
A Hierarchical BCI System Able to Discriminate between Non
Intentional Control State and Four Intentional Control Activities
Julio Abascal, Andoni Arruti, José I. Martín and Javier Muguerza
Department of Computer Architecture and Technology, University of the Basque Country (UPV/EHU)
Manuel de Lardizabal 1, 20018 Donostia, Spain
Keywords: Brain-Computer Interface (BCI), Non Intentional Patterns Detection, Electroencephalogram (EEG),
Clustering, Supervised Learning.
Abstract: This paper presents a two-level hierarchical approach to recognising intentional and non intentional mental
tasks on a brain-computer interface. A clustering process is performed at the first recognition level in order
to differentiate Non intentional Control state (NC) patterns from Intentional Control (IC) patterns. At the
second level, the IC detected patterns are classified by means of supervised learning techniques, applied to
the type of movement (left hand, right hand, tongue or foot imagery movement). The objective is to achieve
high correct movement recognition scores, with a low percentage of wrong decisions (that is, low false
positive rates), to avoid user frustration. Offline evaluation of the proposed prototype shows 84.5%
accuracy, with a 6.7% false positive rate.
1 INTRODUCTION
Brain-Computer Interfaces (BCI) based on
Electroencephalography (EEG) enable users to
command computers just by measuring EEG signals
associated with brain activity (Wolpaw et al., 2002).
This kind of BCI requires a system to identify user
brain activity patterns that are later translated into
commands (Lotte et al., 2007).
Most BCI systems are based on synchronous
protocols where the subject must follow a fixed
repetitive scheme to switch from one mental task to
the next (Pfurtscheller and Neuper, 2001) (Wolpaw
et al., 2002). In synchronous BCI systems, the EEG
phenomena to be recognized are time-locked to
diverse cues. A trial typically lasts from 4 to 10 s or
more. In contrast, in asynchronous BCI systems the
subject makes voluntary, self-paced decisions on
when to stop performing a mental task and when to
start the next one (Nooh, Yunus and Daud, 2011).
Designing an asynchronous BCI system requires
continuous analysis of EEG signals. This analysis
should determine whether the user is in an
Intentional Control (IC) state, that is, if (s)he is
producing one of the brain activity patterns used to
control the BCI, or if (s)he is in a Non Control (NC)
state. Finally, if the user is in an IC state, the system
also has to determine which kind of brain activity
pattern is being produced. Therefore, to deal with
asynchronous problems, it is necessary to be able to
differentiate between known and unknown activity
patterns.
This paper presents the preliminary results of a
study dealing with the problem of classifying
patterns between the different types of IC states after
an NC state discarding process. The approach has a
two level hierarchical structure. The first level
determines whether an activity pattern is present or
not by applying a clustering process. The second
level detects which of four mental tasks (left hand,
right hand, tongue and foot imaginary movements)
has been produced by the user. For this level a
supervised classifier based on Support Vector
Machine paradigm is proposed.
The remainder of the paper is organized as
follows. Section 2 explains the experimental
protocol used, the data acquisition process and the
pre-processing carried out. Section 3 presents the
proposed system to classify the EEG signals into the
four types of imaginary movements considered,
discarding the NC states. Results are presented and
discussed in Sections 4 and 5. Finally, some
conclusions and references are presented.
91
Abascal J., Arruti A., I. Martín J. and Muguerza J..
A Hierarchical BCI System Able to Discriminate between Non Intentional Control State and Four Intentional Control Activities.
DOI: 10.5220/0004723000910097
In Proceedings of the International Conference on Physiological Computing Systems (PhyCS-2014), pages 91-97
ISBN: 978-989-758-006-2
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
2 EXPERIMENTAL PROTOCOL
For our tests, we used the IIIa dataset from the BCI
competition III (Blankertz et al., 2006). It contains
data from 3 subjects: K3b, K6b and L1b, collected
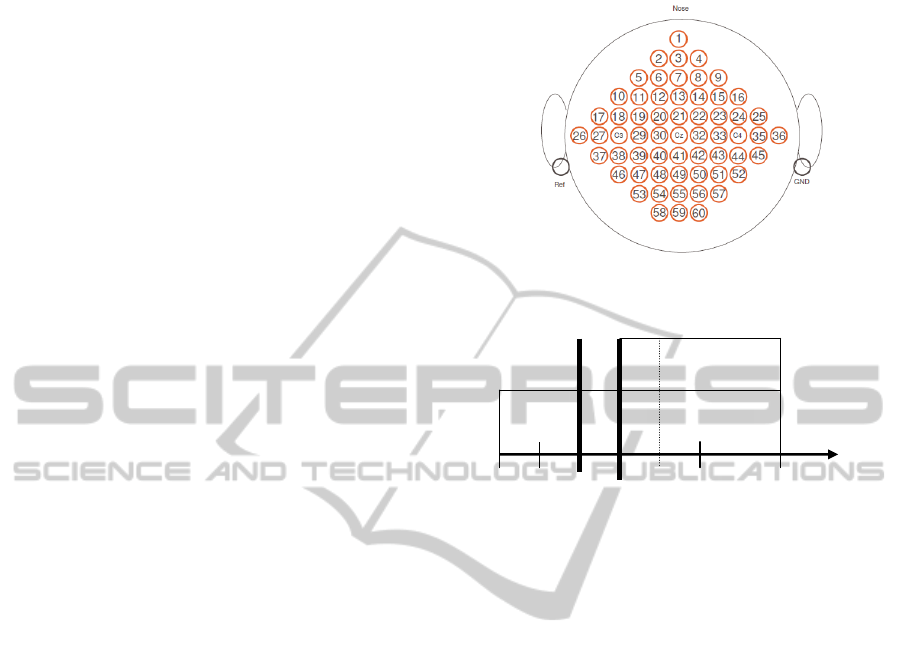
as follows (Schlögl et al, 2005) (see Figure 1). Each
subject, sitting in front of a computer, was asked to
perform imaginary movements of the left hand, right
hand, tongue or foot during a specified time interval
according to a cue. The order of cues was random.
60 electrodes were placed on the subject's scalp
recording a signal sampled at 250 Hz and filtered
between 1 and 50 Hz using a Notch filter. Each trial
started with a blank screen. At t = 2s, a beep was
generated and a cross “+” was shown to attract the
subject's attention. At t = 3s an arrow pointing to the
left, right, up or down was shown for 1s and the
subject was asked to try one of four imaginary
movements until the cross disappeared at t = 7s. This
was followed by a 2s break, and then the next trial
began. The dataset contains 360 instances (cases) for
subject K3b, 240 for K6b and 240 for L1b. Each
instance was labelled as belonging to one of the four
classes. Each dataset contains a balanced distribution
of the classes.
Comparing the subjects shows that K3b presents
the highest accuracy and K6b the lowest (Lee et al.,
2005). This is attributed to the different amount of
BCI training received by the subjects. K3b was the
most experienced, L1b had less experience and K6b
was a beginner. In this work, we have used the data
corresponding to subjects with extreme skills: K3b
and K6b.
This dataset was designed for a synchronous BCI
system, where the subject is aware of the time period
to imagine the proposed activity. Therefore, this data
was collected while the subjects were performing a
cue-based (synchronized) task. A summary of the
results obtained in this synchronous data logging
exercise can be seen in (AlZoubi, Koprinska and
Calvo, 2008).
In this paper, we extended this experimental data
by adding data associated to NC states to the dataset.
We associated the first three seconds (t = 0-3s) of
each trial with no intentional activity. Therefore, for
subject K3b we get 720 instances: 360 instances that
indicate one of the four different intentional
activities (IC state), corresponding to processing 4-7
seconds of each trial, and another 360 instances with
non intentional brain activity (a new class: NC
state), corresponding to the data obtained from 0-3
seconds of each trial. We processed the data from
subject K6b in the same way, and we obtained 480
instances: 240 instances of intentional activity and
240 instances of non intentional activity.
(a)
Arrow +
Fixation cross
Training
Fixation cross
0 1 2 3 4 5 6 7
time (s)
Blank
screen
Beep
Fixation cross
(b)
Figure 1: (a) EEG electrode placement, and (b) data
acquisition paradigm (BCI Competition III).
We applied the same pre-processing techniques
applied by AlZoubi et al. in (AlZoubi, Koprinska
and Calvo, 2008). Firstly, we applied the Common
Spatial Patterns (CSP) method (Müller-Gerking,
Pfurtscheller and Flyvbjerg, 1999) to the raw EEG
data. The result of applying CSP to the original 60
signals is a new set of 60 signals sorted by their
ability to predict class. We selected the first 5
projections, and then we applied 3 frequency band
filters (for 8-12 Hz, 21-20 Hz and 20-30 Hz).
Finally, we extracted 7 features: max, min and mean
voltage values, voltage range, number of samples
above zero volts, zero voltage crossing rate and
average signal power. This process gives 525
[5x5x3x7] (5 classes, 5 projections, 3 filters and 7
features) discrete numeric values for each case of the
dataset.
After pre-processing the data corresponding to
each subject, we split all the data into three sets: a
training dataset for the clustering process at the first
level (to detect the IC states), another training
dataset for learning a supervised classifier at the
second level (to distinguish between the four types
of mental tasks) and a test dataset for evaluating the
system's performance. Therefore, we created three
datasets randomly for each subject, containing 240
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
92
cases for subject K3b (120 correspond to NC state
and 120 to IC state, namely 30 cases for each
imaginary movement), and 160 cases (80 for NC
state and 80 for IC state: 20 cases for each imaginary
movement) for subject Kb6.
One of the most important problems in machine
learning is the need to deal with high numbers of
dimensions. This problem is known as the curse of
dimensionality: small numbers of training instances
but highly dimensional. In these cases, it is
necessary to simplify the learning algorithm by
reducing the dimensionality before starting the
learning process. This can be done by selecting the
problem's most informative features and discarding
the most irrelevant and redundant features. In this
work we applied the Correlation-Based Feature
Selection (CFS) method (Hall, 2000) which is the
same feature selection method used by AlZoubi et
al. in (AlZoubi, Koprinska and Calvo, 2008). This
method bases its selection on searching for features
that are highly correlated with a specific class
variable and least correlated with the other variables.
We used the implementation provided by Weka
data-mining platform (Witten and Frank, 2005). We
used the best first (greedy) search option starting
with an empty set of features and adding new
features. It is important to note that feature selection
was only performed using training data, and test data
was not used in any way during feature selection. As
a result, 45 and 40 features were selected for K3b
and K6b, respectively.
3 PROPOSED HIERARCHICAL
SYSTEM: TRAINING PHASE
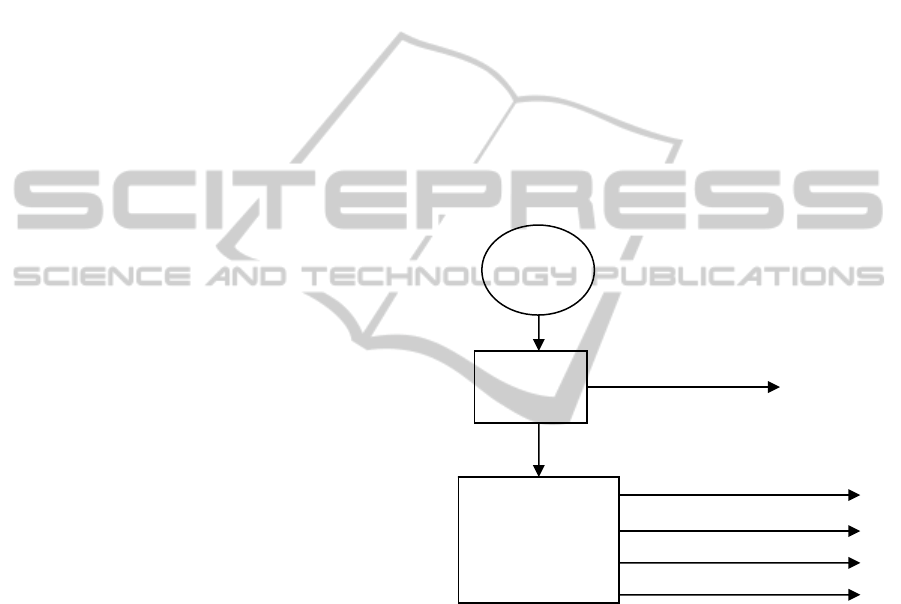
As mentioned in the Introduction, the system
proposed in this work has a hierarchical structure
that can be seen in Figure 2. The first level
determines the presence or absence of intentional
activity in the EEG signal, applying clustering
techniques. The second level determines whether the
detected intentional activity is a left hand, right
hand, tongue or foot imaginary movement.
3.1 First Level: Detecting IC Activity
We used the K-means algorithm (Weka
implementation) with the Euclidean distance for the
first level of the system. One key issue in this phase
is how good the system is at rejecting the NC state.
Hence, to design this level we transformed the five-
class dataset into a two-class dataset.
It is critical to minimize the False Positive Rate
of the NC class (FPR = FP / (FP+TN)). FPR
depends on False Positives (FP, acceptance of an NC
state as an IC state) and on True Negatives (TN,
rejection of a true NC state). A high FPR tends to
cause excessive user frustration making the resulting
BCI unusable (e.g. if the system is used to control a
wheelchair, an FP would imply undesirable chair
movements implying high risk for the user).
According to the literature, we have selected a
maximum threshold of 10% for the system's first
level FPR. This value is similar to the FPR used in
(Lotte, Mouchère and Lécuyer, 2008) (Scherer et al.,
2008). After the clustering process, each cluster is
labelled as belonging to one of the two classes, NC
or IC, taking into account that the FPR (for the NC
class) must be less than the selected threshold
(10%). This has been done by establishing a
minimum number of IC class patterns for the
generated clusters (IC-threshold) to be labelled as an
IC cluster.
Figure 2: Structure of the proposed BCI system.
Therefore, for this first stage of the system, we had
to select the IC-threshold and the K value for the K-
means algorithm. We analysed 10 different values
for the parameter K: 5, 10, 15, 20, 25, 30, 35, 40, 45
and 50. This estimation was made by applying a 10-
fold cross-validation methodology using the first set
of training data with patterns from the two-class
system: NC state and IC state (grouping all patterns
of each imaginary movement). Only clusters
exceeding the IC-threshold were labelled as IC class.
We calculated the nearest cluster for each unused
pattern of the cross-validation fold using average
linkage distance. As shown in Table 1, to maintain
the FPR level under 10%, a 70% IC-threshold was
necessary. The best results were obtained with K =
Electrode
array
clustering
NC state: no movement
supervised
classification
IC state
IC state 1: left hand movement
IC state 2: ri
g
ht hand movement
IC state 3: ton
g
ue movement
IC state 4: foot movement
AHierarchicalBCISystemAbletoDiscriminatebetweenNonIntentionalControlStateandFourIntentionalControl
Activities
93

Table 1: FPR (NC class) and accuracy (10-CV) depending on the value of the K parameter and the IC-threshold. Grey
shading for FPR under 10%, * shows the highest accuracy, and bold highlights the best option for each subject.
IC-
threshold
10-CV
K value
5 10 15 20 25 30 35 40 45 50
90%
K3b
FPR (%) 0.0 5.8 6.7 4.2 6.7 4.2 5 5.8 4.2 5.8
Accuracy (%) 51.7 62.1 62.9 65.8 65 70 70.8 67.1 72.1* 70.8
K6b FPR (%) 0.0 6.3 5.0 5.0 8.8 7.5 10.0 13.8 13.8 13.8
Accuracy (%) 50.0 56.9 63.8 70.0* 64.4 61.3 59.4 63.8 66.3 66.9
80%
K3b FPR (%) 10.8 12.5 10.0 8.3 10 8.3 8.3 8.3 6.7 10
Accuracy (%) 74.6 75.0 74.6 77.9 72.9 80.4 79.2 79.2 81.3* 82.9
K6b FPR (%) 7.5 11.3 6.3 6.3 10.0 12.5 12.5 18.8 16.3 16.3
Accuracy (%) 67.5 68.8 73.8* 73.8* 72.5 70.0 68.1 73.1 73.1 73.8
70%
K3b FPR (%) 10.8 12.5 10.8 11.7 15.8 8.3 10.8 13.3 12.5 13.3
Accuracy (%) 75.4 79.6 75.4 80.0 76.3 83.8 80.4 79.2 80.4 81.3
K6b FPR (%) 15.0 16.3 7.5 11.3 16.3 13.8 13.8 20.0 16.3 16.3
Accuracy (%) 78.1 76.3 77.5 76.3 74.4 76.9 70.0 73.8 731 73.8
60%
K3b FPR (%) 15.8 19.2 10.8 14.2 19.2 15.8 18.3 20.0 15.8 19.2
Accuracy (%) 75.8 79.6 76.7 82.5 79.2 83.3 80.0 78.8 81.7 82.1
K6b FPR (%) 18.8 17.5 10.0 13.8 20.0 18.8 22.5 20.0 20.0 20.0
Accuracy (%) 81.9 79.4 80.0 78.1 75.0 80.0 75.0 75.6 76.3 74.4
Table 2: Accuracy (10-CV) of the classifiers.
10-CV
Accuracy (%)
1R DT 1-NN 5-NN NB RBF SVM LR AdaB Bag RF
K3b 45.8 60.8 77.5 82.5 80.8 77.5 84.2 74.2 72.5 74.2 77.5
K6b 31.3 58.8 53.8 58.8 60.0 63.8 65.0 53.8 62.5 56.3 56.3
30 for subject Kb3, and K = 15 for subject K6b. For
these K values, the FPR (NC class) was 8.3% and
7.5%, respectively.
3.2 Second Level: Classifying the Type
of Imaginary Movement
We used supervised learning algorithms to
implement this level. From the great variety of
algorithms that have been applied in BCI systems
(Lotte et al., 2007), we selected 11 algorithms: 1R
rule, Decision Tree (DT), k-NN (1-NN and 5-NN),
Naive Bayes (NB), Radial-bases Network (RBF),
Support Vector Machine (SVM), Logistic
Regression (LR), Ada Boost (AdaB, combining 10
decision trees), Bagging (Bag, combining 10
decision trees) and Random Forest (RF). We chose
these algorithms because they represent different
paradigms (rule-based, tree-based, distance-based,
probabilistic, function-based, ensemble of
classifiers) and they are state of the art in data
mining. We use their Weka (Witten and Frank,
2005) implementation by applying the default values
for the parameters.
All classifiers were trained using the second
training set (120 cases, 30 cases of each imagery
mental task). The best algorithm was estimated by
applying a 10-fold cross-validation methodology.
Table 2 shows the accuracy achieved by each
classifier for both subjects. The best overall
classifier was the SVM algorithm with an accuracy
of 84.2% for subject K3b and 65.0% for subject
K6b.
Summarizing, the proposed hierarchical BCI
system consists of a first level that differentiates
between NC and IC states, based on clustering
techniques; and a second level, based on a SVM
classifier, that discriminates between the four types
of mental tasks considered. The optimal number of
first level clusters is different for each subject: 30 for
subject K3b and 15 for subject K6b.
4 EXPERIMENTAL RESULTS:
EXPLOITATION PHASE
Once the system has been trained, it can be used for
classifying new EEG patterns, so far unknown to the
system. The newly-designed system's performance
was tested using the test dataset. As previously
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
94
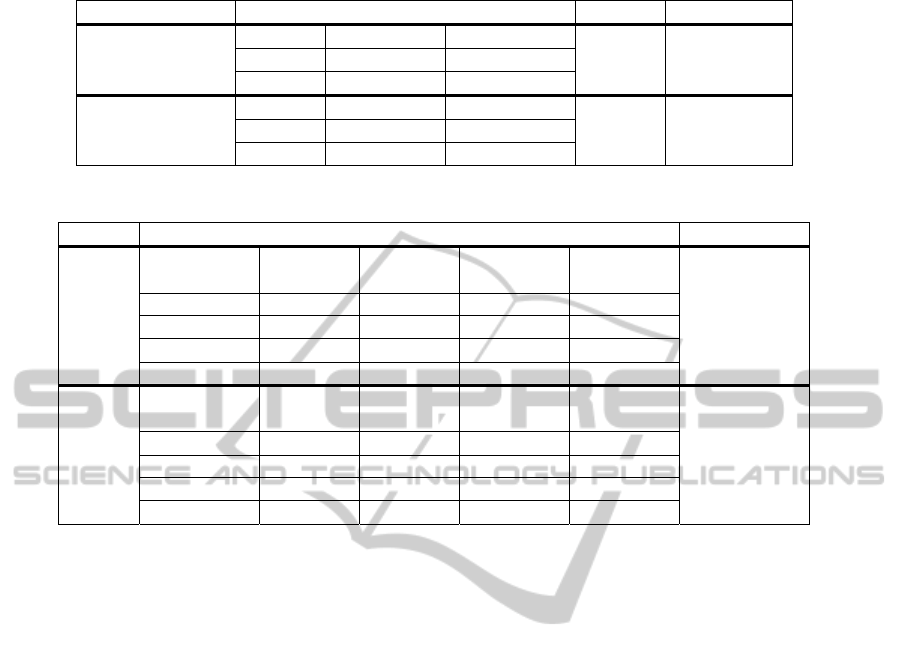
Table 3: Classification performance for the first level using the test dataset.
Confusion Matrix FPR (%) Accuracy (%)
K3b
(K-means, K=30)
IC-estimated NC-estimated
6.7
81.7
IC-real 84 36
NC-real 8 112
K6b
(K-means, K=15)
IC-estimated NC-estimated
2.5
80.0
IC-real 50 30
NC-real 2 78
Table 4: Classification performance for the second level with the test dataset.
Confusion Matrix Accuracy (%)
K3b
(SVM)
Left-
estimated
Right-
estimated
Tongue-
estimated
Foot-
estimated
84.5
Left-real 6 7 0 2
Right-real 2 26 0 0
Tongue-real 1 0 18 1
Foot-real 0 0 0 21
K6b
(SVM)
Left-
estimated
Right-
estimated
Tongue-
estimated
Foot-
estimated
64.0
Left-real 2 9 0 0
Right-real 1 11 1 0
Tongue-real 3 3 1 0
Foot-real 0 0 1 18
explained, the test set for subject K3b comprises 240
cases (120 corresponding to NC state and 120 cases
for IC state), while the test set for subject K6b
consists of 160 cases (80 of each state). Considering
only the IC patterns, subject K3b's test set consists
of 30 cases of each of the 4 types of mental tasks,
whereas, subject K6b's test set consists of 20 cases
of each type of movement.
Table 3 summarizes the results obtained for the
first level of the system when the new patterns were
processed. This table shows the confusion matrix
obtained, as well as the FPR (NC class) and the
accuracy of this first level. There are 8 cases of NC
patterns misclassified into clusters labelled with
some kind of movement (i.e. intentional activity)
leading to 6.7% FPR (NC class) for subject K3b. 84
cases (from the initial 120) corresponding to activity
patterns (IC state) will be classified in the second
level of the system. On the other hand, they are only
2 cases of misclassified NC patterns; yielding a
2.5% FPR for subject K6b, 50 cases (from the initial
80) correspond to activity patterns.
Table 4 shows the confusion matrix for the
second level of the system. The patterns are
classified in the 4 possible imaginary movements
(right, left, tongue, foot) using a Support Vector
Machine (SVM) classifier. The accuracies obtained
from the two subjects are 84.5% and 64.0%,
respectively.
Analysing the confusion matrix shows that it is
more difficult for both subjects to detect the left
hand movement. The number of patterns reaching
the second level of the system for this movement is
clearly lower than for all other movements, and,
there is a bias in the system that classifies these
patterns as belonging to the right imaginary
movement. In general, subject K6b obtained worse
results and presented specific difficulties with the
tongue movement (only 7 patterns reached the
second level, and, only one was correctly classified).
Analysing the overall system's performance in
terms of classifying the five different patterns (NC
class + 4 imaginary movements), the accuracy for
subject K3b is 76.3% and 68.8% for the other
subject. The differences in results obtained for each
subject confirmed the description of subject K6b as
a less trained (beginner) user, and, as a consequence,
the system had greater difficulty dealing with this
subject's EEG patterns.
Although it is difficult to compare the results
obtained with other works, mainly because we have
included a class for the Non Intentional Control
state, we can say that the results obtained are similar
to the work presented by AlZoubi et al. in (AlZoubi,
Koprinska and Calvo, 2008). They obtained a 78.5%
average result for both subjects, whereas in our case
the accuracy was 72.6% (taking into account the
difficulty of introducing the NC class).
AHierarchicalBCISystemAbletoDiscriminatebetweenNonIntentionalControlStateandFourIntentionalControl
Activities
95

Table 5: Accuracy (10-CV) of the classifiers (one-level system).
10-CV
Accuracy (%)
1R DT 1-NN 5-NN NB RBF SVM LR AdaB Bag RF
K3b 40.4 63.9 75.8 79.6 75.7 77.1 81.1 69.9 76.0 72.5 73.3
K6b 37.0 50.0 44.0 46.5 52.0 50.5 60.0 47.5 56.0 57.0 56.0
5 COMPARISION WITH AN
ONE-LEVEL SYSTEM
In order to test the validity of the proposed
hierarchical system, we also implemented a one
level system without the clustering phase. We
analysed the performance of the same classifiers
used in Section 2 to develop the second level
classifier for the five classes (NC, left hand, right
hand, tongue or foot). All the classifiers were now
trained using the two previously defined training
data sets: 300 cases (60 cases of each class) for
subject K3b and 200 cases (40 cases of each class)
for subject K6b. The best algorithm was estimated
again by applying a 10-fold cross-validation
methodology. Table 5 shows the accuracy achieved
by each classifier for both subjects. The best overall
classifier was again the SVM algorithm, with an
accuracy of 81.1% for subject K3b and 60% for
subject K6b.
The system performance was tested with the
same test data set used for the hierarchical proposal:
240 cases for subject K3b and 160 cases for subject
K6b. The obtained accuracy using the SVM
classifier was lower than the one obtained with the
two-level system: 74.5% for subject K3b and 66.9%
for subject K6b. These results confirm that the two-
level approach has higher performance than the one-
level system.
6 CONCLUSIONS
In this paper we proposed a two-level hierarchical
approach to recognise mental tasks including
intentional and non intentional states on a brain-
computer interface. At the first level, the proposal
performs a clustering process in order to
differentiate patterns of Non intentional Control
state (NC) from patterns of Intentional Control (IC).
At the second level, the IC detected patterns are
classified by movement type (left hand, right hand,
tongue or foot imaginary movement) by a supervised
learning classifier.
After a pre-processing phase and reducing the
number of dimensions of the problem, we applied
the K-means algorithm for the first level of the
system, obtaining the best results with K = 30
(accuracy of 81.7%) and K = 15 (accuracy of 80.0%)
for subjects K3b and K6b, respectively, using BCI
III Competition dataset IIIa. The best results
obtained for the second level were achieved with the
Support Vector Machine classifier with 84.5% and
64.0% overall accuracy, respectively. These results
were obtained maintaining the False Positive Rate
for the NC class under 10% (achieving 6.7% and
2.5% rates for the subjects participating in the
experiment). The classification phase results
encourage us to apply Support Vector Machine
based algorithms in the clustering phase.
This work takes advantage of the good results
obtained in synchronous experiments to apply them
in a more realistic but more demanding
asynchronous environment. In the asynchronous
case, the data includes inactivity periods along with
activity states. Our work firstly distinguishes activity
from non-activity status. Once voluntary activity is
found, we detect the type of virtual movement
associated with it. In this way, our research proposes
a step forward towards practical asynchronous
detection.
Nevertheless, this work did not deal with the
problem of detecting IC states in a continuous EEG
signal (asynchronous or self-paced BCI). We just
introduced the NC state as a new class. This may
explain why our results are generally better than
presented in other works (Scherer et al., 2008) (Satti,
Coyle and Prasad, 2009). We plan to apply our
proposal to the asynchronous BCI problem in order
to be able to compare both approaches.
ACKNOWLEDGEMENTS
This work was funded by the University of the
Basque Country (Aldapa, GIU10/02), by the Science
and Education Department of the Spanish
Government (ModelAccess project, TIN2010-
15549), and by the Department of Education,
Universities and Research of the Basque
Government (IT395-10 research group grant).
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
96

REFERENCES
Wolpaw, J., Birbaumer, N., McFarland, D., Pfurtscheller,
G., Vaughan T., 2002. Brain-computer interfaces for
communications and control. Clinical
Neurophysiology, 113 (6): 767-791.
Lotte, F., Confgedo, M., Lécuyer, A., Lamarche, F.,
Arnaldi, B., 2007. A review of classification
algorithms for eeg-based brain-computer interfaces.
Journal of Neural Engineering, 4:R1-R13.
Pfurtscheller, G., Neuper, C., 2001. Motor imagery and
direct brain-computer communication. Proc. IEEE,
vol. 89, pp.1123-1134.
Nooh, A. A., Yunus, J., Daud, S.M., 2011. A review of
Asynchronous Electroencephalogram-based Brain
Computer Interface Systems. International Conference
on Biomedical Engineering and Technology,
Singapore, vol. 11.
Blankertz, B., Müller, K. R., Krusienski, D., Schalk, G.,
Wolpaw, J. R., Schlögl, A., Pfurtscheller, G., Millan,
J., Schröder, M., Birbaumer, N., 2006. The BCI2000
Competition III: Validating Alternative Approaches to
Actual BCI Problems. IEEE Transactions on Neural
Systems and Rehabilitation Engineering, vol. 14, no.
2, pp. 153-159.
Schlögl, A., Lee, F., Bischof, H., Pfurtscheller, G., 2005.
Characterization of four-class motor imagery EEG
data ffor the BCI competition 2005. Journal of Neural
Engineering, 2: L14-L22.
Lee, F., Sherer, R., Leeb, R., Neuper, C., Bischof, H.,
Pfurtscheller, G., 2005. A Comparative Analysis of
Multi-class EEG Classification for Brain-computer
interface. 10th Computer Vision Winter Workshop
(CVWW). Technical University of Graz, Austria.
AlZoubi, O., Koprinska, I., Calvo, R.A., 2008.
Classification of Brain-computer Interface Data. 7th
Australasian Data Mining Conference (AusDM),
Adelaide (Australia), pp. 123-132.
Müller-Gerking, J., Pfurtscheller, G., Flyvbjerg H., 1999.
Designing optimal spatial filters for single-trial EEG
classification in a movement task. Clinical
Neurophysiology, vol. 110, no. 5, pp. 787-798.
Hall, M., 2000. Correlation-based feature selection for
discrete and numeric class machine learning. 17th
International Conference on Machine Learning
(ICML), 359-366, Morgan Kaufmann.
Witten, L. H., Frank, E., 2005. Data Mining: Practical
Machine Learning Tools and Techniques. Morgan
Kaufmann, San Francisco.
Lotte, F., Mouchère, H., Lécuyer, A., 2008. Pattern
Rejection Strategies for the Design of Self-Paced
EEG-based Brain-Computer Interfaces. 19th
International Conference on Pattern Recognition,
Florida (USA), pp. 1-5.
Scherer, R., Lee, F., Schlögl, A., Leeb, R., Bischof, H.,
Pfurtscheller, G., 2008. Towards self-paced brain-
computer communication: Navigation through virtual
worlds. IEEE Transactions on Biomedical
Engineering, vol. 55, no. 2, pp. 675-682.
Satti, A., Coyle, D., Prasad, G., 2009. Continuous EEG
Classification for a Self-paced BCI. 4th International
IEEE EMBS Conference on Neural Engineering,
Turkey, pp. 315-318.
AHierarchicalBCISystemAbletoDiscriminatebetweenNonIntentionalControlStateandFourIntentionalControl
Activities
97
