
Active Contour Segmentation with Affine Coordinate-based
Parametrization
Q. Xue
1,2
, L. Igual
1
, A. Berenguel
1
, M. Guerrieri
3
and L. Garrido
1
1
Departament de Matem
`
atica Aplicada i An
`
alisi, Universitat de Barcelona, Barcelona, Spain
2
Department of Mathematics, Tongji University, Shanghai, China
3
Departament d’Inform
`
atica i Matem
`
atica Aplicada, Universitat de Girona, Girona, Spain
Keywords:
Active Contours, Affine Coordinates, Mean Value Coordinates.
Abstract:
In this paper, we present a new framework for image segmentation based on parametrized active contours. The
contour and the points of the image space are parametrized using a set of reduced control points that have to
form a closed polygon in two dimensional problems and a closed surface in three dimensional problems. By
moving the control points, the active contour evolves. We use mean value coordinates as the parametrization
tool for the interface, which allows to parametrize any point of the space, inside or outside the closed polygon
or surface. Region-based energies such as the one proposed by Chan and Vese can be easily implemented in
both two and three dimensional segmentation problems. We show the usefulness of our approach with several
experiments.
1 INTRODUCTION
Active contours have been proved to be a powerful
tool for segmentation in image processing. In ac-
tive contours an evolving interface is propagated in
order to recover the shape of the object of interest.
In a two dimensional problem, the evolving interface
is a contour whereas in a three dimensional prob-
lem the evolving interface is a surface. The inter-
face is evolved by minimizing an energy that math-
ematically expresses the properties of the object to
be segmented. In this energy functional, the terms
corresponding to image features can be either edge-
based and/or region-based. Edge-based terms mea-
sure features on the evolving interface to identify ob-
ject boundaries and are usually based on a function
of the image gradient (Caselles et al., 1997). They are
known to be sensitive to noise and thus energies based
on such type of features usually need the evolving in-
terface to be initialized near the solution.
Region-based terms were introduced by Chan and
Vese (Chan and Vese, 2001). In this case some fea-
tures that are measured inside and outside of the re-
gions allows to evolve the interface and thus drive
the energy to its minimum. Chan and Vese mini-
mize the variance of the gray-level in the interior and
exterior regions. Region-based terms are known to
be more robust to noise than edge-based terms and
thus they usually do not need the initialization to be
near the solution. Since the work of Chan and Vese
other approaches have extended the idea by measur-
ing other types of features (Rousson and Deriche,
2002; Michailovich et al., 2007). However, the lat-
ter approaches do measure the features in the whole
inner and outer regions and thus may fail if these fea-
tures are not spatially invariant. This problem has
been tackled in (Lankton and Tannenbaum, 2008),
in which the inner and outer regions are defined by
means of a band around the evolving interface. Thus,
their approach is suited for segmenting objects having
heterogeneous properties.
Depending on the representation of the evolving
interface, active contours may be classified into para-
metric or geometric ones. In parametric approaches
the interface in two dimensional problems may be de-
scribed by means of a set of discrete points (Kass
et al., 1988) or using basis functions such as B-
splines (Jacob et al., 2004). In three dimensional
problems, parametrizations using B-Splines (Barbosa
et al., 2012) have also been used. In general, using
basis functions such as B-splines allows to use less
parameters to represent the curve than directly dis-
cretizing the curve or surface and have inherent regu-
larity and hence do not require additional constraints
to ensure smoothness. Parametric contours are able
to deal easily with edge-based energies. However,
5
Xue Q., Igual L., Berenguel A., Guerrieri M. and Garrido L..
Active Contour Segmentation with Affine Coordinate-based Parametrization.
DOI: 10.5220/0004677200050014
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 5-14
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

dealing with region-based energies is more difficult,
see (Jacob et al., 2004; Barbosa et al., 2012) for in-
stance. Moreover, parametric approaches require the
user to define the number of control points that will
be used to evolve the contour and it is difficult to deal
with topological changes. This has favored that many
works have been tackled using geometric approaches.
Geometric approaches represent the evolving in-
terface as the zero level set of a higher dimensional
function, which is usually called level set function.
Therefore geometric approaches are also called level
set approaches. Level set approaches are able to cope
with the change of the curve topology and thus are
able to segment multiple unconnected regions. This
property has made level sets very popular approaches.
However, level set approaches are usually computa-
tionally more complex and difficult to deal with since
they increase the dimension of the problem by one.
This makes level sets a difficult approaches in three-
dimensional applications which are common in med-
ical image segmentation.
In this paper, we focus on parametric representa-
tions due to its computational advantages and simplic-
ity. A direct consequence of the explicit formulation
is the loss of topological flexibility. However, this
limitation is a mild constraint in many applications,
where the goal may be to simply segment one con-
nected object and thus the topological flexibility of
the level sets is not needed.
We contribute with a novel framework for seg-
menting two and three dimensional connected ob-
jects using a new class of parametric active contours.
The parametrization is based on a class of deformable
models well known in computer graphics such as the
animation of characters for video games or movies.
Such models are usually made up of millions of tri-
angles. The motion of the character is controlled by
a reduced number of control points: when these con-
trol points move the associated character deforms ac-
cordingly. A similar idea is applied in our paper: the
evolving interface, the interior and exterior regions
are parametrized by a set of control points. When
these control points move the interface evolves cor-
respondingly to the object to be segmented.
Our work stems from the ideas of free-form de-
formations (Faloutsos et al., 1997; Coquillart, 1990).
Free-form deformations have been actively used for
medical image registration (Rueckert et al., 1999).
However, to the best of our knowledge, free-form de-
formations have not been used for parametric active
contours. In our work we use the mean value co-
ordinates as the parametrization tool for the evolv-
ing interface (Floater, 2003). Mean value coordinates
have several advantages over free-form deformation,
namely that control points only need to form a closed
polygon in two dimensional problems (or surface in
three dimensional problems) that may have any shape.
Any point of the space, inside or outside of this poly-
gon (or surface), can be parametrized with respect to
the control points. For free-form deformations the
control points need to form a regular shape and only
interior points can be parametrized.
The rest of the paper is organized as follows: Sec-
tion 2 reviews the related state-of-the-art work. Sec-
tion 3 introduces the proposed segmentation method.
Section 4 gives the implementation details. Section 5
shows the experimental results. Finally, Section 6
concludes the paper.
2 RELATED WORK
In this Section, we review the state-of-the-art liter-
ature in level set techniques and computer graphic
techniques related to our work.
2.1 Active Contours
The classic method of segmentation of Kass et
al. (Kass et al., 1988) minimizes the following energy
E(C ) = α
Z
1
0
C
0
(p)
2
d p + β
Z
1
0
C
00
(p)
2
d p
− λ
Z
1
0
k
∇I(C (p))
k
d p. (1)
where C (p) : [0,1] → R
2
is an Euclidean parametriza-
tion of the evolving interface and I : R
2
→ R is the
gray level image. As commented previously two dif-
ferent approaches may be used to represent C , namely
parametric active contours and level sets. The former
is based on directly discretizing the curve C by means
of a set of points and letting these points evolve inde-
pendently. The level set methods are based on embed-
ding the curve C in a higher dimensional function φ
which is defined over all the image. Instead of evolv-
ing the curve C , the function φ is evolved. The curve
C corresponds to the zero level curve of φ.
Rather than only using information on the inter-
face, Chan and Vese proposed a method to evolve a
curve by minimizing the variance in the interior re-
gion, Ω
1
, and exterior region, Ω
2
, defined by C (Chan
and Vese, 2001), see Figure 4. The energy the authors
minimize is
E(C ) =
1
2
ZZ
Ω
1
(I − µ
1
)
2
dx dy+
1
2
ZZ
Ω
2
(I − µ
2
)
2
dx dy, (2)
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
6
where the original terms based on the contour length
and area of Ω
1
have been dropped for simplicity. In
Equation (2), the image I : R
2
→ R corresponds to
the observed data. The µ
1
and µ
2
refer to mean in-
tensity values in the interior and exterior regions, re-
spectively. In order to minimize the previous energy,
authors use a level set method. They first compute
the corresponding Euler-Lagrange equations and then
discretize the evolution equations. The successive it-
erations of the evolution equations allows to evolve φ
and thus the interface C .
2.2 Mean Value Coordinates
An important problem in computer graphics is to de-
fine an appropriate function to linearly interpolate
data that is given at a set of vertices of a closed con-
tour or surface. Such interpolants can be used in ap-
plications such as parametrization, shading or defor-
mation. The latter application is our main interest in
this work and thus we will discuss it next. In this sec-
tion we will first focus on the two dimensional case
and afterwards we will discuss some details regarding
the extension to the three dimensional case.
Gouraud (Gouraud, 1971) presented a method to
linearly interpolate the color intensity at the interior
of a triangle given the colors at the triangle vertices.
Assume the triangle has vertices {v
1
,v
2
,v
3
} and cor-
responding color values { f
1
, f
2
, f
3
}. The color value
of an interior point p = (x, y) of this triangle can be
computed as follows
ˆ
f [p] =
∑
j
w
j
f
j
∑
j
w
j
, (3)
where w
j
is the area of the triangle given by vertices
{p,v
j−1
,v
j+1
}.
Many researchers have used these type of inter-
polants for mesh parametrization methods (Hormann
and Greiner, 2000; Floater, 2003)) as well as free-
form deformation methods (Coquillart, 1990) among
others. Both applications require that a point p be rep-
resented as an affine combination of the vertices of an
closed contour given by vertices v
i
:
p =
∑
i
w
i
v
i
∑
i
w
i
, (4)
and we say that the coordinate function
w
i
∑
j
w
j
(5)
is the corresponding affine coordinate of the point p
with respect to the vertices v
i
.
A wealth of approaches have been published for
the computation of the affine coordinates w
i
. We may
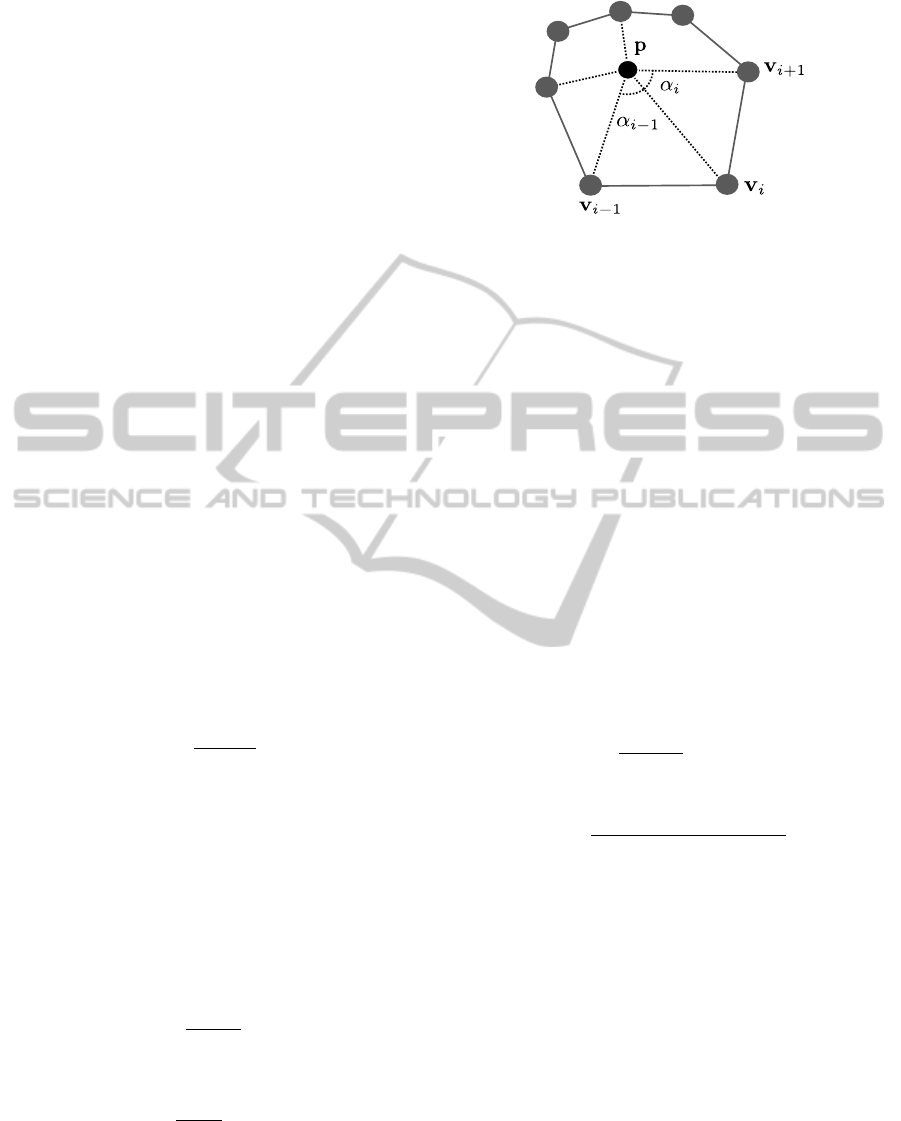
Figure 1: For a given point p, the mean value coordinate
associated to point v
i
is computed using v
i
, v
i−1
and v
i+1
.
mention those that have interest for deformation ap-
plications, namely mean value coordinates (Floater,
2003), positive mean values coordinates (Lipman
et al., 2007), harmonic coordinates (Joschi et al.,
2007) or Green coordinates (Lipman et al., 2008).
Among them, the mean value coordinates are easy to
compute and therefore we have selected them in our
work.
Mean value coordinates were initially proposed
for mesh parametrization problems (Floater, 2003).
The author demonstrated that the interpolation gen-
erated smooth coordinates for any point p inside the
kernel of a star-shaped polygon. Later on, in (Hor-
mann and Floater, 2006) it was demonstrated that
mean value coordinates extended to any simple pla-
nar polygon and to any point p of the plane.
Assume the set of vertices v
j
, j = 1 ...N, of a sim-
ple closed polygon, is given. For a point p ∈ R
2
, its
mean value coordinates ϕ
i
(p) are computed as
ϕ
i
(p) =
w
i
∑
N
j=1
w
j
i = 1 ...N, (6)
where
w
i
=
tan(α
i−1
/2) + tan(α
i
/2)
||v
i
− p||
, (7)
and kv
i
− pk is the distance between the vertex v
i
and
p, and α
i
is the signed angle of [v
i
,p,v
i+1
], see Fig-
ure 1.
Given the affine coordinates ϕ
i
(p) of a point p, the
point p can be recovered with
p =
N
∑
i=1
ϕ
i
(p)v
i
. (8)
If the vertices v
i
of the polygon move to positions v
0
i
,
the “deformed” point p
0
can be recovered as
p
0
=
N
∑
i=1
ϕ
i
(p)v
0
i
, (9)
see Figure 2.
For a given a set of points {p} the affine coordi-
nates are computed in an independent way for each
ActiveContourSegmentationwithAffineCoordinate-basedParametrization
7

Figure 2: Example of the deformation of a region by means
of a closed polygon. From left to right: a polygon vertex v
i
is moved producing the consequent deformation of the re-
gion after applying the interpolation function. Pixels near
the moved vertex v
i
are affected more than pixels father
away due to the distance in the denominator of Equation (7).
point as described in this section. If a point v
i
of the
polygon is stretched in a particular direction, all the
points {p} follow the same direction with an associ-
ated weight given by ϕ
i
(p). The points p that are near
the moved vertex have higher weights (see denomina-
tor of Equation (7)) and thus suffer a larger “deforma-
tion” than the points which are farther away. Figure 2
and Figure 3 show an example to illustrate this phe-
nomena. In Figure 2 we schematically show how a
cloud of points can be deformed if one of the polygon
vertices is moved. Figure 3 depicts the influence of
the polygon vertex distance to a curve. In this exam-
ple mean value coordinates have been used to repre-
sent the curve with respect the closed polygon. On
the left column, the initial configurations are shown.
The polygon, made up of 16 vertices, is shown with a
solid line whereas the curve to deform with a dashed
line. From top to bottom, different initializations for
the polygon are shown: the first two rows are asso-
ciated to polygon outside the curve whereas the last
row is associated to a polygon inside the curve. The
second and third column show how the curve is de-
formed when a control point of the polygon is moved.
As can be seen, the movement of the polygon pro-
duces a smooth deformation of the curve. The closer
the polygon to the curve, the higher the deformation
is applied to the curve.
In the three dimensional case a point p will be de-
scribed with respect to a closed surface made up of
triangles with vertices v
i
. The algorithm to compute
the mean value coordinates ϕ
i
(p) for a point p ∈ R
3
is described in (Ju et al., 2005). However, we would
like to point out here that Equations (6) and (9) are
still valid in the three dimensional case. Thus, it is
relatively easy to extend any two dimensional method
to the three dimensional case.
Equations (6) and (9) are the basis for the methods
we have developed in our work. The closed polygon
or surface can be interpreted as a cage that encloses
the object to deform. In the context of our work, the
control points are the cage vertices. The interior and
Figure 3: The curve deformation for different polygon
movements: external polygon (first and second row) and
internal polygon (third row). The polygon is shown as solid
line and the evolving curve as dashed line.
exterior region points will be described with respect
to these cage points using the affine coordinates. The
cage vertices will evolve according to the minimiza-
tion of an energy.
3 METHOD
Let us denote with I(p) : R
m
→ R a gray-level image,
where m = 2 (resp. m = 3) refers to a two-dimensional
(resp. three-dimensional) data. Let p be a point of R
m
and let us denote v = {v
1
,...,v
N
} the set of cage ver-
tices (or control points) associated to our parametriza-
tion. As commented previously, for m = 2 the cage
is a closed polygon whereas for m = 3 the cage is a
closed surface made up of triangles.
Let Ω
1
and Ω
2
be the set of pixels of the interior
and exterior, respectively, of the evolving interface C .
For each point p of Ω
1
and Ω
2
the affine coordinates
are computed. When a cage vertex v
i
is moved, the
points inside Ω
1
and Ω
2
are deformed accordingly
(see Figure 2). Thus, in our work the evolving inter-
face does not need to be explicitly used to determine
Ω
1
and Ω
2
.
For simplicity we concentrate on the Chan and
Vese model. However, the method can be easily ex-
tended to other types of models. The Chan and Vese
model assumes that the gray-level values of pixels in-
side Ω
1
and Ω
2
can be modelled with different mean
values. The energy functional to minimize is:
E(v) =
1
|Ω
1
|
∑
p∈Ω
1
1
2
(I(p) − µ
1
)
2
+
1
|Ω
2
|
∑
p∈Ω
2
1
2
(I(p) − µ
2
)
2
. (10)
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
8

Figure 4: For a region-based energy term the contour
(dashed line) is evolved by minimizing an energy measured
in the interior region, Ω
1
, and the exterior region, Ω
2
. For
edge-based energies the contour is evolved by minimizing
an energy on the evolving interface.
where the mean gray-level value of Ω
h
with h ∈ {1,2}
is defined as
µ
h
=
1
|Ω
h
|
∑
p∈Ω
h
I(p), (11)
and | · | denotes the cardinal of the set. The energy
model is based on a direct discretization of the energy
functional of Equation (2). In order to minimize such
equation, one approach is to compute its gradient and
use it to drive the evolution of the interface to the min-
imum. This approach is called discretized optimiza-
tion approach in the context of energy minimization
problems (Kalmoun et al., 2011).
Let v
j
= (v
j,x
,v
j,y
)
T
for m = 2 (resp. v
j
=
(v
j,x
,v
j,y
,v
j,z
)
T
for m = 3) be the coordinates of a
cage vertex. The gradient of the energy with respect
to v
j,x
is given by
∂
∂v
j,x
1
2
(I(p) − µ
h
)
2
=
(I(p) − µ
h
)
∂I(p)
∂x
∂p
∂v
j,x
−
∂µ
h
∂v
j,x
. (12)
A similar expression is obtained for the partial deriva-
tive with respect to v
j,y
and v
j,z
. The partial deriva-
tives with respect to v
j
can be expressed in a compact
form as follows
∇
v
j
1
2
(I(p)−µ
h
)
2
= (I(p)−µ
h
)(ϕ
j
(p)∇I(p)−∇
v
j
µ
h
),
(13)
where
∇
v
j
µ
h
=
1
|Ω
h
|
∑
p∈Ω
h
ϕ
j
(p)∇I(p). (14)
Thus, the gradient of E can be expressed as
∇
v
j
E(v) =
1
|Ω
1
|
∑
p∈Ω
1
(I(p) − µ
1
)(ϕ
j
(p)∇I(p) − ∇
v
j
µ
1
)
+
1
|Ω
2
|
∑
p∈Ω
2
(I(p) − µ
2
)(ϕ
j
(p)∇I(p) − ∇
v
j
µ
2
).
Note that for the computation of the gradient we have
assumed that the cardinal of sets Ω
1
and Ω
2
do not
depend on the cage vertex position. Indeed, as com-
mented before, Ω
1
and Ω
2
are made up of individual
pixels that deform as the vertex positions are moved.
As vertices move the corresponding evolving inter-
face may change its length (in two dimensional prob-
lems) or area (in three dimensional problems), but in
our implementation no pixels are added or removed
to Ω
1
and Ω
2
as the interface evolves. This approx-
imation may be correct if the deformation applied to
the cage is not grand. If the cage deforms with a big
zoom, it may be necessary to recompute, at a certain
iteration, the new set of pixels Ω
1
and Ω
2
. This idea
is similar to the one used in level sets implementation,
in which the distance function is used for the evolv-
ing function φ. Efficient implementations re-initialize
φ to a distance function only every certain iterations.
4 IMPLEMENTATION
In this Section, we describe the implementation issues
associated to our proposed method.
Assume a gray-level image I and a mask Ω
1
are
available. The mask Ω
1
can be for instance a binary
image that is an approximation to the object we want
to segment. Thus, Ω
1
will be used as initialization
to our algorithm. In the case of medical images, for
instance, this mask can be obtained by means of a
registration of the image to be segmented with an at-
las. In some cases, the mask can be manually defined
by the user. In this paper we will assume that Ω
1
is
a connected component. However, the method pre-
sented here is not restricted to this case. That is, Ω
1
may be composed of multiple connected components.
However, note that our method is not able to deal with
topological changes of Ω
1
.
Several choices are available to obtain the outer
pixels Ω
2
. For instance, Ω
2
can be taken as the set
Ω
2
= Ω \ Ω
1
, where Ω is the whole image support,
see Fig. 4. This is the way in which Ω
2
is defined for
many level set approaches and is the case in our paper.
However, other approaches are possible. For instance,
only a band around Ω
1
may be taken. This is useful in
order to avoid taking pixels that are too far away from
ActiveContourSegmentationwithAffineCoordinate-basedParametrization
9
Ω
1
, see (Lankton and Tannenbaum, 2008). Note that
pixels of Ω
1
or Ω
2
may fall outside the polygon (2D)
or surface (3D) formed by the cage vertices.
Once the set of pixels of Ω
1
and Ω
2
have been
obtained, the affine coordinates of the pixels p ∈ Ω
1
and p ∈ Ω
2
have to be computed. The affine coordi-
nates are computed using the cage vertices v which
are assumed to be given as input. Recall that for each
point p ∈ R
m
, m = 2 or m = 3, a set of N coordinates
(i.e. floating point values) are obtained, where N is
the number of cage vertices. These coordinates only
have to be computed once, before the optimization al-
gorithm is initiated.
For a given E(v), the energy is minimized using
a gradient descent. The gradient method iteratively
updates v
k+1
from v
k
as follows
v
k+1
= v
k
+ αs
k
(15)
where s
k
is the so called search direction which is the
negative gradient direction s = −∇E(v
k
). The step α
is computed via a back-tracking algorithm. Starting
with an α = α
0
, the algorithm iteratively computes
E(v
k
+αs
k
) and reduces α until E(v
k
+αs
k
) < E(v
k
).
The computation of α
0
is a critical issue for good
performance of the algorithm. In this paper α
0
is au-
tomatically computed at each iteration k so that the
cage vertices move at most β pixels from its current
position. That is,
α
0
= max
α
{α|kv
k+1
j
− v
k
j
k ≤ β} j = 1 ...N (16)
where β is a user given parameter (usually set to 5 in
the experiments). The backtracking algorithm itera-
tively reduces the value of α until a value of α that
decreases the energy value is found. The gradient de-
scent stops when the backtracking reduces the α be-
low a threshold associated to a cage movement, for
instance 0.05 pixels.
For a given v, the corresponding “deformed” pixel
positions p of Ω
1
and Ω
2
are recovered using (9). The
energy E(v) and gradient ∇E(v) can be then com-
puted. Note that the recovered pixel positions p may
be non-integer positions. Hence, we apply linear in-
terpolation to estimate I(p) and ∇I(p) at such points.
In addition, those pixels that fall outside of the image
support are back projected to the image border (i.e.
pixels at the image border are assumed to extend to
infinity).
To recover the final position of the interface we
parametrize the interface at the beginning (before op-
timization starts) with respect to the cage vertices. Af-
ter convergence, the resulting interface can be easily
recovered by using Equation (9).
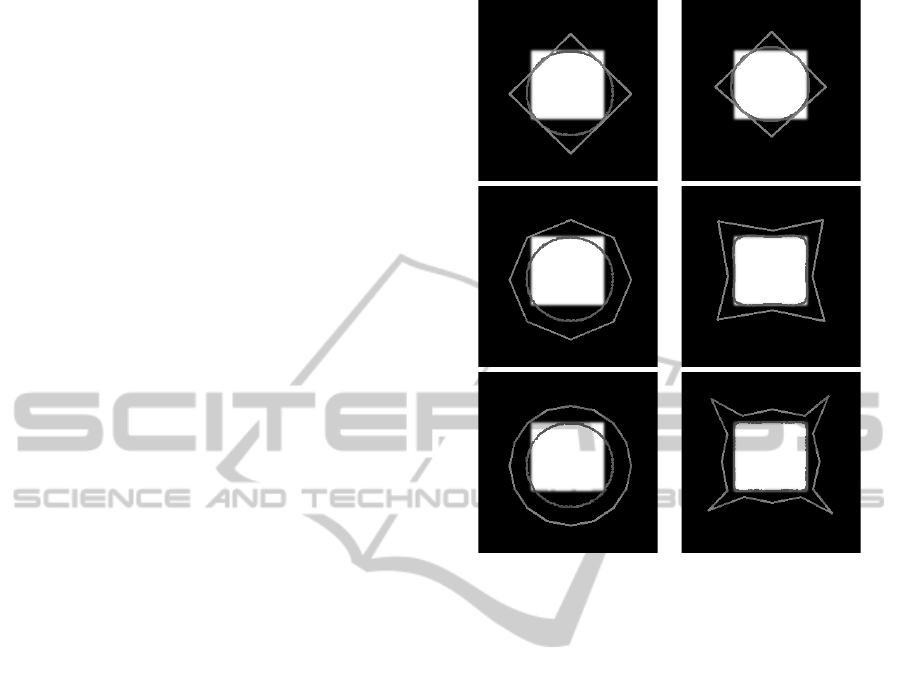
Figure 5: Results for a synthetic image using different num-
ber of cage points. Top, 4 cage points. Middle, 8 cage
points. Bottom, 16 cage points. On the left column the
initial images are shown, while the right correspond to the
results.
5 EXPERIMENTAL RESULTS
In this section we present the experimental results for
two and three dimensional segmentation problems. In
particular, we perform different experiments to show
different characteristics of the proposed segmentation
method: the influence of the number of cage vertex
selection, the importance of the cage shape, and the
performance on some real images.
5.1 Two Dimensional Segmentation
We begin with the two dimensional segmentation, that
is, the image I : R
2
→ R. We consider first some syn-
thetic images, namely a square and a star, to analyze
the behaviour of our approach. For these experiments
Ω
1
is taken to be the whole interior of the evolving
interface and Ω
2
the whole exterior. We would like
to point out that in order to generate these images
the cage and the evolving contour has been painted
rounding the coordinates to nearest integers. Thus,
within the resulting images shown in this section there
may seem to be noisy boundaries.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
10
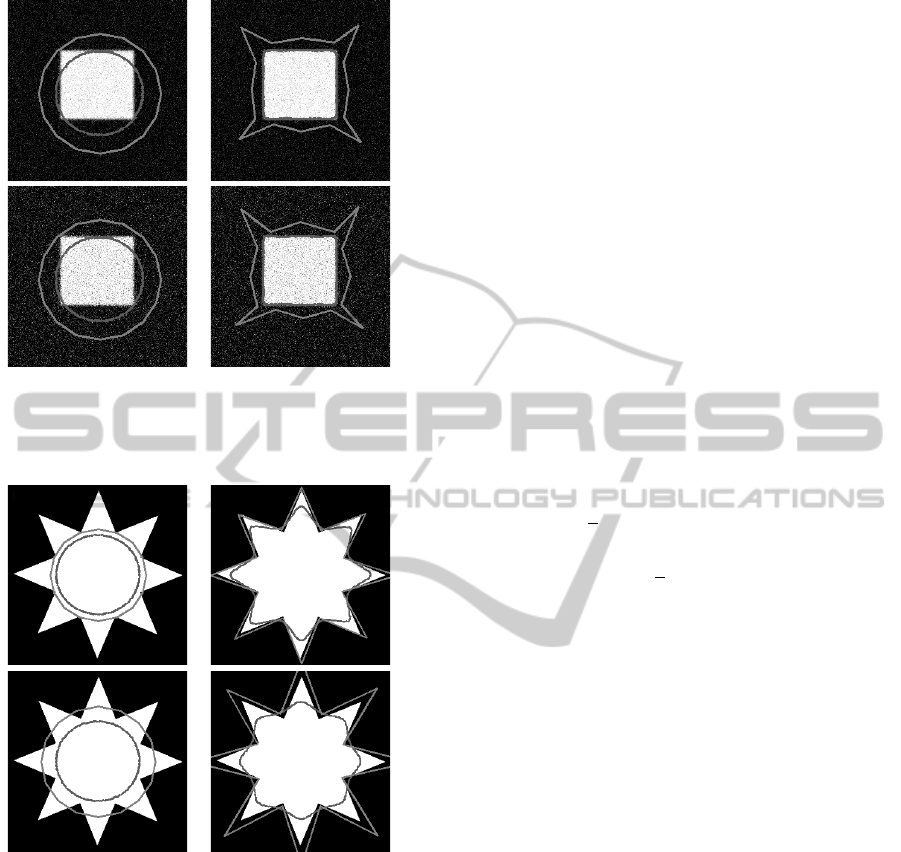
Figure 6: Results for a synthetic image and 16 cage points
using different levels of Gaussian noise. Top, noise variance
is σ
2
= 0.3. Bottom, σ
2
= 0.5, where the image gray-level
is assumed to be normalized to the range [0,1].
Figure 7: Results for a synthetic image with cages at dif-
ferent distances from the evolving contour. Images on the
left are the initial images and on the right are corresponding
results.
Figure 5 is devoted to show the influence of the
number of cage points to the segmentation result. The
initializations are shown on the left column and the
resulting segmentations are shown on the right. The
cages are drawn with light gray whereas the evolving
interface with dark gray. Experiments show how the
interface deforms when using 4, 8 and 16 cage points.
As can be seen, increasing the number of cage points
allows better adaptation to the shape of the object of
interest. The number of cage points influences the
regularization of the evolving contour.
Figure 6 shows the robustness of the method to
simple Gaussian noise. As expected, the model pro-
posed in Equation (10) is robust to Gaussian noise.
Figure 7 shows the effect of the cage distance to
the evolving interface. For both experiments the ini-
tial evolving interfaces are the same, but the cages are
created at a different distance from the evolving in-
terface: the distance on the top is smaller than the
bottom. The images on the left show initializations,
whereas the images on the right show the results. It
can be observed that the distance between the evolv-
ing interface and the cage plays an important role in
the deformations that can be applied to the evolving
interface. In addition, note that the result is inherently
regular (smooth ends instead of sharp ends) due to the
nature of the parametrization. Therefore no regular-
ization terms are needed in the energy function.
We now show results on real images. We have
compared our method with a level-set based Chan and
Vese implementation available in (Getreuer, 2012).
The code implements the following energy
E(C ) = µ Length(C ) +νArea(C )+
λ
1
1
2
ZZ
Ω
1
(I − µ
1
)
2
dx dy+
λ
2
1
2
ZZ
Ω
2
(I − µ
2
)
2
dx dy. (17)
The first term of this energy controls the regularity of
the evolving contour C by penalizing the length. The
second term penalizes the enclosed area of C to con-
trol its side. The third and fourth terms are the terms
we use in our energy and penalize the discrepancy be-
tween the piecewise constant models µ
1
and µ
2
and
the input image.
The previous energy is implemented by means of
a level-set, please see details in (Getreuer, 2012). As
an example, we show in Figure 8 a segmentation re-
sult. The initialization of the level-set is performed
by using a checkerboard shape and is shown in the
middle Figure. The resulting segmentation is shown
in white on the right Figure and has been obtained
with the parameters µ = 0.25, ν = 0.0, λ
1
= 1.0 and
λ
2
= 1.0. As can be seen, level-set based methods
are able to deal with topology changes and thus mul-
tiple connected components may be obtained in the
segmentation. Observe that here two contours have
been obtained as result: the contour around the ele-
phant and the one (small circle) over the head of the
elephant.
The results for the same image and two other real
images are shown in Figure 9. On the left, the initial-
ization is shown: the cage is drawn in black color and
the initial evolving contour in white. In the middle,
the resulting segmentation obtained with our method
is shown. On the right, the segmentation obtained
ActiveContourSegmentationwithAffineCoordinate-basedParametrization
11
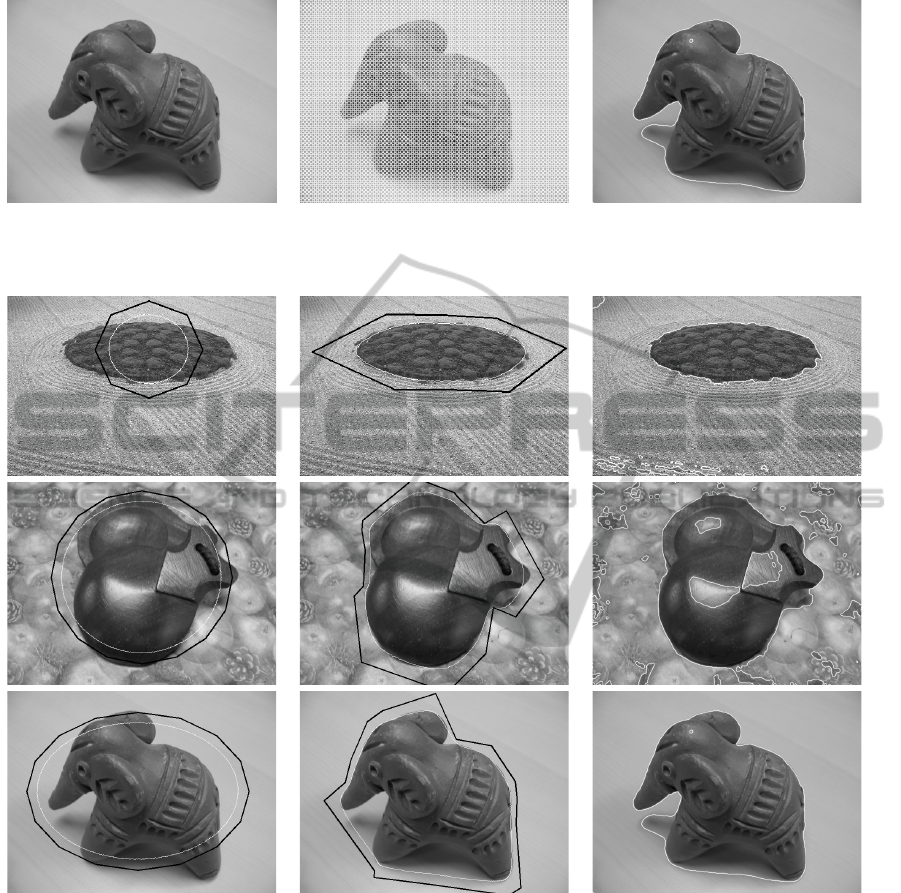
Figure 8: Example of level-set Chan and Vese segmentation. On the left, original image is shown. Initialization, a checker
board shape for the embedded function, is shown in the middle. On the right, resulting segmentation shows contour in white
color.
Figure 9: Results for some real images. On the left column, the initialization is shown: the cage is drawn in black color
whereas the evolving contour in white color. From top to bottom, the number of cage vertices used is 8, 16 and 16. In the
middle, the resulting segmentation obtained with our method is shown: the resulting cage and segmentation are again shown
in black and white, respectively. On the right, the resulting segmentation using a level-set based Chan and Vese segmentation
is shown.
with the Chan and Vese level-set method is shown.
The parameters that have been used for the latter are
µ = 0.25, ν = 0.0, λ
1
= 1.0, λ
2
= 1.0 for the second
and third row, whereas µ = 0.1, ν = 0.0, λ
1
= 1.0,
λ
2
= 1.0 has been used for the first row.
As can be seen, our method is able to obtain a
regular boundary without using any specific energy
term. Regularization is obtained thanks to the used
parametrization. In the level-set method, regulariza-
tion has to be explicitly introduced in the energy term.
On the other hand, the level-set method is able to deal
with topology changes (see the rather high number of
regions obtained in the images on the right column),
whereas our method does not. As commented before,
this limitation is a mild constraint in many applica-
tions, where the goal may be to simply segment one
connected object and thus the topological flexibility
of the level sets is not needed.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
12
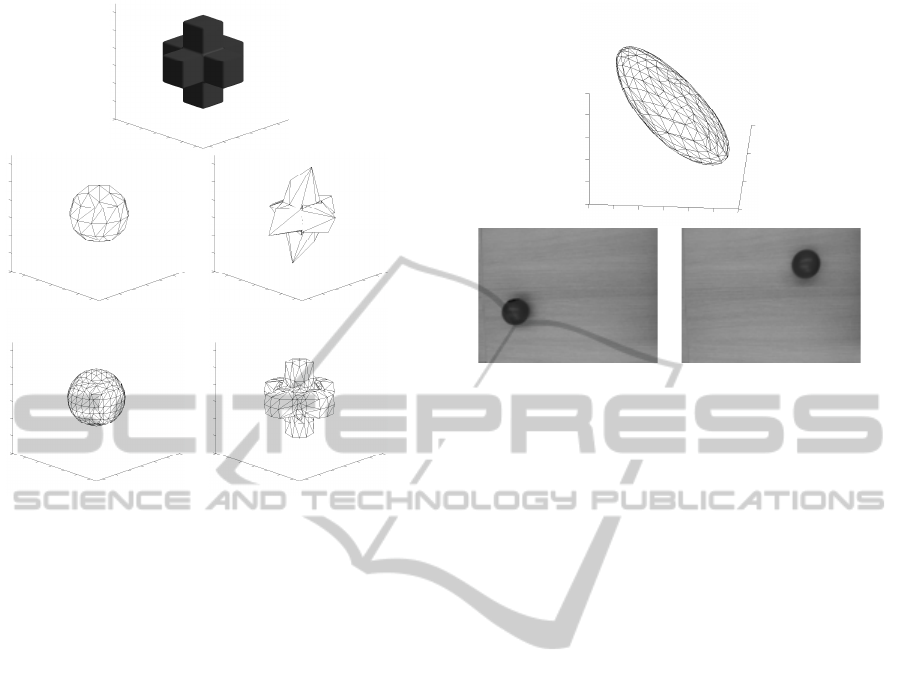
Figure 10: Results for a synthetic 3D image. Top, origi-
nal binary image. Middle left, the initial surface. The cage
has the same number of triangles but has a slightly higher
radius. Middle right, resulting surface after evolution. Bot-
tom, the same experiment is repeated but with a higher num-
ber of triangles for both the initial surface and the cage.
5.2 Three Dimensional Segmentation
We now show some examples for the three dimen-
sional segmentation problem. As commented before,
in this case the cage is a surface made up of triangles.
Figure 10 shows an example for a synthetic im-
age. The original image is shown on the top of the
Figure and represents a binary image with a cross.
The original surface is a ball which constructed using
the marching cube algorithm, is drawn on the middle
left. The cage is created from the previous surface just
by inflating it a bit (0.5 pixels). The surface is then
evolved using the proposed energy and the resulting
segmentation is drawn on the middle right. At the bot-
tom the same experiment is shown but in this case the
cage (as well as the mask) are modelled with a higher
number of vertices. As can be seen, the number of
vertices plays an important role in order to adapt the
evolving surface to the object of interest.
Finally, we show the result with real images, see
Figure 11. We have recorded a video in which a ball
moves along a line. The initial and end position of the
ball is shown on the bottom. The individual images
of the video are then stacked as a 3D image, and an
initial mask is created by defining a 3D ball whose
center is approximately at the middle point joining the
Figure 11: Result for a real 3D image. Bottom, two of the
images of the video. Video images a stacked to form a 3D
image. Top, segmentation result for the moving ball.
initial and end position and whose radius (in 3D) is
the radius of the moving ball. On the top of Figure 11,
it can be seen the result after convergence has reached.
As can be observed, our method is able to properly
extract the “shape” of the 3D object formed by the
moving ball.
5.3 Computation Time
Currently, the code for 2D has been implemented in C
language whereas the 3D only has been implemented
in MATLAB. Regarding the 2D segmentation, the to-
tal amount of time spend by the algorithm is less than
one minute. This includes the computational time of
the mean value coordinates for all pixels of the im-
age and the gradient descent to evolve the contour.
With respect the 3D segmentation, the bottleneck is
currently at the computation of the mean value coor-
dinates for all the voxels of the volume, which may
take a long time. Gradient descent takes then about a
minute to converge.
Our method can be easily parallelized. Indeed,
two issues use most of the computation resources in
our approach, namely the interpolation of the image at
non-integer values (see Equation (9)) and the compu-
tation of the mean value coordinates. These two issue
will receive our focus of attention in future work.
6 CONCLUSIONS
In this paper, we have presented a parametrized ac-
tive contour approach for both two and three dimen-
sional segmentation problem. In our method the in-
ActiveContourSegmentationwithAffineCoordinate-basedParametrization
13

terface is evolved by moving a set of cage points.
In the two dimensional problem the cage is a closed
polygon whereas in the three dimensional problem
the cage is a closed surface (made up of triangles).
Mean value coordinates are used to parametrize the
points of the space, inside or outside the cage. Other
parametrization possibilities exist (such as harmonic
coordinates or Green coordinades), but we have se-
lected mean value coordinates since they are simple
to compute compared to other methods. Note that
the parametrization has an intuitive interpretation. By
moving a cage point, the associated points are moved
correspondingly. This allows to introduce into the
segmentation process the user interactivity: the user
may, for instance, manually move the control points
to the correct position so that the system automati-
cally learns from them.
In addition, within our framework, the regulariza-
tion of the evolving interface can be controlled via the
cage itself: the larger the distance of the cage to the
evolving contour, the higher the contour regulariza-
tion. Thus, there is really no need to include regular-
ization terms within the energy.
Our framework is suitable for the implementa-
tion of discrete energies, both region-based and edge-
based terms, although we have shown here only the
application to a region-based energy, namely the clas-
sical Chan and Vese one.
Morover, we think that our method can be easily
embedded in a shape-constrained approach, that is, an
approach in which the movement of the cage is con-
strained so as to ensure certain shapes for the evolving
contour. Our future work is to apply our method for
3D medical image segmentation problems and paral-
lelize the method to improve its speed.
ACKNOWLEDGEMENTS
Q. Xue would like to acknowledge support from Eras-
mus Mundus BioHealth Computing, L. Igual and L.
Garrido by MICINN projects, reference TIN2012-
38187-C03-01 and MTM2012-30772 respectively.
REFERENCES
Barbosa, D., Dietenbeck, T., Schaerer, J., D’hooge, J., Fri-
boulet, D., and Bernard, O. (2012). B-spline explicit
active surfaces: an efficient framework for real-time
3D region-based segmentation. IEEE Transactions on
Image Processing, 21(1):241–251.
Caselles, V., Kimmel, R., and Sapiro, G. (1997). Geodesic
active contours. International Journal of Computer
Vision, 22:61–79.
Chan, T. and Vese, L. (2001). Active contours without
edges. IEEE Trans. on Imag. Proc., 10(2):266–277.
Coquillart, S. (1990). Extended free-form deformation:
a sculpturing tool for 3d geometric modeling. SIG-
GRAPH, 24(4):187–196.
Faloutsos, P., van de Panne, M., and Terzopoulos, D.
(1997). Dynamic free-form deformations for anima-
tion synthesis. IEEE Transactions on Visualization
and Computer Graphics, 3(3):201–214.
Floater, M. S. (2003). Mean value coordinates. Computer
Aided Geometric Design, 20(1):19–27.
Getreuer, P. (2012). Chan-vese segmentation. Image Pro-
cessing On Line.
Gouraud, H. (1971). Continuous shading of curved sur-
faces. IEEE Transactions on Computers, C-20(6):623
– 629.
Hormann, K. and Floater, M. (2006). Mean value coordi-
nates for arbitrary planar polygons. ACM Transac-
tions on Graphics, 25(4):1424–1441.
Hormann, K. and Greiner, G. (2000). Continuous shading
of curved surfaces. Curves and Surfaces Proceedings
(Saint Malo, France), pages 152 – 163.
Jacob, M., Blu, T., and Unser, M. (2004). Efficient energies
and algorithms for parametric snakes. IEEE Transac-
tions on Image Processing, 13(9):1231–1244.
Joschi, P., Meyer, M., DeRose, T., Green, B., and Sanocki,
T. (2007). Harmonic coordinates for character articu-
lation. In SIGGRAPH.
Ju, T., Schaefer, S., and Warren, J. (2005). Mean value coor-
dinates for closed triangular meshes. In Proceedings
of ACM SIGGRAPH, volume 24, pages 561–566.
Kalmoun, M., Garrido, K., and Caselles, V. (2011). Line
search multilevel optimization as computational meth-
ods for dense optical flow. SIAM Journal of Imaging
Sciences, 4(2):695–722.
Kass, M., Witkin, A., and Terzopoulos, D. (1988). Snakes:
Active contour models. International Journal of Com-
puter Vision.
Lankton, S. and Tannenbaum, A. (2008). Localizing region-
based active contours. IEEE Transactions on Image
Processing, 17(11):2029–2039.
Lipman, Y., Kopf, J., Cohen-Or, D., and Levin, D. (2007).
GPU-assisted positive mean value coordinates for
mesh deformations. In Eurographics Symposium on
Geometry Processing.
Lipman, Y., Levin, D., and Cohen-Or, D. (2008). Green
coordinates. In SIGGRAPH.
Michailovich, O., Rathi, Y., and Tannenbaum, A. (2007).
Image segmentation using active contours driven by
the Bhattacharyya gradient flow. IEEE Transactions
on Image Processing, 16(11):2787–2801.
Rousson, M. and Deriche, R. (2002). A variational frame-
work for active and adaptative segmentation of vec-
tor valued images. In Proceedings of the Workshop
on Motion and Video Computing, pages 56–61. IEEE
Computer Society.
Rueckert, D., Sonoda, L., Hayes, C., Hill, D., Leach,
M., and Hawkes, D. (1999). Nonrigid registration
using free-form deformations: application to breast
MR images. IEEE Transactions on Medical Imaging,
18(8):712–721.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
14
