
Improving GSM-based Sheep Tracking
Using a Cluster-based Multi-hop Approach
Ragnar Stølsmark and Erlend Tøssebro
Institute of Electrical Engineering and Computes Science, University of Stavanger, Stavanger, Norway
Keywords: Sheep Tracking, Wireless Sensor Networks, GSM Coverage.
Abstract: This paper presents a novel sheep tracking algorithm. The current market leading solution, Telespor,
performs poorly in situations with low GSM coverage. The algorithm presented here tries to improve the
performance of Telespor in low GSM coverage scenarios by using a multi-hop approach for data retrieval. It
also uses a cluster-based technique to improve cost and energy consumption. To test the algorithm,
simulations were performed based on data collected from a flock of more than 450 sheep. These simulations
show that the new algorithm outperforms Telespor in scenarios with low GSM coverage. It also show that it
is possible to get a good ratio of successful updates even with a relatively small amount of full feature
nodes. This indicates that the algorithm is an improvement also in terms of cost and energy consumption.
1 INTRODUCTION
Animal tracking has been a popular research topic
for years and the combination of GPS and GSM
technologies revolutionized the field. In areas with
low GSM coverage this tracking method has an
obvious shortcoming. In this paper we study a case
where low GSM coverage is common: Sheep
tracking in Norwegian mountains.
1.1 Norwegian Sheep Farming
Sheep farming in Norway differs from many other
countries in that the sheep are not used as milk
producers, but solely kept for their meat. The
farming is season-based. In the spring new lambs are
born. During the summer the sheep and the lambs
are sent into the mountains to graze. There are two
main reasons for this. First, getting the sheep away
from the farm pastures allows the grass to grow so
that it can be harvested and used as winter fodder.
Secondly, as shown in (Zervas, 1998) it is important
to optimize the grazing. The first spring grass is
more nutritious than the grass that grows later in the
summer season. As spring progresses, a higher
altitude is needed to reach this grass and therefore it
is better for the sheep to spend the summer in the
mountains. In autumn the sheep and lambs are
collected. The lambs that are not kept for breeding
purposes are then slaughtered. The rest are kept on
the farm throughout the winter.
1.2 The Need for Sheep Tracking
Collecting the sheep after the summer season is the
most difficult part of sheep farming. It is highly time
consuming, as it traditionally involves hiking
through difficult terrain looking for the sheep in
what is, by the farmer’s experience, considered
likely locations. Finding the last few sheep is also a
problem. Almost every year some sheep die. Dead
sheep lie down and are therefore notoriously hard to
locate. Unless the farmer finds them, it will be
impossible to know if they are dead or simply
missing. This results in an extensive search relying
mostly on luck and experience. These problems have
been impossible to solve until recent years.
In the last 10 years, cheaper GPS technology
combined with the expansion of GSM networks
have made it possible to track the grazing sheep. A
commercial solution called Telespor has been
available for a few years. Telespor is based on the
Electronic Shepherd research project (Thorstensen et
al., 2004) and is more closely described under the
related work section of this paper. Telespor has
managed to become quite popular and currently has
approximately 30 000 units fitted on sheep and other
domestic animals across the country. The success of
Telespor comes from a combination of factors. They
381
Stølsmark R. and Tøssebro E..
Improving GSM-based Sheep Tracking - Using a Cluster-based Multi-hop Approach.
DOI: 10.5220/0004730903810388
In Proceedings of the 3rd International Conference on Sensor Networks (SENSORNETS-2014), pages 381-388
ISBN: 978-989-758-001-7
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

were the first commercial solution and time has
become much more valuable to people over the last
decade. In Norway there is not much money in
sheep farming, therefore many farmers keep sheep
as a hobby. They have money from their other job,
but not much spare time. They are therefore willing
to spend some of that money to save time on their
sheep farming hobby. Our goal for this project was
to see if we could improve GSM coverage, cost or
battery life of sheep tracking networks. Our main
focus has been on GSM coverage as this is the most
pressing issue. To improve the current solution we
have created a new sheep tracking algorithm which
combines techniques for multi-hop routing and
clustered networks. This algorithm has then been
compared with Telespor using a simulator based on
real sheep data collected by a sheep farmer with 470
sheep.
The paper is structured as follows: Section 2 lists
related work with a special focus on the current
Telespor solution. Section 3 covers our new sheep
tracking algorithm. Section 4 details the sheep data
the simulation was based on, as well as the metrics
we have used and the results we achieved. Section 5
consist of a discussion of the new algorithm versus
Telespor. Section 6 concludes this paper.
2 RELATED WORK
2.1 Animal Tracking
Animal tracking and habitat monitoring has received
a lot of research attention. In Oxford, a team of
scientists have been monitoring badger behaviour
(Dyo et al., 2010). They equipped the badgers with
magnets to track them inside their burrows. Sensors
above ground measured disturbance in magnetic
fields caused by the badger magnets. Researchers in
Maine (Polastre et al., 2004) applied wireless sensor
networks techniques when they monitored the
behaviour of seabirds on a remote island. They
installed sensor nodes in the bird nests and returned
data via a central base station placed on the island.
This technique is a static version of the technique
applied in the algorithm described in this paper.
In (Stølsmark and Tøssebro, SENSORCOMM
2012), we presented an algorithm for sheep tracking.
This algorithm has a cluster-based approach
allowing some of the sheep to carry cheaper nodes
and still report their location through full feature
nodes. They found that this solution reduced the
average energy consumption of the sheep nodes
since only the leader in a cluster needed to use GPS.
This approach is also used in the algorithm
presented in this paper. In our system, we improve
on the cluster-based approach by adding a multi-hop
position retrieval method to extend GSM coverage.
This multi-hop approach is inspired by the
promising results we achieved in (Stølsmark and
Tøssebro, ECUMICT 2012). We also studied the
possibility of using RSSI triangulation as an
alternative way to locate sheep (Stølsmark and
Tøssebro, SENSORNETS 2012). The results were
disappointing and that is the reason we have chosen
not to pursuit this approach in our sheep tracking
algorithm.
2.2 Telespor
Telespor is the current market leading sheep tracking
solution. In the Telespor system, the sheep carry
nodes with GPS and GSM-capabilities. The nodes
find their own position using GPS and report this
position to the Telespor server via the GSM
network. The sheep farmer can then watch the
location of their sheep on a web application.
Through this application, the farmer also has access
to advanced features such as adjusting the update
interval. Lately Telespor has added a cheaper short
(a few meters) range lamb node. This node reports
via the sheep node and has no GPS or GSM
functionality. The purpose of the lamb node is to let
the farmer know that lambs are with their sheep
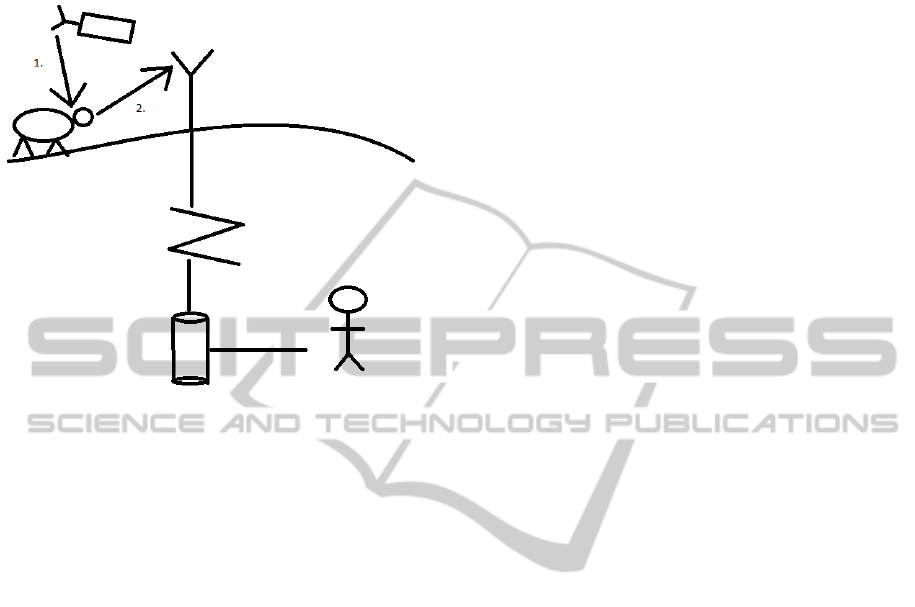
mothers. Fig. 1 illustrates the Telespor system. In
step 1 the sheep node receives a GPS position from
the GPS satellites. In step 2 the node sends that
position to the Telespor server via the GSM
network.
2.2.1 Problems with the Telespor Solution
The Telespor system is far from perfect. In a
research project (Haugset and Nossum, 2010)
farmers tested the system during a summer. The
biggest problem was the lack of GSM coverage as
the sheep were grazing in rural mountainous areas.
A few of the farmers reported that sheep could be
outside GSM coverage for weeks at a time. Another
issue is with the cost of the units. One full GPRS
node costs approximately € 200. This is so
expensive that few farmers take the cost of
equipping all their sheep with tracking units. They
put them on a few sheep instead and hope they will
be representative for the rest of the flock. This helps
in locating part of the flock but the problem of
finding the last few sheep persists. Battery life could
also be improved. The longer the battery life, the
SENSORNETS2014-InternationalConferenceonSensorNetworks
382
more location updates a tracking unit can report.
Especially in the collection phase frequent updates is
important.
Figure 1: The Telespor system.
3 SHEEP TRACKING
ALGORITHM
3.1 Problem Definition and Goals
The purpose of a sheep tracking network is to inform
the farmer of where his sheep are or have been at a
given time. It should be as cheap as possible so that
the farmer can afford it. The network needs to work
in areas with varying GSM coverage. It also needs to
be sturdy enough to handle the rough treatment it
gets from hanging around the neck of a sheep for a
few months. Waterproofing is a must since the sheep
tracking nodes are exposed to the elements, which in
a typical Norwegian summer includes a lot of rain.
The network must be able to work unattended for at
least 100 days since it should not require the farmer
to visit his sheep mid-season. This makes energy
consumption important, as the farmer should not
have to walk to his sheep to change batteries. The
algorithm should be as energy-efficient as possible
since the energy savings can be used to improve the
sheep tracking nodes in three ways:
Smaller batteries could be fitted, decreasing the
weight and size of the nodes, thereby
increasing animal comfort. This would also
reduce the price of each unit.
The tracking season could be prolonged. This
could make it attractive for tracking of other
animals.
The update frequency could be increased,
making it more useful for the farmer.
A sheep tracking network needs a localization
method. The industry standard is GPS. However,
GPS comes with a few disadvantages. It has a high
energy consumption and it adds cost to the nodes.
Therefore, it could be beneficial to combine GPS
with another solution so that not all of the sheep
needs to be equipped with GPS or that not all of
them need to use it for every position update.
To save energy the algorithm must have duty-
cycling between a low power consumption sleep
state and an active position update state. If the
network should have any internal interaction
between nodes, this duty-cycling needs to be
synchronized. Synchronization is easily achievable
through GPS and is an argument for using GPS in at
least some of the nodes.
A typical sheep flock range from 10 – 1000
sheep per farmer. Therefore an algorithm needs to be
scalable up to those numbers. It also needs to handle
the range between sheep. They typically spread out
in small flocks over a large area. It is not unusual for
the sheep to graze over a 10 x 10 km area. This area
is typically covered by mountains making it far from
ideal wireless conditions. The sheep are mostly at a
high altitude making the network susceptible to fog
and further decreasing the achievable transceiver
range. These are the conditions and environment a
new sheep tracking algorithm has to deal with.
When designing our algorithm we had these
application-specific issues in mind.
3.2 Proposed Solution
Fig 2 show an illustration of the new sheep tracking
algorithm we have created. When sheep are alone it
works in a similar fashion as the Telespor algorithm,
with the addition of a small delay. This delay is part
of the network discovery process where the sheep
nodes wait for messages from other sheep in the
vicinity. After this delay, a lone sheep will send a
position message over the GSM network to the
sheep server. It will then sleep until the next update
time. As we see it, it is hard to make any algorithm
improvements to the solitary sheep situation.
Therefore, we have focused on improving the
algorithm in situations where there are a flock of
sheep within a small area. Since sheep often travel in
small flocks this is a realistic scenario. This has lead
us to a cluster-based multi-hop solution, more
closely described in section 3.2.1 and 3.2.3.
ImprovingGSM-basedSheepTracking-UsingaCluster-basedMulti-hopApproach
383
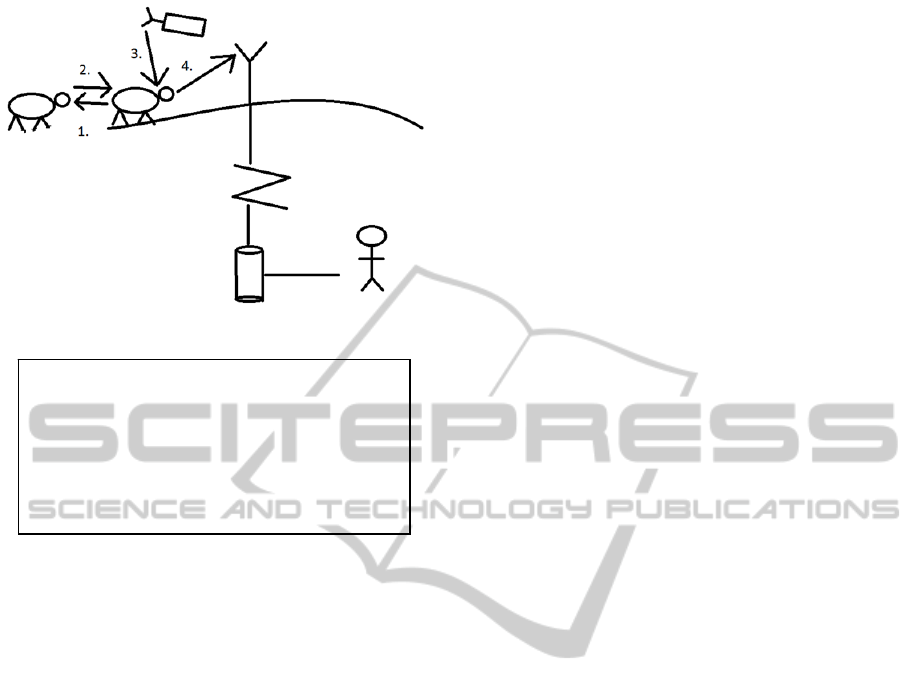
Figure 2: Distributed Algorithm.
3.2.1 Cluster-based Localization
The algorithm divides the sheep into clusters. This is
based on the observation of the way that sheep
farmers think when speaking of sheep’s locations.
They are not interested in the position of each
individual sheep, rather they think in terms of
clusters. The farmers want to know the position of
each cluster and which sheep are in the different
clusters.
To take advantage of this cluster-based thinking
our algorithm will report only one position per
cluster. Together with this position the id of all
sheep currently in that cluster are also transmitted
back to the server. This way the farmer can get the
information he is interested in while at the same time
creating a more efficient network. The efficiency
comes in the form of energy-saving, since only a
few sheep has to use GPS to calculate its position. It
also reduces cost since some of the nodes can be
without GPS and GPRS modules. These nodes will
not be able to report their position on their own, only
as part of a cluster. As there is no point in only
having the non-GPS nodes, there exists a trade-off
between network cost and having a functional
network. The denser the sheep flock is, the higher
percentage of non-GPS nodes one can have in the
network without risking too many lost updates.
The algorithm does the clustering in a distributed
manner. Each cluster is within a single network hop
from the sheep that is the cluster head and has a cut-
off based on the received signal strength (RSSI).
Messages coming from sheep with a low RSSI are
ignored. This is because we do not want to make the
clusters too big. RSSI is used as an indicator of
distance. Our previous research (Stølsmark and
Tøssebro, SENSORNETS 2012) has shown that
there is a far from perfect relationship between RSSI
and distance in hilly terrain, however for this
application it is sufficient.
The cluster head will be determined for each
position update by the following method:
1. Each sheep will calculate a delay based on the
formula in listing 1. This gives a delay that is
longer for those sheep with low battery power
and those without GSM coverage will get an
even longer delay.
2. If no cluster head message is received by a
node before the delay expires, they will
become a cluster head.
3. On becoming a cluster head they will send out
a cluster head message to the other sheep in
their vicinity making them part of their cluster.
Once a cluster head is chosen the followers will send
their id to the cluster head and the cluster head will
find its own position using GPS and transmit it,
using the multi-hop approach described in section
3.2.2, along with the id of the cluster members to the
server.
If(Sheep has no GSM coverage){
1
∗
}Else{
1
∗
}
Listing 1: Calculate cluster head delay
3.2.2 Multi-Hop Transmittal of Position
The transmittal of the sheep position back to the
server uses a multi-hop approach to maximise GSM
coverage. This occurs in a three-step process.
First every cluster head that does not have GSM
coverage broadcast their position and cluster
members to everyone within their radio distance.
This could be to more sheep than are in their cluster,
as there is no specific RSSI or distance limit to this
broadcast.
The next step is the wait and forward phase. In
this phase that occurs for a predetermined time,
every node in the network that is not a cluster head
or does not have GSM coverage, forwards the
messages they receive. Those cluster heads that have
GSM coverage stores the messages they receive.
Le
g
end:
1. Broadcast cluster-head message
2. Send identity to cluster-head
3. Cluster-head receives GPS-
position
4. Send identities and GPS-
position to server via GSM
SENSORNETS2014-InternationalConferenceonSensorNetworks
384

The third step is that all cluster heads within GSM
coverage send the position messages they have
stored (including their own) to the server. It is
important to note that the way cluster heads are
selected, via the delay function, ensures that a
cluster cannot have a cluster head without GSM
coverage unless all cluster members are without
coverage.
3.2.3 Complete Solution
Algorithm 1 gives an overview of the complete
solution.
On Every Update {
delay = Calculate delay
Sleep(delay)
If(No leader message received){
Notify Neighbours of leadership
Leader = true
}Else{
Send identity to leader
Leader = false
}
If(Leader){
Find GPS Position
}
While(time < Synch Time){
If(Leader && has GSM Coverage){
Store received messages
}Else if(Leader){
Send own position and
follower identities to other
nodes.
Forward new received
messages to other nodes
}else{
Forward new received
messages to leader
}
}
If(Leader && has GSM Coverage){
Send stored messages to base station
Send own position and follower
identities to base station
}
Sleep until next update
}
Algorithm 1: The Distributed Sheep Tracking Algorithm
3.2.4 Hardware Requirements
We have focused on the software side of the solution
in this project. However our software has some
hardware requirements. Each sheep node must have
Wireless transceiver
Processor
Ram
Duty-cycling capabilities
In addition each leader node must have:
GPS receiver
GSM transceiver
4 SIMULATION SETUP AND
RESULTS
To compare our algorithm with Telespor we ran a
series of simulations measuring metrics in a realistic
scenario.
4.1 Simulation Data
The simulation is based on data collected by a
farmer using Telespor on his sheep flock during the
2010 season. The flock consisted of 473 sheep and
was located outside the town of Steinkjer in
Trøndelag, Norway. The area the sheep grazed in
can be seen on the map in figure 4. This area
represents a typical Norwegian sheep grazing area. It
is rural, mountainous and has few trees due to its
elevation.
The data consisted of 389622 measurements. The
area the sheep grazed in measured 33 km between
the two points that was the furthest from each other.
Each measurement included the following data:
Time and date of the measurement
Sheep id
Measured position (latitude and longitude)
GSM signal strength
We checked the GSM coverage in the area using the
sheep measurements to create coverage maps. The
maps can be seen in Fig. 3, 4 and 5. These maps
were made by colouring the areas where the
Telespor nodes measured a GSM signal over a
certain threshold. The threshold was low in fig. 3,
medium in fig. 4 and high in fig. 5. These maps
correspond to the low, medium and high GSM
coverage scenarios we have used in the simulations.
4.2 Simulation Setup
We wrote a custom simulator in Java specifically for
this project. The simulator simulates both GSM
coverage and sheep movement. GSM coverage is
simulated based on the values reported by the sheep
nodes in the data set. For a given position the GSM
coverage value would be calculated as a weighted
ImprovingGSM-basedSheepTracking-UsingaCluster-basedMulti-hopApproach
385

Figure 3: Low GSM coverage map.
Figure 4: Medium GSM coverage map.
Figure 5: High GSM coverage map.
average of the GSM signal measurements recorded
in the dataset within a 2000 m radius. The
measurements would be weighted based on how
close they were to the actual position. A position
would be considered as having GSM coverage if this
weighted average was above the coverage threshold
defined in the simulation scenario.
Sheep movement is simulated based on the
dataset we received. The sheep report their position
once per day in our simulator. Their position at the
update time is calculated by interpolating the sheep
position between the previous and next position
recorded in the dataset.
For every update the sheep ran either Telespor or
the new distributed algorithm. When the algorithm
was finished, energy was removed from the battery
based on which role (follower or leader) the sheep
had in the algorithm. Those sheep that ran out of
energy would be removed from the next algorithm
iterations. Simulation metrics were recorded at the
end of each iteration. Time would then advance one
day to the next update. This would continue until the
end of the recorded sheep grazing season. The
simulation parameters are listed in table 1.
Table 1: Simulation parameters.
Parameter Value
N
umber of sheep 473
Antenna ran
g
e 505 m (σ = 170 m)
Cluster range limit 300 m (σ = 100 m)
Update interval 1 da
y
Simulation duration 61 da
y
s
4.3
Simulation Metrics
Our simulation metrics are based on what we
consider the most important aspects of a sheep
tracking system. The primary factor we have looked
at is improving GSM coverage. This is one of the
biggest problems with the current solution and also
the main focus we had when designing our
algorithm. As a metric for coverage we have used
the number of missed position updates divided by
the total number of updates. A position update is
considered as missed when using the Telespor
algorithm if the sheep is outside GSM coverage at
the time of transmittal. When using our algorithm an
update is considered as missed if there is no way to
transmit the update directly, or via other sheep.
Full feature nodes are more expensive than
Telespor nodes since they also need to have a
wireless transceiver. The transceiver is used for
communication with other sheep. In our system, we
also have a simpler node type that is unable to send
any position updates without being near a full
feature node. These simpler nodes are cheaper than
Telespor nodes since they do not have GSM and
GPS. The full feature node ratio is therefore
important to determine the most cost effective
system. In the simulations, we have looked at how
small this ratio can be without causing too many
missed updates from the simple nodes in different
scenarios. We have also looked at what our nodes
must cost to have a similar overall cost as Telespor.
SENSORNETS2014-InternationalConferenceonSensorNetworks
386

Table 2: Missed update ratio (percent).
Al
g
orithm
GSM covera
g
e Telespor Distributed
Algorithm (100% full
feature nodes)
D. A.
80%
D. A.
60%
D. A.
40%
D. A.
20%
Low 71.89 0.00 0.00 0.00 0.00 0.02
Mediu
m
43.08 0.00 0.00 0.00 0.00 0.02
High 33.77 0.00 0.00 0.00 0.00 0.02
The final metric we have looked at is energy
consumption. This should be as low as possible to
allow for the maximum number of updates. Just like
the cost metric, the full feature nodes in our system
use more power than Telespor and the simpler nodes
use less power. The main saving point for the
simpler nodes is that they do not use GPS. GPS
positioning is one of the main energy consumers in
our system and therefore the energy saving potential
is substantial. The full feature nodes will use slightly
more energy than a normal Telespor node due to the
communication with the other sheep. We use a
previous analysis of a similar system to make a
prediction of the energy consumption of the new
solution.
4.4 Simulation Results
4.4.1 Coverage
Table 2 displays the missed update ratio for the
different scenarios. Please note that these numbers is
based on the simplified assumption that all GSM
nodes within GSM coverage can send their updates
back to the server. This is a fair assumption as the
sheep could resend their messages if packet loss
occurred. As the results show, the coverage was
vastly improved by the distributed algorithm. The
reason for this improvement is the multi-hop
message forwarding. Since the sheep forward their
position using the full antenna range of 505 meters,
a message can travel long distances using multiple
hops. Even with just 20 % full feature nodes, only a
few updates were lost. This is possible because the
cheaper nodes also forward position messages. This
means that in a normal sheep flock, it might be
enough to have a single sheep with GSM coverage.
As an example, Telespor has between 33 and 72 %
missed updates with the same sheep positions. This
means that in the worst scenario, 28% of the sheep
had GSM coverage, with 20 % full feature nodes
there will be an average of 26 sheep with GSM
coverage. This is more than enough to provide
excellent coverage. The improvement was greater
than expected from our results in (Stølsmark and
Tøssebro, ECUMICT 2012). This is probably
because the real world data has better clustering
characteristics than the random placement algorithm
used by the simulator in the other paper. That
simulator placed sheep either randomly or in the
exact same position (cluster). The truth is that sheep
walk in clusters, but individual sheep in a cluster
still spread out over an extensive area.
4.4.2 Cost and Energy Analysis
We have performed a cost analysis based on the
price of the Libelium Waspmote nodes we have
previously used for sensor network testing. A node
with the same features as Telespor cost 235 €. A full
feature distributed algorithm node cost 250 €. A
simple node cost 150 €. Given these prices, the
distributed algorithm would have the same price as
Telespor with a ratio of 80 % full feature nodes.
With 20% full feature nodes the cost would be
reduced by almost 30%. This means that the farmer
can choose to save money at the expense of
localization accuracy. These numbers are meant as
an illustration, in a real setting, mass production of
standardized nodes would decrease their price
significantly.
We performed an energy analysis for a similar
system in (Stølsmark and Tøssebro,
SENSORCOMM 2012). There we found that the
energy consumption could be reduced by as much as
50 % by using cluster-based localization. The drastic
reduction is possible because GPS localization is an
energy-intensive activity. In a n sheep cluster, each
sheep only need to use the GPS on 1/n of the
position updates. The cluster-based part of the
algorithm therefore saves energy. The multi-hop part
will use more energy than Telespor due to the way
messages are delivered. The power consuming
broadcast function is only used in scenarios with low
GSM coverage. The distributed algorithm will
therefore in most situations outperform Telespor
when it comes to energy consumption.
ImprovingGSM-basedSheepTracking-UsingaCluster-basedMulti-hopApproach
387

5 DISCUSSION
The substantial improvement in coverage shown in
the simulation results leads to many interesting
possibilities. The network can be tailored to suit
almost every situation. A farmer can choose to
reduce cost at the expense of accuracy. Another
example is a farmer who knows his sheep is in an
area with poor GSM coverage. He can then choose
to increase the number of GSM nodes. This will
increase the probability that one of them is in an area
with coverage.
The cluster-based approach may seem similar to
the Telespor lamb and sheep node solution. The
difference lies in the range. The Telespor sheep node
has a range of a few meters compared to the cluster
range limit of 300 meters used in the simulations
presented here. This makes it possible to have much
larger clusters, reducing cost and energy
consumption significantly. The lamb and sheep node
solution does not have any communication between
sheep (cluster heads). This makes our algorithm
more suitable for low GSM-coverage scenarios,
since it benefits from message forwarding.
The simulation results are promising, but there
are some scenarios where even the multi-hop
approach will not work. The typical situation
involves a sheep straying away from the rest of the
flock and staying in an area with no GSM coverage.
This situation is impossible to improve without a
different localization method. A possible solution for
these situations could be satellite communication.
The energy consumption is a concern in
scenarios with low GSM coverage. Nodes can still
benefit from the cluster-based localization, but will
spend a lot of energy forwarding messages. We are
certain that farmers would still prefer using that
extra energy on knowing the location of their sheep.
If a sheep is walking into an area with low GSM
coverage it could mean it is straying away from the
rest of the flock, making it important to know where
it is heading.
6 CONCLUSIONS
The new distributed sheep tracking algorithm is a
vast improvement over Telespor in low GSM
coverage scenarios. In a scenario where only 1 in 4
Telespor updates reaches its destination, the
distributed sheep tracking algorithm has almost no
missed updates. The cluster-based approach means
farmers will still be able to tell where their flocks
are, but makes it possible to reduce energy
consumption and cost considerably. This system
therefore address the two primary concerns sheep
farmers have with the current system, cost and
coverage.
ACKNOWLEDGEMENTS
Egil Magnus Pettersen in Telespor for providing
sheep testing data.
REFERENCES
Dyo V., Ellwood S. A., Macdonald D. W., Markham A.,
Mascolo C., Pásztor B., Scellato S., Trigoni N.,
Wohlers R. and Yousef K., 2010. Evolution and
sustainability of a wildlife monitoring sensor network.
Proc. of the 8th ACM Conference on Embedded
Networked Sensor Systems (SENSYS ‘10), 127-140,
ACM.
Haugset A. S., and Nossum G., 2010. Erfaringer med bruk
av elektronisk overvåkningsutstyr på sau i 2010. Notat
2010:17 Trøndelag Forsking og Utvikling AS.
Polastre J., Szewczyk R., Mainwaring A., Culler D. and.
Anderson J., 2004. Analysis of wireless sensor networks
for habitat monitoring. Wireless Sensor Networks,
399-423, Springer.
Stølsmark R., Tøssebro E., 2012. Can a multi-hop solution
improve GSM coverage for tracking networks
ECUMICT 2012. 95-106. Nevelland.
Stølsmark R., Tøssebro E., 2012. Reducing Energy
Consumption in a Sheep Tracking Network Using a
Cluster-based Approach. SENSORCOMM 2012. 129-
135. IARIA.
Stølsmark R., Tøssebro E., 2012. Uncertainty in
Trilateration. Is RSSI-based Range Estimation
Accurate Enough for Animal Tracking?
SENSORNETS 2012. 237-241. ScitePress.
Thorstensen, B., Syversen, T., Bjørnvold, T. A., Walseth,
T., 2004. Electronic Shepherd – a low cost, low.
bandwith, wireless network system. Mobisys ’04.
Proceedings of the 2nd international Conference on.
Mobile Systems, Applications, and Services. 245-255.
ACM.
Zervas, G., 1998, Quantifying and optimizing grazing
regimes in Greek mountain systems. Journal. of
Applied Ecology, 35, 983-986, Wiley.
SENSORNETS2014-InternationalConferenceonSensorNetworks
388
