
Oriented Half Gaussian Kernels and Anisotropic Diffusion
Baptiste Magnier and Philippe Montesinos
Ecole des Mines d’ALES, LGI2P, Parc Scientifique G. Besse, 30035 N
ˆ
ımes Cedex, France
Keywords:
Half Anisotropic Gaussian Kernel, Diffusion PDEs.
Abstract:
Nonlinear PDEs (partial differential equations) offer a convenient formal framework for image regularization
and are at the origin of several efficient algorithms. In this paper, we present a new approach which is based
(i) on a set of half Gaussian kernel filters, and (ii) a nonlinear anisotropic PDE diffusion. On one hand, half
Gaussian kernels provide oriented filters whose flexibility enables to detect edges with great accuracy. On the
other hand, a nonlinear anisotropic diffusion scheme offers a means to smooth images while preserving fine
structures or details, e.g. lines, corners and junctions. Based on the calculus of the gradient magnitude and
two diffusion directions, we construct a diffusion control function able to achieve precise image regulariza-
tion. Some quantified experimental results compared to existing PDEs approaches and a discussion about the
parameterizing of the method are presented.
1 A FRAMEWORK OF
ANISOTROPIC DIFFUSION
WITH PDE
Obtain regularized versions of noisy, corrupted or de-
graded images caused for example by compression ar-
tifacts is a difficult task in image processing. How-
ever, preserving significant internal structures is a
field that has largely benefited from techniques of Par-
tial Differential Equations (PDE) (Aubert and Korn-
probst, 2006; Magnier and Montesinos, 2013). PDEs
belong to one of the most important part of mathe-
matical analysis and are closely related to the physi-
cal world. In this context, images are considered as
evolving functions of time and a regularized image
can be seen as a version of the original image at a
special stage. Thereby, PDEs methods smooth locally
the image following one or several directions which
are different in each point of the image. In this paper,
let us note I : Ω → R, (Ω ⊂ R
2
) a grey level image
with I(x,y) corresponding to the pixel intensity of co-
ordinates (x, y). Considering I
0
the original image,
the general evolution model can be formally written
in the following form:
∂I
∂t
(x,y,t) = F (I(x,y,t))
I(x, y,0) = I
0
(x,y)
(1)
where F is a given image processing algorithm, pre-
serving edges having high gradient. F represents a
function of the original image I
0
and its first and
second order spatial derivatives (Caselles and Morel,
1998).
It should be noted that Koenderink (Koenderink,
1984) was the first to underline the equivalence be-
tween the convolution with a Gaussian kernel of stan-
dard deviation
√
2t and the solution of the PDE de-
scribing the heat diffusion, at a time t. This smooth-
ing process, called isotropic diffusion, is known to
smooth noise but blur edges, leading to loose image
structures. In order to regularize images by control-
ling the diffusion, Perona and Malik (Perona and Ma-
lik, 1990) have proposed a model described by the
following equation:
∂I
∂t
(x,y,t) = div(g(k∇Ik) ·k∇Ik) (2)
where div represents the divergence operator and
g(s) : [0,+∞[→]0,+∞[ a decreasing function satisfy-
ing g(0) = 1 and g(+∞) = 0, this function could be
chosen as g (k∇Ik) = e
−
k∇Ik
K
2
, with K ∈ R a con-
stant that can be assimilated to a gradient threshold or
a diffusion barrier.
The decomposition of the eq. 2 with the second
derivatives of I in orthogonal directions (ξ ⊥ η) re-
spectively in the edge direction called ξ and in the
gradient direction labelled η =
∇I
k∇Ik
enables to under-
stand the diffusion behavior (Kornprobst et al., 1997):
∂I
∂t
(x,y,t) = c
ξ
·I
ξξ
+ c
η
·I
ηη
(3)
73
Magnier B. and Montesinos P..
Oriented Half Gaussian Kernels and Anisotropic Diffusion.
DOI: 10.5220/0004679500730081
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 73-81
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

where (I
ξξ
,I
ηη
) =
∂
2
I
∂ξ
2
,
∂
2
I
∂η
2
, c
ξ
and c
η
are coeffi-
cients tuning the diffusion (diagrammed in Fig. 1(a)).
When c
ξξ
= c
ηη
= 1, the eq. 3 is equivalent to the
heat equation (Koenderink, 1984). Choosing c
ξ
=
g(k∇Ik), a gradient function and c
η
= g (k∇Ik) +
k∇Ik·g
0
(k∇Ik), the diffusion process described in eq.
3 can be interpreted as two directional heat flows
1
with different diffusion intensities in the η and ξ di-
rections to preserve discontinuities:
• Inside homogeneous regions, the gradient mag-
nitude k∇Ik is small and the diffusion becomes
isotropic.
• On edges, the diffusion becomes anisotropic, be-
ing attenuated by the function g, and is inhibited
when the two coefficients (c
ξξ
,c
ηη
) tend to zero.
Diffusion control is done with finite differences so
that many contours of details are preserved. However,
within images corrupted by a heavy noise, generally,
this noise is not totally removed because the diffusion
process is inhibited.
Gaussian filtering for gradient estimation has been
used in a number of works to elaborate the model pre-
sented in eq. 3 less sensitive to noise and more sta-
ble. We can mention here the approach of Alvarez
et al. (Alvarez et al., 1992) which induces for each
pixel either an adaptive unidirectional tangential dif-
fusion I
ξξ
at level of edges or an efficient isotropic
smoothing for noise removal inside homogeneous re-
gions. Nevertheless, this smoothing model does not
allow a progressive diffusion in the gradient direc-
tion η because it depends on two diffusion barriers.
Consequently, in the presence of a high noise, even in
homogeneous regions, this diffusion scheme behaves
like the Mean Curvature Motion (Catt
´
e et al., 1992)
(MCM) method which consists in performing the dif-
fusion only along the tangential direction ξ or along
isophote lines. Although the MCM scheme regular-
izes the image in edge directions, this approach tends
to round corners after a certain number of iterations
and can create stripes inside noisy homogeneous re-
gions.
Instead of considering only the gradient mag-
nitude to drive the diffusion, tensorial approaches
(Weickert, 1999; Tschumperl
´
e and Deriche, 2005;
Tschumperl
´
e, 2006) contribute to another image dif-
fusion formalism. From a structure tensor J
ρ
=
G
ρ
∗ ∇I
σ
∇I
T
σ
, where G
ρ
denotes a Gaussian ker-
nel of standard deviation ρ, authors of (Weickert,
1999; Tschumperl
´
e and Deriche, 2005; Tschumperl
´
e,
1
Note that if k∇Ik>
K
√
2
, then c
η
<0 and the diffusion
equation behaves locally like an inverse diffusion equation
which is an unstable process enhancing features.
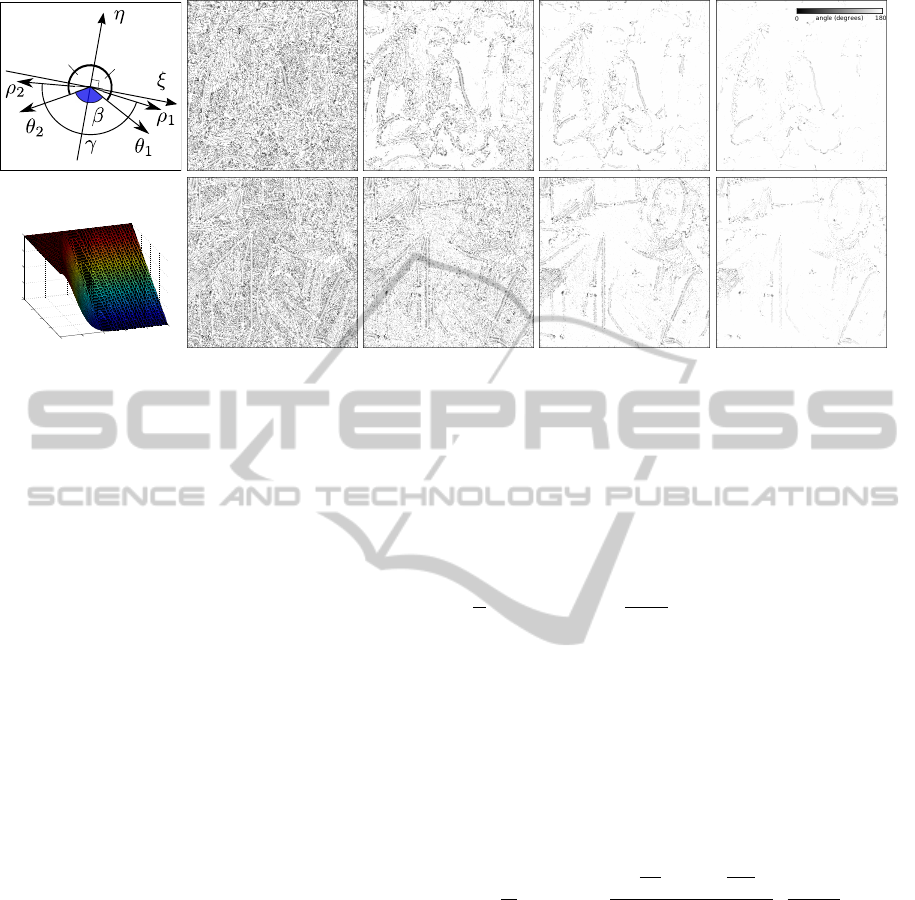
Object
(a) (b)
Figure 1: Diagrams of edge diffusion. (a) An image contour
and its moving vector basis (ξ,η) and diffusion representa-
tion with ellipsoids. The more the gradient is high, the more
the ellipse is elongated. Gradient and tangential direction
denoted (η,ξ) and diffusion representation with ellipsoids,
note that ellipsoids are not always oriented in the ξ direction
using tensorial methods. (b) Our desired diffusion represen-
tation with half ellipsoids, the more the edge is sharped and
the angle is acute, the more the half ellipses are thin.
2006) elaborate a tensor field which specifies the
local smoothing geometry defined from the spec-
tral elements of the structure tensor. Then, us-
ing the divergence (Weickert, 1999) or the trace
(Tschumperl
´
e and Deriche, 2005), the smoothing
along a contour in inversely proportional to the con-
tour strength in the direction of the eigenvector asso-
ciated to the higher eigenvalue. Inside homogeneous
regions, eigenvalues are close to zero and the diffu-
sion becomes isotropic.
As demonstrated in (Tschumperl
´
e and Deriche,
2005), trace based PDE is best suited to understand
the local smoothing geometry behavior and these dif-
fusion scheme ensure coherence smoothing direc-
tions but the Gaussian behavior on curved struc-
tures or corners results in a ”mean curvature flow
effect” leading to round small structures or corners.
In order to compensate this drawback, the author of
(Tschumperl
´
e, 2006) proposed a curvature-preserving
smoothing PDE that diffuses the image I along a field
of vectors w issued by the eigenvectors of J
ρ
. Despite
the fact that the author of this method (Tschumperl
´
e,
2006) has demonstrated that it better preserves cor-
ners and small details in the image, as the other ten-
sorial approaches, when the anisotropic coefficient is
too large, the diffusion of a high noise brings a fiber
effect in homogeneous regions. To avoid this unde-
sired diffusion effect, it is preferable to use a higher
standard deviation of the Gaussian σ, however this
leads to delocate even so the corners, diffuse small
objects and also blur edges.
In this paper, we propose a new PDE scheme
that regularizes images considering two contour di-
rections. This diffusion process correctly preserves
corners as well as small objects and becomes isotropic
inside homogeneous regions without generating un-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
74

desired fiber effect of artifacts. Thanks to a rotat-
ing Gaussian derivative half-filter, we extract a gra-
dient amplitude and determine two edge directions.
As illustrated in Fig. 1(b), if the gradient magni-
tude is small, the two major smoothing directions are
straightened for an opposite alignment (i.e. 180
◦
), be-
coming thereby either tangential to the edge or creat-
ing an isotropic diffusion inside flat regions. Then we
apply an anisotropic diffusion on each pixel using new
control functions adapted to our objectives of image
regularization.
2 ORIENTED HALF GAUSSIAN
KERNELS
Steerable filters (Freeman and Adelson, 1991; Ja-
cob and Unser, 2004) or anisotropic edge detectors
(Perona, 1992) perform well in detecting large linear
structures (see kernels in Fig. 2 (a) and (b)). Close
to corners however, the gradient magnitude decreases
as the edge information under the scope of the filter
decreases. Consequently, the robustness to noise con-
cerning small objects becomes very weak.
A simple solution to bypass these effects would be
to consider paths crossing each pixel in several direc-
tions. Wedge steerable filters introduced by Simon-
celli and Farid (Simoncelli and Farid, 1996) are com-
posed of asymmetric masks providing orientation of
edges in different directions issued from a pixel. Akin
to oriented histograms, the saliency of the gradient
measure is calculated at each of discretized orienta-
tions (a wedge filter is presented in in Fig. 2 (d)).
An advantage of these oriented filters is that they al-
low a characterization of junctions (M
¨
uhlich et al.,
2012). In (Michelet et al., 2007) is presented also
an asymmetric operator based on a sliding rectangular
window where the orientation is defined as being the
angle that corresponds to the maximum homogene-
ity i.e. the minimum variance. Unlike the Gaussian
function, which is an optimal solution for the Canny
criteria (Canny, 1986), in the direction of the edges,
these oriented filters have a constant amplitude on al-
most the whole extent of the mask.
(a) Isotropic (b) Anisotropic (c) Half anisotropic (d) Wedge
gaussian kernel gaussian kernel gaussian kernel steerable filter
Figure 2: Different 2D derivative Gaussian kernels and a
wedge filter.
+
+
+
+
+
+
_
_
_
_
_
_
(a) Rotated (b) Half anisotropic Gaussian kernel
derivation filter and edge directions
Figure 3: A thin rotating Gaussian derivative half-filter.
The idea developed in (Montesinos and Magnier,
2010) was to “cut” the derivative (and smoothing)
Gaussian kernel in two parts: a first part along an ini-
tial direction, and a second part along a second direc-
tion (Figs. 2(c) and 3). At each pixel of coordinates
(x,y), a derivation filter is applied to obtain a deriva-
tive information called Q (x, y,θ):
Q (x, y,θ) = I
θ
∗C
1
·H (−y) ·x ·e
−
x
2
2λ
2
+
y
2
2µ
2
(4)
where I
θ
corresponds to a rotated image
2
of orien-
tation θ, C
1
is a normalization coefficient, (x,y) are
pixel coordinates, and (µ, λ) the standard deviations
of the anisotropic Gaussian filter. Since we only re-
quire the causal part of this filter along Y axis, we
simply “cut” the smoothing kernel by the middle, in
an operation that corresponds to the Heaviside func-
tion H. Q (x,y, θ) represents the slope of a line derived
from a pixel in the perpendicular direction to θ.
To obtain gradient magnitude measure k∇Ik and
its associated direction η on each pixel P, we first
compute the global extrema of the function Q (x, y,θ),
with θ
1
and θ
2
. θ
1
and θ
2
define a curve crossing the
pixel (an incoming and outgoing direction). Two of
these global extrema are combined to obtain k∇Ik:
k∇Ik = max
θ∈[0,360[
Q (x, y,θ) − min
θ∈[0,360[
Q (x, y,θ)
θ
1
= argmax
θ∈[0,360[
(Q (x, y,θ))
θ
2
= argmin
θ∈[0,360[
(Q (x, y,θ))
(5)
Once k∇Ik, θ
1
and θ
2
have been obtained, the edges
can be easily extracted by computing local maxima
of k∇Ik in the direction of the angle η = (θ
1
+ θ
2
)/2
2
As explained in (Montesinos and Magnier, 2010), the
image is oriented instead of the filter (like the oriented filter
presented in (Michelet et al., 2007)) so as to decrease algo-
rithmic complexity and to allow use of a recursive Gaussian
filter (Deriche, 1992). As a matter of fact, for implemen-
tation purpose we replace the filtering of the initial image
I
0
by a filter oriented along the varying direction θ with the
filtering of an image I
θ
, rotated by an angle −θ, by the con-
stant filter of orientation 0. This last operation is described
by eq. (1) and is completely equivalent to a rotated filtering.
OrientedHalfGaussianKernelsandAnisotropicDiffusion
75
0
0.2
0.4
0.6
0.8
1
π/4
π/2
3π/4
π
0
π/4
π/2
3π/4
π
||∇ I ||
β
γ
(a) Straightening β (b) β angle (c) γ angle, a=0.1 (d) γ angle, a=0.2 (e) γ angle, a=0.3
Figure 4: Different angles representation, the straightening up function and γ angle representation for corrupted images in
Figs. 8(b) and 9(b) in function of different values of a. The more the image must be regularized, the more the a parameter
must be large (e.g. a = 0.2 for a heavy noise, see bottom). The more the pixel value is dark, the more the ange is acute.
followed by an hysteresis threshold (see (Montesinos
and Magnier, 2010) for further details). In this paper,
we are solely interested in the gradient magnitude and
the two directions (θ
1
,θ
2
) which are improved (see
next section) to be used in our diffusion scheme dis-
cussed in Section 3.2.
Due to their adjustable lengths, rotating filters en-
able computing two precise diffusion orientations in
the edge directions, even at high noise levels. More
details about the effect of noise can be found in (Mag-
nier et al., 2011a) where the authors have evaluated
this edge detector as a function of noise level, and,
a comparison with other approaches (Perona, 1992)
shows the efficiency of this method. Note that these
kernels have been used in several diffusion schemes
in image regularization (Magnier et al., 2011b; Mag-
nier et al., 2012; Magnier et al., 2013a; Magnier et al.,
2013b; Magnier and Montesinos, 2013).
3 SMOOTHING IN TWO EDGE
DIRECTIONS
3.1 Two Improved Edge Directions in a
Diffusion Sceme
As detailed in Section 1, PDE-based image regular-
ization techniques using gradient intensities or tenso-
rial diffusion smooth the image either in the orthog-
onal directions (ξ, η), or in the directions provided
by the eigenvectors of the structure tensor. However,
both approaches do not take into account the two ac-
tual directions of edges, for example at a corner level.
For removing texture and preserving edges, is-
sued by an edge classifier, the original idea devel-
oped in (Magnier et al., 2011b) was to smooth the
image in the two contour directions called (ξ
1
,ξ
2
):
∂I
∂t
(x,y,t) = I
ξ
1
ξ
2
=
∂
2
I
∂ξ
1
∂ξ
2
. As textures are annihilated,
this approach is not adapted for image regularization,
especially because the diffusion is not controlled.
In (Magnier et al., 2013b), a pixel classification
determines roughly if a pixel belongs to a homoge-
nous region or an edge, then, authors have devel-
oped a new diffusion method. Inside edge regions,
a function of the gradient magnitude issued by half
Gaussian kernels (eq. 5) and also of the angle be-
tween the two diffusion directions (θ
1
,θ
2
) called β =
abs(θ
1
−θ
2
) (Fig. 4(a)) drives the diffusion process:
∂I
∂t
(x,y,t) =
e
−
k∇Ik
K
1
2
+ e
−
(π−β)
(π·K
2
)
2
2
·
∂
2
I
∂θ
1
∂θ
2
, (6)
with K
i,i∈{1,2}
∈]0;1]. This diffusion process com-
bines isotropic and anisotropic diffusion, while pre-
serving the edges and corners of different objects
in highly noisy images. Nevertheless, instead of
enhance textures, authors use of the heat equation,
smoothing them isotropically. Moreover, as the
anisotropic diffusion process is applied only at po-
sition of edges, it creates undesired lineaments near
edges caused by the directional diffusion (θ
1
,θ
2
).
The anisotropic edge detector based on half ker-
nels informs (eq. 5) both on the importance of the
contours (gradient value) and its directions (θ
1
,θ
2
).
Our regularization method uses these two orientations
in the smoothing process in function of the angle β
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
76

(a) Lena original (b) Our method (c) Enlargement of (a) (d) Enlargement of (b)
Figure 6: Our algorithm applied on a real image polluted by an acquisition noise.
0.2
0.4
0.6
0.8
1
k = 0.1
k = 0.2
k = 0.5
k = 0.9
0
0
0.2
0.4
0.6
0.8
1
0
π/2
π
3π/2
2π
0
0.2
0.4
0.6
0.8
1
||∇ I ||
γ
(a) Function e
−
(π−γ)
(π·k)
2
(b) f
k
function, k = 0.6
Figure 5: Control functions of the diffusion process.
between θ
1
and θ
2
. However, inside homogeneous
regions, due to the level lines on the image surface,
θ
1
and θ
2
are not opposite directions (i.e. β 6= π,
see Fig. 6(c)), thus the diffusion does not perform
isotropically. Here, we propose to align the orienta-
tions diffusion when the gradient value is low (i.e.
θ
1
= θ
2
+ π). To achieve this, a new angle called γ
between the two edges directions is defined as:
γ = min(β + π ·e
−
k∇Ik
a
2
−π ·e
−
1
a
2
,π) (7)
The more k∇Ik is close to zero, the more γ is close
to π (plotted in Fig. 4(a) bottom). The parameter a ∈
]0,1] steers the straightening, as shown in Fig. 4, the
more a is growing, the more γ is close to π for each
pixel. Now, as illustrated in Fig. 4(a), we consider the
two new diffusion directions ρ
1
and ρ
2
in our method
(see Section 3.2), estimated modulo 2π in function of
the following table:
θ
1
> θ
2
θ
1
< θ
2
ρ
1
= θ
1
+
γ−β
2
ρ
1
= θ
1
−
γ−β
2
ρ
2
= θ
2
−
γ−β
2
ρ
2
= θ
2
+
γ−β
2
3.2 An Approach Preserving Contours
and Smoothing Regions
Our algorithm enables a smoothing in the improved
directions of the contours, thus preserving edges and
details (I
ρ
1
ρ
2
term) while diffusing also in the di-
rection of η for edges having a low gradient or in-
side homogeneous regions (I
ηη
term). Furthermore,
these three directions smoothing terms have to be con-
trolled in order to preserve image contours and not to
create undesired artifacts or fiber effect elsewhere. In
this respect, we adapt a new PDE developed in (Mag-
nier and Montesinos, 2013), involving the gradient
magnitude (eq. 5) and the γ angle (eq. 7) driving both
the diffusion terms I
ρ
1
ρ
2
and I
ηη
:
∂I
∂t
(x,y,t) = f
k
·
I
ρ
1
ρ
2
+ f
h
·I
ηη
f
k
=
e
−
k∇Ik
k
2
+ e
−
(π−γ)
(π·k)
2
2
f
h
= e
−
k∇Ik
h
2
, with (k, h) ∈]0; 1]
2
(8)
The f
k
function ensures the diffusion preserving
edges and corners whereas the f
h
function enables
a permanent smoothing in the gradient direction for
noisy homogeneous regions. One one hand, the more
the h value is close to 1, the more edges are blurred,
one the other hand the more the k value is close to 1,
the more the diffusion process is important. Contrary
to (Alvarez et al., 1992), these control functions are
not threshold functions but continuous functions (Fig.
5). Thus, the diffusion is never only in the (ρ
1
,ρ
2
)
directions. In case of a small gradient and a γ angle
close to π, the considered pixel will be widely dif-
fused (see Fig. 5(a)). If the gradient absolute value is
large and the γ angle is small, smoothing is weak and
operates mainly along these two orientations (ρ
1
,ρ
2
).
4 EXPERIMENTAL RESULTS
AND ANALYSIS
In this section, we present several results of our reg-
ularization method compared to different other PDEs
OrientedHalfGaussianKernelsandAnisotropicDiffusion
77
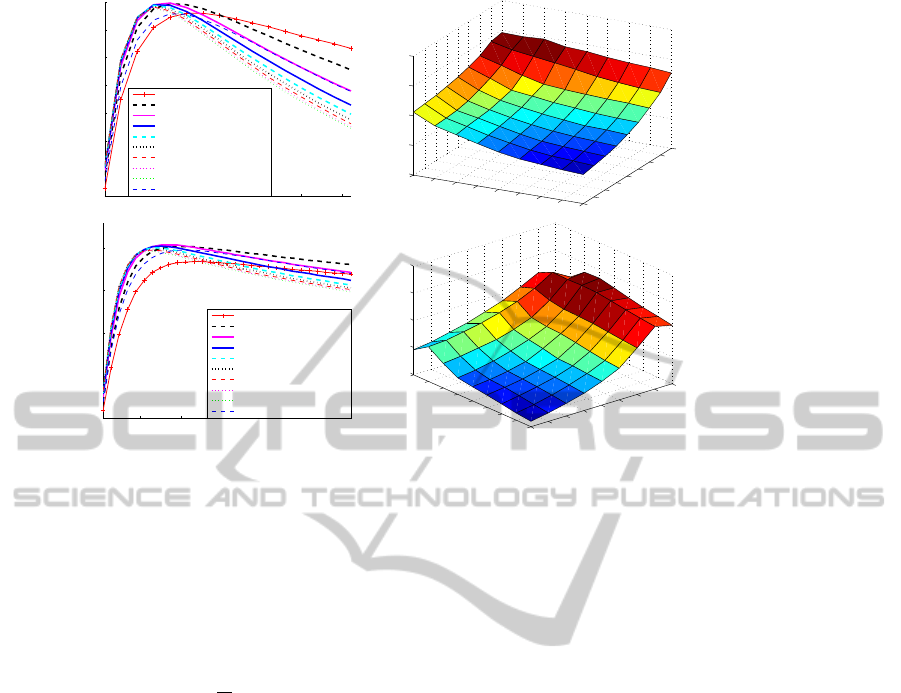
5 10 15 20 25 30
0.72
0.74
0.76
0.78
0.8
0.82
0.84
0.86
Iterations
SSIM
k = 0.1, h = 0.1 and a = 0.1
k = 0.2, h = 0.1 and a = 0.1
k = 0.3, h = 0.1 and a = 0.1
k = 0.4, h = 0.1 and a = 0.1
k = 0.5, h = 0.1 and a = 0.1
k = 0.6, h = 0.1 and a = 0.1
k = 0.7, h = 0.1 and a = 0.1
k = 0.8, h = 0.1 and a = 0.1
k = 0.9, h = 0.1 and a = 0.1
Edges directions, k = 0.3, h = 0.1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.83
0.84
0.85
0.86
0.87
h
k
SSIM
(a) Man image
10 20 30 40 50 60
0.5
0.55
0.6
0.65
0.7
Iterations
SSIM
k = 0.1, h = 0.1 and a = 0.2
k = 0.2, h = 0.1 and a = 0.2
k = 0.3, h = 0.1 and a = 0.2
k = 0.4, h = 0.1 and a = 0.2
k = 0.5, h = 0.1 and a = 0.2
k = 0.6, h = 0.1 and a = 0.2
k = 0.7, h = 0.1 and a = 0.2
k = 0.8, h = 0.1 and a = 0.2
k = 0.9, h = 0.1 and a = 0.2
Edges directions, k = 0.3, h = 0.1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.68
0.69
0.7
0.71
0.72
h
k
SSIM
(b) Barbara image
Figure 7: SSIM evolution in function of the (k,h) parameters. On the right: highest score.
approaches. For each result, presented below, we de-
tail the parameters used either for our algorithm, or
for other methods. Also, we show a SSIM (Wang
et al., 2004) evaluation of noisy images as a function
of the number of iterations using different parameters,
which permits us to discuss about the choice of the
best parameters couple (k,h). Note that, in order to
obtain precise diffusion directions (θ
1
,θ
2
), we use a
discretization angle of ∆θ =
π
90
= 2
◦
and the standard
deviation of the half anisotropic Gaussian are µ = 5,
λ = 1 for the gradient extraction (eq. 5).
Firstly, the image in Fig. 6(a) is corrupted by
a low acquisition noise because it is a scan of the
original Lena from Playboy. After 10 iterations, our
method removes this noise, and plain regions become
totally homogeneous whereas small objects are well
preserved (see details in Fig. 6(b)). Diffusion parame-
ters are (k,h)=(0.3,0.1) and a = 0.1 because the noise
is low in this image.
The second image shown in Fig. 8(b) is a nat-
ural image contaminated by a Gaussian noise (σ =
10). We aim to regularize this picture and preserve
edges as far as possible. As presented in Fig. 8(g),
(h) and (i), comparing the absolute error between
the original image and the regularized image, our
algorithm preserves better edges than tensorial re-
sults (Tschumperl
´
e and Deriche, 2005; Tschumperl
´
e,
2006). To obtain a better visualization, note that the
absolute error images are corrected following a curve
on the image histogram, as presented in Fig. 8(c).
This visualization process is the same for each abso-
lute error image presented in this paper.
The third noisy image presented in Fig. 9(b)
contains a random Gaussian noise of standard devi-
ation σ = 20. Due to this high noise and the tex-
ture, this image is particularly difficult to regularize
correctly while preserving the thin texture. For each
filter, we choose the parameters that gives the best
results. In order to obtain comparative results, we
choose the same width (i.e. standard deviation) of
the Gaussian kernel for approaches using this function
(i. e. σ = µ = 1 for (Alvarez et al., 1992; Weickert,
1999; Tschumperl
´
e and Deriche, 2005; Tschumperl
´
e,
2006)). We compare our result with the MCM (Catt
´
e
et al., 1992), the methods of Perona-Malik (Perona
and Malik, 1990), Alvarez et al. (Alvarez et al.,
1992), tensorial driven diffusion (Weickert, 1999;
Tschumperl
´
e and Deriche, 2005; Tschumperl
´
e, 2006)
and Magnier et al. (Magnier et al., 2013b).
It is easy to remark that MCM and Perona-Malik
models do not remove correctly the noise. Algorithm
of Alvarez et al. loses the texture and creates arti-
facts at position of edges. Tensors (Weickert, 1999;
Tschumperl
´
e, 2006) diffusion creates a fiber effect in
homogeneous regions due to the high noise. Tenso-
rial result of Tschumperl
´
e (Tschumperl
´
e and Deriche,
2005) gives a good result even if this method is known
to distort corners but creates a graininess effect inside
homogeneous regions (see details in Fig. 9(l)). Our
algorithm restores correctly edges (Fig. 9(i)), does not
create undesirable fiber effect inside homogeneous re-
gions and enables a regularization of stripes textures
with the use of thin half kernels (details in Fig. 9(m)).
We have tested different values of the couple (k,h)
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
78
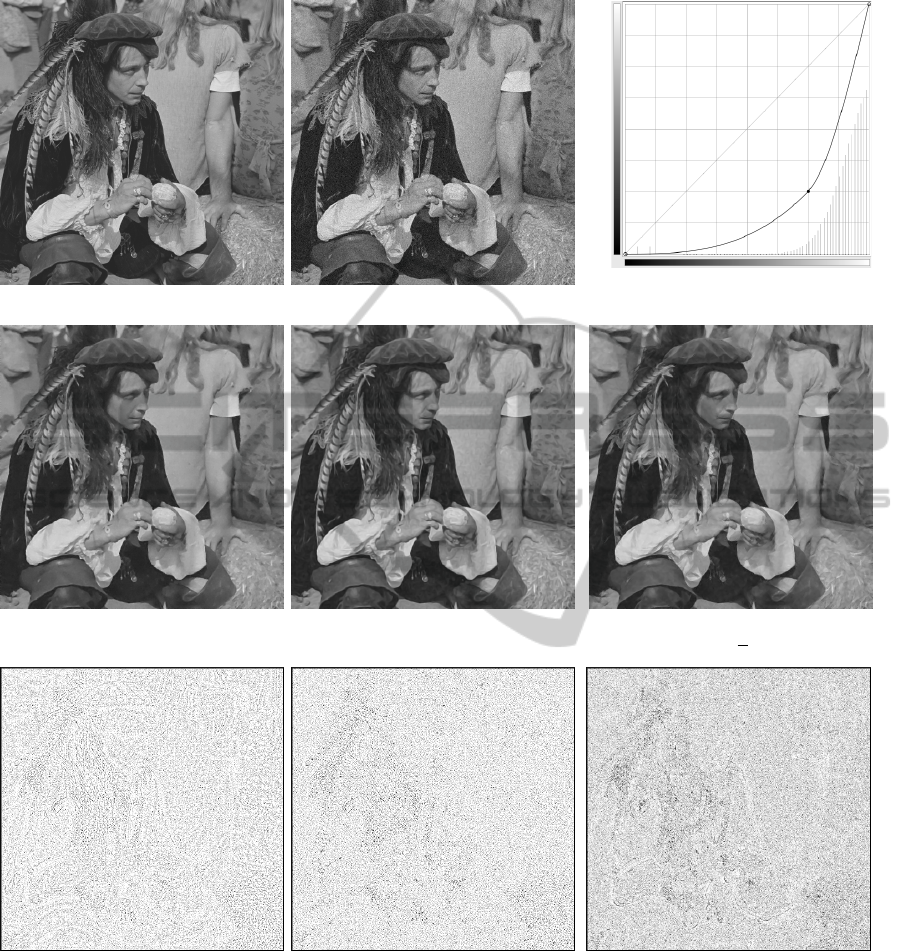
Original error image
Corrected error image
(a) Image of the Man, 512×512 (b) Noisy image, σ = 10 (c) Correction curve of the error
(d) Tensorial result (Tschumperl
´
e and Deriche, 2005) (e) Tensorial result (Tschumperl
´
e, 2006) (f) Our result
σ = 1, ρ = 0.7, 20 iterations σ = 1, ρ = 0.7, 20 iterations µ=5, λ=1, ∆θ=
π
90
, 12 iterations
(g) Absolute error of (d) (h) Absolute error of (e) (i) Absolute error of (f)
Figure 8: Image regularization and absolute error. Absolute error are negative images.
and when k < h, the diffusion results in blurring
edges. When k 6 0.2, flat regions become totally ho-
mogeneous but the smoothing process is so weak on
edges that they are not retored. Fig. 7 enables a bet-
ter visualization for the choices of the couple (k,h) in
function of the SSIM evolution. It determines that for
(k, h) = (0.3, 0.1), the results are the best with this set
of parameters, only the a parameter (Fig. 4) and the
standard deviations of the half kernels must be set in
function of the image type. Generally, the choice of
our half kernel filters parameters (µ,λ) has to be done
in function of the noise level. In order to preserve
small objects, we can choose for the length of our fil-
ter µ = 5. However, the width which corresponds to
the derivation filter depends on the noise level and the
image size. typically, we can choose λ = 1, it enables
to keep precisely edges but if the noise is higher, we
can choose a larger value.
OrientedHalfGaussianKernelsandAnisotropicDiffusion
79
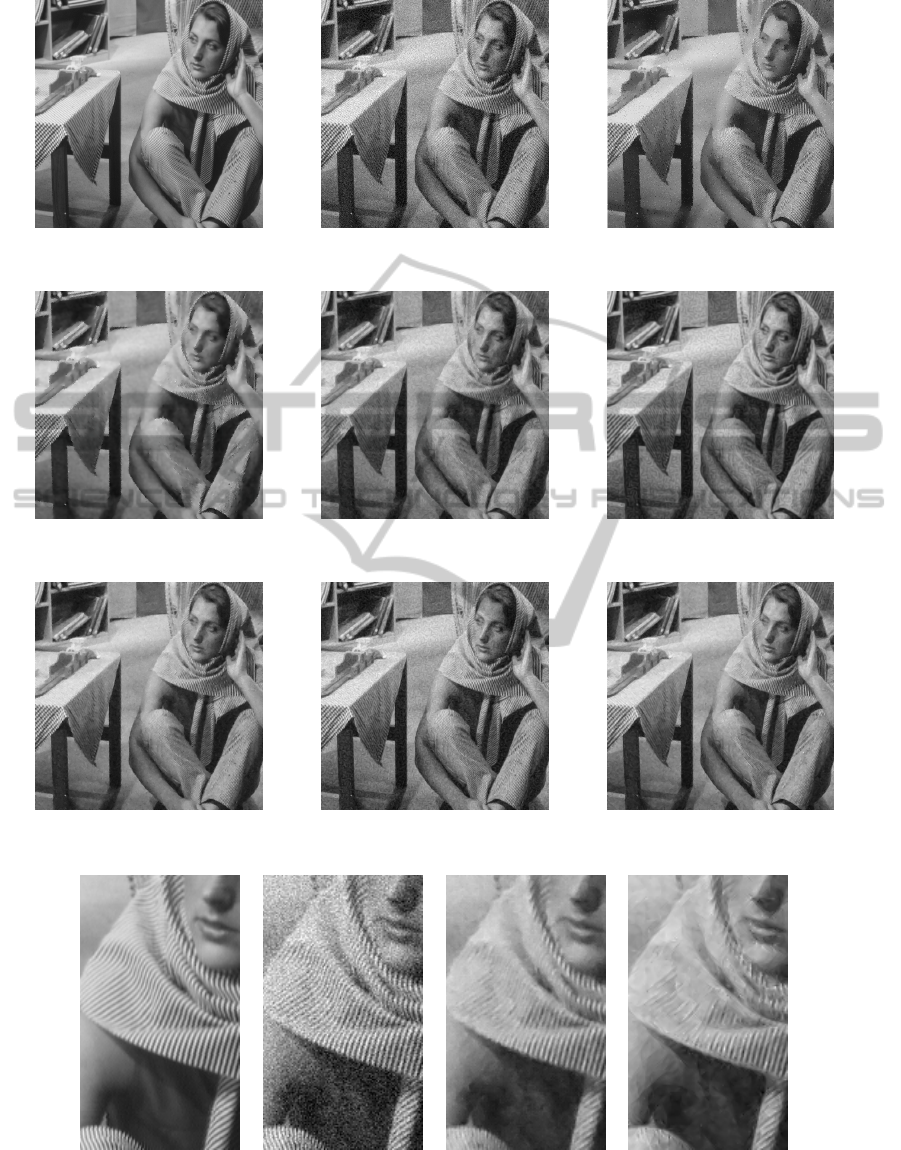
(a) Image of Barbara (b) Degraded image with a (c) Perona-Malik diffusion (Perona and Malik, 1990)
512×512 Gaussian noise: σ = 20 K = 0.05, 100 iterations
(d) Alvarez et al. diffusion (Alvarez et al., 1992) (e) MCM diffusion (Catt
´
e et al., 1992) (f) Weickert’s result (Weickert, 1999)
σ = 1, 20 iterations, K = 0.02 20 iterations σ = 1, ρ = 0.7, 50 iterations
(g) Tensorial result (Tschumperl
´
e and Deriche, 2005) (h) Tensorial result (Tschumperl
´
e, 2006) (i) Our result, k=0.3, h=0.1,
σ = 1, ρ = 0.7, 20 iterations σ = 1, ρ = 0.7, 20 iterations µ=5, λ=1, 20 iterations
(j) Close up in (a) (k) Close up in (b) (l) Close up in (g) (m) Close up in (i)
Figure 9: Enhancement of Barbara image by different PDE methods.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
80

5 CONCLUSIONS
In this paper, we have presented a new regulariza-
tion technique based on half Gaussian filtering fol-
lowed by an anisotropic PDE diffusion. This method
complements previous works by calculating new di-
rections of diffusion for a more accurate regulariza-
tion of images. We have shown that the fine assess-
ment of the diffusion direction is a key factor, and
we have proposed a set of control parameters which
provide very good results in restoration of noisy im-
ages. Eventually, as these diffusion directions pre-
serve precisely corners and small objects in images,
future works will focus on the extraction of corners
only using the improved edges directions formula de-
tailed in this paper.
REFERENCES
Alvarez, L., Lions, P.-L., and Morel, J.-M. (1992). Image
selective smoothing and edge detection by nonlinear
diffusion, ii. SIAM J. of Num. Anal., 29(3):845–866.
Aubert, G. and Kornprobst, P. (2006). Mathematical prob-
lems in image processing: partial differential equa-
tions and the calculus of variations (second edition),
volume 147. Springer-Verlag.
Canny, F. (1986). A computational approach to edge detec-
tion. IEEE TPAMI, 8(6):679–698.
Caselles, V. and Morel, J. (1998). Introduction to the special
issue on partial differential equations and geometry-
driven diffusion in image processing and analysis.
IEEE TIP, 7(3):269–273.
Catt
´
e, F., Lions, P., Morel, J., and Coll, T. (1992). Image
selective smoothing and edge detection by nonlinear
diffusion. SIAM J. of Num. Anal., pages 182–193.
Deriche, R. (1992). Recursively implementing the gaussian
and its derivatives. In ICIP, pages 263–267.
Freeman, W. T. and Adelson, E. H. (1991). The design and
use of steerable filters. IEEE TPAMI, 13:891–906.
Jacob, M. and Unser, M. (2004). Design of steerable filters
for feature detection using canny-like criteria. IEEE
TPAMI, 26(8):1007–1019.
Koenderink, J. (1984). The structure of images. Biological
cybernetics, 50(5):363–370.
Kornprobst, P., Deriche, R., and Aubert, G. (1997). Nonlin-
ear operators in image restoration. In ICVPR, pages
325–331.
Magnier, B., Huanyu, X., Montesinos, P., et al. (2013a).
Half gaussian kernels based shock filter for image de-
blurring and regularization. In VISAPP, volume 1,
pages 51–60.
Magnier, B. and Montesinos, P. (2013). Evolution of im-
age regularization with pdes toward a new anisotropic
smoothing based on half kernels. In IS&T/SPIE
Electronic Imaging, pages 86550M–86550M. Interna-
tional Society for Optics and Photonics.
Magnier, B., Montesinos, P., and Diep, D. (2011a). Fast
Anisotropic Edge Detection Using Gamma Correction
in Color Images. In IEEE 7th ISPA, pages 212–217.
Magnier, B., Montesinos, P., and Diep, D. (2011b). Texture
Removal in Color Images by Anisotropic Diffusion.
In VISAPP, pages 40–50.
Magnier, B., Montesinos, P., and Diep, D. (2012). A new
region-based pde for perceptual image restoration. In
VISAPP, pages 56–65.
Magnier, B., Montesinos, P., Diep, D., et al. (2013b). Per-
ceptual color image smoothing via a new region-based
pde scheme. Electronic Letters on Computer Vision
and Image Analysis 12 (1), 1:17–32.
Michelet, F., Da Costa, J.-P., Lavialle, O., Berthoumieu, Y.,
Baylou, P., and Germain, C. (2007). Estimating local
multiple orientations. Sig. Proc., 87(7):1655–1669.
Montesinos, P. and Magnier, B. (2010). A New Perceptual
Edge Detector in Color Images. In ACIVS, volume 2,
pages 209–220.
M
¨
uhlich, M., Friedrich, D., and Aach, T. (2012). Design
and implementation of multisteerable matched filters.
TPAMI, 34(2):279–291.
Perona, P. (1992). Steerable-scalable kernels for edge detec-
tion and junction analysis. IMAVIS, 10(10):663–672.
Perona, P. and Malik, J. (1990). Scale-space and edge
detection using anisotropic diffusion. IEEE TPAMI,
12:629–639.
Simoncelli, E. and Farid, H. (1996). Steerable wedge filters
for local orientation analysis. IEEE TIP, 5(9):1377–
1382.
Tschumperl
´
e, D. (2006). Fast anisotropic smoothing
of multi-valued images using curvature-preserving
PDE’s. IJCV, 68(1):65–82.
Tschumperl
´
e, D. and Deriche, R. (2005). Vector-valued im-
age regularization with pdes: A common framework
for different applications. IEEE TPAMI, pages 506–
517.
Wang, Z., Bovik, A., Sheikh, H., and Simoncelli, E. (2004).
Image quality assessment: From error visibility to
structural similarity. IEEE TIP, 13(4):600–612.
Weickert, J. (1999). Coherence-enhancing diffusion filter-
ing. IJCV, 31(2):111–127.
OrientedHalfGaussianKernelsandAnisotropicDiffusion
81
