
Client-side Mobile Visual Search
Andreas Hartl, Dieter Schmalstieg and Gerhard Reitmayr
Institute for Computer Graphics and Vision, Graz University of Technology, Inffeldgasse 16, Graz, Austria
Keywords:
Visual Search, Mobile Phone, Descriptors, Vocabulary Tree, Geometric Verification, Augmented Reality.
Abstract:
Visual search systems present a simple way to obtain information about our surroundings, our location or
an object of interest. Typically, mobile applications of visual search remotely connect to large-scale systems
capable of dealing with millions of images. Querying such systems may induce considerable delays, which
can severeley harm usability or even lead to complete rejection by the user. In this paper, we investigate an
interim solution and system design using a local visual search system for embedded devices. We optimized a
traditional visual search system to decrease runtime and also storage space in order to scale to thousands of
training images on current off-the-shelf smartphones. We demonstrate practical applicability in a prototype for
mobile visual search on the same target platform. Compared with the unmodified version of the pipeline we
achieve up to a two-fold speed-up in runtime, save 85% of storage space and provide substantially increased
recognition performance. In addition, we integrate the pipeline with a popular Augmented Reality SDK on
Android devices and use it as a pre-selector for tracking datasets. This allows to instantly use a large number
of tracking targets without requiring user intervention or costly server-side recognition.
1 INTRODUCTION
Visual search is a way of obtaining information about
objects in the proximity of the user by taking an im-
age of the object and using the image to index into
a database of known objects. With advancements in
processing power, screen size and connectivity, mo-
bile devices such as smartphones or tablets have be-
come an interesting platform for this kind of service.
It is important to note that in this case, mobile vi-
sual search may replace standard input methods up
to a certain degree. This means, that information re-
trieval may take place considerably faster than in a
traditional keyboard or touchscreen-driven setup. To-
day, mobile visual search is available through services
like Google Goggles
1
or kooaba
2
, dealing with large
numbers of categories or classes such as products, lo-
gos, printed text, but also places and faces. While
the former is available as an application on major mo-
bile platforms, the latter can be queried through a web
API, processing a given image.
Currently server-side visual search operation ex-
hibits considerable delays. This may be due to in-
complete coverage of suitable mobile networks (3G
onwards) but also due to delays in the recognition en-
1
http://www.google.com/mobile/goggles
2
http://www.kooaba.com
Figure 1: Mobile prototype: top-left: client-side visual
search, top-right: tracking and augmenting an image tar-
get recognized by client-side visual search, bottom-left: fast
switching of tracking datasets with the local pipeline (268
ms); bottom-right: slow recognition using the server-side
approach (1984 ms).
gine, which are independent of the connection quality.
Such delays can severely harm usability or even lead
to complete rejection of the application by the user.
We seek to mitigate this situation by performing
visual search directly on the mobile device. Conse-
quently, the time required for getting an initial result
can be considerably reduced. In this work we present
125
Hartl A., Schmalstieg D. and Reitmayr G..
Client-side Mobile Visual Search.
DOI: 10.5220/0004672901250132
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 125-132
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

a visual search pipeline for embedded devices and ex-
tensively evaluate it w.r.t. recognition rate and run-
time. We also provide a realistic comparison with
kooaba, indicating the benefits of the proposed so-
lution. Finally we use this pipeline to overcome the
limit of a state-of-the-art solution for mobile Aug-
mented Reality on the number of tracking targets,
extending its scale significantly without introducing
huge delays caused by server-side recognition.
2 RELATED WORK
Objects captured with mobile phone cameras may dif-
fer largely in appearance when compared with im-
ages obtained in a controlled environment. Conse-
quently, local image features are a reasonable choice
for representation, abstracting from custom acquisi-
tion conditions. Local image features typically re-
quire initial keypoint localization and can be divided
into two broad groups. While the first group can
be represented as a feature-vector (e.g., SIFT (Lowe,
2004), SURF (Bay et al., 2008)), the second group
is computed from pixel differences and stored as a
binary string. VLAD (J
´
egou et al., 2010) is a low-
dimensional descriptor designed for large-scale re-
trieval employing product quantization for compres-
sion. However, this requires pre-computing SIFT
descriptors, which is slow on current mobile de-
vices. Binary feature descriptors like BRIEF (Calon-
der et al., 2010), ORB (Rublee et al., 2011), BRISK
(Leutenegger et al., 2011) and FREAK (Alahi et al.,
2012) can be more efficiently computed and matched.
Although they take up only a fraction of the space of
traditional approaches, they are in general not as ac-
curate. A recent approach called BinBoost (Trzcinski
et al., 2013) finds a low-dimensional but highly dis-
criminative binary descriptor using supervised learn-
ing. The resulting descriptors feature accuracy com-
parable to floating point descriptors, however, the
generation process is of computational complexity
similar to SIFT.
Recognition with local features can be realized
by feature matching and subsequent robust (e.g.,
RANSAC (Fischler and Bolles, 1981)) verification of
the spatial layout by a suitable model. For a larger
number of images, an approximation of nearest neigh-
bor computation or quantization of features is re-
quired (Marius Muja and Lowe, 2009). The latter is
realized in the popular bag of words model (BOW),
where features are quantized using a vocabulary of
visuals words obtained by clustering all feature de-
scriptors (Sivic and Zisserman, 2003). Images are
then classified using a suitable scoring scheme (e.g.,
TF-IDF). However, the vocabulary can become very
large, making both storage and retrieval infeasible.
By hierarchically clustering the available features, the
BOW model is applicable to problems of larger scale
(Nister and Stewenius, 2006).
Performance can be further enhanced by taking
into account the context of local features (Wang et al.,
2011). Although this gives better recognition perfor-
mance, the overhead in memory consumption is pro-
hibitive in a mobile context. Initial results obtained by
the vocabulary tree may be improved using tree-based
re-ranking as an additional step before performing ge-
ometric verification (Tsai et al., 2010). With a larger
number of classes, the dominant factor is the size of
the inverted index in the vocabulary tree, which can
be compressed (Chen et al., 2010).
It must be noted that binary descriptors generally
violate the assumption that points can be represented
by cluster centers (Trzcinski et al., 2012). This causes
lower performance compared with floating point de-
scriptors in typical scenarios. This can be overcome
by randomizing at the cost of additional overhead.
The aim of previous work in mobile visual search
was mainly to reduce the amount of data that needs
to be transferred to a server performing the actual
search operation (Girod et al., 2011) (Ji et al., 2011).
This applies to the standard pipeline using the vocab-
ulary tree, but also to alternative approaches, which
convert the feature-vector to a binary representation
(Zhou et al., 2012) or perform hashing (He et al.,
2012). Compressing keypoint locations (Tsai et al.,
2009) or using special descriptors further help to re-
duce transmission time (CHOG (Chandrasekhar et al.,
2012)). Still, the initial latency caused by current mo-
bile networks may degrade usability, which is critical
in a mobile context.
Current services for visual search have large de-
lays with only little dependence on image resolution
(see Section 4.3). Consequently, it seems interest-
ing to investigate visual search from a client-side per-
spective. We choose the traditional vocabulary tree
pipeline for reasons of efficiency, extensibility and
popularity. However, we neither transfer the image
nor descriptors to a server and perform all processing
locally on the mobile device.
Prior art closest to the proposed approach is given
by (Henze et al., 2009). They use heavily opti-
mized local features that are known to sacrifice scale-
invariance. The authors only provide a user study on
the performance of the system that deals with a rather
small number of images. In contrast, in our work we
modify selected parts of the pipeline to account for
special requirements of mobile setups such as lim-
ited processing power and storage capabilities, but
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
126
also to allow better scaling to a larger number of im-
ages. We provide an extensive evaluation of standard
datasets with current-off-the-shelf hardware. Thus we
describe a system that is half-way between an online
visual search solution and a real-time system. Per-
forming the search locally on the device allows for
instant responses, while we are able to limit the mem-
ory consumption on current off-the-shelf smartphones
for image databases of reasonable size.
3 MOBILE APPROACH
The major goal of performing mobile visual search on
the client is to reduce the large round-trip time of cur-
rent server-side solutions. Runtime is a very critical
factor for mobile applications, and failure to deliver in
this area may lead to immediate rejection by the user.
Due to constraints in processing power and memory,
it is not possible to duplicate a conventional server-
side solution onto a mobile device. This also means
that the scale of a mobile solution will be consider-
ably smaller than a server-side system, as all informa-
tion needs to be stored on the device itself. The size
of applications packages is also critical, as they are
typically downloaded by the device over 3G or Wi-Fi
networks. Consequently, we need to keep both run-
time and storage requirements at a reasonable level so
that the problem remains computationally feasible on
current mobile devices. With these considerations in
mind, we first implemented a suitable pipeline for vi-
sual search and ported it to mobile devices. We then
added various modifications so that the pipeline can
be used in a realistic scenario employing a large num-
ber of image classes or categories, still working in in-
stant time entirely on the mobile device.
3.1 Overview
Our pipeline largely follows the standard concept for
visual search. We perform keypoint detection and
feature extraction on an input image resized to a de-
sired maximum dimension and hand over this data to
a vocabulary tree structure for initial classification.
For reasons of efficiency, we perform flat scoring at
the leafs. In this step, we pipe each feature descrip-
tor down the tree, accumulate normalized visit counts
stored during training for each class and weight them
by the corresponding entropy. The final result is re-
ported as the index which corresponds to the maxi-
mum of the accumulation vector.
We improve our results in a subsequent verifica-
tion step with a suitable number of candidates (see
Figure 2). We serialize both tree data and key-
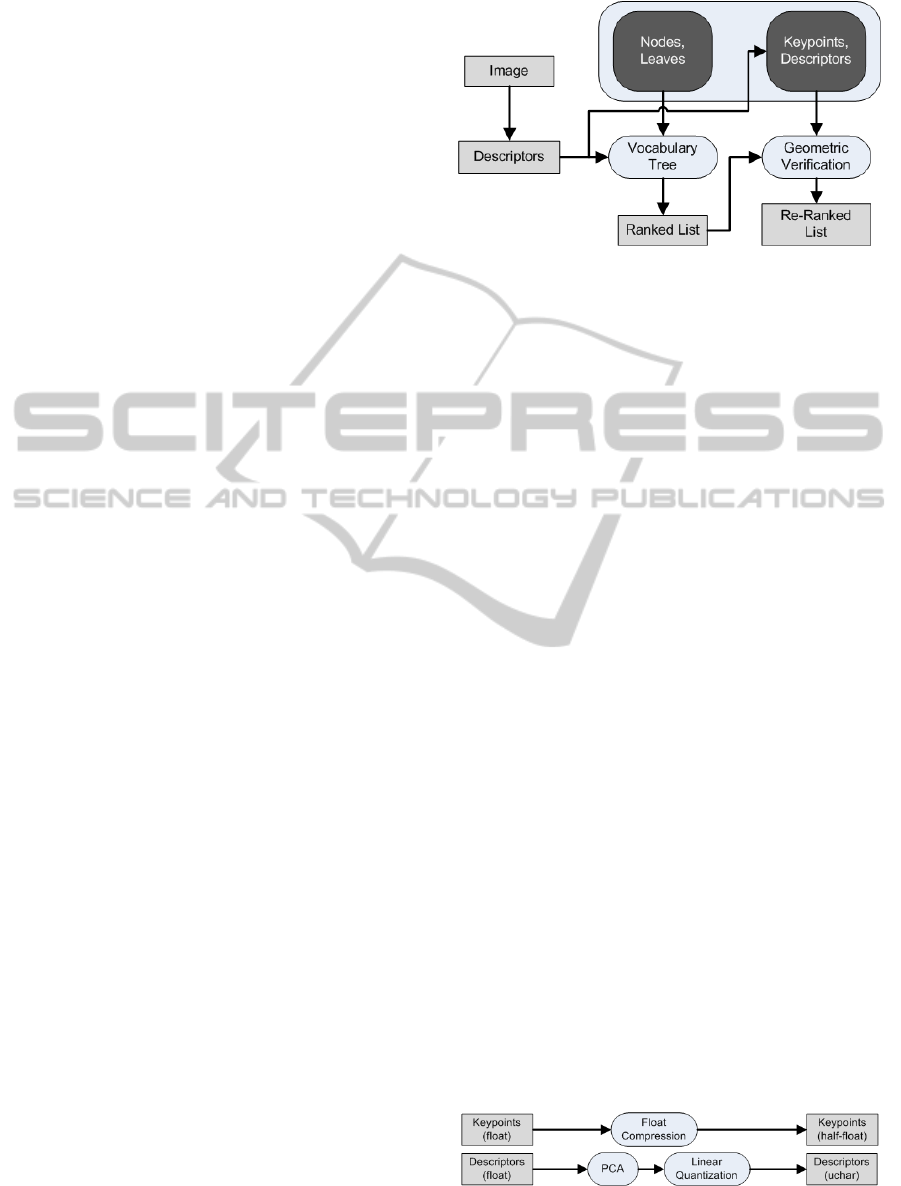
Figure 2: Overview of a local visual search pipeline: image
descriptors are extracted and initially classified using a vo-
cabulary tree built from suitable training data; this result is
subsequently refined during geometric verification.
point/feature descriptor data created during training.
While the first is kept in main memory for reasons of
speed, the latter is read on demand from flash memory
during geometric verification. Since we mainly target
planar objects in this work, we employ robust homog-
raphy estimation using RANSAC to re-rank the list
obtained from the vocabulary tree (Hartley and Zis-
serman, 2003).
3.2 Modifications for Mobile
Application
We made various enhancements to the standard ap-
proach for visual search to improve both runtime and
memory requirements. Descriptor computation is a
critical task in this type of application, as it tends
to have a comparatively large runtime. We modified
the current implementation of OPEN-SURF (Evans,
2009) by speeding up integral image computation, but
also by employing modifications in the final step of
descriptor computation. More specifically, we use
a grid-size of 3x3 for 36 dimensions in the feature
vector. This yields considerable savings in runtime
during descriptor computation and geometric verifica-
tion, but also in terms of storage. Memory consump-
tion is critical, as it influences both installation time
and startup time. We reduce requirements in main
memory (tree structure) but also in flash memory
(keypoints/descriptors) by using half-precision float
values throughout the pipeline. In particular, this af-
fects keypoint data and vocabulary tree data (see Fig-
ure 3). In addition, we compress descriptor data by
Figure 3: Pipeline for compressing local features: keypoint
locations are compressed into half precision values and de-
scriptors are linearly quantized with optional PCA.
Client-sideMobileVisualSearch
127

linear quantization into a single byte per dimension.
Optionally, we perform PCA (Pearson, 1901) to re-
duce the number of initial dimensions before linear
quantization. We also employ compression of in-
verted index data by recursive integer coding (Mof-
fat and Anh, 2005), targeting specifically the burden
on main memory caused by a large number of image
classes. It must be noted that we decompress all data
on-the-fly during program execution, working solely
on the mobile CPU. We will evaluate this client-side
pipeline w.r.t. runtime and memory consumption in
detail in the next section.
4 EVALUATION
We first evaluate the local pipeline w.r.t. recognition
performance, runtime and memory requirements di-
rectly on a Samsung Galaxy S3 mobile phone. This
is a an off-the-shelf smartphone with an ARM-Cortex
A9 CPU (up to 1.4 GHz) and 1 GB of main mem-
ory running Android. Information about the perfor-
mance on this device allows to estimate behavior on
most smartphones or tablets currently in use. We then
evaluate recognition performance using the commer-
cial recognition service kooaba. This allows to clearly
show the behavior of our pipeline compared to a state-
of-the-art solution for image retrieval.
4.1 Metrics and Datasets
In general, we report recognition rate (relative amount
of candidates classified correctly), runtime (descrip-
tor computation, vocabulary tree, geometric verifica-
tion) and the size of serialized data for the vocabulary
tree and keypoints/descriptors. If not noted otherwise,
runtime is given in milliseconds (ms) and memory us-
age is reported in megabytes (MB). Based on informal
experiences with acceptable recognition latency, we
set the upper runtime limit of a local pipeline at ap-
proximately 500 ms on current off-the-shelf devices.
We use several datasets in our evaluation (see Ta-
ble 1). The posters dataset was created mainly to be
able to evaluate behavior with various image trans-
formations and serves for initial testing. The Mis-
souri (Wang et al., 2011) and in particular the Stan-
ford (Chandrasekhar et al., 2011) dataset represent
typical objects and operating conditions encountered
in mobile visual search. Especially the latter is inter-
esting in our context, as it contains more than 1000
classes. Finally, the UK-Bench
3
dataset is included
here to be able to evaluate the behavior of the pipeline
3
www.vis.uky.edu/ stewe/ukbench
Table 1: Most datasets used in our evaluation represent typ-
ical operating conditions for mobile visual search; the uk-
bench dataset allows evaluations of larger scale.
Name Categories Images Light Clutter Distortion
Posters 11 11 x x
Missouri Mobile 5 400 x x x
Stanford MVS 8 1193 x x x
UK-Bench 2550 10200 x x
Table 2: Local pipeline: performance and runtime of var-
ious local features on the posters dataset; R...resolution,
D...type of feature, P...recognition performance, F...feature
computation, T...vocabulary tree, V...geometric verification.
R D P F T V Sum
train/test [ms] [ms] [ms] [ms]
320/320 SIFT 0.8170 1269 21 180 1470
320/320 SURF 0.8568 604 9 58 671
320/320 OSURF 0.7829 208 8 59 275
320/320 OSURF36 0.7784 126 4 43 173
320/480 OSURF36 0.8409 208 6 34 248
with a larger number of image classes. This dataset is
not very representative for mobile visual search, how-
ever, as it also contains different views of non-planar
objects, sometimes captured on very textured back-
ground. Since there is no test set given, it requires
computation of a different metric for evaluation (uky-
score).
Although the scale of these experiments is rela-
tively small compared to server-side systems from lit-
erature, it seems to be a common practice to create
larger datasets by insertion of an arbitrary amount
of distractor images. In contrast to our evaluation
methodology, a comparison is much more difficult in
these cases. The posters dataset is available from the
authors upon request.
4.2 Evaluation of the Local Pipeline
We first evaluate the system to determine suitable pa-
rameters for feature descriptors and geometric verifi-
cation. Then, we determine the influence of compres-
sion on recognition rate, runtime and memory con-
sumption. In a final step, we evaluate our pipeline
with a considerably larger number of classes. This
allows to come up with a clear statement on perfor-
mance and practical usability on current mobile hard-
ware.
4.2.1 Descriptors and Geometric Verification
We evaluated the influence of the number of can-
didates used in geometric verifcation on recognition
rate and runtime for the posters dataset (see Figure
5). We evaluate various feature descriptors for use
in our pipeline with the posters dataset (compression
switched off). In order to facilitate the comparison of
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
128
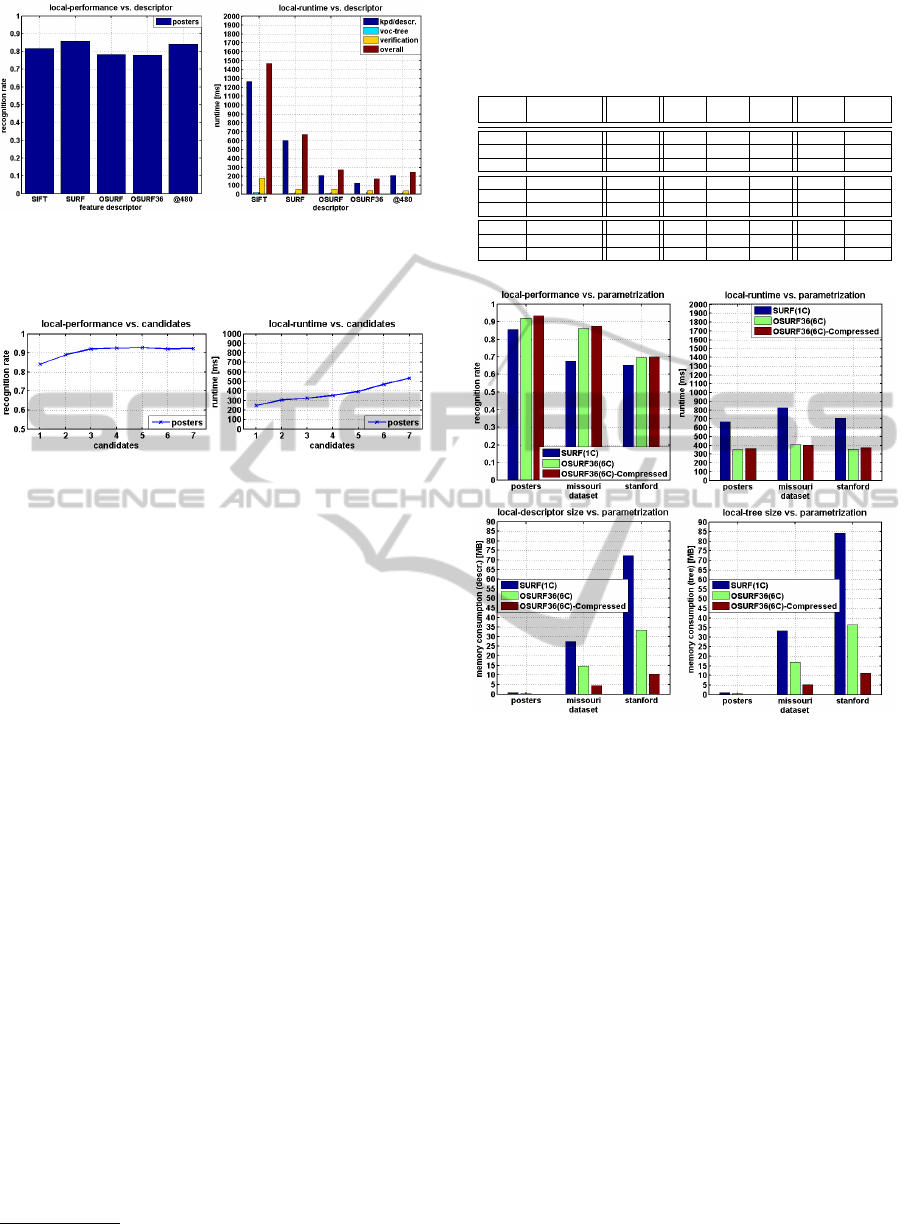
Figure 4: Local pipeline: performance and runtime of vari-
ous feature descriptors on the posters dataset; our modified
SURF descriptor provides reasonable performance but takes
up less runtime compared to the unmodified variants.
Figure 5: Local pipeline: effect of geometric verification
on the posters dataset; performance saturates around three
candidates
results, we also evaluate SIFT and SURF
4
. We use a
maximum extension for the input image of 320 pix-
els and limit the maximum number of keypoints to
256. Geometric verification is enabled, but configured
to just use one candidate. From Table 2 and Figure
4, it is evident that we obtain reasonable recognition
performance with the evaluated feature types. How-
ever, runtime of certain setups such as SIFT or SURF
is prohibitive for current mobile devices considering
our runtime budget of approx. 500 ms. Our modi-
fied OPEN-SURF descriptor with just 36 dimensions
takes only a fraction of runtime compared to SURF.
However, recognition rate is around 10% lower. As
runtime is comparatively low, we can also process im-
ages of higher-resolution (e.g., 480 pixels). In this
case, we can roughly match the recognition rate of
SURF. Still, runtime is less than 50% compared to
SURF. In particular, runtime for geometric verifica-
tion is shorter, which is also due to the reduced size
of the descriptor. So, it is possible to use more can-
didates for a given runtime budget. We see that run-
time scales approx. linearly in the number of can-
didates. Similarly, recognition rate improves with
an increasing number of candidates. Although per-
formance seems to saturate starting with three can-
didates for the posters dataset, we choose to use six
candidates for our modified OPEN-SURF descriptor,
as runtime is still around 500 ms. Based on our run-
time budget, we can only compare the performance
4
http://opencv.org
Table 3: Local pipeline: effect of compressing key-
points and descriptors; N...name of dataset, D...type of fea-
ture, F...feature computation, P...recognition performance,
T...tree, V...geometric verification.
N D P F T V T F
[ms] [ms] [ms] [MB] [MB]
Post. SURF 0.8568 604 9 58 0.98 0.79
Post. OSURF36 0.9204 212 6 135 0.49 0.41
Post. OSURF36C 0.9329 211 16 136 0.15 0.12
Miss. SURF 0.6751 742 15 68 33.2 27.5
Miss. OSURF36 0.8623 248 9 180 16.9 14.6
Miss. OSURF36C 0.8759 225 26 151 5.14 4.61
Stanf. SURF 0.6550 640 14 58 84.1 72.2
Stanf. OSURF36 0.6940 216 9 134 36.4 33.5
Stanf. OSURF36C 0.7000 216 26 134 11.1 10.5
Figure 6: Local pipeline: detailed evaluation of compres-
sion on various datasets; compared with standard SURF, up
to 85% of storage space can be saved at negligible runtime
overhead and slightly increased performance
of our modified descriptor to SURF using a single
candidate for verification. In Table 3 and Figure 6,
we present the results of this setup with the Missouri
and Stanford datasets. Compared with the baseline,
our modified OPEN-SURF descriptor offers 5%-20%
better performance in this setup, but takes up only half
of the runtime of SURF. Still, memory requirements
for tree and descriptors are comparatively high, espe-
cially for the Stanford dataset.
4.2.2 Compression
In order to tackle increasing memory requirements,
we compress both descriptors and the tree structure.
The effect of these measures can be seen in Table 3
and Figure 6. Our compression efforts significantly
reduce memory requirements, while the effect on run-
time is negligible. By employing the proposed mod-
Client-sideMobileVisualSearch
129
ifications, up to 85% of storage space can be saved
over standard SURF. Interestingly, there is a small in-
crease in recognition performance when compression
is enabled. This may be due to a reduction in noise
caused by our quantization scheme.
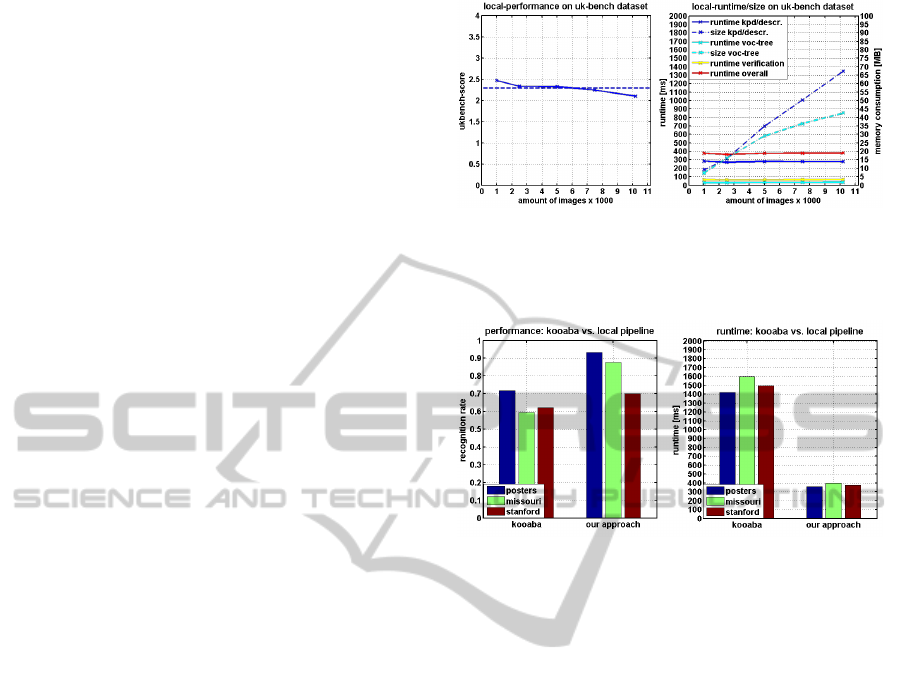
4.2.3 Scalability
In this experiment, we determine large-scale perfor-
mance on the UK-Bench dataset. We perform this
test on a Samsung Galaxy S3 smartphone and en-
able compression of keypoints and descriptors, but
also the inverted index stored in the vocabulary tree.
From Figure 7, it is evident that our pipeline scales
well concerning recognition rate, runtime and main
memory consumption. It is possible to manage more
than 10000 classes with the current pipeline, using
less than 110 MB of total storage space. Only a frac-
tion (approx. 50 MB) of data needs to be loaded into
main memory. On the one hand, the overall scores
obtained in this experiment are lower than those re-
ported in literature, as our parametrization is targeted
towards practical applicability on mobile devices. On
the other hand, it does not seem reasonable for this
kind of application to train a class for each view of an
object. As current mobile devices feature 1-2 GB of
main memory and at least 16 GB of flash storage, this
purely client-side approach is estimated to be able to
handle an amount of images that is around 1-2 mag-
nitudes higher.
4.3 Comparison with Kooaba
For this experiment, we uploaded relevant reference
images into a single group and deactivated all images
not relevant to the current experiment or dataset. We
then performed queries over a Wi-Fi internet connec-
tion. This can be considered a very optimistic setup
compared to current mobile phone networks.
According to initial tests, the query resolution has
little influence on runtime and recognition rate. We
scale down query images to a maximum extension of
320 pixels, which is rather common for mobile appli-
cations. From Figure 8, we see that the posters dataset
performs best (approx. 0.7) on kooaba. With the
Missouri and Stanford datasets, performance drops by
around 10%. Compared to our client-side approach,
overall performance per dataset is significantly lower
(5-25%).
However, the client-side approach has lower per-
formance for the print category of the Stanford dataset
(see Figure 9). As text in general features many key-
points, this drop is likely to be caused by the imposed
keypoint limit of our approach. It must be noted that
the performance for the landmark category is low for
Figure 7: Local pipeline: testing scalability with the UK-
Bench dataset on a Samsung Galaxy S3 mobile phone; our
pipeline scales well concerning recognition rate, runtime
and main memory consumption
Figure 8: Comparison of server-side mobile visual search
(kooaba) and client-side mobile visual search; our client-
side solution offers significantly better recogniton and run-
time performance
both approaches. This may be caused by the fact that
the publicly available training set consists of several
images of the same object, each having a separate
class. This is not a common application scenario for
visual search, however.
For this experiment, runtime of kooaba is around
1500 ms, where the Missouri dataset has a higher run-
time than the other two (see Figure 8). For our setup
the bottleneck currently seems to lie in the recognition
engine itself, rather than connection speed.
All in all, the client-side solution offers signifi-
cantly better recognition performance on the evalu-
ated datasets compared with a state-of-the-art server-
side solution. However, the latter performs better in
the print category. A local pipeline giving a result
in approximately 500 ms, can therefore compete in
recognition performance with a server-side solution
which takes three times the runtime.
5 MOBILE PROTOTYPE
APPLICATION
We built a mobile prototype for Android smartphones
and tablets demonstrating client-side mobile visual
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
130
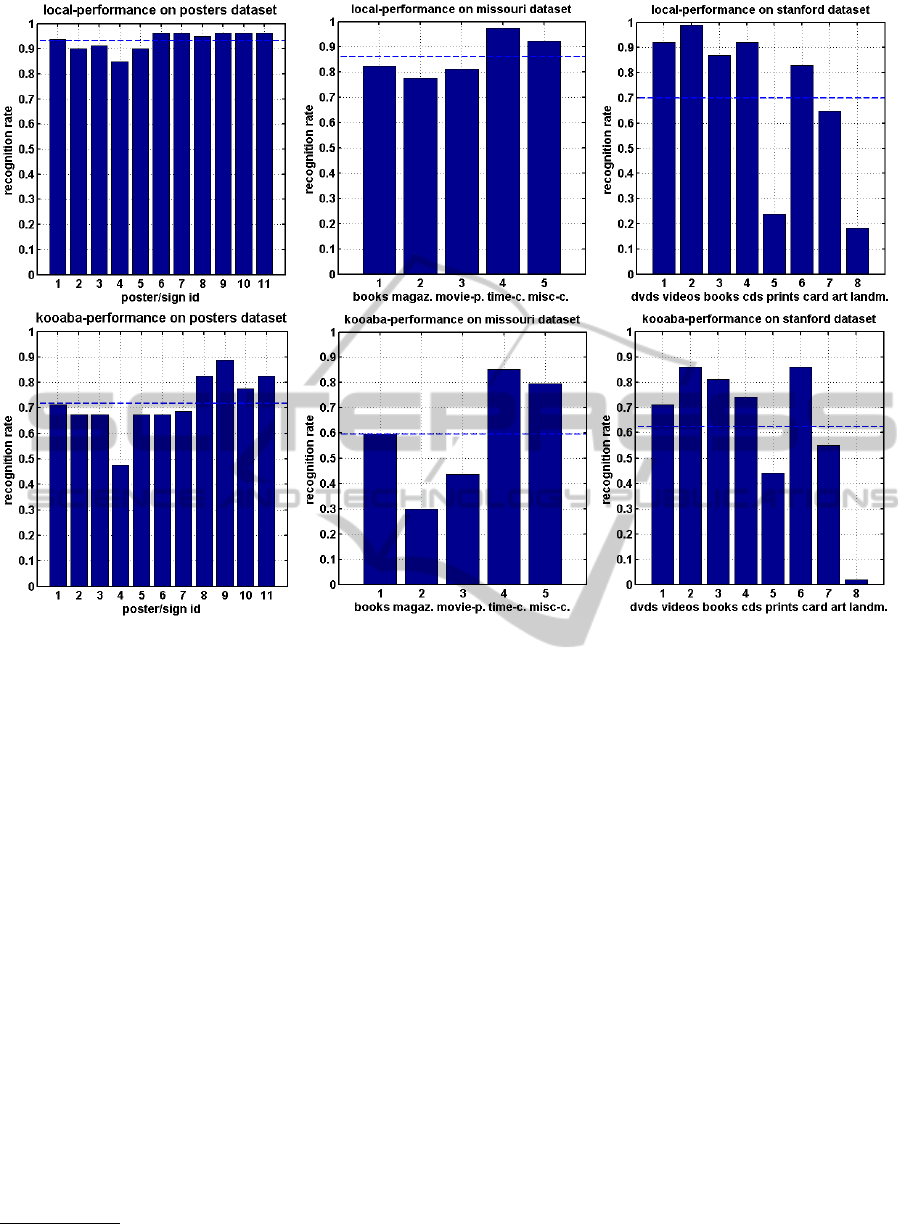
Figure 9: Detailed evaluation for the local pipeline and kooaba; top row: local pipeline, bottom row: kooaba; our client-side
approach delivers significantly improved recognition performance for all datasets and categories except print (keypoint limit)
search but also server-side visual search using kooaba
(see Figure 1). Similar to popular search engines, we
give a list of candidates in the form of preview im-
ages, which may be activated to trigger a web-based
search in order to get additional information.
We also use our client-side module for visual
search to extend the amount of realistically usable
tracking targets within the Vuforia SDK
5
for mobile
Augmented Reality. In this case, we can instantly
select a matching tracking dataset without requiring
user intervention or costly server-side recognition.
We successfully tested this setup with several hundred
image targets. Due to limitations in the SDK, we can-
not provide a detailed evaluation, however.
6 CONCLUSIONS
We optimized a traditional visual search system to
decrease runtime and also storage space in order to
scale to thousands of training images on current off-
the-shelf smartphones. Compared with a standard
5
https://www.vuforia.com
pipeline, we achieve up to a two-fold speed-up in run-
time, save 85% of storage space and provide substan-
tially increased recognition performance. We com-
pared performance and runtime with the commer-
cial service kooaba and deliver considerably better
recognition performance at a fraction of runtime. We
demonstrated practical applicability in a prototype for
mobile visual search on mobile devices running An-
droid. In addition, we integrated the pipeline with a
popular AR SDK and used it as a preselector for track-
ing datasets. Consequently it is possible to instantly
use a large number of tracking targets without requir-
ing user intervention or costly server-side recognition
Improvements could be made on various levels.
We treat those as future work and will list them
briefly: Descriptor computation should be accelerated
further, possibly by using the GPU for part of the pro-
cessing. This would certainly lead to an even more re-
sponsive system, but might also improve recognition
rate by relaxing the current limitation on the num-
ber of keypoints/feature descriptors. As their size
again poses a problem for huge numbers of classes,
they should be further compressed (e.g., variable-rate
quantization).
Client-sideMobileVisualSearch
131

For current server-based visual search systems it
seams reasonable to run a combination of server-side
and client-side recognition. Then, the client could be
configured to instantly recognize just a small subset
of currently popular classes. This would provide both
large-scale capability and instant recognition.
ACKNOWLEDGEMENTS
This work is supported by Bundesdruckerei GmbH.
REFERENCES
Alahi, A., Ortiz, R., and Vandergheynst, P. (2012). Freak:
Fast retina keypoint. In CVPR, pages 510–517.
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. V. (2008).
Speeded-up robust features (surf). Computer Vision
and Image Understanding, 110(3):346–359.
Calonder, M., Lepetit, V., Strecha, C., and Fua, P. (2010).
Brief: binary robust independent elementary features.
In ECCV, pages 778–792.
Chandrasekhar, V.and Takacs, G., Chen, D. M., Tsai, S.,
Reznik, Y.and Grzeszczuk, R., and Girod, B. (2012).
Compressed histogram of gradients: A low-bitrate de-
scriptor. International Journal of Computer Vision,
96(3):384–399.
Chandrasekhar, V. R., Chen, D. M., Tsai, S. S., Cheung,
N.-M., Chen, H., Takacs, G., Reznik, Y., Vedantham,
R., Grzeszczuk, R., Bach, J., and Girod, B. (2011).
The stanford mobile visual search data set. In MMSys,
pages 117–122.
Chen, D. M., Tsai, S. S., Chandrasekhar, V., Takacs, G.,
Vedantham, R., Grzeszczuk, R., and Girod, B. (2010).
Inverted index compression for scalable image match-
ing. In IEEE DCC, page 525.
Evans, C. (2009). Notes on the opensurf library. Technical
Report CSTR-09-001, University of Bristol.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Commun. ACM, 24(6):381–395.
Girod, B., Chandrasekhar, V., Chen, D. M., Cheung, N.-M.,
Grzeszczuk, R., Reznik, Y. A., Takacs, G., Tsai, S. S.,
and Vedantham, R. (2011). Mobile visual search.
IEEE Signal Processing Magazine, 28(4):61–76.
Hartley, R. and Zisserman, A. (2003). Multiple View Geom-
etry in Computer Vision. Cambridge University Press,
New York, NY, USA, 2nd edition.
He, J., Feng, J., Liu, X., Cheng, T., Lin, T.-H., Chung, H.,
and Chang, S.-F. (2012). Mobile product search with
bag of hash bits and boundary reranking. In CVPR,
pages 3005–3012.
Henze, N., Schinke, T., and Boll, S. (2009). What is that?
object recognition from natural features on a mobile
phone. In Workshop on Mobile Interaction with The
Real World.
J
´
egou, H., Douze, M., Schmid, C., and P
´
erez, P. (2010).
Aggregating local descriptors into a compact image
representation. In CVPR, pages 3304–3311.
Ji, R., Duan, L.-Y., Chen, J., Yao, H., Rui, Y., Chang, S.-
F., and Gao, W. (2011). Towards low bit rate mobile
visual search with multiple-channel coding. In ACM
MM, pages 573–582.
Leutenegger, S., Chli, M., and Siegwart, R. (2011). Brisk:
Binary robust invariant scalable keypoints. In ICCV,
pages 2548–2555.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Marius Muja, M. and Lowe, D. G. (2009). Fast approximate
nearest neighbors with automatic algorithm configura-
tion. In VISAPP, pages 331–340.
Moffat, A. and Anh, V. N. (2005). Binary codes for non-
uniform sources. In IEEE DCC, pages 133–142.
Nister, D. and Stewenius, H. (2006). Scalable recognition
with a vocabulary tree. In CVPR, pages 2161–2168.
Pearson, K. (1901). On lines and planes of closest fit to
systems of points in space. Philosophical Magazine,
2:559–572.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). Orb: an efficient alternative to sift or surf.
In ICCV, pages 2564–2571.
Sivic, J. and Zisserman, A. (2003). Video google: a text
retrieval approach to object matching in videos. In
ICCV, pages 1470–1477.
Trzcinski, T., Christoudias, M., Fua, P., and Lepetit, V.
(2013). Boosting binary keypoint descriptors. In
CVPR, pages 2874–2881.
Trzcinski, T., Lepetit, V., and Fua, P. (2012). Thick
boundaries in binary space and their influence on
nearest-neighbor search. Pattern Recognition Letters,
33(16):2173–2180.
Tsai, S., Chen, D. M., Takacs, G., Chandrasekhar, V.,
Vedantham, R., Grzeszczuk, R., and Girod, B. (2010).
Fast geometric re-ranking for image-based retrieval.
In ICIP, pages 1029–1032.
Tsai, S. S., Chen, D., Takacs, G., Chandrasekhar, V., Singh,
J. P., and Girod, B. (2009). Location coding for mobile
image retrieval. In MMCC, pages 8:1–8:7.
Wang, X., Yang, M., Cour, T., Zhu, S., Yu, K., and Han,
T. (2011). Contextual weighting for vocabulary tree
based image retrieval. In ICCV, pages 209–216.
Zhou, W., Lu, Y., Li, H., and Tian, Q. (2012). Scalar quan-
tization for large scale image search. In ACM MM,
pages 169–178.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
132
