
Fast Target Redetection for CAMSHIFT using Back-projection and
Histogram Matching
Abdul Basit
1,2
, Matthew N. Dailey
1
, Pudit Laksanacharoen
3
and Jednipat Moonrinta
1
1
Department of Computer Science and Information Management, Asian Institute of Technology,
Klong Luang (12120), Pathumthani, Thailand
2
Department of Computer Science and Information Technology, University of Balochistan, Quetta, Pakistan
3
Mechanical Engineering, King Mongkut’s University of Technology (North Bangkok) Bangsue, Bangkok, Thailand
Keywords:
Monocular Visual Tracking, Redetection, Adaptive Histogram, CAMSHIFT Tracker, Backprojection.
Abstract:
Most visual tracking algorithms lose track of the target object (start tracking a different object or part of
the background) or report an error when the object being tracked leaves the scene or becomes occluded in
a cluttered environment. We propose a fast algorithm for mobile robots tracking humans or other objects
in real-life scenarios to avoid these problems. The proposed method uses an adaptive histogram threshold
matching algorithm to suspend the CAMSHIFT tracker when the target is insufficiently clear. While tracking
is suspended, any method would need to continually scan the entire image in an attempt to redetect and
reinitialize tracking of the specified object. However, searching the entire image for an arbitrary target object
requires an extremely efficient algorithm to be feasible in real time. Our method, rather than a detailed search
over the entire image, makes efficient use of the backprojection of the target object’s appearance model to
hypothesize and test just a few candidate locations for the target in each image. Once the target object is
redetected and sufficiently clear in a new image, the method reinitializes tracking. In a series of experiments
with four real-world videos, we find that the method is successful at suspending and reinitializing CAMSHIFT
tracking when the target leaves and reenters the scene, with successful reinitialization and very low false
positive rates.
1 INTRODUCTION
In security and surveillance, one useful type of au-
tonomous vehicle is the pursuit robot, a robot able to
autonomously pursue a target object. Our research
focuses on the use of surveillance robots such as the
iRobot PackBot for autonomous target pursuit. Target
pursuit robots are useful in any situation where a per-
son or object must be tracked but human access would
be impossible or life threatening, e.g., tracking a vic-
tim in a building on fire, tracking a terrorist during
an ongoing attack, or tracking a suspicious individual
who has entered a secure area. An example pursuit
robot from our lab is shown in Fig. 1.
Cameras are becoming increasingly inexpensive
and useful sensors for autonomous vehicles. Vision-
guided robots must use their cameras to avoid obsta-
cles and plan optimal paths in order to accomplish
their tasks. In addition to obstacle avoidance and path
planning, vision-guided pursuit robots must addition-
ally perform visual target tracking using their cam-
Figure 1: All-terrain robot for tracking and pursuit of arbi-
trary objects using a monocular camera.
eras. We are particularly interested in the viability of
monocular vision as the main sensor for autonomous
pursuit.
Tracking an object during target pursuit requires
a tracker that is both sufficiently accurate and suffi-
ciently fast to keep track of the object in real time.
We categorize the common tracking algorithms as to
whether they utilize feature matching, optical flow,
507
Basit A., N. Dailey M., Laksanacharoen P. and Moonrinta J..
Fast Target Redetection for CAMSHIFT using Back-projection and Histogram Matching.
DOI: 10.5220/0004670605070514
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 507-514
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

or feature histograms. Feature matching algorithms
such as SIFT (Zhou et al., 2009), SURF (Ta et al.,
2009), and shape matching algorithms such as con-
tour matching (Yokoyama and Poggio, 2005) are too
computationally expensive to be considered for real-
time tracking by a moving robot with modest com-
pute resources. Optical flow methods (Denman et al.,
2007) may within reach in terms of speed, but they do
not maintain an appearance model. This means they
are unable (by themselves) to recover from occlusions
and objects leaving the field of view.
Histogram-based trackers, on the other hand, are
not only fast, but also maintain an appearance model
that is potentially useful for recovering tracking af-
ter an occlusion or reappearance in the field of view.
When the target object is occluded or leaves the field
of view (or when the tracker gets lost for some rea-
son), we simply need to suspend tracking, continually
search the image for the reappearance of the target ob-
ject, then, once the object has reappeared in the scene,
reinitialize the tracker.
In this paper, we thus consider the problem of re-
detecting the target object once a feature histogram-
based tracking method has been suspended. We as-
sume that the goal is to search for the target object in
every frame without any bias as to where the object
might appear.
The common approach to object search in com-
puter vision is the sliding window. The typical
algorithm slides a detection window over the im-
age at multiple scales, and at each step, the se-
lected image window’s feature histogram is com-
pared with the stored color histogram (the appear-
ance model). The naive sliding window approach is
computationally inefficient, however, and many re-
searchers have developed methods to improve the ef-
ficiency of sliding window calculations in different
contexts. Porikli (Porikli, 2005) propose an “integral
histogram” method using integral images. The inte-
gral image is a well-known technique that supports
calculating the sum of the values in a rectangular re-
gion of a feature plane in constant time. Perreault
and Hebert (Perreault and Hebert, 2007) compute his-
tograms for median filtering efficiently by maintain-
ing separate columnwise histograms, and, as the slid-
ing window moves right, first updating the relevant
column histogram then adding and subtracting the rel-
evant column histograms to the histogram for the slid-
ing window. Sizintsev et al. (Sizintsev et al., 2008)
take a similar approach to obtain histograms over slid-
ing windows by efficiently updating the histogram us-
ing previously calculated histograms for overlapping
windows.
However, although this work demonstrates that it
is possible to compute sliding window histograms in
constant time per window location, it may still not be
fast enough if multiple window sizes and aspect ratios
must be considered, and furthermore, finding a sin-
gle best rectangular window still does not give a pre-
cise object shape and orientation. Chen et al. (Chen
et al., 2008) address the speed issue by scattering ran-
domly generated elliptical regions over the image in
a first rough detection phase and address the preci-
sion issue by performing fine searches from the more
likely candidate regions. In this paper, we propose a
backprojection-based method for the rough detection
phase that does not require breaking the image into
regions.
CAMSHIFT (Continuously Adaptive Mean Shift)
(Bradski, Oct; Allen et al., 2004) is a fast and ro-
bust feature histogram tracking algorithm potentially
useful for mobile robots in outdoor environments.
The method begins with manual initialization from
a target image patch. It then tracks the region using
a combination of color histograms, the basic mean-
shift algorithm (Comaniciu et al., 2000; Comaniciu
et al., 2003), and an adaptive region-sizing step. It is
scale and orientation invariant. The main drawback
of CAMSHIFT is that if the target leaves the field of
view or is occluded, the algorithm either reports an
error or starts tracking a completely different object.
This limitation of CAMSHIFT lies in the fact that
on each frame, it performs a global backprojection
of the appearance model followed by a local search
for the best target region beginning from the previous
frame’s estimated region. Since the method performs
a search for a local peak in the global backprojection,
it is easily distracted by background objects with sim-
ilar color distributions.
We propose in our previous paper (Basit et al.,
2012), a motion model based on EKF to improve
the pursuit robot trajectory relative to the target path.
We fused pursuit robot (differential drive) kinematics
and target dynamics with a model of the color region
tracking sensor using an extended Kalman filter.
In this paper, we extend our work to pro-
pose an efficient method to 1) intelligently suspend
CAMSHIFT tracking when the target leaves the scene
or is occluded and 2) reinitialize the tracker when the
target object returns to view. The decision to sus-
pend tracking is based on an adaptive threshold ap-
plied to the dissimilarity between the CAMSHIFT
region’s color histogram and the stored appearance
model, as well as heuristic limitations on changes
in the tracking window’s size. The reinitialization
method is based on backprojection of the appearance
model, thresholding of the per-pixel likelihood, and
connected components analysis, resulting in a collec-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
508
tion of candidate regions, the best of which is selected
if it is sufficiently likely according to the appearance
model.
The idea of using the global backprojection of a
color histogram to quickly obtain candidate detection
regions is related to work by Chen et al. (Chen et al.,
2009), who, in the context of a pure object detec-
tion task, not involving tracking, propose a rough de-
tection stage using backprojection and morphological
analysis to provide an initial guess for a mean shift
style precise detection stage. Our method is similar
in the use of the global backprojection. However, we
only perform global detection while tracking is sus-
pended due to occlusion or an object that has left
the field of view. The methods for multiple candi-
date region hypothesis checking and adaptive similar-
ity thresholding based on observation of the object’s
appearance over time during tracking are also new
contributions.
In an empirical evaluation on real-world videos,
we show that the proposed method is a robust method
for target tracking and reinitialization during pursuit
that is successful at reinitialization, has very low false
positive rates, and runs in real time.
2 TRACKING AND TARGET
REDETECTION
In this section, we describe our algorithms for sus-
pending CAMSHIFT tracking, redetecting the target,
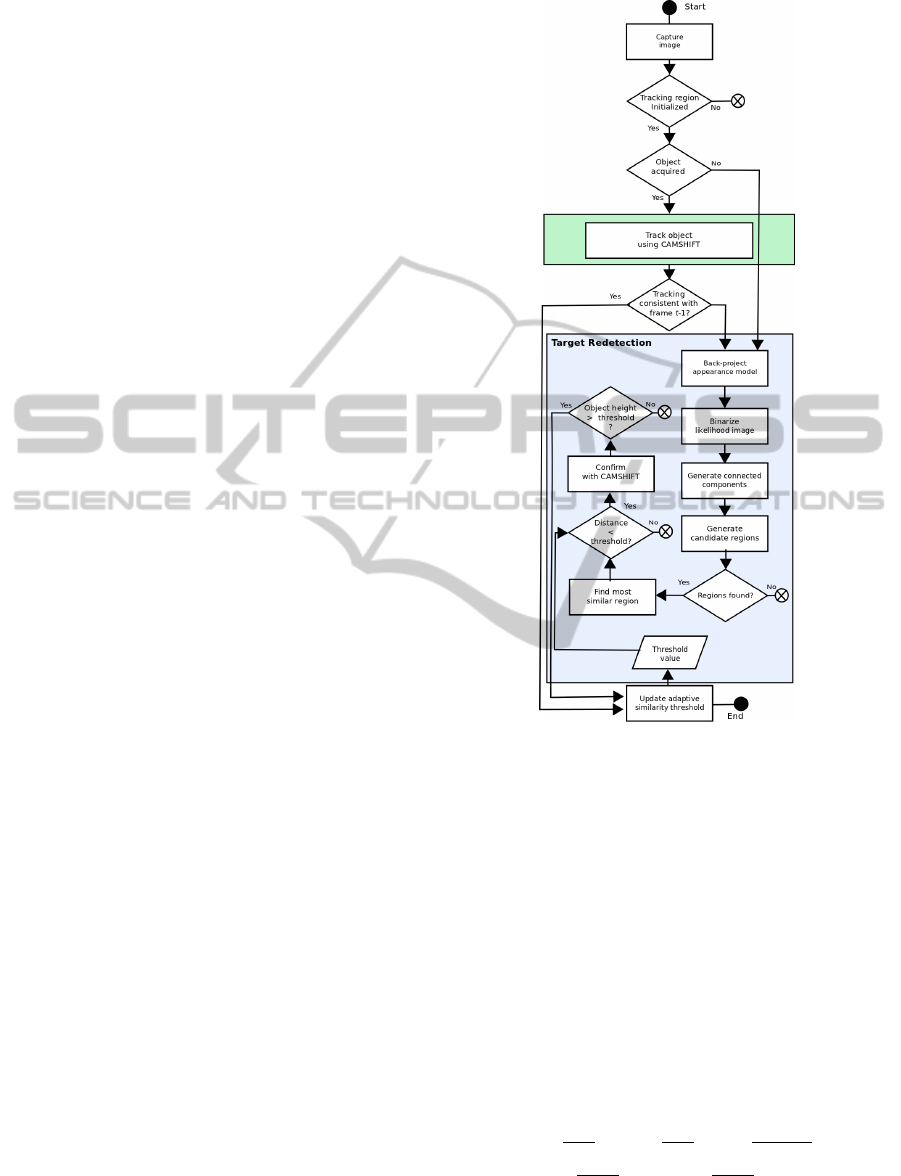
and reinitializing tracking. The overall flow of the al-
gorithm is shown in Fig. 2. The following sections
provide a brief overview of CAMSHIFT and the de-
tails of our methods.
2.1 CAMSHIFT Object Tracking
Although our methods are compatible with any fast
feature histogram-based image region tracker, in our
experiments, we use CAMSHIFT (Bradski, Oct).
CAMSHIFT applies traditional mean shift to the
backprojection of the appearance model (color his-
togram) and adds an adaptive region sizing step.
Given an initial detection window in frame t − 1 and
the backprojection of the appearance model onto the
image acquired at time t, the method computes, over
the detection window, the center of mass of the back-
projection, shifts the detection window to the com-
puted center of mass, and repeats the process until
convergence. The method additionally calculates the
zeroth, first, and second order moments of the back-
projection in the final detection window at (x
c
,y
c
) and
Figure 2: Flow of proposed target tracking and redetec-
tion method. The tracking phase (green block) simply uses
CAMSHIFT, and maintains an adaptive histogram distance
threshold. When the target object leaves the scene or is
occluded, we switch to the detection phase (blue block),
which proceeds as follows. 1) We backproject the appear-
ance model to determine the consistency of each pixel with
the appearance model. 2) We binarize the backprojection to
eliminate weakly consistent image regions. 3) We generate
the connected components using the morphological filters.
4) We generate a set of candidate regions by eliminating
inconsistent connected components. 5) We find the most
consistent region using histogram comparison between can-
didate region and target histogram.
updates the aspect ratio r and size (w, h) of the de-
tection window according to the calculated moments
(formulae are from (Exner et al., 2010)):
x
c
=
M
10
M
00
, y
c
=
M
01
M
00
, r =
M
20
/x
2
c
M
02
/y
2
c
,
w =
p
2M
00
· r, h =
p
2M
00
/r.
FastTargetRedetectionforCAMSHIFTusingBack-projectionandHistogramMatching
509

2.2 Suspending Tracking
CAMSHIFT works extremely well so long as the
target appearance remains consistent and distinctive
with respect to the background. However, when the
target object leaves the scene, is occluded, or im-
pinges a background region with a similar color distri-
bution, the tracking region tends to change rapidly in
size, growing into background regions or moving to a
different location completely. When this happens dur-
ing a target pursuit application, lest the pursuit motion
planner become confused, it is important to suspend
tracking and attempt to redetect the target object.
To achieve this, as a first measure we impose sim-
ple constraints on the target detection window’s lo-
cation and size. If the target object’s estimated size
or location changes by an amount inconsistent with
robot and target dynamics, clearly, the tracker is lost
and needs to be reinitialized.
However, such simple location and size con-
straints are not sufficient. We find that in cluttered
scenes, when the target is partially or wholly occluded
or leaves the scene, CAMSHIFT tends to get dis-
tracted by background regions, oftentimes without a
sufficiently large change in position or size to flag sus-
pension.
We therefore, before committing to CAMSHIFT’s
estimate of the target at time t, verify the quality of the
candidate detection region using an adaptive thresh-
old applied to the dissimilarity between the candi-
date region’s color histogram H
r
t
and the appearance
model H
m
. We use the default OpenCV histogram
comparison function (Bradski, ), which returns a dis-
tance based on the Bhattacharyya coefficient
d
t
≡ d(H
r
t
,H
m
) =
r
1 −
∑
i
p
H
r
t
(i) · H
m
(i). (1)
(The implementation also normalizes the histograms
to sum to 1.) The resulting distance varies between
0, for identical histograms, to 1, for non-overlapping
histograms.
The histogram comparison threshold is computed
adaptively. We keep running estimates of the distance
measure’s mean and standard deviation
µ
t
= µ
t−1
+
d
t
− µ
t−1
t
,
σ
t
=
s
(t − 2)σ
2
t−1
+ (d
t
− µ
t−1
)(d
t
− µ
t
)
t − 1
,
and then suspend tracking when we obtain a new dis-
tance that deviates too far from the running mean, i.e.,
when
d
t
> µ
t−1
+ θσ
t−1
.
θ is a threshold on the z-score of the newly measured
distance. We use θ = 3 in our experiments.
(a) (b)
(c) (d)
(e) (f)
Figure 3: Example target redetection steps. (a) Example
image I
t
containing the target. (b) Backprojection BP
t
of
appearance model. (c) Binarized and filtered version of BP
t
.
(d) Bounding boxes of candidate regions after filtering out
small connected components. (e) Candidate regions from
(d) overlaid on I
t
. (f) Reinitialized CAMSHIFT result.
2.3 Target Redetection
While tracking is suspended, on every frame, we need
to execute the target redetection algorithm. The flow
is shown in the light blue box in Fig. 2, and an exam-
ple of the result of each step is shown in Fig. 3. We
detail each step here.
2.3.1 Backproject the Appearance Model
The color histogram H
m
gives us the probability
P(I
t
(x,y) | target) of observing a pixel with color
I
t
(x,y) given that the pixel is actually in the target
region. Backprojection of the appearance model H
m
simply means that we generate a new image BP
t
such
that BP
t
(x,y) = P(I
t
(x,y) | target) according to H
m
.
BP
t
will have in general several clusters of pixels with
high values, indicating some degree of consistency of
the region with H
m
. An example is shown in Fig. 3(b).
2.3.2 Binarize Likelihood Image
In this step, to eliminate weak matches between I
t
and the appearance model, we threshold BP
t
using the
standard Otsu method to obtain a binary image C
t
in-
dicating candidate target pixels.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
510

2.3.3 Generate Connected Components
In this step, we apply morphological erosion and dila-
tion to C
t
to eliminate noise and fill gaps, then extract
the connected components. In our experiments, we
use a square structuring element 3 pixels wide. An
example is shown in Fig. 3(c).
2.3.4 Generate Candidate Regions
In this step, we eliminate any connected components
with an area less than 30% of the target object’s size
in the last frame before tracking was suspended, then
we find the rectangular bounding box of each surviv-
ing connected component. If no candidate regions re-
main, we continue to the next frame. Example surviv-
ing bounding boxes are shown in Fig. 3(d) and over-
laid on the original image in Fig. 3(e).
2.3.5 Finding Most Similar Region
In this step, we obtain the color histogram of each re-
gion surviving the previous step and compare with the
appearance model H
m
using Equation 1. If the small-
est distance is below the adaptive threshold calculated
in the tracking phase, we reinitialize CAMSHIFT us-
ing the corresponding best region. An example of suc-
cessful reinitialization is shown in Fig. 3(f).
3 EXPERIMENTAL RESULTS
In this section, we evaluate the proposed method
in terms of tracking accuracy and real time perfor-
mance.
We acquired four 30 fps videos at a resolution
of 640×480 simulating target pursuit scenarios in
various outdoor locations at the Asian Institute of
Technology. All four scenes were scenes in which
CAMSHIFT is mostly successful at tracking so long
as the target is clearly visible in the scene.
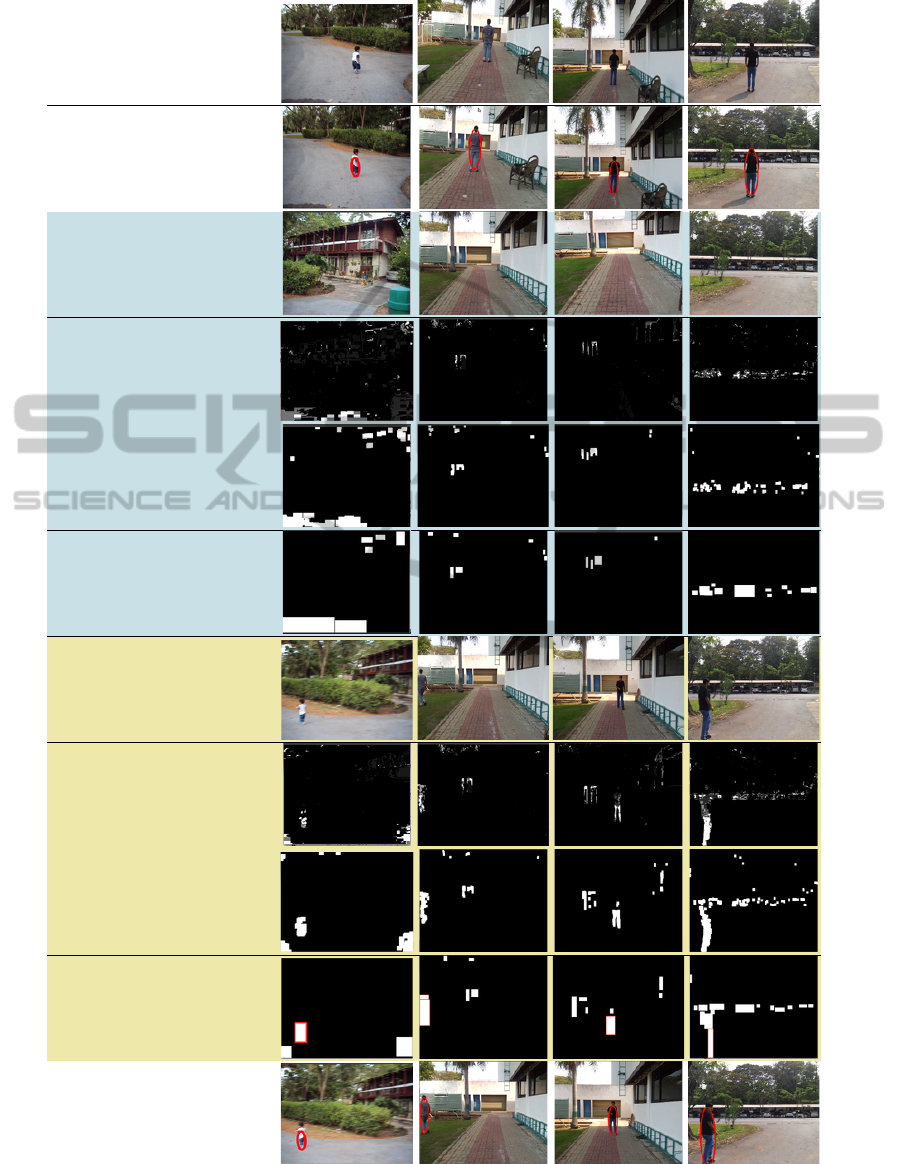
In the first frame of each video (R1 in Fig. 4),
we initialized CAMSHIFT tracking by selecting the
human target in the scene (R2 in Fig. 4). We then
ran the proposed tracking, suspension, and redetec-
tion method to the end of each video.
3.1 Accuracy
During tracking, we incrementally updated the mean
µ
t
and standard deviation σ
t
of the distance d
t
be-
tween the appearance model H
m
and the tracked tar-
get’s color histogram H
r
t
. In almost all cases, when
the target left the scene, the distance d
t
exceeded the
adaptive threshold, except for a few cases in which
the redetection algorithm found a sufficiently similar
object in the background.
R3 to R6 in Fig. 4 show results of the backpro-
jection, binarization, and candidate region calculation
steps for one frame of each video in which the target
was not in the scene. In these four cases, the method
was successful at suspending tracking.
R7 to R10 in Fig. 4 show results of the backpro-
jection, binarization, and candidate region calculation
steps for a frame of each video in which the target ob-
ject has reappeared. In these four cases, the method
was successful at selecting the correct target region.
R11 of Fig. 4 shows successful reinitialization of
CAMSHIFT in the respective frames.
Over the four videos, the target was successfully
tracked in 95.6% of the frames in which the target
was in the scene, with false positives only 4.4% of the
frames in which the target was not in the scene. The
accuracy results per video are summarized in Table 1.
3.2 Real-time Performance
We tested the runtime performance of the system on
two different hardware configurations, a 2.26 GHz In-
tel Core i3 laptop running 32-bit Ubuntu Linux 11.10
and a 1.6 GHz Intel Atom N280 single core net-
book running 32-bit Lubuntu 11.10. We measured
the average time required for tracking (the standard
CAMSHIFT routine plus histogram distance mea-
surement and adaptive threshold update) and target
redetection over all relevant frames in the four test
videos.
The results are summarized in Table 2. Both algo-
rithms run at high frame rates, with the worst case of
just over 10 fps for redetection on the Atom proces-
sor. The method is clearly feasible for onboard exe-
cution by a mobile robot with modest computational
resources.
4 CONCLUSIONS
We have proposed and demonstrated the feasibility of
an intelligent but efficient method to suspend color
histogram based trackers such as CAMSHIFT when
the target leaves the scene or is occluded in cluttered
environments. The method correctly and quickly re-
detects the target and reinitializes tracking when the
target reappears in the scene. The method is suffi-
ciently fast to run on embedded systems with modest
resources, e.g., mobile robots.
We introduced a method in order to easily de-
ploy it in the real world physical robots and perform
FastTargetRedetectionforCAMSHIFTusingBack-projectionandHistogramMatching
511
R1: Frame before tracking
initialization
R2: Tracking while target is in
the scene
R3: Target leaves the scene
R4: Backprojection
R5: Binarized connected
components
R6: Candidate regions (none
are selected)
R7: Target object returns to the
scene
R8: Backprojection
R9: Binarized connected
components
R10: Selected candidate
regions (target is selected)
R11: CAMSHIFT
reinitialization
Figure 4: Proposed method tested in different outdoor environments with different background and target objects. Each
column shows images from a different video. Rows show the results of each step of processing. Blue colored rows show
processing when the target is not in the scene. Yellow colored rows show the same processing steps when the target returns to
the scene.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
512
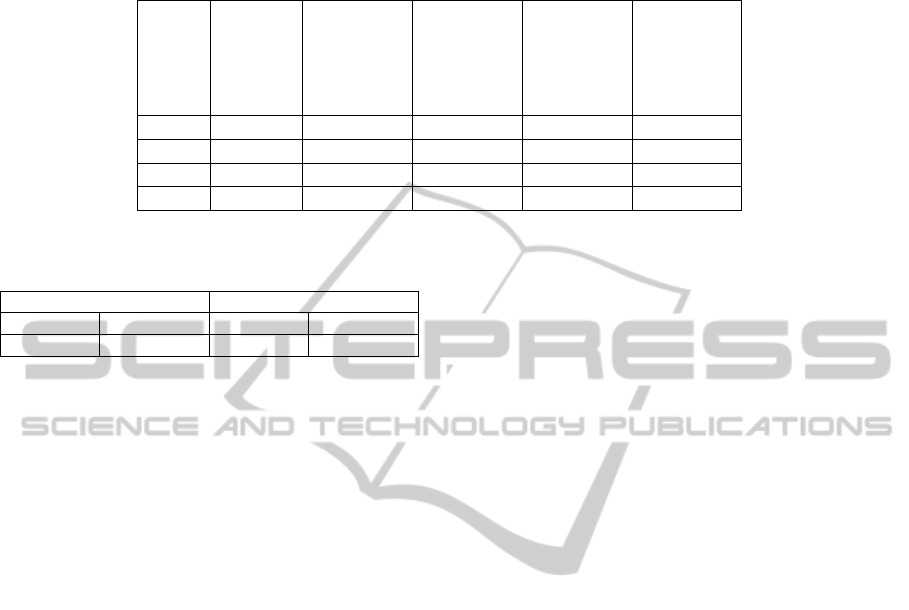
Table 1: Accuracy results. For each video, we report the effective histogram distance threshold at the end of the video, the
percentage of frames containing the target in which tracking was incorrectly suspended or resumed late, and the percentage
of frames not containing the target in which the target was falsely detected.
Video Adaptive
his-
togram
thresh-
old
Object
visible (#
of frames)
Object
invisible
(# of
frames)
Object not
detected
(FN)
False
object
detection
(FP)
a 0.8299 389 50 2.23% 2.01%
b 0.6017 637 35 10.15% 0%
c 0.7432 541 150 1.20% 2.34%
d 0.7805 426 174 2.64% 3.42%
Table 2: Runtime performance of tracking and redetection
algorithms on two different processors.
Redetection Phase Tracking Phase
Core i3 Atom N280 Core i3 Atom N280
41.455 ms 91.232 ms 16.340 ms 49.234ms
real-world experiments. Robots usually lose target
while tracking because of jerky motions and irregular
(nonuniform) earth surface. Computationally expen-
sive algorithms cannot be applied on each frame to
find the target especially when real time response is
required. Our main focus is to correctly suspend and
reinitialize CAMSHIFT tracking instead of its perfor-
mance. We can improve the performance of the visual
tracker by incorporating robust methods while keep-
ing the speed performance in view.
The proposed method is not strongly coupled to
CAMSHIFT — it could be integrated with any feature
histogram based tracker for which backprojection is
efficient. Similar to work on improving CAMSHIFT
in the literature (Zhou et al., 2009), (Nouar et al.,
2006) and (Emami and Fathy, 2011), the tracking re-
sults could be improved by using a more sophisticated
appearance model.
ACKNOWLEDGEMENTS
This research was supported by a Royal Thai Govern-
ment research grant to MND and PL. AB was sup-
ported by graduate fellowships from the University of
Balochistan Quetta, the Higher Education Commis-
sion of Pakistan, and the Asian Institute of Technol-
ogy Thailand.
REFERENCES
Allen, J. G., Xu, R. Y. D., and Jin, J. S. (2004). Object
tracking using camshift algorithm and multiple quan-
tized feature spaces. In Pan-Sydney Area Workshop on
Visual Information Processing, volume 36, pages 3–7.
Basit, A., Dailey, M. N., and Laksanacharoen, P. (2012).
Model driven state estimation for target pursuit. In
International Conference on Control, Automation,
Robotics & Vision (ICARCV), 2012 IEEE Conference
on, pages 1077–1082.
Bradski, G. The OpenCV library.
Bradski, G. (Oct). Real time face and object tracking as a
component of a perceptual user interface. In Applica-
tions of Computer Vision, 1998. WACV ’98. Proceed-
ings., Fourth IEEE Workshop on, pages 214–219.
Chen, X., Huang, H., Zheng, H., and Li, C. (2008).
Adaptive bandwidth mean shift object detection. In
Robotics, Automation and Mechatronics, 2008 IEEE
Conference on, pages 210–215.
Chen, X., Huang, Q., Hu, P., Li, M., Tian, Y., and Li, C.
(2009). Rapid and precise object detection based on
color histograms and adaptive bandwidth mean shift.
In Intelligent Robots and Systems, 2009. IROS 2009.
IEEE/RSJ International Conference on, pages 4281–
4286.
Comaniciu, D., Ramesh, V., and Meer, P. (2000). Real-
time tracking of non-rigid objects using mean shift.
In IEEE conference on Computer Vision and Pattern
Recognition, 2000. Proceedings., volume 2, pages
142–149.
Comaniciu, D., Ramesh, V., and Meer, P. (2003). Kernel-
based object tracking. Pattern Analysis and Machine
Intelligence, IEEE Transactions on, 25(5):564–577.
Denman, S., Chandran, V., and Sridharan, S. (2007). An
adaptive optical flow technique for person tracking
systems. Pattern Recognition Letters, 28(10):1232–
1239.
Emami, E. and Fathy, M. (2011). Object tracking using im-
proved camshift algorithm combined with motion seg-
mentation. In Machine Vision and Image Processing
(MVIP), 2011 7th Iranian, pages 1–4.
Exner, Bruns, Kurz, Grundhfer, and Bimber (2010). Fast
and robust camshift tracking. In Proceedings of IEEE
International Workshop on Computer Vision for Com-
puter Games (IEEE CVCG).
Nouar, O.-D., Ali, G., and Raphael, C. (2006). Improved
object tracking with camshift algorithm. In Acoustics,
Speech and Signal Processing, 2006. ICASSP 2006
FastTargetRedetectionforCAMSHIFTusingBack-projectionandHistogramMatching
513

Proceedings. 2006 IEEE International Conference on,
volume 2, pages II–II.
Perreault, S. and Hebert, P. (2007). Median filtering in con-
stant time. Image Processing, IEEE Transactions on,
16(9):2389–2394.
Porikli, F. (2005). Integral histogram: a fast way to extract
histograms in cartesian spaces. In Computer Vision
and Pattern Recognition, 2005. CVPR 2005. IEEE
Computer Society Conference on, volume 1, pages
829–836.
Sizintsev, M., Derpanis, K., and Hogue, A. (2008).
Histogram-based search: A comparative study. In
Computer Vision and Pattern Recognition, 2008.
CVPR 2008. IEEE Conference on, pages 1–8.
Ta, D.-N., Chen, W.-C., Gelfand, N., and Pulli, K. (2009).
Surftrac: Efficient tracking and continuous object
recognition using local feature descriptors. In IEEE
conference on Computer Vision and Pattern Recogni-
tion., pages 2937–2944.
Yokoyama, M. and Poggio, T. (2005). A contour-based
moving object detection and tracking. In Visual
Surveillance and Performance Evaluation of Tracking
and Surveillance., pages 271–276.
Zhou, H., Yuan, Y., and Shi, C. (2009). Object tracking
using sift features and mean shift. Computer Vision
and Image Understanding, 113(3):345–352.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
514
