
Dense Long-term Motion Estimation via Statistical Multi-step Flow
Pierre-Henri Conze
1,2
, Philippe Robert
1
, Tom´as Crivelli
1
and Luce Morin
2
1
Technicolor, Cesson-Sevigne, France
2
INSA Rennes, IETR/UMR 6164, UEB, Rennes, France
Keywords:
Long-term Motion Estimation, Dense Point Matching, Statistical Analysis, Long-term Trajectories, Video
Editing.
Abstract:
We present statistical multi-step flow, a new approach for dense motion estimation in long video sequences.
Towards this goal, we propose a two-step framework including an initial dense motion candidates generation
and a new iterative motion refinement stage. The first step performs a combinatorial integration of elementary
optical flows combined with a statistical candidate displacement fields selection and focuses especially on
reducing motion inconsistency. In the second step, the initial estimates are iteratively refined considering
several motion candidates including candidates obtained from neighboring frames. For this refinement task,
we introduce a new energy formulation which relies on strong temporal smoothness constraints. Experiments
compare the proposed statistical multi-step flow approach to state-of-the-art methods through both quantitative
assessment using the Flag benchmark dataset and qualitative assessment in the context of video editing.
1 INTRODUCTION
Dense motion estimation has known significant im-
provements since early works but deals mainly with
matching consecutive frames. Resulting dense mo-
tion fields, called optical flows, can straightforwardly
be concatenated to describe the trajectories of each
pixel along the sequence (Corpetti et al., 2002; Brox
and Malik, 2010; Sundaram et al., 2010). However,
both estimation and accumulation errors result in
dense trajectories which can rapidly diverge and be-
come inconsistent, especially for complex scenes in-
cluding non-rigid deformations, large motion, zoom-
ing, poorly textured areas, illumination changes...
Moreover, concatenating motion fields computed be-
tween consecutive frames does not allow to recover
trajectories after temporary occlusions.
Recent works have contributed to the purpose of
dense long-term motion estimation. Multi-frame op-
tical flow formulations (Salgado and S´anchez, 2007;
Papadakis et al., 2007; Werlberger et al., 2009; Volz
et al., 2011) have been presented but their tempo-
ral smoothness constraints are generally limited to a
small number of frames. (Sand and Teller, 2008) pro-
poses a sophisticated framework to compute semi-
dense trajectories using a particle representation but
the full density is not achieved. To overcome these
issues, Garg et al. describe in (Garg et al., 2013) a
variational approach with subspace constraints to gen-
erate trajectories starting from a reference frame in a
non-rigid context. They assume that the sequence of
displacement of any point can be expressed as a linear
combination of a low-rank motion basis. Therefore,
trajectories are estimated assuming that they must lie
close to this low dimensional subspace which im-
plicitly acts as a long-term regularization. However,
strong a-priori assumptions on scene contents must
be provided and dense tracking of multiple objects is
possible only if the reference frame is segmented.
The alternative concept of multi-step flow (Criv-
elli et al., 2012b; Crivelli et al., 2012a) focuses on
how to construct dense fields of correspondences over
extended time periods using multi-step optical flows
(optical flows computed between consecutive frames
or with larger inter-frame distances). Multi-step flow
sequentially merges a set of displacement fields at
each intermediate frame, up to the target frame. This
set is obtained via concatenation of multi-step optical
flows with displacement vectors already computed for
neighbouring frames. Multi-step estimations can han-
dle temporary occlusions since they can jump occlud-
ing objects. Contrary to (Garg et al., 2013), multi-step
flow considers both trajectory estimation between a
reference frame and all the images of the sequence
(from-the-reference) and motion estimation to match
each image to the reference frame (to-the-reference).
Despite its ability to handle both scenarios, multi-
step flow has two main drawbacks. First, it performs
545
Conze P., Robert P., Crivelli T. and Morin L..
Dense Long-term Motion Estimation via Statistical Multi-step Flow.
DOI: 10.5220/0004683005450554
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 545-554
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

the selection of displacement fields by relying only
on classical optical flow assumptions that can some-
times fail between distant frames. Second, the can-
didate displacement fields are based on previous esti-
mations. It ensures a certain temporal consistency but
can also propagate estimation errors along the follow-
ing frames of the sequence, until a new available step
gives a chance to match with a correct location again.
These limitations can be resolved by extending
to the whole sequence the combinatorial multi-step
integration and the statistical selection described in
(Conze et al., 2013) for dense motion estimation be-
tween a pair of distant frames. The underlying idea is
to first consider a large set composed of combinations
of multi-step optical flows and then to study the spa-
tial redundancy of the resulting candidates through a
statistical selection to finally select the best matches.
Toward our goal of dense motion estimation in
long video shots, we present the statistical multi-step
flow two-step framework. First, it extends (Conze
et al., 2013) to generate several initial dense corre-
spondences between the reference frame and each of
the subsequent images independently. Second, we
propose to provide an accurate final dense matching
by applying a new iterative motion refinement which
involves strong temporal smoothness constraints.
2 Statistical Multi-step Flow
Let us consider a sequence of N + 1 RGB images
{I
n
}
n∈[[0,...,N]]
including I
ref
considered as a reference
frame. In this work, we focus on dense motion es-
timation between the reference frame I
ref
and each
frame I
n
of the sequence and we aim at computing
from-the-reference and to-the-reference displacement
fields. From-the-reference displacement fields link
the reference frame I
ref
to the other frames I
n
and
therefore describe the trajectory of each pixel of I
ref
along the sequence. To-the-reference displacement
fields connect each pixel of I
n
to locations into I
ref
.
The proposed statistical multi-step flow performs
two main stages. The generation of several initial
dense motion correspondencesfor each pair of frames
{I
ref
,I
n
} independently is described in Section 2.1.
Section 2.2 presents the iterative motion refinement
through strong temporal consistency constraints.
2.1 Initial Motion Candidates
Generation
The goal of the initial motion candidates generation
is to compute for each pixel x
ref
(resp. x
n
) of I
ref
(resp. I
n
) K candidate positions in I
n
(resp. I
ref
). Each
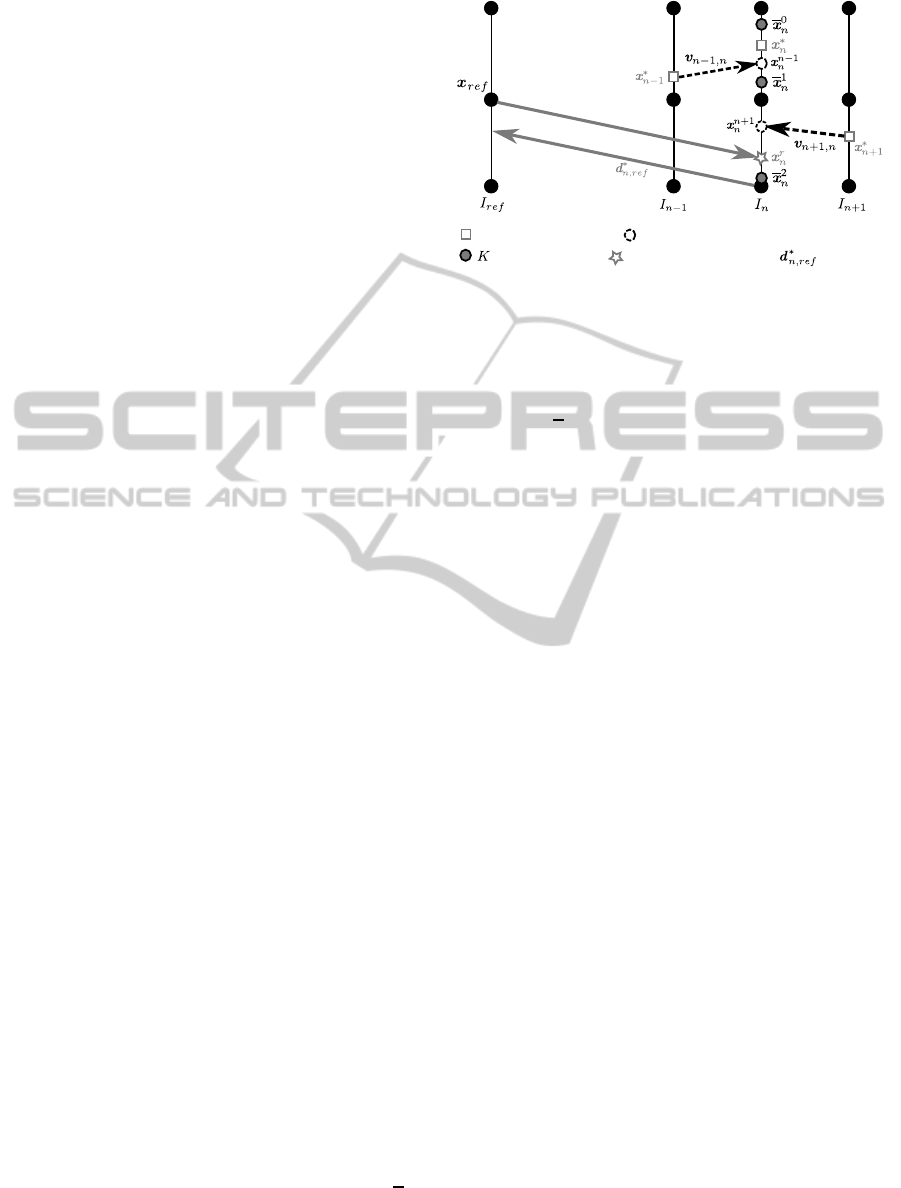
Figure 1: Multiple motion candidates are generated via a
guided-random selection among all possible motion paths.
This combinatorial integration (Conze et al., 2013) is done
independently for each pair {I
ref
,I
n
} which limits the corre-
lation between candidates selected forneighbouring frames.
pair of frames {I
ref
,I
n
} is processed independently.
Our explanations focus on the estimation of from-the-
reference displacement fields. In the following, we
describe the input data and recall the baseline method
(Conze et al., 2013) before focusing on how it has
been improved and extended to the whole sequence.
2.1.1 Input Optical Flows Fields
As inputs, our method considers a set of optical flow
fields estimated from each frame of the sequence in-
cluding I
ref
. These optical flows are previously es-
timated between consecutive frames or with larger
steps (Crivelli et al., 2012b), i.e. larger inter-frame
distances. Let S
n
= {s
1
,s
2
,... ,s
Q
n
} ⊂ {1,...,N − n}
be the set ofQ
n
possible steps at instant n. The follow-
ing set of optical flow fields starting from I
n
is there-
fore available: {v
n,n+s
1
,v
n,n+s
2
,... ,v
n,n+s
Q
n
}.
Input optical flow fields are provided with at-
tached occlusion and inconsistency masks. For the
pair {I
n
,I
n+s
i
} with s
i
∈ {1,..., N − n}, the occlusion
mask attached to the optical flow field v
n,n+s
i
indicates
the visibility of each pixel of I
n
in I
n+s
i
. The inconsis-
tency mask attached to v
n,n+s
i
distinguishes consistent
and inconsistent optical flow vectors among the ones
starting from pixels marked as visible (Robert et al.,
2012). This feature follows the idea that the backward
flow should be the exact opposite of the forward flow.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
546
2.1.2 Baseline Method (Conze et al., 2013)
The combinatorial multi-step integration and the sta-
tistical selection on which we rely on work as follows.
For the current pair {I
ref
,I
n
}, the combinatorial
multi-step integration consists in first of all consider-
ing all the possible from-the-reference motion paths
which start from each pixel x
ref
, run through the
sequence and end in I
n
. These motion paths are
built by concatenating all the possible sequences of
un-occluded input multi-step optical flow vectors be-
tween I
ref
and I
n
. A reasonable number of N
s
motion
paths are then selected through limitations in terms
of number of concatenations N
c
and via a guided-
random selection. Each remaining motion path leads
to a candidate position in I
n
(Fig. 1 top). Finally, we
obtain a set T
ref,n
(x
ref
) = {x
i
n
}
i∈[[0,...,K
x
ref
−1]]
of K
x
ref
candidate positions in I
n
for each pixel x
ref
of I
ref
.
A statistical-based selection stage then selects the
optimal candidate position among T
ref,n
(x
ref
). This
procedure involves: 1) a statistical criterion which
pre-selects a small set of candidates based on spatial
density and intrinsic inconsistency values; 2) a global
optimization which fuses these candidates to obtain
the optimal one while including spatial regularization.
2.1.3 Improvements
The combinatorial multi-step integration and the sta-
tistical selection we briefly reviewed has been im-
proved to provide further focus to inconsistency re-
duction between from/to-the-reference vectors. First,
we use only multi-step optical flow vectors considered
as consistent according to their inconsistency masks
to generate motion paths between I
ref
and I
n
. Sec-
ond, we introduce an outlier removal step before the
statistical selection which orders the candidates of
T
ref,n
(x
ref
) with respect to their inconsistency values.
A percentageR
%
of bad candidatesis removedand the
selection is performed on the remaining ones. Third,
at the end of the combinatorial integration and the se-
lection procedure between I
ref
and I
n
, the optimal dis-
placement field is incorporated into the processing be-
tween I
n
and I
ref
which aims at enforcing the motion
consistency between from/to-the-reference fields.
Compared to (Conze et al., 2013), our displace-
ment fields selection procedure combines differently
statistical selection and global optimization. For
each x
ref
∈ I
ref
, we select among T
ref,n
(x
ref
) K
sp
=
2 × K candidates through statistical selection, with
K
sp
< K
x
ref
. Then, we randomly group by pairs
these K
sp
candidates and choose the K best ones
x
k
n
∀k ∈ [[0,...,K− 1]] by pair-wise fusing them follow-
ing a global flow fusion approach. Finally, this same
previous estimation
candidates from neighbouring frames
initial candidates
candidate coming from
inverted
Figure 2: The displacement field d
∗
ref,n
is questionned by
generating for each pixel x
ref
competing candidates in I
n
.
global optimization method fuses these K best candi-
dates to obtain an optimal one: x
∗
n
. In other words,
these two last steps give a set of candidate displace-
ment fields
d
k
ref,n
and finally d
∗
ref,n
, the optimal one.
For pairs of frames relatively close or in case of
temporary occlusions, the statistical selection is not
adapted due to the small amount of candidates. There-
fore, between K+ 1 and K
sp
candidates, we use only
the global optimization up to obtain the K best ones.
Our approach is applied bi-directionally. An ex-
actly similar processing between I
n
and I
ref
leads to K
initial to-the-reference candidate displacement fields.
2.1.4 Extention to the whole Sequence
This improved version of the combinatorial integra-
tion and the statistical selection of (Conze et al., 2013)
processes independently all the pairs {I
ref
,I
n
}. Only
N
c
, the maximum number of concatenations, changes
with respect to the temporal distance between frames.
In practice, N
c
is computed using Eq. (1) which leads
to a good compromise between a too large number
of concatenations which would lead to large propa-
gation errors and the opposite situation which would
limit the effectiveness of the statistical processing due
to an insufficient number of candidates.
N
c
(n) =
| n− ref | if | n − ref |≤ 5
α
0
.log10(α
1
.|n− ref|) otherwise
(1)
The guided-random selection (Conze et al., 2013)
which selects for each pair of frames {I
ref
,I
n
} one
part of all the possible motion paths limits the corre-
lation between candidates respectively estimated for
neighbouring frames. This avoids the situation in
which a single estimation error is propagated and
therefore badly influences the whole trajectory. The
example Fig. 1 shows the motion paths selected by
the guided-random selection for pairs {I
ref
,I
n
} and
DenseLong-termMotionEstimationviaStatisticalMulti-stepFlow
547

{I
ref
,I
n+1
}. We notice that motion paths between
I
ref
and I
n+1
are not highly correlated with those be-
tween I
ref
and I
n
. Indeed, the sets of optical flow
vectors involved in both cases are not the same ex-
cept for v
ref,ref+1
and v
ref,n−1
which are then con-
catenated with different vectors. v
n−2,n
contributes
for both cases but the considered vectors do not start
from the same position. These considerations about
the statistical independence of the resulting displace-
ment fields are not addressed by existing methods for
which a strong temporal correlation is inescapable.
2.2 Iterative Motion Refinement
The previous stage guarantees a low correlation be-
tween the initial motion candidates respectively es-
timated for pairs {I
ref
,I
n
}. Without losing this key
characteristic, this second stage aims at iteratively re-
fining the initial estimates while enforcing the tempo-
ral smoothness along the sequence.
We propose to question the matching between
each pixel x
ref
(resp. x
n
) of I
ref
(resp. I
n
) and the
selected position x
∗
n
(resp. x
∗
ref
) in I
n
(resp. I
ref
) es-
tablished during the previous iteration (or the initial
motion candidates generation stage if the current iter-
ation is the first one). For this task, we generate sev-
eral competing candidates which are compared to x
∗
n
(resp. x
∗
ref
) through a global optimization approach.
2.2.1 Competing Candidates
The competing candidates used to question x
∗
n
(resp.
x
∗
ref
) are illustrated in Fig. 2 and deals with:
• the K initial candidate positions x
k
n
(resp. x
k
ref
)
∀k ∈ [[0, .. ., K− 1]] (obtained Section 2.1),
• a candidate position coming from the previous es-
timation of d
∗
n,ref
(resp. d
∗
ref,n
) which is inverted
to obtain x
r
n
(resp. x
r
ref
), as illustrated in Fig. 2,
• candidates from neighbouring frames to enforce
temporal smoothing. Let W be the temporal win-
dow of width w centered around I
n
. Between I
ref
and I
n
, we use the optical flow fields v
m,n
between
I
m
and I
n
with m ∈ [[n−
w
2
,... ,n+
w
2
]] and m 6= n
to obtain from x
∗
m
∈ I
m
the new candidate x
m
n
in I
n
.
2.2.2 Global Optimization Approach
We perform a global optimization method in order to
fuse the previously described competing candidates
into a single optimal displacement field.
In the from-the-reference case, we introduce L =
{l
x
ref
} as a labeling of pixels x
ref
where each label
indicates x
l
x
ref
n
, one of the candidates listed above. Let
Figure 3: Matching cost and Euclidean distances ed
n,m
and
ed
m,n
defined with respect to each temporal neighboring
candidate x
∗
m
and involved in the proposed energy. These
three terms act as strong temporal smoothness constraints.
d
l
x
ref
ref,n
be the corresponding motion vector. We define
the energy in Eq. (2) and minimize it with respect to
L using fusion moves (Lempitsky et al., 2010):
E
ref,n
(L) = E
d
ref,n
(L) + E
r
ref,n
(L) =
∑
x
ref
ρ
d
(ε
d
ref,n
)
+
∑
x
ref
,y
ref
α
x
ref
,y
ref
ρ
r
(
d
l
x
ref
ref,n
(x
ref
) − d
l
y
ref
ref,n
(y
ref
)
1
) (2)
The data term E
d
ref,n
, described with more details
in Eq. (3), involves both matching cost and inconsis-
tency value with respect to d
l
x
ref
ref,n
(Conze et al., 2013).
In addition, we propose to introduce strong temporal
smoothness constraints into the energy formulation:
ε
d
ref,n
= C(x
ref
,d
l
x
ref
ref,n
(x
ref
)) + Inc(x
ref
,d
l
x
ref
ref,n
(x
ref
))
+
n+
w
2
∑
m=n−
w
2
m6=n
C(x
l
x
ref
n
,x
∗
m
− x
l
x
ref
n
) + ed
m,n
+ ed
n,m
(3)
The temporal smoothness constraints translate
into three new terms which are computed with respect
to each neighbouring candidate x
∗
m
defined for the
frames inside the temporal window W. These terms
are illustrated in Fig. 3 and deal more precisely with:
• the matching cost between x
l
x
ref
n
∈ I
n
and x
∗
m
of I
m
,
• the euclidean distance ed
m,n
between x
l
x
ref
n
and the
ending point of the optical flow v
m,n
starting from
x
∗
m
(see Eq. (4)). ed
m,n
encourages the selection of
x
m
n
, the candidate coming from I
m
via the optical
flow field v
m,n
and therefore tends to strengthen
the temporal smoothness. Indeed, for x
m
n
, the eu-
clidean distance ed
m,n
is equal to 0.
ed
m,n
=
(x
ref
+ d
l
x
ref
ref,n
) − (x
ref
+ d
∗
ref,m
+ v
m,n
)
2
(4)
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
548

• the euclidean distance ed
n,m
between x
∗
m
and the
ending point of the optical flow vector v
n,m
start-
ing from x
l
x
ref
n
(see Eq. (5)). If v
m,n
is consistent,
i.e. v
m,n
≈ −v
n,m
, ed
n,m
is approximately equal to
0 for x
m
n
, the candidate coming from I
m
, whose
selection is again promoted.
ed
n,m
=
(x
ref
+ d
∗
ref,m
) − (x
ref
+ d
l
x
ref
ref,n
+ v
n,m
)
2
(5)
The regularization term E
r
ref,n
involves motion
similarities with neighbouring positions, as shown in
Eq. (2). α
x
ref
,y
ref
accounts for local color similarities
in the reference frame I
ref
. The robust functions ρ
d
and ρ
r
are respectively the negative log of a Student-t
distribution and the Geman-McClure function.
The refinement of to-the-reference displacement
fields with our approach is straightforward except that
the data term involves neither the matching cost be-
tween the current candidate and the temporal neigh-
bouring one nor the euclidean distance ed
m,n
due to
trajectories which can not be handled in this direction.
The global optimization method fuses the dis-
placement fields by pairs and finally chooses to up-
date or not the previous estimations with one of the
previously described candidates. The motion refine-
ment phase consists in applying this technique for
each pair of frames {I
ref
,I
n
} in from-the-reference
and to-the-reference directions. The pairs {I
ref
,I
n
}
are processed in a random order in order to encourage
temporal smoothnesswithout introducing a sequential
correlation between the resulting displacement fields.
This motion refinement phase is repeated itera-
tively N
it
times where one iteration corresponds to the
processing of all the pairs {I
ref
,I
n
}. The proposed
statistical multi-step flow is done once the initial mo-
tion candidates generation and the N
it
iterations of
motion refinement have been performed.
3 EXPERIMENTS
Our experiments focus on the following sequences:
MPI S1 (Granados et al., 2012) Fig.4 and 6a-h, Hope
Fig.6i-p, Newspaper Fig.6q-t, Walking Couple Fig.7
and Flag (Garg et al., 2013) Fig.8. The proposed sta-
tistical multi-step flow is referred to as StatFlow in the
following. For the experiments, the following param-
eters have been used: N
c
= 7, N
s
= 100, R
%
= 50%,
K = 3, α
0
= 3, α
1
= 15, w = 5. The set of steps and
input optical flow estimators will be specified for each
experiment and each sequence.
Experiments have been conducted as follows. In
Section 3.1, we evaluate the performance of our ex-
tended version of the combinatorial integration and
the statistical selection (Conze et al., 2013) through
registration and PSNR assessment. The effects of the
iterative motion refinement are also studied. Then, we
compare StatFlow to state-of-the-art methods through
quantitative assessment using the Flag dataset (Garg
et al., 2013) (Section 3.2) and qualitative assessment
via texture propagation and tracking (Section 3.3).
3.1 Registration and PSNR Assessment
The first experiment aims at showing how the im-
provements we made with respect to (Conze et al.,
2013) impacts the quality of the displacement fields.
We focus on frames pairs taken from MPI S1 and
Newspaper (NP). The sets of steps are 1− 5, 10 (NP),
15 (MPI S1), 20 (NP) and 30 (NP). The algorithms are
performed taking input multi-step optical flows com-
puted with a 2D version of the disparity estimator de-
scribed in (Robert et al., 2012), referred to as 2D-DE.
We compare the optimal displacement fields ob-
tained in output of our initial motion estimates gener-
ation (Section 2.1) with those resulting from (Conze
et al., 2013). The comparison is done through reg-
istration and PSNR assessment. For a given pair
{I
ref
,I
n
}, the final fields are used to reconstruct
I
ref
from I
n
through motion compensation and color
PSNR scores are computed between I
ref
and the reg-
istered frame for non-occluded pixels.
Tables 1 and 2 show the PSNR scores for various
distances between I
ref
and I
n
respectivelyon the kiosk
of MPI S1 (Fig.4) and on whole images of News-
paper (Fig.6q-t). Results on MPI S1 show that the
initial phase of StatFlow outperforms the combinato-
rial integration and the statistical selection of (Conze
et al., 2013) for all pairs. An example of registra-
tion of the kiosk for a distance of 20 frames is given
Fig.4. Multi-step estimations deal satisfactorily with
the temporary occlusion. Experiments on Newspaper
reveal the same finding: the novelty in terms of incon-
sistency reduction improves the displacement fields
quality. Moreover, the iterative motion refinement
stage (N
it
= 9) allows to obtain better PSNR scores
for all pairs compared to the initial stage of StatFlow.
3.2 Comparisons with Flag Dataset
Quantitative results have been obtained using the
dense ground-truth optical flow data provided by the
Flag dataset (Garg et al., 2013) for the Flag sequence
(Fig. 8). Experiments focus on:
DenseLong-termMotionEstimationviaStatisticalMulti-stepFlow
549
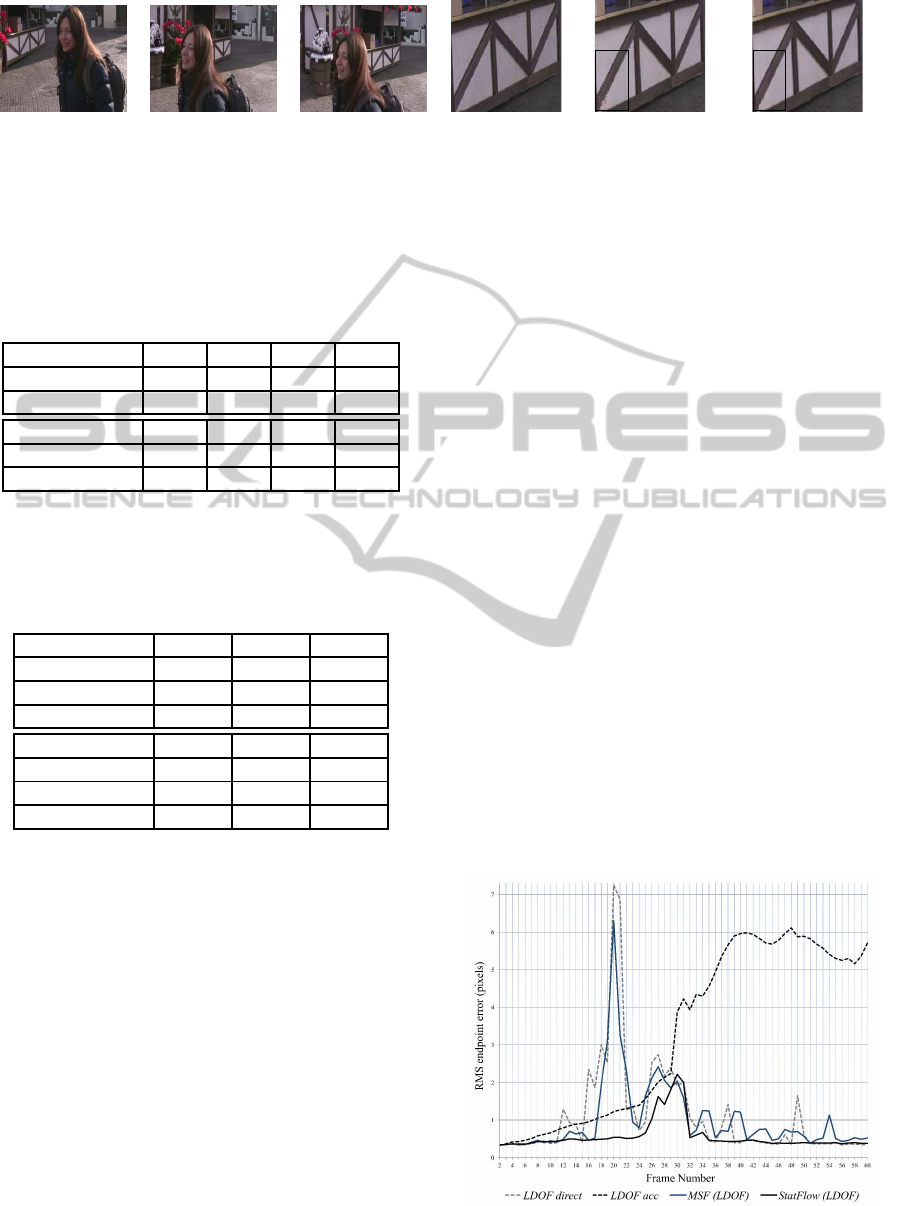
(a) I
25
(b) I
40
(c) I
45
(d) I
25
(e) (Conze et al., 2013) (f) StatFlow initial phase
Figure 4: Source frames of the MPI S1 sequence (Granados et al., 2012) and reconstruction of the kiosk of I
25
from I
45
with: e) the combinatorial integration and the statistical selection introduced in (Conze et al., 2013), f) the proposed extended
version described in Section 2.1 (initial phase of StatFlow). Black boxes focus on differences between both methods.
Table 1: Registration and PSNR assessment with the com-
binatorial integration and the statistical selection introduced
in (Conze et al., 2013) and the proposed extended version
described in Section 2.1 (initial phase of StatFlow). PSNR
scores are computed on the kiosk of MPI S1 (Fig. 4).
Frame pairs {25,45} {25,46} {25,47} {25,48}
(Conze et al., 2013) 21.83 24.98 25.56 25.83
StatFlow initial phase 29.02 28.4 27.27 27.23
Frame pairs {25,49} {25,50} {25,51} {25,52}
(Conze et al., 2013) 25.04 24.83 24.48 24.3
StatFlow initial phase 26.84 26.33 26.1 25.69
Table 2: Registration and PSNR assessment with: 1) com-
binatorial integration and statistical selection introduced in
(Conze et al., 2013), 2) proposed extended version (Stat-
Flow init. phase), 3) whole StatFlow method. PSNR scores
are computed on whole images of Newspaper (Fig.6q-t).
Frame pairs {160,180} {160,190} {160,200}
(Conze et al., 2013) 22.50 21.21 18.59
StatFlow initial phase 22.70 21.39 19.28
StatFlow 22.93 22.18 20.25
Frame pairs {160,210} {160,220} {160,230}
(Conze et al., 2013) 17.12 15.87 15.76
StatFlow initial phase 18.21 17.12 16.58
StatFlow 18.68 17.40 16.81
• direct estimation between each pair {I
ref
,I
n
}
using LDOF (Brox and Malik, 2011), ITV-L1
(Wedel et al., 2009) and the keypoint-based non-
rigid registration of (Pizarro and Bartoli, 2012),
• concatenation of optical flows computed between
consecutive frames using LDOF (LDOF acc),
• multi-frame subspace flow (MFSF) (Garg et al.,
2013) using PCA or DCT basis,
• multi-step flow fusion (MSF) (Crivelli et al.,
2012a) with LDOF multi-step optical flows,
• StatFlow (N
it
= 3) with LDOF optical flows.
For the comparison task, Tab. 3 gives for all the previ-
ously described methods the RMS (root mean square)
endpoint errors between the respective obtained dis-
placement fields and the ground-truth data. RMS er-
rors are estimated for all the foreground pixels and
for all the pairs of frames {I
ref
,I
n
} together. RMS er-
rors computed for each pair of frames are shown in
Fig.5 for all the methods based on LDOF: LDOF di-
rect, LDOF acc, MSF (LDOF) and StatFlow (LDOF).
The last two multi-step strategies have considered as
inputs steps 1− 5, 8, 10, 15, 20, 25, 30, 40 and 50.
We can firstly observe that LDOF acc rapidly di-
verge. This is due to both estimation errors which are
propagated along trajectories and accumulation errors
inherent to the interpolation process. Moreover, the
results obtained through direct motion estimation are
reasonably good, especially for (Pizarro and Bartoli,
2012). LDOF direct gives a lower RMS endpoint er-
ror than LDOF acc (1.74 against 4). However, it is
not possible to draw conclusions in the light of the
Flag sequence because the flag comes back approx-
imately to its initial position at the end of the se-
quence (Fig.8a,g). Motion estimation for complex
scenes cannot generally rely only on direct estimation
and combining optical flow accumulations and direct
matching is clearly a more suitable strategy.
Tab. 3 and Fig. 5 prove that with the same optical
flows as inputs, StatFlow shows a clear improvement
compared to MSF (0.69 against 1.41). Although both
methods achieve the same quality for first pairs or for
some pairs which coincide with existing steps, other
displacement fields are computed with a better ac-
curacy using StatFlow. Moreover, StatFlow(LDOF)
Figure 5: RMS endpoint errors for each pair {I
ref
,I
n
} along
Flag sequence (Fig. 8) with different methods.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
550
(a) Original image I
115
(c) Prop. to I
125
, MSF (2D-DE) (d) Prop. to I
130
, MSF (2D-DE) (e) Prop. to I
137
, MSF (2D-DE)
(b) Texture insertion in I
115
(f) Prop. to I
125
, StatFlow (2D-DE) (g) Prop. to I
130
, StatFlow (2D-DE) (h) Prop. to I
137
, StatFlow (2D-DE)
(i) Original image I
5036
(k) Prop. to I
5046
, MSF (2D-DE) (l) Prop. to I
5052
, MSF (2D-DE) (m) Prop. to I
5063
, MSF (2D-DE)
(j) Logo insertion in I
5036
(n) Prop. to I
5046
, StatFlow (2D-DE) (o) Prop. to I
5052
, StatFlow (2D-DE) (p) Prop. to I
5063
, StatFlow (2D-DE)
(q) Logo insertion in I
230
(r) Prop. to I
210
, StatFlow (2D-DE) (s) Prop. to I
196
, StatFlow (2D-DE) (t) Prop. to I
170
, StatFlow (2D-DE)
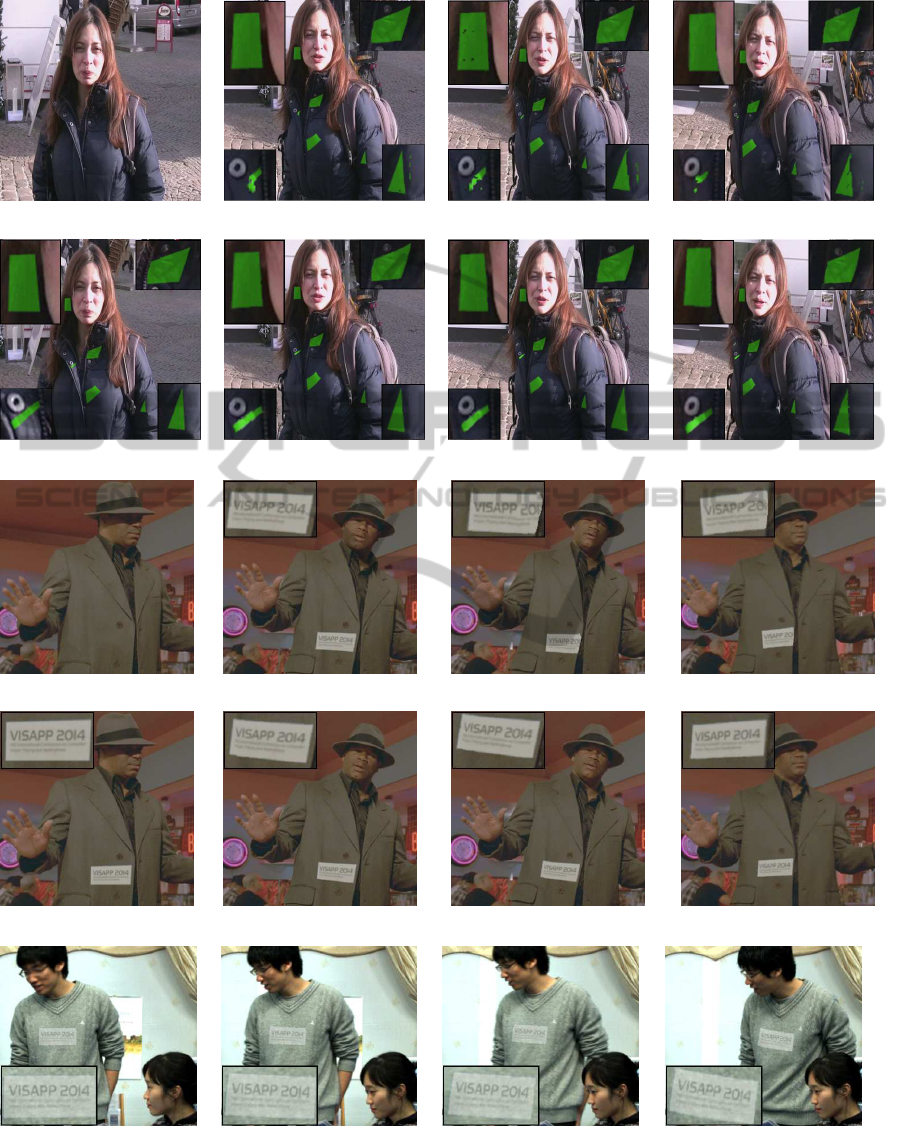
Figure 6: Texture/logo insertion in I
115
(resp. I
5036
and I
230
) and propagation along the MPI-S1 (resp. Hope and Newspaper)
sequence up to I
137
(resp. I
5063
and I
170
) using: 1) multi-step flow fusion (MSF) (Crivelli et al., 2012a) with multi-step optical
flow fields from (Robert et al., 2012) (2D-DE): MSF(2D-DE); 2) the proposed statistical multi-step flow (StatFlow) with
2D-DE multi-step optical flow fields: StatFlow (2D-DE).
DenseLong-termMotionEstimationviaStatisticalMulti-stepFlow
551
(a) Original image I
0
(d) Propagation to I
20
, LDOF acc (e) Propagation to I
25
, LDOF acc (f) Propagation to I
40
, LDOF acc
(b) Logo insertion in I
0
(g) Prop. to I
20
, MSF (2D-DE) (h) Prop. to I
25
, MSF (2D-DE) (i) Prop. to I
40
, MSF (2D-DE)
(c) Original image I
40
(j) Prop. to I
20
, StatFlow (2D-DE) (k) Prop. to I
25
, StatFlow (2D-DE) (l) Prop. to I
40
, StatFlow (2D-DE)
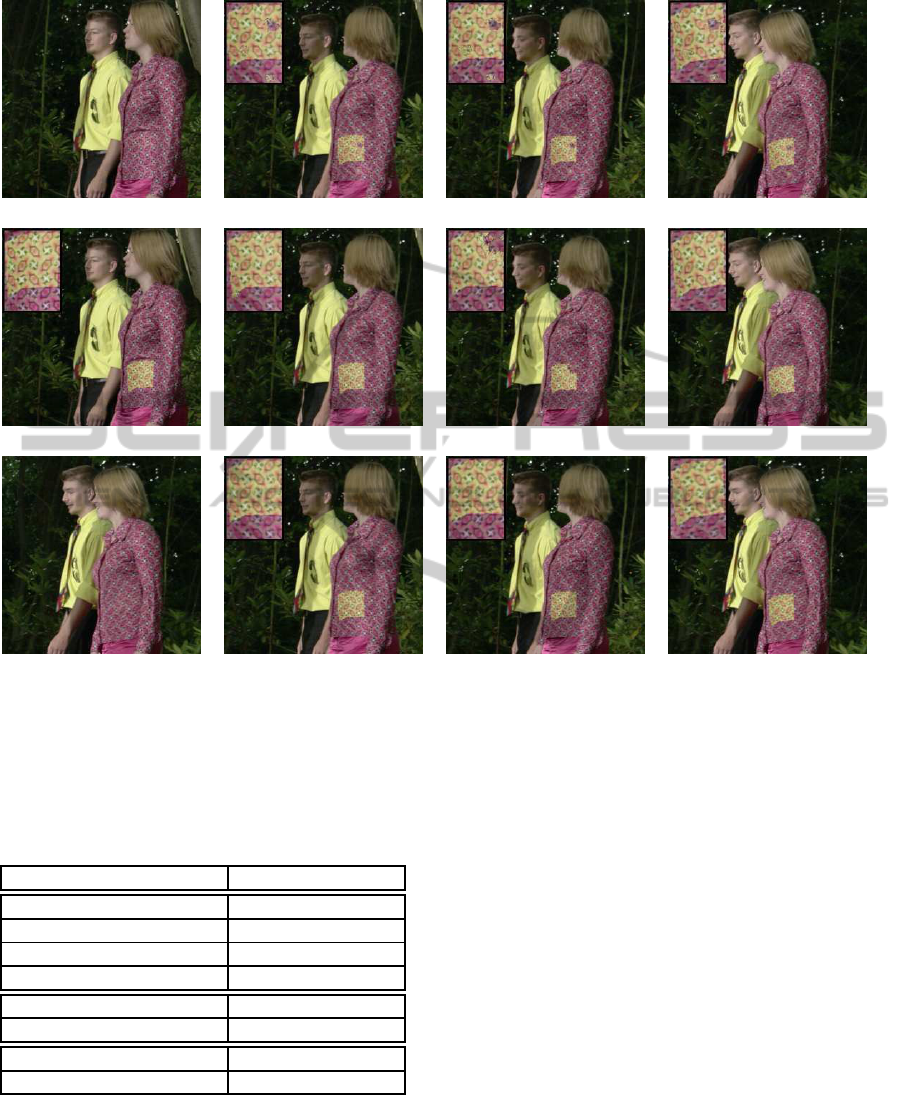
Figure 7: Texture insertion in I
0
and propagation up to I
40
(Walking Couple sequence). We compare: d-f) concatenation of
LDOF (Brox and Malik, 2011) optical flow fields computed between consecutive frames (LFOF acc); g-i) multi-step flow
fusion (MSF) (Crivelli et al., 2012a) using multi-step optical flow fields from (Robert et al., 2012) (2D-DE); j-l) the proposed
statistical multi-step flow (StatFlow) using 2D-DE multi-step optical flow fields.
Table 3: RMS endpoint errors for different methods on the
Flag benchmark dataset (Garg et al., 2013).
Method RMS endpoint error (pixels)
StatFlow (LDOF) 0.69
MSF (Crivelli et al., 2012a) (LDOF) 1.41
LDOF direct (Brox and Malik, 2011) 1.74
LDOF acc (Brox and Malik, 2011) 4
MFSF-PCA (Garg et al., 2013) 0.69
MFSF-DCT (Garg et al., 2013) 0.80
(Pizarro and Bartoli, 2012) direct 1.24
ITV-L1 direct (Wedel et al., 2009) 1.43
reaches the same RMS error with respect to MFSF-
PCA, the best one of the MFSF approaches, with 0.69.
This proves that StatFlow is competitive compared to
challenging state-of-the-art methods.
3.3 Texture Propagation and Tracking
We aim now at showing that our method provides sat-
isfying results in a wide set of complex scenes. More-
over, we focus on the comparison between StatFlow
(N
it
= 9) and MSF (Crivelli et al., 2012a) to prove that
StatFlow performs a more efficient integration and se-
lection procedure compared to MSF using the same
optical flows as inputs. Experiments have been firstly
conducted in the context of video editing: we evaluate
the accuracy of both methods by motion compensat-
ing in I
n
∀n textures/logos manually inserted in I
ref
.
In Fig. 6 and 7, textures/logos have been respec-
tively inserted in I
115
of MPI S1, I
5036
of Hope, I
230
of Newspaper and I
0
of Walking Couple. To-the-
reference fields computedwith StatFlow (2D-DE) and
MSF (2D-DE) serve to propagate textures/logos up to
respectively I
137
, I
5063
, I
170
and I
40
. 2D-DE has been
chosen for its good results for video editing tasks. The
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
552
(a) I
1
(b) I
10
(c) I
20
(d) I
30
(e) I
40
(f) I
50
(g) I
60
Figure 8: Source frames of the Flag sequence (Garg et al., 2013).
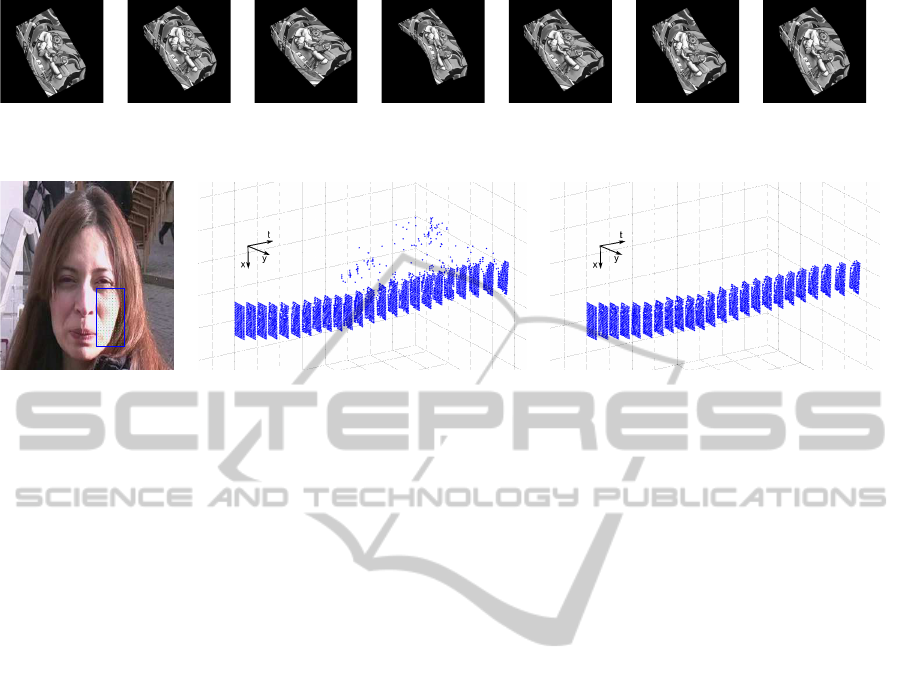
(a) I
115
with tracking area (b) Point tracking from I
115
to I
138
, MSF (2D-DE) (c) Point tracking from I
115
to I
138
, StatFlow (2D-DE)
Figure 9: Point tracking from I
115
up to I
138
, MPI-S1 sequence (Granados et al., 2012). We compare: b) multi-step flow
fusion (MSF) (Crivelli et al., 2012a) using multi-step optical flow fields from (Robert et al., 2012) (2D-DE); c) the proposed
statistical multi-step flow (StatFlow) method using 2D-DE multi-step optical flow fields.
steps involved are: 1− 5, 8 (Hope), 10, 15 (except for
NP), 20 (Hope, NP), 30 (MPI S1, NP).
Given these results, it appears that MSF some-
times distorts structures (bottom left zoom Fig.6c-
e, Fig.6l,m), makes shadow textures appear (bot-
tom right zoom Fig.6c-e) and does not estimate mo-
tion with accuracy (top right zoom Fig.6e, Fig.6l,m).
Visual results with StatFlow reveal a better long-
term propagation (see also Fig.6r-t). Fig.7 compares
StatFlow(2D-DE) and MSF(2D-DE) with LDOF acc.
We observe that LDOF acc badly performs motion es-
timation for periodic structures. MSF encounters also
matching issues (Fig.7h) whereas StatFlow performs
propagation without any visible artifacts.
Finally, StatFlow and MSF are assessed through
point tracking. In Fig. 9, the bottom right part of
the woman face is tracked from I
115
to I
138
(MPI S1).
The 2D+t visualization indicates that some trajecto-
ries drift to the background with MSF. This illustrates
the inherent issue of MSF which propagates estima-
tion errors due to the sequential processing. Con-
versely, StatFlow provides accurate fields while lim-
iting the temporal correlation between displacement
fields respectively estimated for neighbouringframes.
4 CONCLUSIONS
We present statistical multi-step flow, a two-step
framework which performs dense long-term motion
estimation. Our method starts by generating initial
dense correspondences with a focus on inconsistency
reduction. For this task, we perform a combinato-
rial integration of consistent optical flows followed
by an efficient statistical selection. This procedure
is applied independently between a reference frame
and each frame of the sequence. It guarantees a
low temporal correlation between the resulting cor-
respondences respectively estimated for each of these
pairs. We propose then to enforce temporal smooth-
ness through a new iterative motion refinement. It
considers several motion candidates including candi-
dates from neighboring frames and involves a new
energy formulation with temporal smoothness con-
straints. Experiments evaluate the effectiveness of
our approach compared to state-of-the-art methods
through quantitative assessment using dense ground-
truth data and qualitative assessment via texture prop-
agation and tracking for a wide set of complex scenes.
REFERENCES
Brox, T. and Malik, J. (2010). Object segmentation by long
term analysis of point trajectories. European Confer-
ence on Computer Vision, pages 282–295.
Brox, T. and Malik, J. (2011). Large displacement optical
flow: descriptor matching in variational motion esti-
mation. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 33(3):500–513.
Conze, P.-H., Crivelli, T., Robert, P., and Morin, L. (2013).
Dense motion estimation between distant frames:
combinatorial multi-step integration and statistical se-
lection. In IEEE International Conference on Image
Processing.
Corpetti, T., M´emin,
´
E., and P´erez, P. (2002). Dense esti-
DenseLong-termMotionEstimationviaStatisticalMulti-stepFlow
553

mation of fluid flows. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 24(3):365–380.
Crivelli, T., Conze, P.-H., Robert, P., Fradet, M., and P´erez,
P. (2012a). Multi-Step Flow Fusion: Towards accu-
rate and dense correspondences in long video shots.
British Machine Vision Conference.
Crivelli, T., Conze, P.-H., Robert, P., and P´erez, P. (2012b).
From optical flow to dense long term correspon-
dences. In IEEE International Conference on Image
Processing.
Garg, R., Roussos, A., and Agapito, L. (2013). A vari-
ational approach to video registration with subspace
constraints. International Journal of Computer Vision.
Granados, M., Kim, K. I., Tompkin, J., Kautz, J., and
Theobalt, C. (2012). MPI-S1. http://www.mpi-
inf.mpg.de/ granados/projects/vidbginp/index.html.
Lempitsky, V., Rother, C., Roth, S., and Blake, A. (2010).
Fusion moves for Markov random field optimization.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 32(8):1392–1405.
Papadakis, N., Corpetti, T., and M´emin, E. (2007). Dy-
namically consistent optical flow estimation. In IEEE
International Conference on Computer Vision.
Pizarro, D. and Bartoli, A. (2012). Feature-based de-
formable surface detection with self-occlusion reason-
ing. International Journal of Computer Vision.
Robert, P., Th´ebault, C., Drazic, V., and Conze, P.-H.
(2012). Disparity-compensated view synthesis for
s3D content correction. In SPIE IS&T Electronic
Imaging Stereoscopic Displays and Applications.
Salgado, A. and S´anchez, J. (2007). Temporal constraints
in large optical flow estimation. In Computer Aided
Systems Theory Eurocast, pages 709–716.
Sand, P. and Teller, S. J. (2008). Particle video: Long-range
motion estimation using point trajectories. Interna-
tional Journal of Computer Vision, 80(1):72–91.
Sundaram, N., Brox, T., and Keutzer, K. (2010). Dense
point trajectories by GPU-accelerated large displace-
ment optical flow. European Conference on Computer
Vision, pages 438–451.
Volz, S., Bruhn, A., Valgaerts, L., and Zimmer, H. (2011).
Modeling temporal coherence for optical flow. In
IEEE International Conference on Computer Vision.
Wedel, A., Pock, T., Zach, C., Bischof, H., and Cremers,
D. (2009). An improved algorithm for TV-L1 optical
flow. In Statistical and Geometrical Approaches to
Visual Motion Analysis, pages 23–45. Springer.
Werlberger, M., Trobin, W., Pock, T., Wedel, A., Cremers,
D., and Bischof, H. (2009). Anisotropic Huber-L1 op-
tical flow. British Machine Vision Conference.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
554
