
Edge-based Foreground Detection with Higher Order Derivative Local
Binary Patterns for Low-resolution Video Processing
Francis Deboeverie, Gianni Allebosch, Dirk Van Haerenborgh, Peter Veelaert and Wilfried Philips
Department of Telecommunications and Information Processing, Image Processing and Interpretation, UGent/iMinds,
St-Pietersnieuwstraat 41, 9000 Ghent, Belgium.
Keywords:
Foreground Segmentation, Edge Detection, Local Binary Patterns, Low-resolution Video Processing.
Abstract:
Foreground segmentation is an important task in many computer vision applications and a commonly used
approach to separate foreground objects from the background. Extremely low-resolution foreground segmen-
tation, e.g. on video with resolution of 30x30 pixels, requires modifications of traditional high-resolution
methods. In this paper, we adapt a texture-based foreground segmentation algorithm based on Local Binary
Patterns (LBPs) into an edge-based method for low-resolution video processing. The edge information in
the background model is introduced by a novel LBP strategy with higher order derivatives. Therefore, we
propose two new LBP operators. Similar to the gradient operator and the Laplacian operator, the edge infor-
mation is obtained by the magnitudes of First Order Derivative LBPs (FOD-LBPs) and the signs of Second
Order Derivative LBPs (SOD-LBPs). Posterior to background subtraction, foreground corresponds to edges on
moving objects. The method is implemented and tested on low-resolution images produced by monochromatic
smart sensors. In the presence of illumination changes, the edge-based method outperforms texture-based fore-
ground segmentation at low resolutions. In this work, we demonstrate that edge information becomes more
relevant than texture information when the image resolution scales down.
1 INTRODUCTION
Foreground/background segmentation is an essential
pre-processing step, aimed at the separation of mov-
ing objects, the foreground (FG), from an expected
scene, the background (BG). FG/BG segmentation
is often considered in a broader context of, for in-
stance, human activity detection (Gr¨unwedel et al.,
2013). The focus of FG/BG segmentation has drifted
towards higher resolutions, yielding new, high-
performing, algorithms (Zivkovic, 2004; Heikkil¨a
and Pietik¨ainen, 2006; Barnich and Droogenbroeck,
2009; Gr¨uenwedel et al., 2011). However, the price of
processing on high-resolution smart cameras has in-
creased (Camilli and Kleihorst, 2011), which makes
multicamera systems prohibitive for a low price
range. On the contrary, low-resolution image sensors
allow very low-cost processing and can therefore al-
low more sensors at a lower total system cost (Camilli
and Kleihorst, 2011). For instance, low-resolution
imagers have been proven useful in (Hengstler and
Aghajan, 2006). However, existing FG/BG segmen-
tation algorithms need to be adapted for optimal oper-
ation on extremely low-resolution video (e.g. 30x30
pixels), since they can only scale down to resolutions
of about 128x128 pixels (Gr¨unwedel et al., 2011).
An approach that is promising to work at low res-
olutions uses Local Binary Patterns (LBPs) (Ojala
et al., 1996; Ojala et al., 2002). The LBP opera-
tor describes each pixel by the relative grey levels of
its neighbouring pixels. The binary patterns or their
statistics, most commonly the histogram, are then
used for further image analysis. In this sense, the BG
subtraction technique in (Heikkil¨a and Pietik¨ainen,
2006) is a region-based method describing local tex-
ture characteristics as a modification of the LBPs
(Ojala et al., 1996). Each pixel is modelled as a group
of adaptive local binary pattern histograms that are
calculated over a circular region around the pixel.
In this paper, we adapt the texture-based FG seg-
mentation algorithm based on LBPs (Heikkil¨a and
Pietik¨ainen, 2006) into an edge-based method for
low-resolution video processing. In the proposed BG
subtraction method, FG corresponds to edges on mov-
ing objects. This idea is based on the concept of de-
tecting FG in video by moving intensity differences in
the human brain (Movshon et al., 1986). The edge in-
formation in the BG model is introduced by a novel
generic strategy with higher order derivative LBPs.
Therefore, we introduce two new LBP operators. Re-
339
Deboeverie F., Allebosch G., Van Haerenborgh D., Veelaert P. and Philips W..
Edge-based Foreground Detection with Higher Order Derivative Local Binary Patterns for Low-resolution Video Processing.
DOI: 10.5220/0004723403390346
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 339-346
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

lated to the gradient edge operator and the Laplacian
edge operator, the key idea is to build a BG model
from the magnitudes of First Order Derivative LBPs
(FOD-LBPs) and the signs of Second Order Deriva-
tive LBPs (SOD-LBPs). Edge detection uses the mag-
nitude of the first derivative to detect the presence of
an edge at a point in an image (i.e., to determine if a
point is on a ramp). Similarly, the sign of the second
derivative is used to determine whether a pixel lies on
a dark or light side of an edge.
In this work, we first evaluate the FOD-LBP op-
erator and the SOD-LBP operator for edge detection.
Next, we compare the results of the proposed FG/BG
segmentation method with the results of the state-
of-the-art technique in (Heikkil¨a and Pietik¨ainen,
2006). The method is implemented and tested on low-
resolution images produced by monochromatic smart
sensors. In the experiments, we consider varying il-
lumination conditions and video resolutions. When
evaluated against ground truth, we will show that
the edge-based method outperforms texture-based FG
segmentation at low resolutions. An important contri-
bution in this work consists of the demonstration that
edge information is more important than texture infor-
mation at low resolutions. We will show that lowering
the image resolution quadratically reduces texture in-
formation and linearly reduces edge information.
1.1 Related Work
The LBP operator has been succesfully applied to var-
ious computer vision problems such as face recogni-
tion (Ahonen et al., 2006), BG subtraction (Heikkil¨a
and Pietik¨ainen, 2006), recognition of 3D textured
surfaces (Pietik¨ainen et al., 2004) and describing in-
terest regions (Heikkil¨a et al., 2009). The LBP has
properties that favor its usage in this work, such as
tolerance against illumination changes and computa-
tional simplicity.
In some studies edge detection has been used prior
to LBP computation to enhance the gradient infor-
mation. Yao and Chen (Yao and Chen, 2003) pro-
posed local edge patterns (LEP) to be used with color
features for color texture retrieval. In LEP, the So-
bel edge detection and thresholding are used to find
strong edges, and then LBP-like computation is used
to derive the LEP patterns. In their method for shape
localization Huang el al. (Huang et al., 2004) pro-
posed an approach in which gradient magnitude im-
ages and original images are used to describe the lo-
cal appearance pattern of each facial keypoint. A
derivative-based LBP is used by applying LBP com-
putation to the gradient magnitude image obtained by
a Sobel operator. The Sobel-LBP later proposed by
Zhao et al. (Zhao et al., 2008) uses the same idea for
facial image representation. First the Sobel edge de-
tector is used and the LBPs are computed from the
gradient magnitude images. The difference with our
work is that above-mentioned methods compute tradi-
tional LBPs of edge images, while our method gathers
the edge information from novel LBP operators.
Inspired by LBP, higher order local derivative pat-
terns (LDP) were proposed by Zhang et al., with ap-
plications in face recognition (Zhang et al., 2010).
The patterns extracted by LDP will provide more de-
tailed information, but may also be more sensitive to
noise than in LBP. In above-mentioned work the fo-
cus is on texture, while in this work the focus is on
edges.
Besides the FG segmentation algorithm based on
LBPs (Heikkil¨a and Pietik¨ainen, 2006), there exist
several other techniques for FG/BG segmentation.
We give an overview of the most recent and best per-
forming algorithms. The Gaussian Mixture Model
(GMM) method of (Zivkovic, 2004) uses a variable
number of Gaussians to model the color value distri-
bution of each pixel as a multi-modal signal. This
parametric approach adapts the model parameters to
statistical changes. ViBe (Barnich and Droogen-
broeck, 2009) is a sample-based approach for model-
ing the color value distribution of pixels. The sample
set is updated according to a random process that sub-
stitutes old pixel values for new ones. In (Gr¨uenwedel
et al., 2011), the FG is subtracted from the BG by
detecting moving Sobel edges. Edge dependencies
are used as statistical features of FG and BG re-
gions and FG is defined as regions containing mov-
ing edges, and BG as regions containing static edges
in the scene. The BG modeling uses gradient esti-
mates in x and y-direction. Above-mentioned algo-
rithms have limited opportunitiesto scale downto low
resolutions.
The remainder of this paper is organized as fol-
lows: Section 2 describes a novel strategy to extract
edge-based LBPs. Firstly, subsection 2.1 summarizes
the basic concepts of LBPs. Secondly, subsection
2.2 presents higher order derivative LBP edge oper-
ators, more specifically the FOD-LBP and the SOD-
LBP. The method for LBP FG/BG segmentation is
presented in section 3 of which the results are pre-
sented in section 4. The FOD-LBP and the SOD-LBP
are evaluated for edge detection and FG/BG segmen-
tation in subsections 4.1 and 4.2, respectively. Finally,
we conclude our paper in 5.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
340

Neighbourhood BinaryPattern
ncn4
n5
n6
n7
n0
n1
n2
n3
LBP =
s(n
0
− n
c
)2
0
+
s(n
1
− n
c
)2
1
+
s(n
2
− n
c
)2
2
+
s(n
3
− n
c
)2
3
+
s(n
4
− n
c
)2
4
+
s(n
5
− n
c
)2
5
+
s(n
6
− n
c
)2
6
+
s(n
7
− n
c
)2
7
FOD-LBP =
m(n
0
− n
4
)2
0
+
m(n
1
− n
5
)2
1
+
m(n
2
− n
6
)2
2
+
m(n
3
− n
7
)2
3
SOD-LBP =
s(n
0
− 2n
c
+ n
4
)2
0
+
s(n
1
− 2n
c
+ n
5
)2
1
+
s(n
2
− 2n
c
+ n
6
)2
2
+
s(n
3
− 2n
c
+ n
7
)2
3
(a) (b) (c) (d)
Figure 1: (a): A centre pixel and a circular neighbourhood
of 8 pixels. (b) The basic LBP feature obtained by sum-
ming the thresholded differences weighted by powers of
two. If the grey level of the neighbouring pixel is higher
or equal, the value is set to one, otherwise to zero. (c): The
FOD-LBP feature represents the magnitudes of the first or-
der derivatives. (d): The SOD-LBP feature represents the
signs of the second order derivatives.
2 EDGE-BASED LOCAL BINARY
PATTERNS
In this section, we introduce edge-based LBPs with
a novel generic strategy for higher order derivative
LBPs. To understand the LBP concepts, we start this
section by explaining basic LBPs.
2.1 Basic Local Binary Patterns
The basic LBP operator by Ojala et al. (Ojala et al.,
2002) was proposed to describe local textural pat-
terns. The LBP operator describes each pixel at po-
sition (x,y) by the relative grey levels of its neigh-
bouring pixels as a binary number (binary pattern):
LBP
R,N
(x,y) =
N−1
∑
i=0
s(n
i
− n
c
)2
i
, s(x) =
1 x ≥ 0,
0 otherwise,
(1)
where n
c
corresponds to the greylevelof the centre
pixel of a local neighbourhood and n
i
to the grey lev-
els of N equally spaced pixels on a circle of radius R.
The neighbouring pixel values are bilinearly interpo-
lated whenever the sampling point is not in the centre
of a pixel, as illustrated in Figure 1 (a). The pixels in
the neighbourhood are thresholded by its centre pixel
value, multiplied by powers of two and then summed
to obtain a label for the centre pixel, as illustrated in
Figure 1 (b). In practice, Eq. 1 means that the signs of
the differences in a neighbourhood are interpreted as
an N-bit binary number, resulting in 2
N
distinct values
for the binary pattern. The 2
N
-bin histogram of the bi-
nary patterns computed over a region is used for tex-
ture description. The LBP features have proven to be
robust against illumination changes, rotationally in-
variant, very fast to compute, and to not require many
Edge BinaryPattern
5548
52
65
69
70
67
53
40
LBP
R,8
= 11000011,
FOD-LBP
R,8,15
= 1101,
SOD-LBP
R,8
= 1110
Figure 2: (a): A neighbourhood of 8 pixels representing an
edge (b): Codes for basic LBP, FOD-LBP and SOD-LBP,
respectively.
parameters being set (Ojala et al., 1996; Ojala et al.,
2002).
The histogram of the binary patterns computed
over a region is used for texture description. To re-
duce the histogram size of the LBP, only so-called
uniform patterns are considered (M¨aenp¨a¨a et al.,
2000). To measure uniformity of a pattern, the num-
ber of bitwise transitions from 0 to 1 or vice versa
is considered. An LBP is called uniform if its uni-
formity measure is at most 2. In uniform LBP map-
ping there is a separate output label for each uni-
form pattern and all the non-uniform patterns are as-
signed to a single label. Thus, the number of differ-
ent output labels for mapping for patterns of N bits
is N(N − 1) + 3. For instance, the uniform mapping
produces 59 output labels for neighbourhoods of 8
sampling points. Uniform LBP codes represent lo-
cal primitives including spots, flat areas, edges, edge
ends, curves and so on. A numerical example of com-
puting the basic LBP code of an edge pixel is shown
in Figures 2. Note that the basic LBP represents the
first-order circular derivative pattern of images, a mi-
cropattern generated by the concatenation of the bi-
nary gradient directions, as was shown in (Ahonen
and Pietik¨ainen, 2009).
2.2 Higher Order Derivative Local
Binary Patterns
Whereas the basic LBP operator is mainly used for
texture analysis, in this work we employ the LBP as
an edge operator. Therefore, we translate basic edge
detection concepts to a novel generic LBP strategy.
We introduce two novel LBP operators, i.e. the FOD-
LBP operator and the SOD-LBP operator.
Edge operators(Gonzalez and Woods, 2001), such
as the Sobel operator, use the magnitude of the first
derivative (the gradient) to detect the presence of an
edge at a point in an image (i.e., todetermine if a point
is on a ramp). Similarly, the sign of the second deriva-
tive (the Laplacian) is used to determine whether a
pixel lies on a dark or light side of an edge. Defini-
tions and discrete patterns of the 1-D gradient G
x
and
the 1-D Laplacian L
x
of a function g(x) are given in
Edge-basedForegroundDetectionwithHigherOrderDerivativeLocalBinaryPatternsforLow-resolutionVideo
Processing
341

gradient Pattern
G
x
=
∂g(x)
∂x
∼
=
g(x) − g(x− 1)
1 -1
Laplacian
L
x
=
∂
2
g(x)
∂
2
x
∼
=
g(x+ 1) − 2g(x) + g(x − 1)
1 -2
1
(a) (b)
Figure 3: (a) − (b): Definitions and discrete patterns of the
1-D gradient G
x
and the 1-D Laplacian L
x
of a function
g(x).
Figure 3.
Basic LBPs as in Section 2.1 can be seen as pat-
terns of the signs of the gradients, because like some
gradient operators, it considers grey level differences
between pairs of pixels in a neighbourhood. Here, the
discrete pattern {1, −1} of the gradient is translated
into the FOD-LBP, which represents the magnitudes
of the first order derivatives at position (x,y) as fol-
lows:
FOD-LBP
R,N,T
(x,y) =
N/2−1
∑
i=0
m(n
i
− n
i+N/2
)2
i
,
m(x) =
1 |x| ≥ T
l
,
0 otherwise,
(2)
where n
i
and n
i+N/2
correspond to the grey values of
centre-symmetric pairs of pixels of N equally spaced
pixels on a circle of radius R. The absolute values of
the grey level differences are thresholded with a small
value T
l
. A typical value for T
l
is 10. In FOD-LBP,
pixel values are not compared to the centre pixel but
to the opposing pixel symmetrically with respect to
the centre pixel, which is also illustrated in Figures 1
(a) and (c). This halves the number of comparisons
for the same number of neighbours. We can see that
for eight neighbours, FOD-LBP produces 16 different
binary patterns. This modified scheme of comparing
the pixels in the neighbourhood was already proposed
in the form of Centre Symmetric LBPs (CS-LBPs) in
(Heikkil¨a et al., 2009) as a solution to produce shorter
histograms in the context of a region descriptor. Also,
CS-LBP obtained robustness on flat image regions by
thresholding the grey level differences at a typically
non-zero threshold. FOD-LBP differs from CS-LBP
in the evaluation function m(x). FOD-LBP thresholds
the absolute value of x, where CS-LBP thresholds the
real value of x. A numerical example of computing
the FOD-LBP code of an edge pixel is shown in Fig-
ure 2.
Similar to the FOD-LBP, the SOD-LBP represents
the signs of the second order derivatives at position
(x,y) as follows:
SOD-LBP
R,N
(x,y) =
N/2−1
∑
i=0
f(n
i
− 2n
c
+ n
i+N/2
)2
i
,
s(x) =
1 x ≥ 0,
0 otherwise,
(3)
which is a translation of the discrete pattern {1, − 2,1}
of the Laplacian operator to binary patterns, which
is also illustrated in Figures 1 (a) and (d). A nu-
merical example of computing the SOD-LBP code
of an edge pixel is shown in Figure 2. The second
order derivative is sensitive to noise. Therefore, for
SOD-LBP only, we firstly pre-process the image with
Gaussian smoothing as in the Laplacian of Gaussian
method (Marr and Hildreth, 2000). The SOD-LBP
looks for zero-crossings. Zero-crossings are places
in the Laplacian of an image where the value of the
Laplacian passes through zero, i.e. points where the
Laplacian changes sign. Such points often occur at
edges in images, i.e. points where the intensity of the
image changes rapidly, but they also occur at places
that are not as easy to associate with edges, so-called
false edges. Therefore, we consider the SOD-LBP
as some sort of feature detector rather than a specific
edge detector.
As it was originally proposed in (Ojala et al.,
1996), the practical implementation of the FOD-LBP
operator and the SOD-LBP operator consider a 3x3
squared pixel block for each pixel of a low-resolution
image to avoid floating point operations on the smart
monochromatic sensors. Thus, for low-resolution im-
ages, the radius R is kept small, i.e. 1 pixel. Also in
this work, the FOD-LBP operator and the SOD-LBP
operator each assign different output labels to 14 uni-
form patterns and one single label to 2 non-uniform
patterns. Remember that each operator produces 2
4
different binary patterns. Note that the FOD-LBP
operator and the SOD-LBP operator are straightfor-
wardly extendable to higher order derivative LBPs,
e.g. the third order derivative LBP according to the
discrete pattern {1,−3,3,−1} in two circles of a 3x3
and a 5x5 neighbourhood, respectively.
3 FOREGROUND DETECTION
FROM MOVING EDGES
FG/BG segmentation in this work describes the
neighbourhood of each pixel in the background as a
group of local binary pattern histograms. The differ-
ences with the framework proposed in (Heikkil¨a and
Pietik¨ainen, 2006) are in the input and the binning of
the histograms, yet the BG model update procedure is
the same.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
342

As input, we use edge-based uniform LBP fea-
tures instead of texture-based LBP features, i.e. two
4-bit uniform binary codes of the FOD-LBP and the
SOD-LBP instead of one 6-bit binary code of the ba-
sic LBP. Histogram binning is performed for each
pixel by mapping 15 FOD-LBP labels and 15 SOD-
LBP labels over two 6-bin histograms, respectively.
The histograms contain 5 bins for the uniform labels
and 1 bin for the non-uniform labels. Each bin covers
a class of uniform labels which are rotated versions
of one another, since rotated versions represent the
same edge features (Ojala et al., 2002). Histogram
binning in this work has the advantage of producing
dense histograms with non-empty bins. In compari-
son, histogram binning in (Heikkil¨a and Pietik¨ainen,
2006) maps 64 output labels over a 64-bin histogram
for each pixel, as such that the histograms suffer from
sparsity.
In the following, we shortly explain the BG
model update procedure as described in (Heikkil¨a and
Pietik¨ainen, 2006). The evolution of the feature vec-
tors of a particular pixel over time is considered as
a pixel process. The LBP histogram computed over
a circular region of a user-settable radius around the
pixel is used as the feature vector. For low-resolution
images, this radius is kept small (e.g. 1). The BG
model for the pixel consists of a user-settable num-
ber of adaptive LBP histograms (e.g. 3). Each model
histogram has a weight between 0 and 1 so that the
weights sum up to one. The LBP histogram
~
h of the
given pixel from the new frame is compared to the
current model histograms using the histogram inter-
section as a proximity measure. The threshold for
the proximity measure, T
p
, is a user-settable param-
eter (e.g. 0.7). If the proximity is below the thresh-
old T
p
for all model histograms, the model histogram
with the lowest weight is replaced by
~
h with an initial
weight.
If matches were found, more processing is re-
quired. The best match is selected as the model his-
togram with the highest proximity value. The best
matching model histogram is adapted with the new
data by updating its bins using a user-settable learning
rate (e.g. 0.01). The weights of the model histograms
are updated with another user-settable learning rate
(e.g. 0.01).
FG detection is done before updating the BG
model. The histogram
~
h is compared against the cur-
rent BG histograms using the proximity measure as
defined in the update algorithm. If the proximity is
higher than the threshold T
p
, the pixel is classified as
BG. Otherwise, the pixel is marked as FG.
(a) (b)
(c) (d) (e) (f)
Figure 4: (a): An artificial greyscale image with an image
resolution of 128x128 to evaluate the FOD-LBP edge op-
erator and the SOD-LBP edge operator. (b): The ground
truth edge image. (c) − (d): Result of edge detection with
the gradient operator, the FOD-LBP operator, the Laplacian
operator and the SOD-LBP operator, respectively.
4 RESULTS
In the next two subsections, we firstly evaluate the
FOD-LBP operator and the SOD-LBP operator for
edge detection. Next, we compare the results of the
proposed LBP FG/BG segmentation method with the
results of the state-of-the-art technique in (Heikkil¨a
and Pietik¨ainen, 2006).
4.1 Evaluation of LBP Edge Operators
To obtain the edge detection performance, the FOD-
LBP operator and the SOD-LBP operator are evalu-
ated on a subset of 20 meaningful artificial images
with an image resolution of 128x128, of which Fig-
ure 4 (a) shows an example. The results are compared
against ground truth, as in Figure 4 (b). We also com-
pare the FOD-LBP operator and the SOD-LBP oper-
ator to the traditionally used gradient edge operator
and Laplacian edge operator. The FOD-LBP opera-
tor and the gradient operator classify edge pixels with
a threshold on the magnitude. The SOD-LBP oper-
ator and the Laplacian operator classify edge pixels
from sign changes (zero-crossings). Additionally, the
FOD-LBP operator and the SOD-LBP operator each
classify pixels as edge pixels if the pattern is uniform
with at least one bitwise transition. Figures 4 (c) to
( f) show the results of edge detection with the gra-
dient operator, the FOD-LBP operator, the Laplacian
operator and the SOD-LBP operator, respectively.
Table 1 presents an overview of the True Posi-
tive Rates (TPR=TP/(TP+FN)) and the False Positive
Rates (FPR=FP/(FP+TN)) for edge detection, where
TP, FN, FP and TN are the amount of True Positives,
False Negatives, False Positives and True Negatives,
respectively. In our evaluation, we consider differ-
Edge-basedForegroundDetectionwithHigherOrderDerivativeLocalBinaryPatternsforLow-resolutionVideo
Processing
343

ent levels of Gaussian noise corruption, where σ is
the Gaussian kernel standard deviation. From the vi-
sual and numeric results we can conclude that the
FOD-LBP operator and the SOD-LBP operator per-
form equally well or better than the gradient opera-
tor and the Laplacian operator, respectively. The bet-
ter performance with the LBP approach is due to the
larger amount of information about intensity differ-
ences. Another conclusion is that the Laplacian op-
erator and the SOD-LBP operator are more sensitive
to noise. Consequently, we firstly pre-process the im-
age with Gaussian smoothing before FG/BG segmen-
tation.
4.2 Evaluation of Edge-based LBP
Foreground Segmentation
Low-resolution video in this work is obtained from a
low-resolution sensor network. The sensor network
consists of low resolution monochromatic smart sen-
sors, so-called mouse sensors
1
. Each mouse sensor
is controlled by a digital signal controller
2
. Algo-
rithms run in an embedded memory constrained en-
vironment. Figure 5 a shows an example of the low
resolution sensor controlled by the digital signal con-
troller on a printed circuit board. Figure 5 b shows
an example image with an image resolution of 30x30
pixels and an image depth of 6 bit. Video sequences
are captured with illumination changes from fluores-
cent lamps and daylight in a room with a table, chairs
and a window. The results of FG/BG segmentation
are compared against ground truth. An example of
a mouse sensor image and its ground truth FG mask
are shown in Figures 6 (a) and (b), respectively. In
the following experiments, we evaluate 150 frames
spread over 10000 frames.
We compare the results of FG/BG segmentation
produced by the FOD-LBP operator and the SOD-
LBP operator with the results produced by the method
described in (Heikkil¨a and Pietik¨ainen, 2006), which
we denote as LBP. Figure 7 (a) shows a mouse sensor
frame which we compute the FG for. Figures 7 (b),
(c) and (d) show the FG masks of FG/BG segmen-
tation when the BG is modelled with LBP features,
FOD-LBP features and FOD-LBP + SOD-LBP fea-
tures, respectively. In comparison with the texture-
based LBP, we can clearly observe that the results
with the FOD-LBP and the FOD-LBP + SOD-LBP
1
Agilent ADNS-3060: a high-performance optical
mouse sensor with a programmable frame rate over 6400
frames, capturing images with an image resolution of 30x30
pixels and an image depth of 6 bit.
2
Microchip dsPIC33FJ128GP802: a digital signal con-
troller with a 16-bit wide data path and 64kB RAM.
(a) (b)
Figure 5: (a): A low resolution stereo-vision monochro-
matic smart sensor, a so-called mouse sensor. (b): An ex-
ample image with an image resolution of 30x30 pixels and
an image depth of 6 bit.
(a) (b)
Figure 6: (a) − (b): An example of a mouse sensor image
and its ground truth.
extract the silhouette of the person. This is because
the LBP technique considers FG as moving texture,
whereas the FOD-LBP technique and the FOD-LBP
+ SOD-LBP technique consider FG as moving edges.
The graph in Figure 8 plots the ROC curves (TPR
versus FPR) for FG/BG segmentation with the LBP
features, the FOD-LBP features and the FOD-LBP
+ SOD-LBP features. The ROC curves are obtained
by a varying threshold T
p
. When evaluated against
ground truth, we conclude that the FOD-LBP tech-
nique and the FOD-LBP + SOD-LBP technique out-
perform the LBP technique. Using the FOD-LBP +
SOD-LBP features is even better than using the FOD-
LBP features only, since the FOD-LBP features only
contain the magnitudes of the first order derivatives,
while the FOD-LBP + SOD-LBP features also con-
tain the signs of the second order derivatives, and thus
more comprehensive edge information. The edge-
based FG segmentation outperforms the texture-based
method at low resolutions. Since texture information
corresponds to 2-d area and edge information corre-
sponds to 1-d contours, lowering the image resolution
quadratically reduces texture information and linearly
reduces edge information. Consequently, moving in-
tensity differences are more relevant in low-resolution
video.
In a second experiment, we consider video with a
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
344
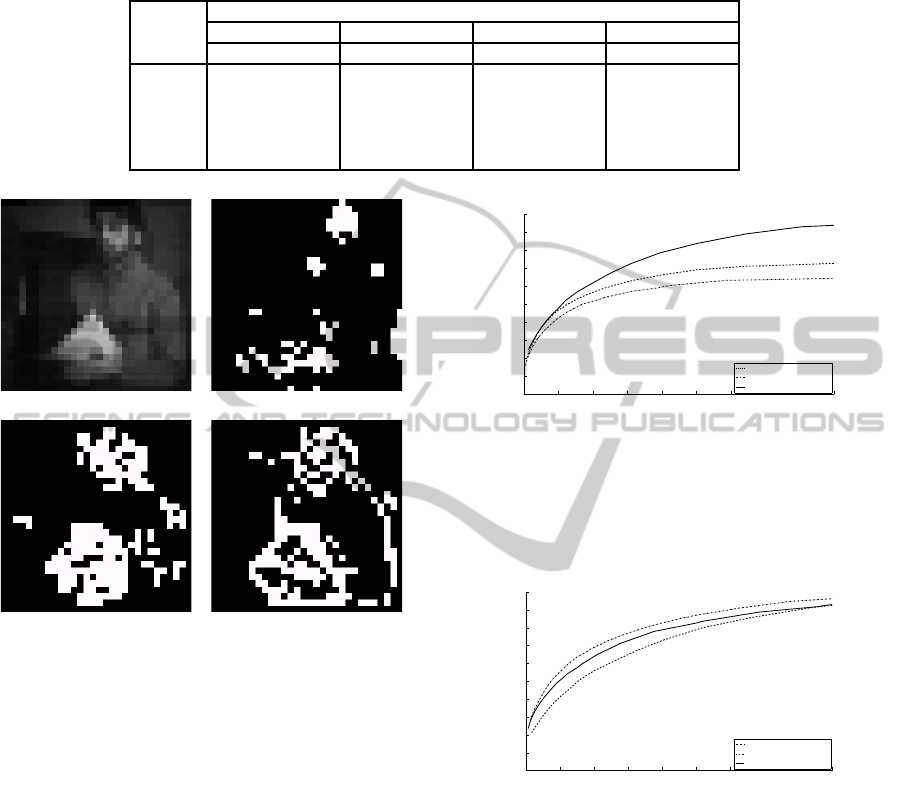
Table 1: TPR and FPR of edge detection with the gradient operator, the FOD-LBP operator, the Laplacian operator and the
SOD-LBP operator, when testing artificial images for different levels of Gaussian noise corruption. The FOD-LBP operator
and the SOD-LBP operator perform equally well or better than the gradient operator and the Laplacian operator, respectively.
Artificial images
gradient FOD-LBP Laplacian SOD-LBP
TPR FPR TPR FPR TPR FPR TPR FPR
σ = 0 0.817 0.010 0.864 0.004 0.927 0.005 0.942 0.005
σ = 5 0.833 0.010 0.864 0.004 0.924 0.007 0.945 0.104
σ = 10 0.834 0.010 0.866 0.004 0.921 0.082 0.953 0.378
σ = 20 0.830 0.010 0.862 0.006 0.926 0.351 0.977 0.746
σ = 50 0.827 0.023 0.892 0.242 0.920 0.702 0.985 0.943
(a) (b)
(c) (d)
Figure 7: (a): A mouse sensor frame with resolution of
30x30 pixels. (b)−(d): The FG masks of FG/BG segmen-
tation when the BG is modelled with the LBP features, the
FOD-LBP features and the FOD-LBP + SOD-LBP features,
respectively. The results with the FOD-LBP features and
the FOD-LBP + SOD-LBP features extract the silhouette of
the person.
higher resolution of 384x288 pixels from the TUM
Kitchen Data Set (Tenorth et al., 2009). From the
ROC curves in Figure 9, we can conclude that the
method with the LBP features has a better perfor-
mance than the methods with the FOD-LBP features
and the FOD-LBP + SOD-LBP features. This is be-
cause texture information becomes a more important
factor in high-resolution video.
5 CONCLUSIONS
In this work, we presented extremely low-resolution
foreground/background segmentation on video with
resolution of 30x30 pixels. Therefore, we adapted
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
ROC curves of low−resolution foreground detection
FPR
TPR
LBP
FOD−LBP
FOD−LBP + SOD−LBP
Figure 8: ROC curves for FG/BG segmentation in low-
resolution video. Edge-based FG detection with the FOD-
LBP operator and the SOD-LBP operator outperforms
texture-based FG detection with the LBP operator (Heikkil¨a
and Pietik¨ainen, 2006), since moving intensity differences
are more visible in low-resolution video.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
ROC curves of high−resolution foreground detection
FPR
TPR
LBP
FOD−LBP
FOD−LBP + SOD−LBP
Figure 9: ROC curves for FG/BG segmentation in high-
resolution video. Texture-based FG detection with LBP
(Heikkil¨a and Pietik¨ainen, 2006) is better than edge-based
FG detection with the FOD-LBP features and the FOD-LBP
+ SOD-LBP features, since texture becomes a more impor-
tant factor in high-resolution video.
a texture-based foreground segmentation algorithm
based on LBPs into an edge-based method for low-
resolution video processing. Edge information in the
background model is introduced by a novel LBP strat-
egy with higher order derivatives. Like the gradient
operator and the Laplacian operator, edge informa-
tion in this work is obtained by the magnitudes of
FOD-LBPs and the signs of SOD-LBPs. In the re-
sults, foreground corresponds to edges on moving ob-
jects. The method is implemented and tested on low-
Edge-basedForegroundDetectionwithHigherOrderDerivativeLocalBinaryPatternsforLow-resolutionVideo
Processing
345

resolution images produced by monochromatic smart
sensors. The edge-based method outperformstexture-
based foreground segmentation at low resolutions. In
this work, we demonstrated that edge information be-
comes more relevant than texture information when
the image resolution scales down.
ACKNOWLEDGEMENTS
The work was financially supported by iMinds and
IWT through the Project ‘LittleSister’.
REFERENCES
Ahonen, T., Hadid, A., and Pietik¨ainen, M. (2006). Face
description with local binary patterns: application to
face recognition. IEEE Trans. on Pattern Recogn. and
Machine Intelligence, 28(12):2037–2041.
Ahonen, T. and Pietik¨ainen, M. (2009). Image description
using joint distribution of filter bank responses. Pat-
tern Recognition Letters, 30(4):368–376.
Barnich, O. and Droogenbroeck, M. V. (2009). Vibe: a pow-
erful random technique to estimate the background in
video sequences. In IEEE Int. Conf. on Acoustics,
Speech and Signal Processing, pages 945–948.
Camilli, M. and Kleihorst, R. P. (2011). Demo: Mouse sen-
sor networks, the smart camera. In ACM/IEEE Int.
Conf. on Distributed Smart Cameras, pages 1–3.
Gonzalez, R. C. and Woods, R. E. (2001). Digital Im-
age Processing. Addison-Wesley Longman Publish-
ing Co., Boston, MA, USA, 2nd edition.
Gr¨uenwedel, S., Hese, P. V., and Philips, W. (2011). An
edge-based approach for robust foreground detection.
In Proc. of Advanced Concepts for Intelligent Vision
Systems, pages 554–565.
Gr¨unwedel, S., Jelaˇca, V., Hese, P. V., Kleihorst, R., and
Philips, W. (2011). Phd forum : Multi-view occu-
pancy maps using a network of low resolution visual
sensors. In 2011 Fifth ACM/IEEE Int. Conf. on Dis-
tributed Smart Cameras. IEEE.
Gr¨unwedel, S., Jelaˇca, V., no Casta˜neda, J. N., Hese, P. V.,
Cauwelaert, D. V., Haerenborgh, D. V., Veelaert, P.,
and Philips, W. (2013). Low-complexity scalable
distributed multi-camera tracking of humans. ACM
Transactions on Sensor Networks, 10(2).
Heikkil¨a, M. and Pietik¨ainen, M. (2006). A texture-based
method for modeling the background and detecting
moving objects. IEEE Trans. on Pattern Recognition
and Machine Intelligence, 28(4):657–662.
Heikkil¨a, M., Pietik¨ainen, M., and Schmid, C. (2009). De-
tection of interest regions with local binary patterns.
Pattern Recognition, 42(3):425–436.
Hengstler, S. and Aghajan, H. (2006). A smart camera mote
architecture for distributed intelligent surveillance. In
ACM SenSys Workshop on Distributed Smart Cam-
eras.
Huang, X., Li, S., and Wang, Y. (2004). Shape localiza-
tion based on statistical method using extended local
binary pattern. In Proc. of Int. Conf. on Image and
Graphics, pages 184–187.
M¨aenp¨a¨a, T., Ojala, T., Pietik¨ainen, M., and Soriano, M.
(2000). Robust texture classification by subsets of lo-
cal binary patterns. In Proc. of Int. Conf. on Pattern
Recognition, pages 935–938.
Marr, D. and Hildreth, E. (2000). Theory of edge detection.
In Proc. of Int. Conf. on Pattern Recognition, volume
207, pages 935–938.
Movshon, J., Adelson, E. H., Gizzi, M. S., and Newsome,
W. T. (1986). The analysis of moving visual patterns.
Pattern Recognition Mechanisms, 54:117–151.
Ojala, T., Pietik¨ainen, M., and Harwood, D. (1996). A com-
parative study of texture measures with classification
based on feature distributions. Pattern Recognition,
29(1):51–59.
Ojala, T., Pietik¨ainen, M., and M¨aenp¨a¨a, T. (2002). Mul-
tiresolution gray-scale and rotation invariant texture
classification with local binary patterns. IEEE Trans.
on Pattern Recognition and Machine Intelligence,
24(7):971–987.
Pietik¨ainen, M., Nurmela, T., M¨aenp¨a¨a, T., and Turtinen,
M. (2004). View-based recognition of real-world tex-
tures. Pattern Recognition, 37(2):313–323.
Tenorth, M., , M., Bandouch, J., and Beetz, M. (2009). The
tum kitchen data set of everyday manipulation activ-
ities for motion tracking and action recognition. In
Computer Vision Workshops (ICCV Workshops), 2009
IEEE 12th International Conference on, pages 1089–
1096.
Yao, C.-H. and Chen, S.-Y. (2003). Retrieval of translated,
rotated and scaled color textures. Pattern Recognition,
36(4):913–929.
Zhang, B., Gao, Y., Zhao, S., and Liu, J. (2010). Lo-
cal derivative pattern versus local binary pattern: face
recognition with high-order local pattern descriptor.
IEEETrans.onIm. Proc., 19(2):533–544.
Zhao, S., Gao, Y., and Zhang, B. (2008). Sobel-lbp. In IEEE
Int. Conf on Image Processing, pages 2144–2147.
Zivkovic, Z. (2004). Improved adaptive gaussian mixture
model for background subtraction. In Proc. of Int.
Conf. on Pattern Recogn., pages 28–31.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
346
