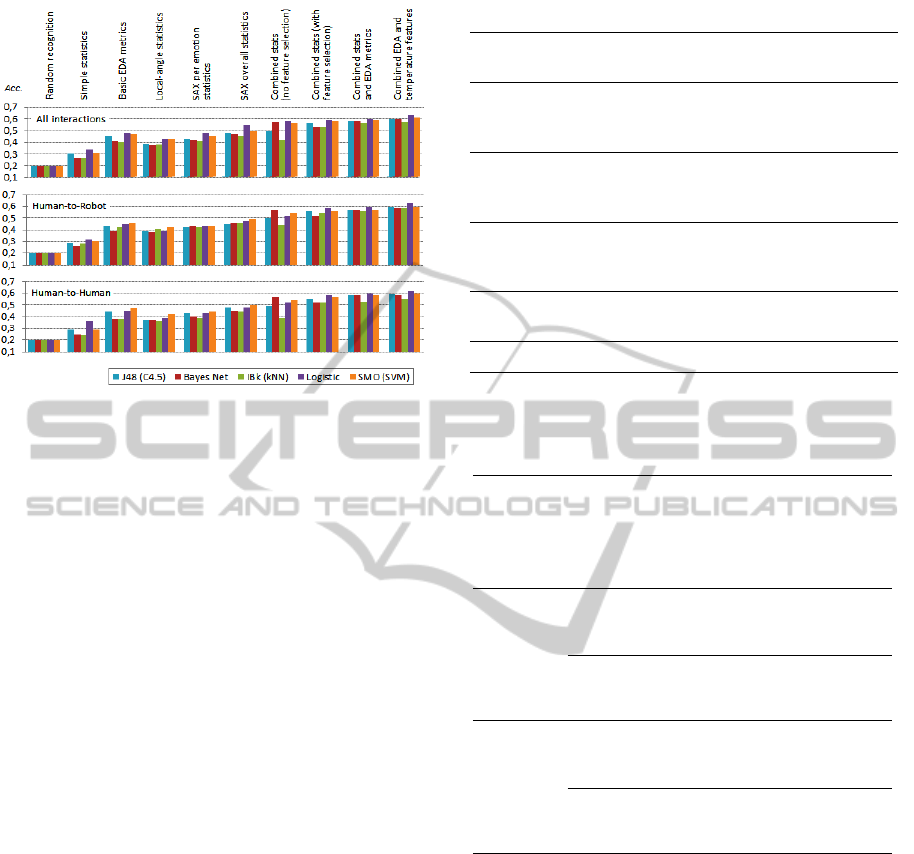
Figure 2: Emotion recognition accuracy (out of 5 emotions)
using feature-driven models.
stance, kNN tends to select the features from a sole
scenario when k<4, while C4.5 trees have dedicated
branches for each scenario.
Note, additionally, that these accuracy levels also
reveal the adequacy of emotion description models,
which can simply rely on centroid and dispersion met-
rics over the most discriminative features.
Additionally, to understand the relevance of fea-
tures extracted from SAX and local-angle representa-
tions to differentiate emotions under assessment, one-
way ANOVA tests were applied with the Tukey post-
hoc analysis. A significance of 5% was considered for
the Levene’s test of variance homogeneity, ANOVA
and Tukey tests. Both features derived from the raw,
SAX and local-angle electrodermal signals were con-
sidered. A representative set of electrodermal features
able to separate emotions is synthesized in Table 1.
Gradient plus centroid metrics from SAX signals
can be adopted to separate negative emotions. Disper-
sion metrics from local-angle representations differ-
entiate positive emotions. Rise time and response am-
plitude can be used to isolate specific emotions, and
statistical features, such as median and distortion, to
predict the affective valence. Kurtosis, which reveals
the flatness of the response’s major peak, and features
derived from the temperature signal were also able to
differentiate emotions with significance using the pro-
posed representations.
Principles #3 and #4. In our experimental set-
ting, the inclusion of sequential behavior leads to an
increase of accuracy levels nearly 10pp. The output
of HMMs were, additionally, combined the output of
probabilistic feature-based classifiers (logistic learn-
ers were the choice). Table 2 discloses the results
Table 1: Features with potential to discriminate emotions.
Features (with strongest statistical significance
to differentiate emotions’ sets)
Separated emotions
Accentuated dispersion metrics (as the mean
root square error) from the SAX and local-angle
representations
Positive (empa-
thy, expectation,
surprise)
Median (relevant to quantify the sustenance of
peaks), distortion and recovery time from SAX
signals
Positive from neg-
ative from neutral
emotions
Gradient (revealing long-term sympathetic acti-
vation by measuring the EDA baseline changed)
and centroid metrics from SAX signals
Fear from frustra-
tion
Rise time
Empathy from oth-
ers
Response amplitude Surprise from others
Table 2: Accuracy of sequence learners to recognize an
emotion (out of 5 emotions) and to correctly discard the 3
least probable emotions.
SAX signal
Inc. local-angle
Inc. temperature
Inc. features
HMM (fully
connected
architecture)
Recognition
accuracy
All 0.40 0.42 0.46 0.67
Robot 0.39 0.41 0.44 0.66
Human 0.39 0.42 0.45 0.67
Discrimination
accuracy
All 0.86 0.88 0.89 –
Robot 0.87 0.88 0.91 –
Human 0.86 0.88 0.90 –
HMM
(left-to-right
architecture)
(Murphy,
2002)
Recognition
accuracy
All 0.43 0.44 0.48 0.71
Robot 0.42 0.43 0.47 0.71
Human 0.41 0.44 0.47 0.69
Discrimination
accuracy
All 0.87 0.88 0.90 –
Robot 0.87 0.89 0.90 –
Human 0.87 0.88 0.89 –
when adopting HMMs with alternative architectures
for approximately 30 signals per emotion (empathy,
expectation, surprise, stress, frustration).
Interestingly, the learned HMMs are highly prone
to accurately neglect 3 emotion labels that do not
fit in the learned behavior. In particular, left-to-
right HMM architectures are particularly well-suited
to mine SAX-based signals. Note, additionally, that
left-to-right architectures are a good emotion descrip-
tor due to the high interpretability of the most prob-
able behavior of the signal when disclosing the most
probable emissions along the main path. Similar ar-
chitectures can be implemented by controlling the ini-
tial transition and emission probabilities.
Although the local-angle representation is not as
critical as SAX for sequential learning, its weighted
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
80

Table 3: Influence of subjects’ profile on EDA responses.
Myers-Briggs
type
Correlated features ([+] positive correlation;
[–] negative correlation)
Extrovert-introvert
[+] Dispersion metrics of SAX signal
[–] Centroid metrics of SAX signal
[–] Response amplitude
Sensing-intuition
[–] Dispersion metrics of raw and SAX signal
[–] Dispersion metrics of local-angles
[–] Rise time
Feeling-thinking
[+] Median and dispersion metrics of SAX sig-
nal
[–] Declive and centroid metrics of local-angles
[–] Rise time
Judging-perceiving
[–] Centroid metrics of raw signal
[–] Dispersion metrics of SAX signal
[+] Response amplitude
use for emotion recognition and discrimination has a
positive impact in the accuracy levels.
The why behind the success of adopting HMMs
for emotion recognition resides on their ability to: i)
detect flexible behavior, such as peak-sustaining val-
ues and fluctuations (hardly measured by features);
ii) to cope with individual differences (with the SAX
scaling strategy being done with respect to all stim-
uli, to the target stimulus, to all subjects or to subject-
specific responses); iii) to cope with subtle variation
using the local-angle representation is used as the in-
put signal; and iv) to deal with lengthy responses (by
increasing the number of hidden states). Additionally,
HMMs can easily capture either a smoothed behavior
or a more delineated behavior by controlling the sig-
nal cardinality using SAX.
Principle #5. Pearson correlations were tested to
correlate the physiological expression with the sub-
jects profile. This analysis, illustrated in Table 3,
shows that their inclusion can be a critical input to
guide the learning task. A positive (negative) correla-
tion means that higher (lower) values for the assessed
feature are related with a polarization towards either
the extrovert, sensing, feeling or perceiving type.
We can observe, for instance, that responses from
sensers and feelers are quicker, while extroverts have
a more instable signal (higher dispersion) although
less intense (lower amplitude).
The insertion of the relative score for the four
Myers-Briggs types was found to increase the accu-
racy of IBk, who tend to select responses from sub-
jects with related profile. Also, for non-lazy prob-
abilistic learners, four data partitions were created,
with the first separating extroverts from introverts
and so on. One model was learned for each pro-
file. Recognition for a test instance now relies on
the equally weighted combined output of each model,
which result in an increased accuracy of 2-3pp. Al-
though the improvement seems to be subtle, note that
the split of instances hampered the learning of the
type-oriented models since we are relying on small-
to-medium number of collected signals.
Principle #6. The analysis of the variance of
key features and of the learned generative models per
emotion provide critical insights for further adapta-
tions of the learning task. For instance, the variance
of rising time across subjects for positive-surprise was
observed to be high due to the fact that some sub-
jects tend to experience a short period of distrust. The
inclusion of similar features in logistic model trees,
where a feature can be tested multiple times using
different values, revealed that they tend to be often
selected, and, therefore, should not be removed due
to their high variance.
Another illustrative observation was the weak
convergence of the Markov model for empathy due to
its idiosyncratic expression. Under this knowledge,
we adapted the left-to-right architecture to include
three main paths. After learning this new model, we
verified a heightened convergence of the model for
each one of the empathy paths, revealing three distinct
forms of physiological expression and, consequently,
an improved recognition rate.
Principle #7. We performed additional tests to
understand the impact of the experimental conditions
on the physiological expression of emotions. First,
we performed a t-test to assess the influence of fea-
tures derived from the signal collected during all the
affective interaction (without partitions by stimulus)
on the adopted type of interaction (human-to-human
vs. human-to-robot). Results over the SAX repre-
sentation show that human-to-human interactions (in
comparison to human-to-robot) have significantly: i)
a higher median (revealing an increased ability to sus-
tain peaks), and ii) higher values of dispersion and
kurtosis (revealing heightened emotional response).
Second, we studied the impact of the subjects’
perception on the experiment by correlating signal
features with the answers to a survey made at the end
of the interaction. Bivariate Pearson correlation be-
tween a set of scored variables assessed in the final
survey and physiological features was performed at a
5% significance level. Table 4 synthesizes the most
significant correlations found. They include posi-
tive correlation of local-angle dispersion (revealing
changes in the gradient) with intensity, felt influence
and perceived intention; positive correlation of SAX
dispersion (revealing heightened variations from the
baseline) with the perceived empathy, confidence and
trust; quicker rise time for heightened perceived opti-
SevenPrinciplestoMineFlexibleBehaviorfromPhysiologicalSignalsforEffectiveEmotionRecognitionandDescription
inAffectiveInteractions
81

Table 4: Influence of subject perception in the physiological
expression of emotions.
Origin Correlations with higher statistical significance
Local-
angle
features
[+] Dispersion metrics with the felt intensity, the under-
standing of the agent’s intention, and his level of influ-
ence on felt emotions.
SAX-
based
features
[+] Dispersion metrics with the perceived empathy,
trust and confidence of the agent.
Computed
metrics
[+/-] Amplitude positively corr. with the perceived
agent influence and negatively corr. with the felt plea-
sure;
[-] Rise time with the perceived positivism on the
agent’s attitude.
mism; and higher amplitude of responses for height-
ened felt influence and low levels of pleasure.
These two observations motivate the need to turn
the learning models sensitive to additional informa-
tion related with experimental conditions and with the
subject perception and expectations. Their inclusion
as new features in feature-based learners resulted in a
generalized improved accuracy (3-5pp).
5 CONCLUSIONS
This work provides seven important principles on
how to recognize and describe emotions during af-
fective interactions from physiological signals. These
principles aim to overcome the limitations of exist-
ing emotion-centered methods to mine signals. We
propose the use of expressive signal representations
to correct individual differences and to account for
subtle variations, and the integration of sequential and
feature-based models. Additionally, we demonstrate
the relevance of using the traits of the participant, in-
formation regarding the experimental conditions, and
specific properties of the learned models to improve
the learning task.
We presented initial empirical evidence that sup-
ports the utility for each one the enumerated princi-
ples. In particular, we observed that the adoption of
techniques to incorporate the seven principles can im-
prove emotion recognition rates by 20pp. Finally, a
new methodology was proposed to guide the inclu-
sion of these principles on the learning task.
ACKNOWLEDGEMENTS
This work was supported by Fundao para a Ciłncia e a
Tecnologia under the project PEst-OE/EEI/LA0021/2013
and PhD grant SFRH/BD/ 75924/2011, and by the
project EMOTE from the EU 7thFramework Program
(FP7/2007-2013).
REFERENCES
Andreassi, J. (2007). Psychophysiology: Human Behavior
And Physiological Response. Lawrence Erlbaum.
Bishop, C. M. (2006). Pattern Recognition and Machine
Learning (Inf. Science and Stat.). Springer-Verlag
New York, Inc., Secaucus, NJ, USA.
Hall, M., Frank, E., Holmes, G., Pfahringer, B., Reute-
mann, P., and Witten, I. H. (2009). The weka data
mining software: an update. SIGKDD Explor. Newsl.,
11(1):10–18.
Jerritta, S., Murugappan, M., Nagarajan, R., and Wan, K.
(2011). Physiological signals based human emotion
recognition: a review. In CSPA, 2011 IEEE 7th Inter-
national Colloquium on, pages 410 –415.
Kulic, D. and Croft, E. A. (2007). Affective state estimation
for human-robot interaction. Trans. Rob., 23(5):991–
1000.
Leite, I., Henriques, R., Martinho, C., and Paiva, A. (2013).
Sensors in the wild: Exploring electrodermal activ-
ity in child-robot interaction. In HRI, pages 41–48.
ACM/IEEE.
Lessard, C. S. (2006). Signal Processing of Random Physi-
ological Signals. S.Lectures on Biomedical Eng. Mor-
gan and Claypool Publishers.
Lin, J., Keogh, E., Lonardi, S., and Chiu, B. (2003a). A
symbolic representation of time series, with implica-
tions for streaming algorithms. In ACM SIGMOD
workshop on DMKD, pages 2–11, NY, USA. ACM.
Lin, J., Keogh, E. J., Lonardi, S., and chi Chiu, B. Y.
(2003b). A symbolic representation of time series,
with implications for streaming algorithms. In Zaki,
M. J. and Aggarwal, C. C., editors, DMKD, pages 2–
11. ACM.
Murphy, K. (2002). Dynamic Bayesian Networks: Repre-
sentation, Inference and Learning. PhD thesis, UC
Berkeley, CS Division.
Picard, R. W., Vyzas, E., and Healey, J. (2001). Toward
machine emotional intelligence: Analysis of affective
physiological state. IEEE Trans. Pattern Anal. Mach.
Intell., 23(10):1175–1191.
Rani, P., Liu, C., Sarkar, N., and Vanman, E. (2006). An em-
pirical study of machine learning techniques for affect
recognition in human-robot interaction. Pattern Anal.
Appl., 9(1):58–69.
Wagner, J., Kim, J., and Andre, E. (2005). From physiologi-
cal signals to emotions: Implementing and comparing
selected methods for feature extraction and classifica-
tion. In ICME, pages 940 –943. IEEE.
Wu, C.-K., Chung, P.-C., and Wang, C.-J. (2011). Extract-
ing coherent emotion elicited segments from physio-
logical signals. In WACI, pages 1–6. IEEE.
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
82
