BITalino: A Novel Hardware Framework for Physiological Computing
Hugo Pl
´
acido da Silva
1
, Jos
´
e Guerreiro
1
, Andr
´
e Lourenc¸o
2
, Ana Fred
1
and Ra
´
ul Martins
1
1
Instituto de Telecomunicac¸
˜
oes, Instituto Superior T
´
ecnico
Avenida Rovisco Pais, 1, 1049-001 Lisboa, Portugal
2
Instituto Superior de Engenharia de Lisboa
Rua Conselheiro Em
´
ıdio Navarro, 1, 1959-007 Lisboa, Portugal
Keywords:
Biosignals, Instrumentation, Electromyography, Electrocardiography, Electrodermal Activity, Accelerometry.
Abstract:
Physical computing has spun a true global revolution in the way in which the digital interfaces with the real
world. From bicycle jackets with turn signal lights to twitter-controlled christmas trees, the Do-it-Yourself
(DiY) hardware movement has been driving endless innovations and stimulating an age of creative engineer-
ing. This ongoing (r)evolution has been led by popular electronics platforms such as the Arduino, the Lilypad,
or the Raspberry Pi, however, these are not designed taking into account the specific requirements of biosig-
nal acquisition. To date, the physiological computing community has been severely lacking a parallel to that
found in the DiY electronics realm, especially in what concerns suitable hardware frameworks. In this paper,
we build on previous work developed within our group, focusing on an all-in-one, low-cost, and modular
biosignal acquisition hardware platform, that makes it quicker and easier to build biomedical devices. We
describe the main design considerations, experimental evaluation and circuit characterization results, together
with the results from a usability study performed with volunteers from multiple target user groups, namely
health sciences and electrical, biomedical, and computer engineering.
1 INTRODUCTION
Nowadays, low-cost hardware is driving innovation in
ways never before seen; in his book ”The Medici Ef-
fect”, Frans Johansson states that ”When you step into
an intersection of fields, disciplines, or cultures, you
can combine existing concepts into a large number of
extraordinary ideas” (Johansson, 2006), which is par-
tially the secret behind this ongoing revolution. Phys-
ical computing has grown as a field in its own right
(O’Sullivan and Igoe, 2004), and so far it has mostly
been characterized by the use of hardware designed to
deal with requirements that are not completely com-
patible with the needs of biosignal acquisition, such as
relatively high tolerance to noise, low sampling rates,
no need for galvanic isolation, among others.
While physical computing has the Arduino and its
successors and predecessors as stepping stones, the
physiological computing community has been mostly
lacking a comparable tool. Biosignals have very spe-
cific requirements, and many projects end up heav-
ily bounded by the high cost and limited access to
suitable hardware materials. Building on the guid-
ing principles of existing Do-it-Yourself (DiY) hard-
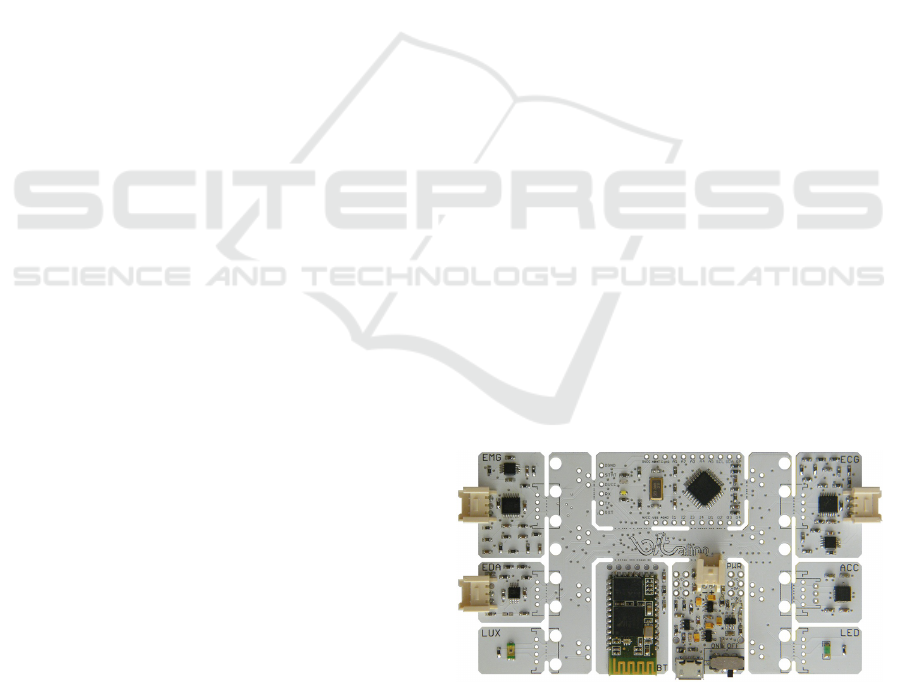
ware platforms, in this paper we focus on BITalino;
Figure 1: BITalino biosignal acquisition board.
a low-cost and highly versatile hardware framework
designed to allow anyone, from students to profes-
sional app developers, to create projects and applica-
tions with physiological sensors (Figure 1).
The rest of the paper is organized as follows: Sec-
tion 2 describes the background and related work;
Section 3 details the overall architecture of BITalino;
Section 4 presents the analog biosignal acquisition
blocks and their benchmarking; Section 5 highlights
the results of a usability study performed with multi-
ple potential target user groups; and finally Section 6
summarizes the main conclusions and future work.
246
Plácido da Silva H., Guerreiro J., Lourenço A., Fred A. and Martins R..
BITalino: A Novel Hardware Framework for Physiological Computing.
DOI: 10.5220/0004727802460253
In Proceedings of the International Conference on Physiological Computing Systems (PhyCS-2014), pages 246-253
ISBN: 978-989-758-006-2
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2 BACKGROUND
Several authors have delved into the problem of mak-
ing biosignal acquisition hardware tools accessible to
anyone. One of the most comprehensive work known
to date is the Open EEG Project
1
. This is a commu-
nity driven effort to make affordable hardware and
software tools available for anyone with interest in
working with Electroencephalography (EEG), how-
ever it has been mostly focused on EEG data and is
supported by technologies currently outdated.
With the advent of open source hardware plat-
forms such as the Arduino (Banzi, 2009; Buechley
and Eisenberg, 2008) or Raspberry Pi, efforts have
been made to extend their capabilities to biosignal
data acquisition. OLIMEX
2
created a low-cost sen-
sor shield for Electrocardiography (ECG) and Elec-
tromyography (EMG), Advancer Technologies has
devised the MuscleSensor
3
for EMG; the Pulse Sen-
sor
4
for Blood Volume Pulse (BVP) data acquisition
is yet another example. All of these are focused on
very specific modalities and limited to the actual ana-
log front-end for the sensors.
The main advantage of the Arduino-based ap-
proaches is the extremely low cost, given that from
$25 anyone can buy an Arduino board. Nonetheless,
they are designed to deal with very simple require-
ments for example in terms of sampling rate accuracy
and tolerance to noise. Previous work from our group
has actually attempted to use an Arduino Pro Mini
board for ECG data acquisition, however, experimen-
tal results clearly demonstrated several of these short-
comings (Alves et al., 2013).
More recently, Libelium
5
has proposed a multi-
modal sensor platform for e-Health, which includes
sensors for BVP, Blood Oxygenation (SpO2), res-
piration, temperature, ECG, glucose, Accelerome-
try (ACC), Electrodermal Activity (EDA), and blood
pressure. The advantage of this platform is the fact
that it integrates multiple sensors with embedded pro-
cessing algorithms. Still, most of the sensors do not
provide access to raw data, all the sensors are bundled
as a single unit (providing low flexibility for custom
hardware configurations), and at ≈$500 it is not af-
fordable for everyone.
Despite the work developed so far, the physiolog-
ical computing community is still lacking adequate
hardware frameworks, leading our group to develop
preliminary work on hardware for multimodal biosig-
1
http://openeeg.sourceforge.net/doc/
2
http://www.olimex.com/SHIELD-EKG-EMG.html
3
http://www.advancertechnologies.com/
4
http://pulsesensor.com/
5
http://www.libelium.com/130220224710/
nal acquisition (Guerreiro et al., 2013). As high-
lighted in our previous work, further research on the
analog front-end of the voltage differential sensors,
namely the ECG and EMG, was needed, and several
usability issues related with the form factor ultimately
limited the scope of application of our initial proposal.
In this paper we address the main problems found
in the state-of-the-art, and present a completely re-
vised approach to BITalino, which has resulted in
the first low-cost, all-in-one, flexible and easy-to-use
hardware framework for physiological computing.
3 ANATOMY OF A BITALINO
3.1 Design Principles
We devised BITalino as an all-in-one ”Credit Card”
form factor that integrates multiple measurement sen-
sors for bioelectrical and biomechanical data acqui-
sition. The digital back-end is supported by a con-
trol block based on the ATmega328P microcontroller,
a power management block, and a communication
block that uses a Class II Bluetooth v2.0 module for
wireless data transfer to a base station (e.g. com-
puter, mobile phone, etc.). Two auxiliary connectivity
blocks introduced in the board enable RJ22 plugs to
be added to the device. The main specifications are
summarized in Table 1.
Table 1: BITalino specifications.
Sampling Rate 1, 10, 100 or 1000 Hz
Analog Ports 4 input (10-bit) + 2 input (6-bit)
Digital Ports 4 input (1-bit) + 4 output (1-bit)
Data Link Bluetooth (range up to 10m)
Actuators LED
Sensors EMG; ECG; EDA; ACC; LUX
Battery 3.7 V Lithium Ion
Weight 30 g / 1.06 oz
Size 105x60 mm / 4.13x2.36 in
By default, the system comes as a single board,
with its onboard sensors pre-connected to analog and
digital ports on the control block. Nonetheless, the
control, power, and communication blocks, as well
as the firmware are completely general purpose, en-
abling people to use only the digital back-end of the
BITalino with their own custom sensor and actuator
designs. Furthermore, each individual block can be
physically detached from the main board, allowing
people to use it in many different ways; in essence,
this architecture enables three configurations:
• Board: BITalino is used with no modifications,
enabling people to simply experiment with the
BITalino:ANovelHardwareFrameworkforPhysiologicalComputing
247
(a) Plugged
(b) Freestyle
Figure 2: Possible BITalino configurations.
onboard sensors for prototyping activities or real
time observation of multiple physiological phe-
nomena (Figure 1);
• Plugged: plugs are added to the BITalino and the
individual sensor blocks are separated from the
BITalino main board, leaving only the control,
power, communication and auxiliary connectiv-
ity blocks, and enabling people to interchangeably
use different sensor combinations (Figure 2(a));
• Freestyle: all the individual blocks are detached
from the BITalino main board, enabling people
to combine them in any way that best suits their
project ideas and applications (Figure 2(b)).
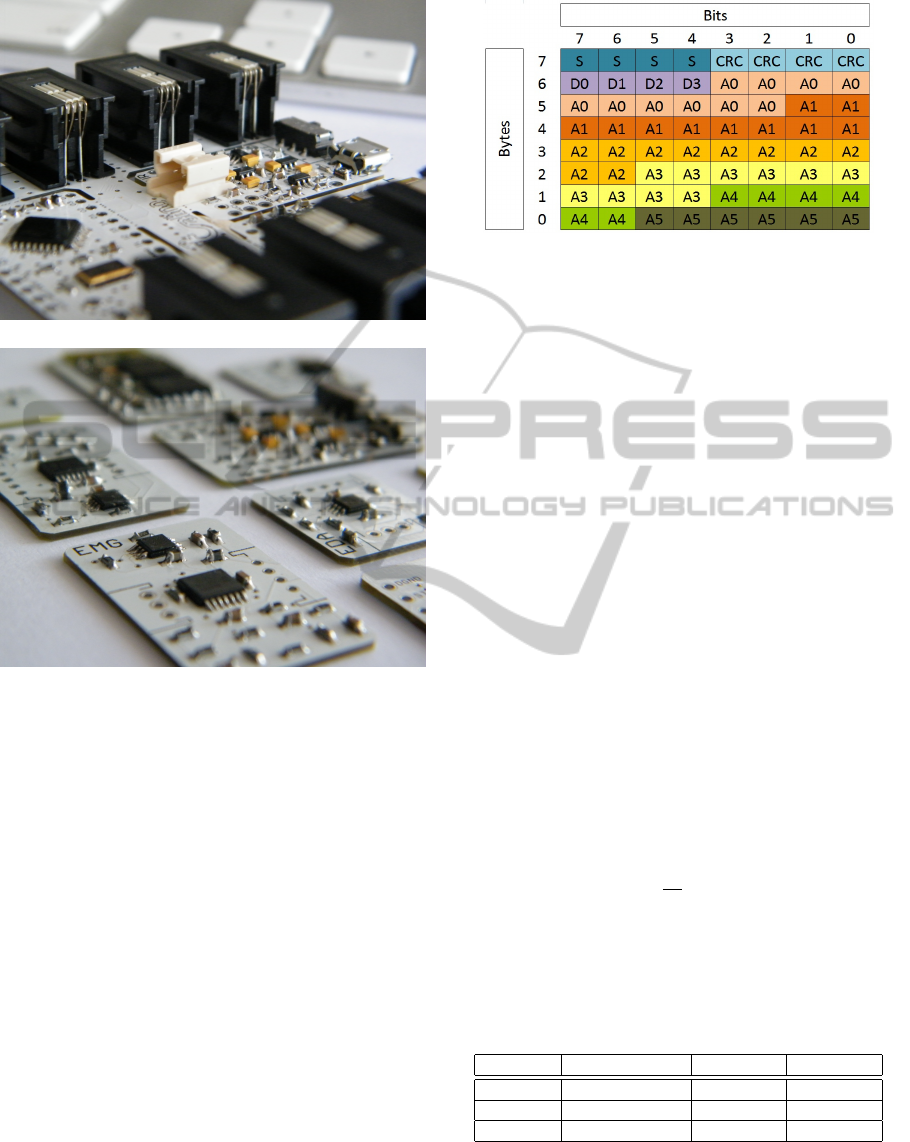
All the input channels selected by the user are
sampled by the MCU on the control block, and for-
matted into data packets of variable size (the extreme
cases are 8 bytes when all analog channels are se-
lected, and 3 bytes when no analog channel is se-
lected); a Cyclic Redundancy Check (CRC) code is
computed to identify and recover from data packet
inconsistency (e.g. due to loss of bytes in the com-
Figure 3: Data packets structure. The bit labels mark the po-
sitions corresponding to: the sequence number S; the CRC
code; each digital input channel D0 to D3, and each analog
channel A0 to A5.
munication), and a packet sequence number is also
added to help on the detection of loss of data packets.
Figure 3 shows the structure of the data packets sent
by the device. The configurable settings on BITalino
can be changed by sending 1 byte commands from
the base station to the device; Figure 4 summarizes
the command set that is interpreted by the device.
3.2 Performance Evaluation
We tested the BITalino to evaluate the performance
during real-time acquisition, namely the sampling
rate accuracy (or temporal uncertainty) and the dy-
namic specifications of the Analog-to-Digital Con-
verter (ADC) in what concerns the Effective Number
of Bits (ENOB), and the quality of the analog front-
end in terms of Signal-to-Noise Ratio (SNR), SNR
plus Distortion (SINAD) and Total Harmonic Distor-
tion (THD). In all of the tests we used an Agilent
33220A Function Waveform Generator.
To characterize the temporal uncertainty of each
version of the BITalino, a synthesized ramp wave with
a frequency of 1 kHz, 3 V
pp
and offset of V
cc
/2 was
acquired and its slope (
∆V
∆t
) was analysed and com-
pared with what was really injected. Table 2 summa-
rizes the temporal uncertainty results; only the sam-
pling rate Fs =1 kHz was tested as it is the most de-
manding.
Table 2: Sampling rate accuracy for each version of the
BITalino (Board, Plugged and Freestyle).
BITalino Fs (real) [Hz] Skew [%] Jitter [%]
Board 999.99 ± 0.025 0.00086 0.0025
Plugged 999.99 ± 0.025 0.00043 0.0025
Freestyle 999.99 ± 0.018 0.00129 0.0018
The ATmega328P features a 10-bit successive ap-
proximation ADC, which runs with input clock fre-
quency of 200 kHz ensuring maximum resolution,
and is connected to a 6-channel Analog Multiplexer
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
248
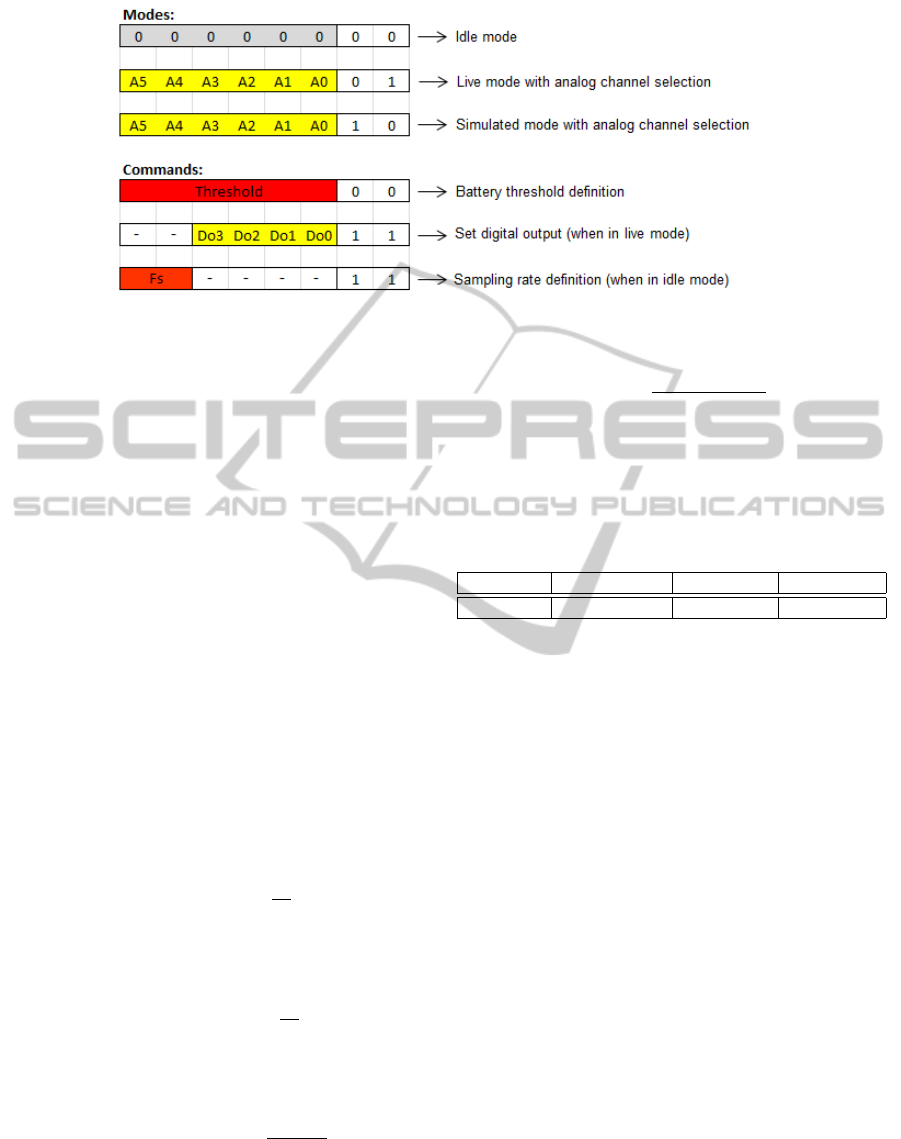
Figure 4: Firmware commands.
with single-ended voltage inputs (0 − 3.3 V). As pre-
viously described, to evaluate the performance of the
ADC we used the SNR, THD, SINAD, and ENOB.
The SNR was computed as the ratio of AC sig-
nal power to noise power below half of the sampling
frequency (Equation 1); it is important to note that
the noise power excludes harmonic signals and DC.
The THD was determined as the sum of the powers
of the harmonic components (spurs) divided by the
input signal power (Equation 2). We computed the
SINAD as the ratio of the amplitude of the fundamen-
tal input signal to the sum of all other spectral compo-
nents below half of the sampling frequency excluding
DC (Equation 3); it is important to note that the the-
oretical minimum for the SINAD is equal to the ideal
SNR (Equation 4). Finally, the ENOB was computed
as shown in Equation 5; a higher ENOB means that
voltage levels recorded in an analog to digital conver-
sion are more accurate.
The crosstalk between each channel was also
tested, and it is less than the ideal SNR (−61.96[dB])
for 10-bits resolution.
SNR(dB) = 10log
10
P
s
P
n
(1)
where P
s
is the signal power and P
n
is the noise power
(exclude harmonic signals and DC).
T HD(dBc) = 10log
10
P
s
P
d
(2)
where P
d
is the power of all the specified spectral
components (harmonics).
SINAD(dBc) = 10 log
10
P
s
P
n
+ P
d
(3)
SNR(dB)
ideal
= 6.02n + 1.76 = 61.96[dB] (4)
where n is the number of bits.
ENOB =
SINAD − 1.76
6.02
(5)
Table 3 shows the results of the ADC dynamic
specifications. Tests were performed by applying a
synthesized sine wave with a frequency of 15 Hz and
voltage range of 95% ADC full-scale range.
Table 3: Dynamic specifications of the ADC (15 Hz sine
wave; Fs = 1 kHz).
SNR [dB] SINAD [dBc] THD [dBc] ENOB [bit]
55.72 54.29 -59.80 8.73
We also evaluated the power consumption of
BITalino; tests with a LiPo battery of 850 mAh
showed the autonomy to be ≈ 17 hours in real-time
acquisition over Bluetooth with all sensors connected.
This enabled us to conclude that the system typically
has a ≈ 50 mAh load current.
4 ANALOG FRONT-END
4.1 Overview
The analog front-end integrates individual sensor
blocks for Electromyography (EMG), Electrocardiog-
raphy (ECG), Electrodermal Activity (EDA) and Ac-
celerometry (ACC); the board is also fitted with light
sensor (LUX) and LED analog blocks, to enable syn-
chronization with third-party equipment (e.g. a com-
puter screen or video camera).
The ECG sensor can be used for 1-lead measure-
ment of the bioelectrical activity of the heart and de-
rived parameters (e.g. heart rate, heart rate variabil-
ity, etc.), works both with gelled and non-gelled elec-
trodes, and can be applied in any standard location
(e.g. chest, left/right hand palms, left/right fingers)
(Silva et al., 2011).
BITalino:ANovelHardwareFrameworkforPhysiologicalComputing
249
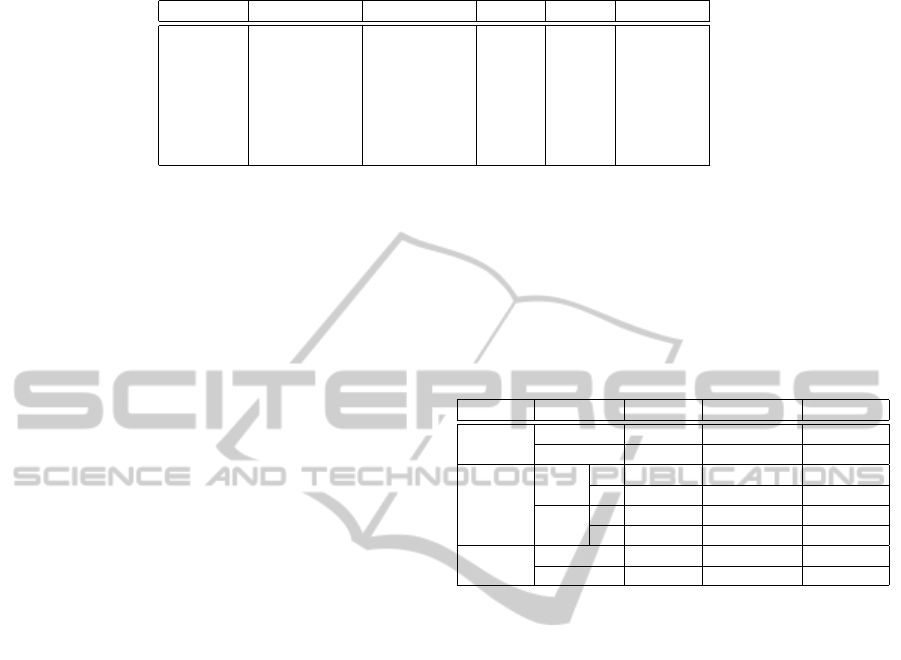
Table 4: Onboard sensor specifications.
ECG EMG EDA ACC LUX
Principle V. Diff. V. Diff. Resist. MEMS Photo Trans.
Electrodes 2 or 3 3 2 - -
Bandwidth 0.5-40 Hz 10-400 Hz 0-3 Hz 0-50 Hz -
Input Imp. 100 GΩ @ 3 pF 100 GΩ @ 3 pF - - -
CMRR 110 dB 110 dB - - -
Range 0-3 mV 0-3.3 mV 0-1 MΩ ±3 G 360-970 nm
Gain 1100 1000 2 - -
The EMG sensor can be used for measuring the
bioelectrical activity of the muscles and derived pa-
rameters (e.g. onset, duration, etc.), and can be ap-
plied to any surface muscle; the standard recommen-
dations are for the sensor to be applied with the differ-
ential electrodes centered mid-way along the muscle
belly, with a 2 cm inter-electrode spacing, and aligned
with the muscle fibers beam (Basmajian and De Luca,
1985).
The EDA sensor can be used for measuring skin
resistance; a typical use of this sensor is to assess the
sympathetic nervous system activity, in which case
the two sensor leads are applied at the hand palms
or feet, allowing the measurement of the variations in
the skin impedance originated by sweat duct secretion
activity (Boucsein, 2011).
Finally, the accelerometer can be used for mea-
suring biomechanical events (e.g. tilt, step counting,
fall detection, physical activity), and the light sensor
can be used for measuring ambient light or for op-
tical synchronization with external sources (a typical
example being the synchronization of BITalino with
content being presented in a computer screen).
Table 4 presents the specifications of the individ-
ual sensor blocks provided by default on the analog
front-end, and through which the users are able to ex-
periment with multiple biosignals.
4.2 Sensor Characterization
We characterized the dynamic specifications of the
ECG and EMG voltage differential circuits using a
synthesized sine wave with frequencies of 24 Hz and
55 Hz, respectively, 25 mV
pp
and offset of V
cc
/2.
The gain of each sensor was reduced to 100 (IN-
AMPs with unity Gain); this procedure ensured a de-
sirable output signal without saturation and ranged
between 0 − 3.3 V.
Table 5 summarizes the results of the dynamic
specifications of the the circuits of the three versions
of the BITalino (Board, Plugged and Freestyle). Fig-
ure 5 shows the frequency response of each circuit. In
the top plots, we show the time response of each cir-
cuit to a synthesized chirp wave with 1 second dura-
tion and frequencies ranging between 0 − 100 Hz (for
the ECG) and 0 − 500 Hz (for the EMG), 25 mV
pp
and offset of V
cc
/2. As expected, the output signal is
a chirp wave with attenuation at low and high frequen-
cies. The bottom plots show the frequency response.
Table 5: Dynamic specifications (ECG and EMG, Fs =
1 kHz). For the BITalino Plugged results,
∗
denotes a 10 cm
cable length while
∗∗
denotes a 100 cm cable length.
BITalino Sensor SNR[dB] SINAD[dBc] THD[dBc]
Board
ECG 37.38 37.11 -49.39
EMG 35.96 35.86 -52.03
Plugged
ECG
∗
39.39 36.58 -39.80
∗∗
34.09 32.70 -38.34
EMG
∗
34.96 34.67 -46.61
∗∗
34.49 34.21 -46.17
Freestyle
ECG 39.72 36.71 -39.72
EMG 32.03 31.95 -49.23
We also performed a transient analysis of the volt-
age differential circuits, which showed that the ECG
circuit has 2.337 seconds time delay, while the EMG
circuit has 0.146 seconds time delay. One should note
that the time delay is bounded by the time constant
(τ = RC) of the integrator network at the first stage of
the biosignal amplifier in both circuits.
To further reinforce the performance of each cir-
cuit, Figure 6 shows real-world data. For the ECG,
we used an off-the-person placement as described in
(Silva et al., 2013), while for EMG measurement we
placed pre-gelled electrodes fixed over a muscle.
Only the voltage differential sensors were revised
in the scope of our work, and as such, we refer the
reader to the work by (Guerreiro et al., 2013) for the
characterization of the remaining sensor blocks.
5 USABILITY ASSESSMENT
5.1 Methodology
A major concern in our work was the ease-of-use and
adequacy of our hardware framework within poten-
tial target user groups, reason for which we have con-
ducted a usability study. We adopted the approach
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
250
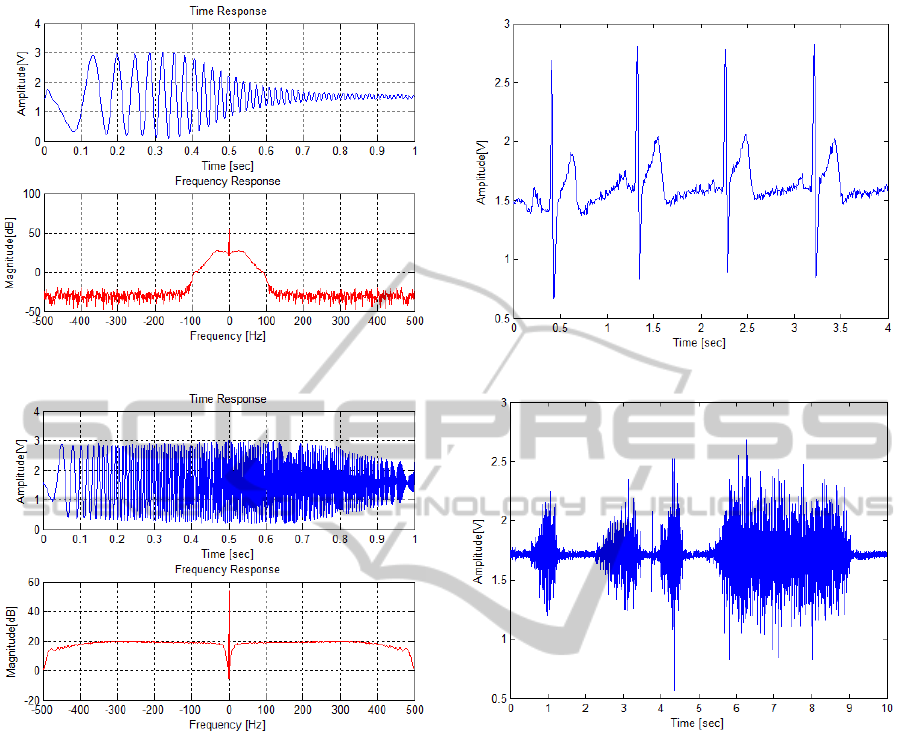
(a) Frequency response of the ECG sensor. Bandwidth be-
tween 0.5 − 40 Hz.
(b) Frequency response of the EMG sensor. Bandwidth be-
tween 10 − 400 Hz.
Figure 5: Time and frequency response of the voltage dif-
ferential sensors.
proposed by Brooke (Brooke, 1996) around the Sys-
tem Usability Scale (SUS). The SUS is composed
of a 10-item questionnaire, in which each question
is a statement that the user needs to rate on a five-
point scale that ranges from ”Strongly Disagree” to
”Strongly Agree”, and measures the subjective per-
ception of interaction with a system. The SUS items
have been developed in accordance with the effec-
tiveness, efficiency, and satisfaction criteria as de-
fined by the ISO 9241-11, and it has been widely
adopted within the engineering and usability practi-
tioners community.
As proposed by Brooke, the SUS assessment was
performed after the volunteers had contact the system
and before any debriefing or discussion. The partic-
ipants were requested to respond to all items, and to
mark the center of the scale for the items in which
they felt they were not able to respond. Furthermore,
(a) Example of an ECG signal acquired by the BITalino.
(b) Example of an EMG signal acquired by the BITalino.
Figure 6: Samples of real-world data collected with the volt-
age differential sensors.
instead of thinking about the items for a long time,
the participants were asked to record their immediate
response to each item.
We enrolled volunteers from multiple target user
groups, namely: a) Biomedical engineering (BME):
users that are familiar with electronics, computer pro-
gramming and biosignals; b) Electrical engineering
(ECE): users that are mostly familiar with electronics
and computer programming; Computer science (CS):
users that are mostly familiar with computer program-
ming; and c) Health sciences (HS): users that are fa-
miliar with biosignals but non-proficient in computer
programming nor electronics. Individual interviews
were performed with each user, and none of the vol-
unteers had previous experience with BITalino.
BITalino:ANovelHardwareFrameworkforPhysiologicalComputing
251
5.2 Experimental Results
A total of 100 volunteers were involved in the study
(BME: 25; ECE: 25; CS: 25; and HS: 25), with ages
rangin between 19 and 30 years old. Table 6 shows
the results for each SUS item in terms of mean and
standard deviation (µ ± σ), highlighting the best re-
sults in bold. The overall results suggest that our
framework is very easy to use, and that it has a fast
learning curve. Nevertheless, a few participants stated
that they would appreciate a more comprehensive
training before using the system.
Taking into account the SUS score interpretation
guidelines, BITalino not only exhibited above average
results, but it’s also an A grade system given that the
SUS scores across all groups stand above the 80.30
threshold (Brooke, 1996). As expected, BME users
presented the highest SUS scores, since they are more
familiar with the underlying principles and topics. In-
terestingly, CS users actually presented higher SUS
scores for the BITalino than ECE users; this may be
due to the fact that ECE users have a stronger back-
ground on hardware, leading their evaluation to be
more meticulous. Another interesting finding were
the high ratings of all users regarding the frequency
and ease of use of the system, which we interpret as
an indicator that a hardware framework such as the
BITalino is indeed necessary.
6 CONCLUSIONS
Affordable instrumentation has been a fundamental
problem in the field of physiological computing for
many years, and while the state-of-the-art is rich in at-
tempts to provide sensors and systems, no single work
found to date has provided a comprehensive and reli-
able solution.
In this paper we presented the BITalino, a low-cost
all-in-one hardware framework that has a basic set of
multimodal sensors, enabling anyone to easily inte-
grate biosignal acquisition in their projects and appli-
cations. Our work builds on previous research from
our group to provide a novel purpose-built hardware
framework for physiological computing. Experimen-
tal results related both with the benchmarking of the
BITalino hardware blocks and usability assessment
demonstrate its suitability for the intended applica-
tion.
Future work will be mainly focused on the cre-
ation of a bootloader capable of enabling people to
upload custom firmware to the control block and also
on creating additional sensors for other modalities.
Table 6: Ranking for each SUS item in terms of mean
(µ) and standard deviation (σ). The rating is on a five-
point scale ranging from ”Strongly Disagree” to ”Strongly
Agree”.
Item
BITalino
BME ECE CS HS
I think that I would like to use this system frequently 4.48 ± 0.65 4.00 ± 0.75 4.12 ± 0.73 4.31 ± 0.68
I found the system unnecessarily complex 1.32 ± 0.48 1.73 ± 1.08 1.56 ± 0.96 1.42 ± 0.50
I thought that the system was easy to use 4.84 ± 0.37 4.73 ± 0.45 4.44 ± 0.71 4.62 ± 0.57
I think that I would need the support of a technical person to be able to use this system 1.60 ± 0.76 1.65 ± 0.85 1.60 ± 0.87 2.12 ± 1.03
I found the various functions in this system were well integrated 4.28 ± 0.68 4.19 ± 0.80 4.40 ± 0.58 4.08 ± 0.63
I thought there was too much inconsistency in this system 1.28 ± 0.46 1.54 ± 0.90 1.48 ± 0.71 1.46 ± 0.58
I would imagine that most people would learn to use this system very quickly 4.60 ± 0.50 4.69 ± 0.55 4.72 ± 0.54 4.15 ± 0.78
I found the system very cumbersome to use 1.40 ± 0.58 1.65 ± 0.75 1.48 ± 0.82 1.69 ± 1.01
I felt very confident while using the system 4.32 ± 0.63 4.19 ± 0.69 4.32 ± 0.69 3.85 ± 0.78
I needed to learn a lot of things before I could get going with this system 1.84 ± 0.94 1.65 ± 0.98 1.52 ± 0.65 1.92 ± 0.80
SUS Score: 87.70 ± 9.87 83.94 ± 11.67 85.90 ± 10.68 80.96 ± 12.19
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
252

ACKNOWLEDGEMENTS
This work was partially funded by Fundac¸
˜
ao para
a Ci
ˆ
encia e Tecnologia (FCT) under the grants
PTDC/EEI-SII/2312/2012, SFRH/BD/65248/2009
and SFRH/PROTEC/49512/2009, whose support the
authors gratefully acknowledge. The team would
also like to thank for their support in the validation
and specification of requirements to: Prof. S
´
ılvia
Ouakinin, Marco Torrado and Susana Eus
´
ebio from
the Medical Faculty of the University of Lisbon; Prof.
Marta Aires-de-Sousa and Prof. Nuno Raposo from
the Cardiopneumology Department of the Health
School of the Portuguese Red Cross; and Dr. Andreas
Keil from the Center for the Study of Emotion and
Attention of the University of Florida.
REFERENCES
Alves, A., Silva, H., Lourenc¸o, A., and Fred, A. (2013).
BITalino: A biosignal acquisition system based on
the Arduino. In Proc. of the 6th Int’l Conf. on
Bio-Inspired Systems and Signal Processing (BIOSIG-
NALS), pages 261–264.
Banzi, M. (2009). Getting Started with Arduino. Make
Books.
Basmajian, J. V. and De Luca, C. J. (1985). Muscles
Alive: Their Functions Revealed by Electromyogra-
phy. Williams & Wilkins.
Boucsein, W. (2011). Electrodermal Activity. Springer.
Brooke, J. (1996). Sus: A quick and dirty usability scale.
In Jordan, P. W., Thomas, B., Weerdmeester, B. A.,
and McClelland, I. L., editors, Usability Evaluation in
Industry, pages 189–194. Taylor & Francis., London.
Buechley, L. and Eisenberg, M. (2008). The LilyPad Ar-
duino: Toward wearable engineering for everyone.
IEEE Pervasive Computing, 7(2):12–15.
Guerreiro, J., Martins, R., Silva, H., Lourenc¸o, A., and Fred,
A. (2013). BITalino: A multimodal platform for phys-
iological computing. In Proc. of the 10th Int’l Conf.
on Informatics in Control, Automation and Robotics
(ICINCO), pages 500–506.
Johansson, F. (2006). The Medici Effect: What Elephants
and Epidemics Can Teach Us About Innovation. Har-
vard Business Review Press.
O’Sullivan, D. and Igoe, T. (2004). Physical Comput-
ing: Sensing and Controlling the Physical World with
Computers. Thomson.
Silva, H., Carreiras, C., Lourenc¸o, A., and Fred, A. (2013).
Off-the-person electrocardiography. In Proc. of the
Int’l Congress on Cardiovascular Technologies (CAR-
DIOTECHNIX).
Silva, H., Lourenc¸o, A., Lourenc¸o, R., Leite, P., Coutinho,
D., and Fred, A. (2011). Study and evaluation of a sin-
gle differential sensor design based on electro-textile
electrodes for ECG biometrics applications. In Proc.
of the IEEE Sensors Conf., pages 1764 – 1767.
BITalino:ANovelHardwareFrameworkforPhysiologicalComputing
253
