
About the Impact of Pre-processing Tools on Segmentation Methods
Applied for Tree Leaves Extraction
Manuel Grand-Brochier
1
, Antoine Vacavant
2
, Robin Strand
3
, Guillaume Cerutti
1
and Laure Tougne
1
1
LIRIS UMR5205 CNRS, University Lumiere Lyon 2, 5 av. Pierres Mendes France, 69676 Bron, France
2
ISIT UMR6284 CNRS, University d’Auvergne, 28 pl. Henri Dunant, 63001 Clermont-Ferrand, France
3
Centre for Image Analysis, Uppsala University, SE-75105 Uppsala, Sweden
Keywords:
Tree Leaves Segmentation, Comparative Study, Distance Map, Pre-processing Tools.
Abstract:
In this paper, we present a comparative study highlighting the improvements provided by pre-processing tools,
such as input stroke or use of distance map for segmentation approaches. We propose in particular to highlight
new methods for calculating distance map based on the prediction of changes in local color (published by
G. Cerutti et al. in ReVeS Participation - Tree Species Classification Using Random Forests and Botanical
Features. CLEF 2012). We study differents methods using thresholding, clustering, or even active contours,
tested for an issue of tree leaves extraction. The observation criteria, such as Dice index, SSIM or MAD for
example, allow us to analyze the performance obtained by each approach and in particular those of the GAC
method, which are better for this context.
1 CONTEXT AND MOTIVATION
Segmentation tools are increasingly present in many
approaches to different areas, ranging from robotics
to computer vision or also for medical imaging. The
methodological and technological advances (smart-
phones, multiprocessor, ...) allow scientists and en-
gineers to develop projects/applications focused on
different themes such as security, automation or also
environment. In this paper we are interested es-
pecially in the latter theme and we can cite Leafs-
nap
1
, Pl@ntNet
2
and Folia
3
, which develop smart-
phone applications for analysis and identification of
tree leaves. The Folia
3
application presents the ad-
vantage of being usuable on natural background. Its
first step is based on segmentation tools and takes
an important part in the performance of the appli-
cation. Indeed, the quantity and quality of informa-
tion directly extracted affect the description and con-
sequently identification. It is therefore essential to op-
timize and improve existing approaches. We propose
a study of the impact of pre-processing tools on seg-
mentation methods. We focus our observations on the
extraction of tree leaves and we want to highlight a
1
http://leafsnap.com/
2
http://www.plantnet-project.org/papyrus.php
3
https://itunes.apple.com/fr/app/folia/id547650203?mt=8
new approach based on the prediction of changes in
local color, proposed by Cerutti (Cerutti et al., 2012).
The literature references many segmentation
methods, based on thresholds, non-linear modeling
tools or iterative deformations for example. The first
edge segmentation methods have appeared in the 70s
and they were based on thresholding gradients or his-
tograms (Otsu, 1979; Marr and Hildreth, 1980; Wang
and Haralick, 1984; Canny, 1986). Subsequently,
Kass (Kass et al., 1987) introduced in 1987 the active
contour (or snakes), aimed to deform an initial con-
tour in order to better define the edge of the object to
segment. Then, variations have been proposed, based
on parametric models (Zimmer et al., 2002; Chan and
Vese, 2001) or coupled with tools such as B-splines
(Brigger et al., 2000) for example. Other methods
are based on clustering of regions, in order to isolate
each object in the image. We can cite Split & Merge
and MeanShift approaches (Horowitz and Pavlidis,
1974; Cheng, 1995). More recently, various improve-
ments have been proposed (Lynch et al., 2006; Hor-
vath, 2006; Kurtz at al., 2010). In 1989, Greig and al.
(Greig et al., 1989) publish a method of image analy-
sis based on the theory of graphcuts. This algorithm
was subsequently modified (Boykov and Jolly, 2001;
Rother et al., 2004; Felzenszwalb and Huttenlocher,
2004) in view of producing a segmentation based on
region growing. By using the analogy between image
507
Grand-Brochier M., Vacavant A., Strand R., Cerutti G. and Tougne L..
About the Impact of Pre-processing Tools on Segmentation Methods - Applied for Tree Leaves Extraction.
DOI: 10.5220/0004690405070514
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 507-514
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

and topographic relief, Beucher et al. (Beucher and
Lantujoul, 1979), and more recently Salman (Beucher
and Meyer, 1993; Salman, 2006), have proposed ap-
proaches based on watershed.
Nowadays, many segmentation methods exist and
their optimization is a current challenge. We can men-
tion the orientation of approaches to a specific use, in
our case we focus on the segmentation of tree leaves,
or adding initialization tools such as an input stroke
or a distance map. Concerning the segmentation of
tree leaves, research is emerging from the past fif-
teen years. The existing methods are based either on
analysis on white background (Kumar et al., 2012;
Valliammal and Geethalakshmi, 2012), or on the use
of pairs of images in order to apply a background-
extraction process (Neto et al., 2006; Teng et al.,
2011). There is therefore, to our knowledge, no
method of segmentation of tree leaves, offering anal-
ysis on natural background based on a single image.
In order to propose an original method, Cerutti intro-
duced in (Cerutti et al., 2011) the guided active con-
tour method (denoted by GAC), dedicated to the seg-
mentation of tree leaves on natural background. Re-
garding the initialization tools, the use of new tech-
nologies (smartphones, touch screen, ...), allows the
user to interact with the image to provide additional
informations through input stroke. Another optimiza-
tion is based on the use of color distance map allow-
ing to enhance the contours and identify the various
components of the image. The latter can be based
on Gaussian, linear regression, geodesic distance or
local mean for example. We can also cite an ap-
proach based on minimum barrier distance calcula-
tion (Karsnas et al., 2012; Strand et al., 2013). An-
other interactive method for image segmentation is
Smart Paint, which has been developed for segmen-
tation of medical images (Malmberg et al., 2012).
After this introduction, we detail the support and
the tools used for our comparative study in Section
2. Section 3 is dedicated to the overall results, their
interpretations and illustrations. We conclude this pa-
per on the benefits of the pre-processing tools in the
context of a tree-leaves segmentation.
2 BENCHMARK
Our comparative study is based on the tree
leaves database presented in Grand-Brochier (Grand-
Brochier et al., 2013). Illustrated in Figure 1, this
database is composed of 232 images (from smart-
phones) of tree leaves with ground truth. They are
simple or palmately lobed leaves on plain or natural
background.
Figure 1: Sample images from the database.
To quantify the segmentation (quality, precision,
information extracted, ...), we opt for the analysis
of six observation criteria: The Dice index (or F-
measure) that characterizes the overall quality of the
segmentation area. Based on statistical tests of true
or false positives (respectivily denoted by TP and FP)
and true or false negatives (respectivily denoted by
TN and FN), the Dice index is defined by:
Dice index = 2.0 ×
T P
T P+T N
×
T P
T P+FN
T P
T P+T N
+
T P
T P+FN
;
using these tests, Manhattan (or Matching) index al-
lows to study the similarity rate of the entire image,
and is defined by:
Manhattan index =
T P + FP
T P + FP + T N + FN
.
We also study: the Hamming measure that calculates
the number of disparities between two images; the
Hausdorff distance which can be defined by the max-
imum gap (in pixels) between two segmentations; the
mean absolute distance (denoted by MAD) that ana-
lyzes contour points therefore the shape of the seg-
mentation; and the structural similarity (denoted by
SSIM (Wang et al., 2004)) for the structural informa-
tion extracted.
To highlight the influence of pre-processing tools
on segmentation methods, we have chosen to compare
ten methods, referenced in Table 1. Our study is based
on : a method by Thresholding, a Watershed, two
Snakes including one using B-Splines, two versions
of MeanShift, a Graphcut, a Grabcut, Felzenswalb’s
and GAC’s algorithms. We have chosen two types of
improvement: the use of three color distance maps
and the manual initialization.
2.1 Color Distance Maps
The use of the color distance map allows the user to
enhance the contrast and therefore the contours. This
process is based on two assumptions: the object is in
the center of the image and the background is in the
corners. They are characterized by five seedpoints re-
spectively one for the center and four for the corners.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
508
The principle will be to study the colors and varia-
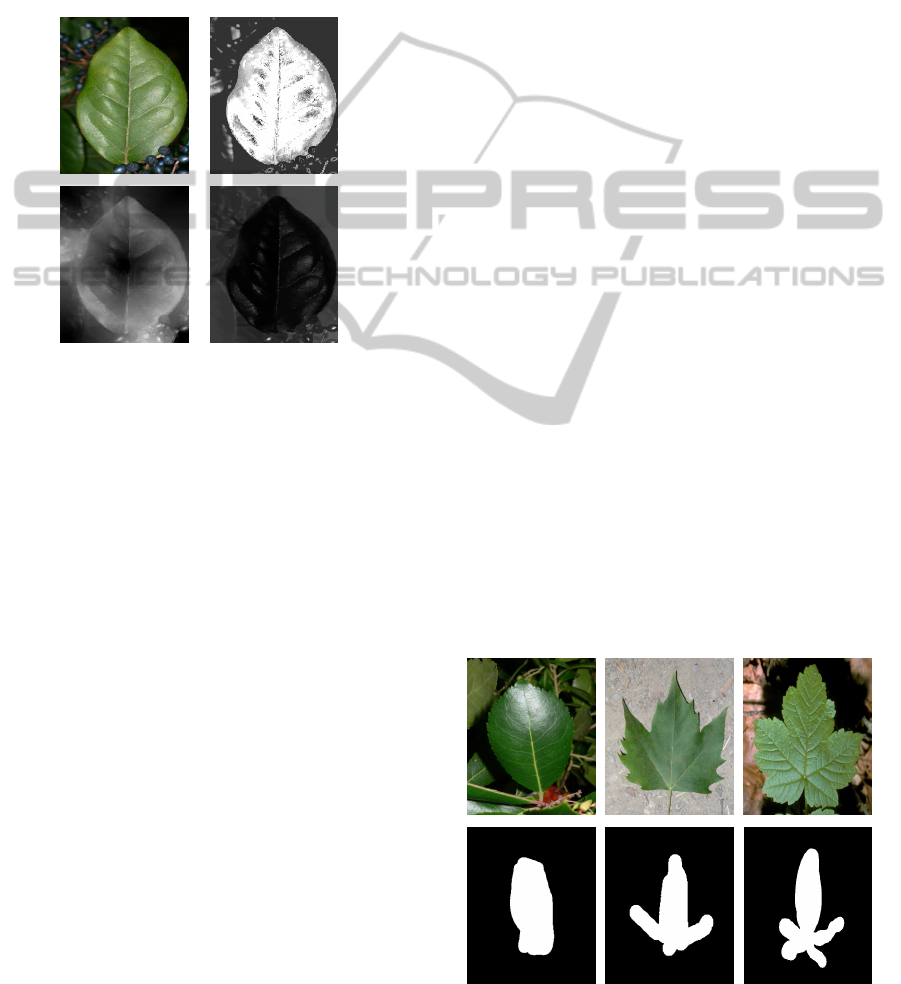
tions around these points. Figure 2 shows three types
of distance map: the first based on coupling global
distance and local color (Cerutti et al., 2011) (denoted
by GD/LC), only using one seedpoint (in the center);
the second based on a geodesic distance (denoted by
GD), using the five seedpoints; and the last one based
on an approach of minimum barrier distance (Karsnas
et al., 2012; Strand et al., 2013) (denoted by MBD),
using a single seedpoint.
Figure 2: Sample of color distance maps: (top: left to right)
initial image, coupling global distance/local color, (bottom:
left to right) geodesic distance, minimum barrier distance.
The tool proposed by G. Cerutti (Cerutti et al., 2012)
is based on modeling the local color, defined by a
distribution of a set of Gaussian. The color distance
map is therefore based on a model of global linear re-
gression, on a local adaptative mean color and on an
evidence-based combination. The dissimilarity map
is defined by the distance of every pixel x in the im-
age to the color model:
d
LinReg
(x) = k(L
x
,a
x
,b
x
) − (L
x
,
ˆ
a(L
x
),
ˆ
b(L
x
))k
2
,
in the L*a*b colorspace. The local adaptative mean
color is based on the analysis of the 8 nearest neigh-
bours (denoted by N
8
) of pixel x and is defined by:
∀y ∈ N
8
(x),A =
αB + (1 − α)C, if kB −Ck
2
< θ
C, otherwise
,
with A = (
¯
L
y
,
¯
a
y
,
¯
b
y
), B = (L
x
,a
x
,b
x
) and
C = (
¯
L
x
,
¯
a
x
,
¯
b
x
). The final map is based on the
combination of the elements detailed above, ac-
cording to the theory of evidence defined by Shafer
(Shaf76).
The two over color distance maps are defined
on subsets space of the image points. The principle
lies in estimating the shortest distance between a
point of the object to be extracted and the back-
ground. In (Strand et al., 2013), the barrier cost
function of a path is the difference of the maximum
and minimum intensity along the path. The minimum
barrier distance between two points is defined by
the barrier cost of the cheapest path with between
the points. In (Karsnas et al., 2012), the vectorial
minimum barrier distance (MBD) was introduced.
This is a method that can be used to compute distance
transforms on color images. The cost of a path π
is given by a path-cost function C ( f ,π). Let Π be
the set of all paths between p and q in (Z
n
,α). The
path-cost distance between p and q is
ρ
A
(p, q) = min
π∈Π
C ( f , π) .
The minimum barrier distance as defined in (Strand et
al., 2013) is obtained by setting
C ( f , π) =
max
i
[ f (p
i
)] − min
j
[ f (p
j
)]
.
With the notation
~
f = ( f
1
, f
2
, f
3
) for RGB-values, we
used the following path-cost function for color im-
ages:
C
~
f , π
=
m
∑
k=1
max
i, j
f
k
(p
i
) − f
k
(p
j
)
.
Note that this path cost function corresponds to the L
1
diameter in RGB-space of the points in the path. See
(Karsnas et al., 2012) for details.
2.2 Input Stroke
For methods permitting it, we propose to add a man-
ual stroke done with the smartphone interaction. This
input stroke, illustrated in Figure 3, allows the user
to locate the leaf in the image and to extract the local
color.
Figure 3: Sample images of tree leaves and their respective
input stroke.
AbouttheImpactofPre-processingToolsonSegmentationMethods-AppliedforTreeLeavesExtraction
509
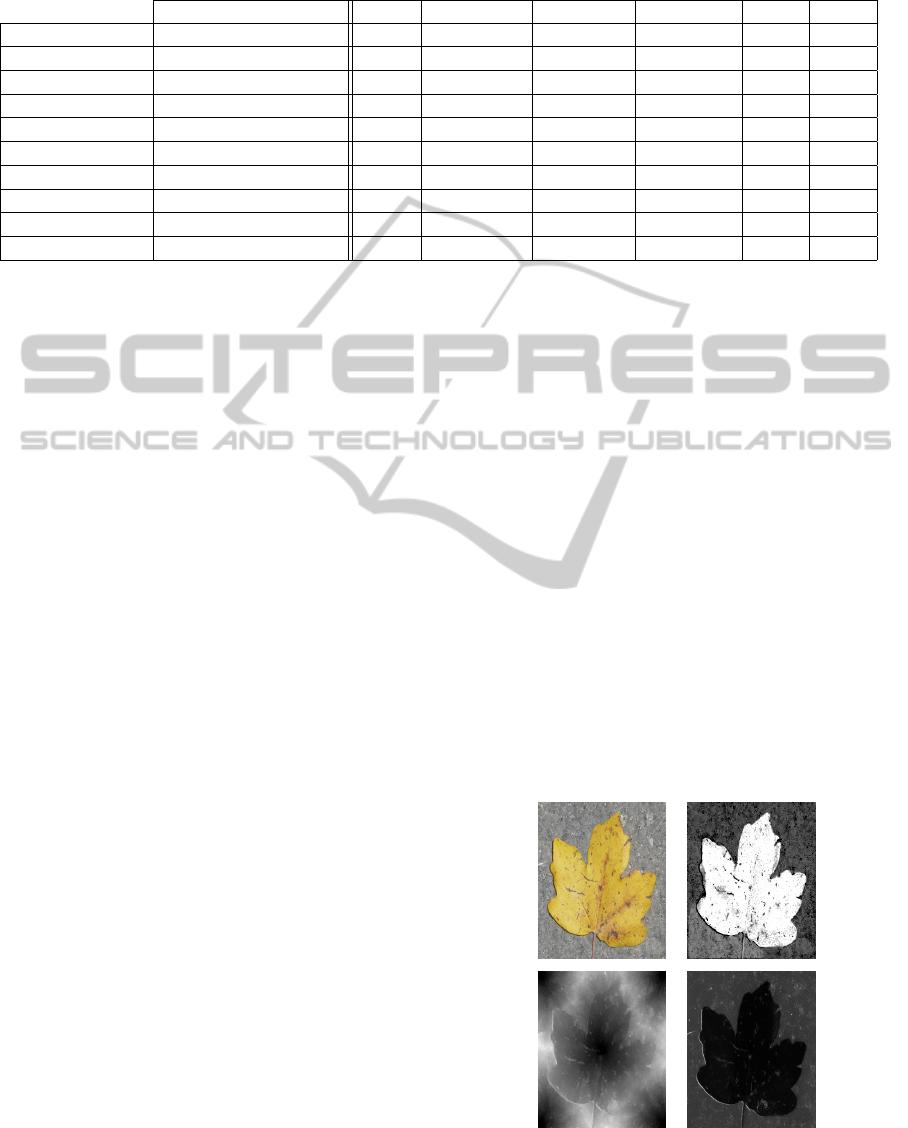
Table 1: Average Dice index, Manhattan index, Hamming measure, Hausdorff distance, MAD and SSIM of 232 images. Ten
segmentation methods are presented, with NO input stroke and with NO color distance map.
ref. Dice Manhattan Hamming Hausdorff MAD SSIM
Thresholding (Otsu, 1979) 0.751 81.27% 12969.5 80.15 6.69 0.67
MeanShift (Cheng, 1995) 0.759 81.23% 12624.8 76.57 6.31 0.70
Pyr. MeanShift (Cheng, 1995) 0.763 81.05% 13021.5 67.38 5.77 0.73
Graphcut (Boykov, 2001) 0.727 78.91% 14435.8 81.29 6.81 0.63
Watershed (Beucher, 1993) 0.749 80.14% 13594.8 74.93 6.13 0.70
Snakes (Chan, 2001) 0.735 80.43% 13060.2 80.31 5.98 0.66
B-splines Snake (Brigger, 2000) 0.809 86.70% 8692 34.3 4.20 0.77
Grabcut (Rother, 2004) 0.876 90.78% 6425.6 41.56 7.16 0.77
Felzenszwalb (Felzenszwalb, 2004) 0.686 81.80% 12474.4 38.6 4.37 0.77
GAC (Cerutti, 2011) 0.881 91.78% 4215.3 15.44 2.39 0.81
This mark also allows algorithm to have an a pri-
ori knowledge on the number of lobes composing the
leaf (simple or palmately lobed).
3 RESULTS AND DISCUSSION
In this paper, we propose to study successively the
performance of segmentation methods, without pre-
processing, then with a distance map, of which we
present optimizations, and finally with the addition
of a manual initialization. The number of results is
quite substancial, so we opt for a comparative analy-
sis based on mean values obtained by each approach
on the 232 images. For methods using thresholds or
adjustable parameters, we present in this paper the
best results obtained after optimization of these ap-
proaches with a collection of images.
3.1 With no Initialization and with no
Color Distance Map
First, we present in Table 1, the performance ob-
tained by each segmentation methods without prepro-
cessing tools. We see a very clear superiority of the
Guided Active Contour approach, for the problem of
tree leaves segmentation. Indeed, quality of segmen-
tation (given by the Dice index) is increased by 12%.
The Manhattan index, characterizing the problems
of sub- and over-segmentation, is also improved by
nearly 8%. The Hamming measure confirms the pre-
vious observations, since the average number of dis-
similarities is divided by 2.5. The Hausdorff distance
provides precision on dispersion of the segmented re-
gions. Indeed, guided active contour shows an aver-
age value equal to 15.44 pixels while the conventional
methods get much higher values. The two last crite-
ria (MAD and SSIM) are used to analyse the shape of
the segmentation as well as the quality of information
extracted according to the ground truth, through struc-
tural analysis. GAC method improves the shape of the
segmentation by a factor 3, and the structural aspect
is increased by 8% compared to the other approaches.
3.2 With no Initialization and with
Color Distance Map
The idea is to replace the original images with more
contrast images to facilitate and improve the segmen-
tation. The results presented in Tables 2,3 and 4 are
based on three types of color distance maps. The first
observation concerns the performance offered by the
methods for each of the color distance maps. Indeed,
for a problem of segmentation of tree leaves, it ap-
pears that the use of a coupling global distance and lo-
cal color provides the best results. This observation is
confirmed by Figure 4, which shows the limits of the
other two colors distance map algoritms in the case of
natural background. The second observation relates
to the improvement in term of performance given to
Figure 4: Color distance maps: (top: left to right) initial
image, coupling global distance/local color, (bottom: left to
right) geodesic distance, minimum barrier distance.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
510
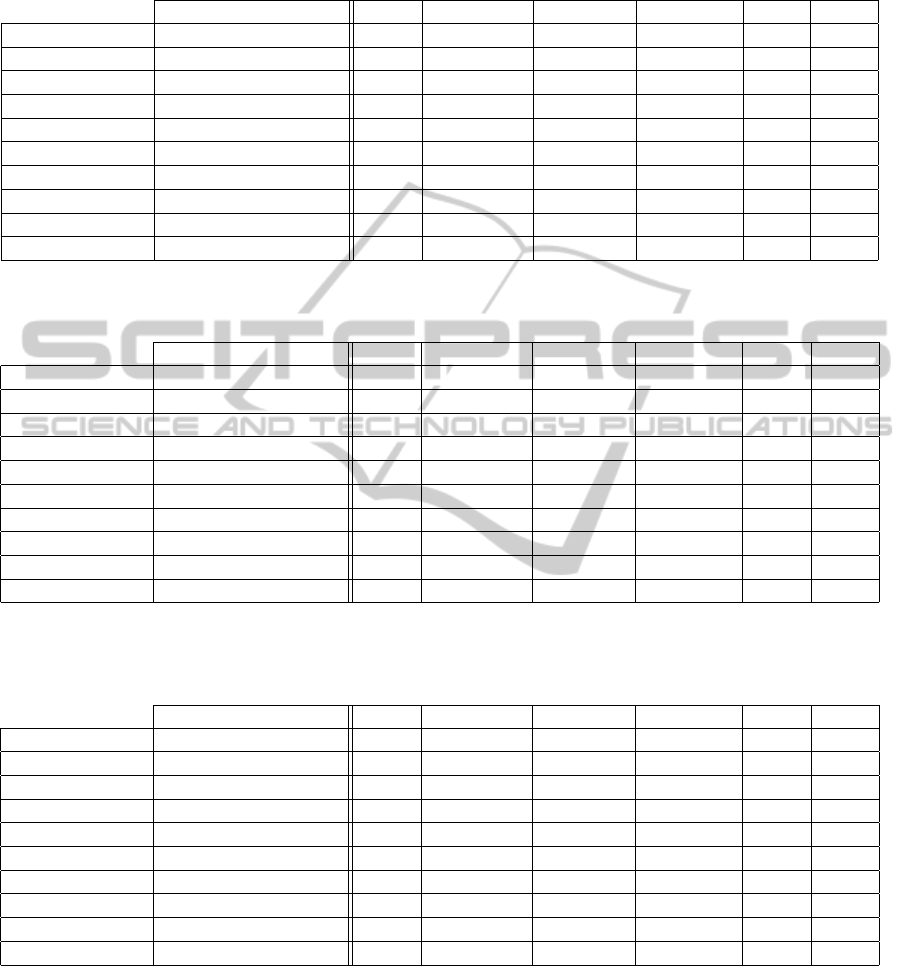
Table 2: Average Dice index, Manhattan index, Hamming measure, Hausdorff distance, MAD and SSIM of 232 images.
Ten segmentation methods are presented, with NO input stroke and with color distance map based on coupling global
distance and local color.
ref. Dice Manhattan Hamming Hausdorff MAD SSIM
Thresholding (Otsu, 1979) 0.855 89.51% 7176.8 48.72 5.87 0.78
MeanShift (Cheng, 1995) 0.816 86.35% 9980.1 61.42 5.56 0.72
Pyr. MeanShift (Cheng, 1995) 0.846 88.33% 8055.5 51.08 5.11 0.78
Graphcut (Boykov, 2001) 0.79 85.46% 10220.2 63.13 6.09 0.69
Watershed (Beucher, 1993) 0.82 84.93% 11624 62.66 5.35 0.76
Snakes (Chan, 2001) 0.834 87.58% 9251.1 63.57 5.24 0.75
B-splines Snake (Brigger, 2000) 0.864 90.42% 6432.7 30.9 3.78 0.80
Grabcut (Rother, 2004) 0.789 83.52% 9397.5 50.08 6.80 0.72
Felzenszwalb (Felzenszwalb, 2004) 0.793 86.70% 8246.2 34.57 3.81 0.79
GAC (Cerutti, 2011) 0.903 94.06% 3780.9 11.56 1.56 0.86
Table 3: Average Dice index, Manhattan index, Hamming measure, Hausdorff distance, MAD and SSIM of 232 images. Ten
segmentation methods are presented, with NO input stroke and with color distance map based on geodesic distance.
ref. Dice Manhattan Hamming Hausdorff MAD SSIM
Thresholding (Otsu, 1979) 0.653 78.66% 13465.2 41.90 11.32 0.72
MeanShift (Cheng, 1995) 0.647 77.49% 13861.4 42.64 10.49 0.72
Pyr. MeanShift (Cheng, 1995) 0.619 75.19% 14566.1 47.61 11.44 0.71
Graphcut (Boykov, 2001) 0.621 77.72% 13921.5 40.81 12.30 0.69
Watershed (Beucher, 1993) 0.655 77.80% 13649.3 42.97 11.94 0.72
Snakes (Chan, 2001) 0.648 80.07% 12766.1 35.35 13.46 0.73
B-splines Snake (Brigger, 2000) 0.673 67.23% 21863.4 71.34 7.43 0.73
Grabcut (Rother, 2004) 0.639 61.08% 22364.0 64.32 6.87 0.61
Felzenszwalb (Felzenszwalb, 2004) 0.664 64.86% 23621.7 72.55 6.29 0.64
GAC (Cerutti, 2011) 0.788 84.32% 5396.8 17.63 4.28 0.78
Table 4: Average Dice index, Manhattan index, Hamming measure, Hausdorff distance, MAD and SSIM of 232 images. Ten
segmentation methods are presented, with NO input stroke and with color distance map based on minimum barrier
distance.
ref. Dice Manhattan Hamming Hausdorff MAD SSIM
Thresholding (Otsu, 1979) 0.539 55.19% 32052.2 100.36 9.52 0.70
MeanShift (Cheng, 1995) 0.563 56.59% 30082.2 89.57 8.97 0.68
Pyr. MeanShift (Cheng, 1995) 0.560 57.55% 28861.3 88.06 8.68 0.65
Graphcut (Boykov, 2001) 0.54 57.90% 29782.3 96.22 10.34 0.68
Watershed (Beucher, 1993) 0.541 51.91% 35039.5 101 8.40 0.67
Snakes (Chan, 2001) 0.59 72.58% 15137.3 31.19 16.3 0.71
B-splines Snake (Brigger, 2000) 0.561 56.59% 30082.1 89.57 8.97 0.73
Grabcut (Rother, 2004) 0.592 47.21% 36216.4 88.02 10.84 0.50
Felzenszwalb (Felzenszwalb, 2004) 0.627 53.61% 34599.1 87.44 9.07 0.57
GAC (Cerutti, 2011) 0.728 80.44% 8245.2 23.01 6.16 0.77
segmentation approaches. By analyzing Table 2, we
can highlight a significant increase in all observation
criteria. From a general point of view, the results im-
proved by nearly 10%. In the case of Guided Ac-
tive Contour method, we notice 2.5% improvement
for the Dice and Manhattan index. The average num-
ber of dissimilarities (Hamming measure) and Haus-
dorff distance are reduced respectively by 11.5% and
33.6%. The shape of segmentation (MAD) and textu-
ral information extracted (SSIM) were also increased
respectively by 53.2% and 6.5%.
To achieve this performance, different tests were
applied to determine the best possible color dissim-
ilarity. We proposed a comparative analysis of the
distance to the average color based on: a Gaussian,
a linear regression, a local mean and a combination
AbouttheImpactofPre-processingToolsonSegmentationMethods-AppliedforTreeLeavesExtraction
511
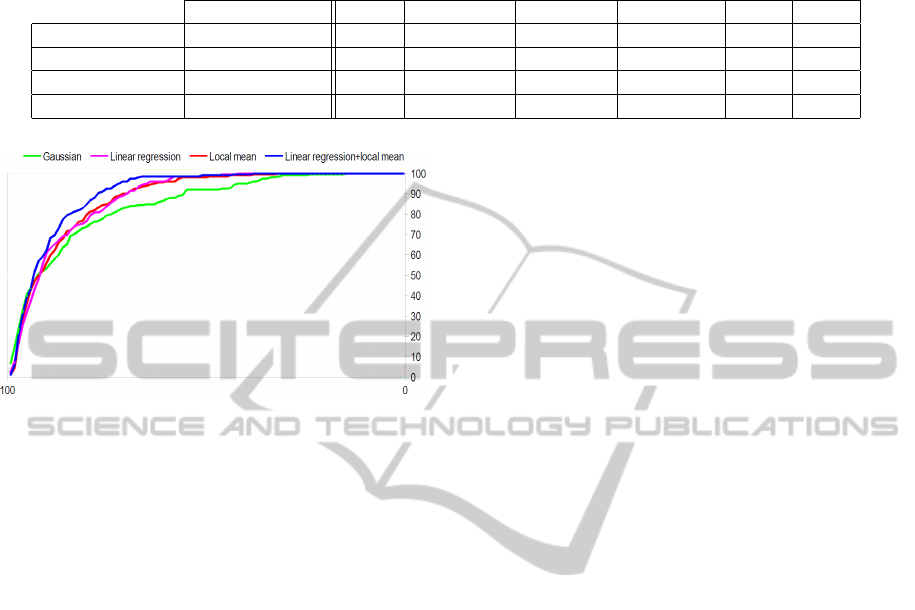
Table 5: Average Dice index, Manhattan index, Hamming measure, Hausdorff distance, MAD and SSIM of 232 images. Four
segmentation methods are presented, with initial trace and with color distance map based on coupling global distance
and local color.
ref. Dice Manhattan Hamming Hausdorff MAD SSIM
Snakes (Chan, 2001) 0.872 91.43% 6094.2 40.92 5.12 0.67
B-splines Snake (Brigger, 2000) 0.861 90.67% 6211.7 29.13 3.45 0.79
Grabcut (Rother, 2004) 0.898 92.46% 4931.5 35.55 6.44 0.85
GAC (Cerutti, 2011) 0.927 95.45% 2872.7 10.82 1.06 0.87
Figure 5: Recovery rate depending on the value of recovery
for four color distance estimations.
of linear regression/local mean. Figure 5 shows a plot
of recovery rate depending on the value of recovery.
Given the results, we therefore opted for color dis-
tance maps based on combination of linear regression
and local mean for all of our tests presented in this
paper.
3.3 With Initialization and with Color
Distance Map
The second improvement is based on the interaction
between the user (via a smartphone for example) and
the algorithm. For methods allowing it (Snakes, B-
splines Snake, Grabcut and Guided Active Contour),
we integrate an initial trace to locate and retrieve the
local color of the leaf. Table 5 presents performances
obtained for the four approaches coupled with an ini-
tial trace. The best of them, the GAC method, has in-
creased its Dice index and Manhattan index by 2.5%.
It has a Dice index greater than 92%, representing
therefore a very good result in terms of precision.
The quality of the segmentation has been improved
through the Hamming measure and the Hausdorff dis-
tance, reduced respectively by 31.6% and 6.8%. The
segmentation area is better defined, the MAD is in-
crease by 47.1%, thus approaching an average offset
of 1 pixel, and the SSIM shows that information ex-
tracted corresponds more to the ground thruth, with a
rate close to 0.9.
3.4 Illustration
To visualize the different improvements achieved
through pre-processing tools, we propose some illus-
tration in Figures 6 and 7. For better clarity, we re-
strict ourselves to one approach with problem of seg-
mentation and one other approach with the best re-
sults. In view of all the results, it appears that the
method developed by Cerutti (Cerutti et al., 2011),
coupled with a distance map based on the coupling
global distance/local color and an initial trace, has
the best performance for almost all images of the
database.
4 CONCLUSIONS
We have presented in this paper a comparative study
of the influence of pre-processing tools on segmenta-
tion methods. Our analysis focuses on the challeng-
ing problems of extracting tree leaves on natural back-
ground. We propose at first the use of color distance
map, in particular the coupling global distance and lo-
cal color, to increase significantly the performance of
all the tested approaches. Subsequently, we added an
initial trace for methods permitting it, relying on tech-
nological developments and user needs. Ultimately,
these tools have enabled us to improve the precision,
shape and quality of the information extracted, in par-
ticular for the Guided Active Contour method. This
method also provides a more stable segmentation, as
we detailed in (Grand-Brochier et al., 2013), through
the study of standard deviations, which are lower for
all observation criteria. These improvements result in
increased computation time, remaining nevertheless
acceptable in relation to the proposed performance:
around 3.5sec per segmentation against 0.09sec for
Thresholding, 1.5sec for Snakes and 60sec for B-
spline snake.
In terms of prospects, we are currently studying
other tools to reduce potential problems of sub- or
over-segmentation. We also wish to study the influ-
ence of the pre-processing tools on the description
and classification steps. We are also considering the
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
512
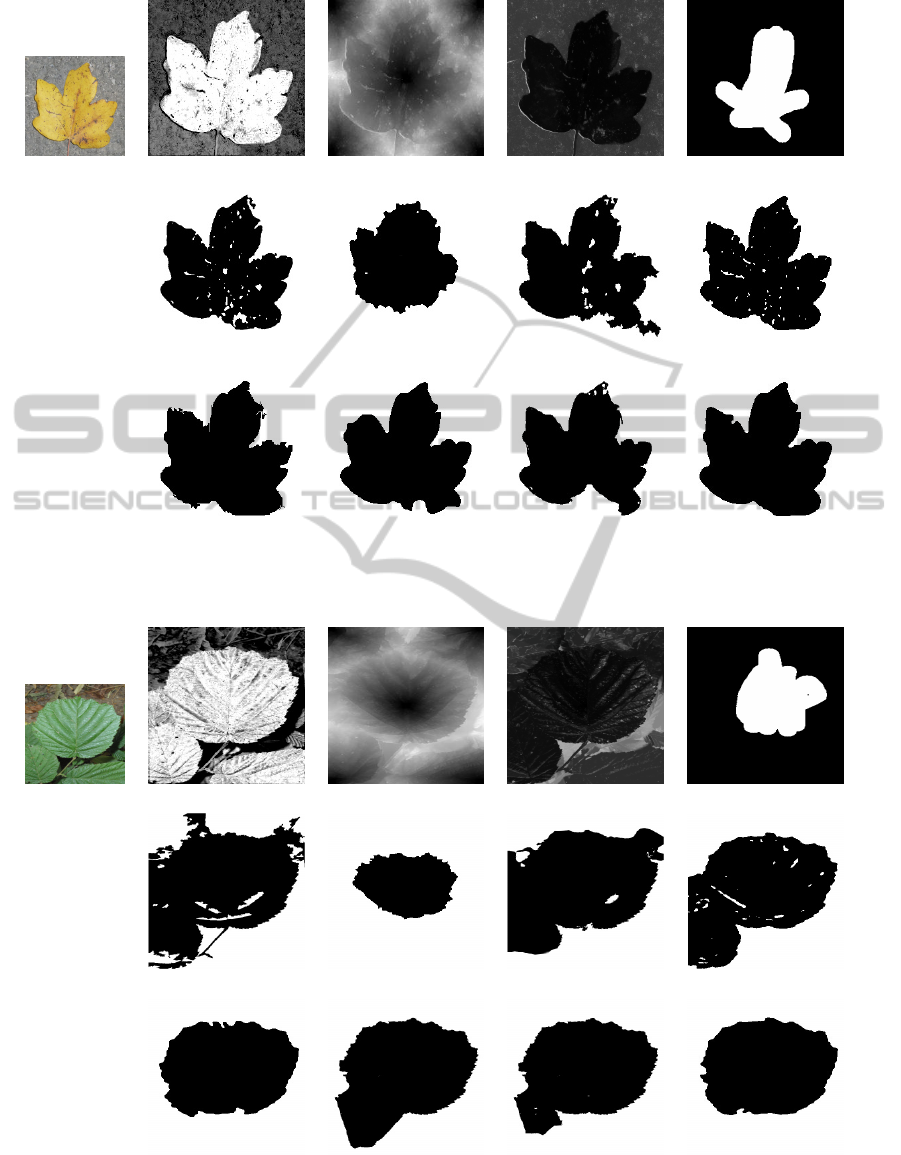
initial image GD/LC GD MBD stroke + GD/LC
B-splines Snakes approach (Dice index (left to right): 0.829, 0.412, 0.618 and 0.871)
Guided Active Contour approach (Dice index (left to right): 0.901, 0.855, 0.820 and 0.948)
Figure 6: Segmentation obtained for distance maps based on (left to right) : coupling Global Distance/Local Color, Geodesic
Distance, Minimum Barrier Distance, and GD/LC with input stroke, for B-splines Snakes and GAC approaches.
initial image GD/LC GD MBD stroke + GD/LC
Grabcut approach (Dice index (left to right): 0.682, 0.479, 0.623 and 0.704)
Guided Active Contour approach (Dice index (left to right): 0.914, 0.813, 0.836 and 0.951)
Figure 7: Segmentation obtained for distance maps based on (left to right) : coupling Global Distance/Local Color, Geodesic
Distance, Minimum Barrier Distance, and GD/LC with input stroke, for Grabcut and GAC approaches.
AbouttheImpactofPre-processingToolsonSegmentationMethods-AppliedforTreeLeavesExtraction
513

implementation of an application bringing together all
this benchmark, in order to use it on any kind of do-
main (medical imaging, object tracking, or any other).
We are currently developing a site for online voting,
to test different methods of segmentation with differ-
ent pre-processing tools and analyze, from a statistical
viewpoint, the results through a panel of 24 observa-
tion criteria.
REFERENCES
Beucher S. and Lantujoul C. (1979). Use of watersheds in
contour detection. REMD.
Beucher S. and Meyer F. (1993). The morphological ap-
proach to segmentation: the watershed transforma-
tion. MMIP, p. 433-481.
Boykov Y. and Jolly M. (2001). Interactive graph cuts for
optimal boundary and region segmentation. ICCV,
vol. 1, p. 105-112.
Brigger P. et al. (2000). B-spline snakes: a exible tool for
parametric contour detection. Trans. on Image Pro-
cessing, vol. 9(9), p. 1484-1496.
Canny J. (1986). A computational approach to edge detec-
tion. PAMI, vol. 8(6), p. 679-698.
Cerutti G. et al. (2011). Guiding Active Contours for Tree
Leaf Segmentation and Identification. CLEF.
Cerutti G. et al. (2012). ReVeS Participation - Tree Species
Classification Using Random Forests and Botanical
Features. CLEF.
Chan T. and Vese L. (2001). Active Contours Without
Edges. Trans. on Image Processing, vol. 10(2), p. 266-
277.
Cheng Y. (1995). Mean Shift, Mode Seeking, and Cluster-
ing. PAMI, vol. 17(8), p. 790-799.
Felzenszwalb P. and Huttenlocher D. (2004). Efficient
Graph-Based Image Segmentation. IJCV, vol. 59(2),
p. 167-181.
Go
¨
eau H. et al.. (2011). The clef 2011 plant images classi-
fication task.
Grand-Brochier M. et al. (2013). Comparative Study of
Segmentation Methods for Tree Leaves Extraction.
VIGTA, vol. 7.
Greig D.et al. (1989). Exact maximum a posteriori estima-
tion for binary images. JRSS, vol. 51, p. 21-279.
Horowitz S. and Pavlidis T. (1974). Picture segmentation by
a directed split and merge procedure. ICPR, p. 424-
433.
Horvath J. (2006). Image segmentation using fuzzy c-
means. SAMI.
Karsnas A. et al. (2012). The vectorial Minimum Barrier
Distance. ICPR, p. 792-795.
Kass M. et al. (1987). Snakes : Active contour model. IJCV,
p. 321-331.
Kumar N. et al. (2012). Leafsnap: a computer vision sys-
tem for automatic plant species identification. ECCV,
2012, p. 502-516.
Kurtz C. et al. (2010). Multiresolution region-based clus-
tering for urban analysis. IJRS, vol. 31(22), p. 5941-
5973.
Lynch M. et al. (2006). Automatic segmentation of the left
ventricle cavity and myocardium in MRI data. CBM,
vol. 36(4), p. 389-407.
Malmberg F. et al. (2012). Smart Paint - A New Interactive
Segmentation Method Applied to MR Prostate Seg-
mentation. MICCAI.
Marr D. and Hildreth E. (1980). Theory of Edge Detection.
Biological Sciences, vol. 207(1167), p. 187-217.
Neto J. et al. (2006). Individual leaf extractions from young
canopy images using Gustafson-Kessel clustering and
a genetic algorithm. CEA, vol. 51(1), p. 66-85.
Otsu N. (1979). A threshold selection method from gray-
level histograms. TSMC, vol. 9(1), p. 62-66.
Rother C. et al. (2004). ”Grabcut”: interactive foreground
extraction using iterated graph cuts. SIGGRAPH, p.
39-314.
Salman N. (2006). Image segmentation based on watershed
and edge detection techniques. IAJIT, vol. 3(2), p.
104-110.
Shafer G. (1976). A Mathematical Theory of Evidence.
Princeton University Press.
Strand R. et al. (2013). The minimum barrier distance.
CVIU, vol. 117(4), p. 429-437.
Teng C. et al. (2011). Leaf segmentation, classification, and
three-dimensional recovery from a few images with
close viewpoints. Opt. Eng., vol. 50(3).
Valliammal N. and Geethalakshmi S. (2012). Plant Leaf
Segmentation Using Non Linear K means Clustering.
IJCSI, vol. 9(1), p. 212-218.
Wang S. and Haralick R. (1984). Automatic multithreshold
selection. CVGIP, vol. 25, p. 46-67.
Wang Z. et al. (2004). Image quality assessment: From
error visibility to structural similarity. TIP, vol. 13(4),
p. 600-612.
Zimm C. et al. (2002). Segmentation and tracking of mi-
grating cells in videomicroscopy with parametric ac-
tive contours: a toll for cell-base drug testing. Medical
Imaging, vol. 21(10), p. 1212-1221.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
514
