
Learning Weighted Joint-based Features for Action Recognition using
Depth Camera
Guang Chen
1,2
, Daniel Clarke
2
and Alois Knoll
1
1
Robotics and Embedded Systems, Fakult
¨
at f
¨
ur Informatik, Technische Universit
¨
at M
¨
unchen, M
¨
unchen, Germany
2
fortiss GmbH, An-Institut Technische Universit
¨
at M
¨
unchen, M
¨
unchen, Germany
Keywords:
Unsupervised Learning, Weighted Joint-based Features, Action Recognition, Depth Video Data.
Abstract:
Human action recognition based on joints is a challenging task. The 3D positions of the tracked joints are very
noisy if occlusions occur, which increases the intra-class variations in the actions. In this paper, we propose a
novel approach to recognize human actions with weighted joint-based features. Previous work has focused on
hand-tuned joint-based features, which are difficult and time-consuming to be extended to other modalities. In
contrast, we compute the joint-based features using an unsupervised learning approach. To capture the intra-
class variance, a multiple kernel learning approach is employed to learn the skeleton structure that combine
these joints-base features. We test our algorithm on action application using Microsoft Research Action3D
(MSRAction3D) dataset. Experimental evaluation shows that the proposed approach outperforms state-of-the-
art action recognition algorithms on depth videos.
1 INTRODUCTION
With the recent advent of the low-cost sensors such
as Kinect, depth cameras have received a great deal
of attention from researchers. It triggered significant
attention to revisit problems such as object detection
and action recognition using depth videos.
Compared to the visible light camera, depth sen-
sor has several advantages. For example, depth im-
age provides 3D structural information of the scene,
which can often be more discriminative than color
and texture in many applications including detection,
segmentation and action recognition. Moreover, the
depth camera can wok in different lighting conditions.
These advantages have facilitated a rather powerful
human motion capturing technique (Shotton et al.,
2011) that generate the 3D joint positions of the hu-
man skeleton. However, simply using such 3D depth
data and the estimated 3D joint positions for human
action recognition is not plausible. One reason is that
the estimation of the 3D joints positions may not reli-
able when the human body is partly in view such as a
hand touching another body part, two hands crossing,
bending the back, etc.
In action recognition, which is the topic of this
paper, two significant aspects arise when using the
depth sequences. First, the performance of adopt-
ing conventional color-based methods is unknown.
The depth images are often contaminated with un-
defined depth points, which appear in the sequences
as spatially and temporally discontinues black holes.
Furthermore, there is no texture in the depth data.
Hence, the discrimination of the depth video data
is considered doubtful. These hinder the extending
of the hand-designed features from color-based data
to depth data, such as STIP (Laptev, 2005), HOF
(Laptev et al., 2008) and HOG (Dalal and Triggs,
2005).
Second, with the release of depth sensors and the
associated SDK, we are able to obtain 3D positions
of the joints in real time. This arises one question:
will the noisy human skeleton data perform well in
action recognition? Skeleton data are able to provide
additional body part information to differentiate ac-
tions. For instance, it was recently shown in (Yang
and Tian, 2012) that for the action recognition, they
proposed a type of features by adopting the differ-
ences of joints in both temporal and spatial domains
to explicitly model the dynamics of individual joints
and the configuration of different joints.
Our work in this paper proceeds along this direc-
tion. We propose a novel human action recognition
approach using a depth camera. Fig. 1 demonstrates
the depth images with 20 extracted body joints of each
depth map for actions Golf Swing, Hand Clap, Draw
X, Draw Tick, High Throw and Jogging. The basic
549
Chen G., Clarke D. and Knoll A..
Learning Weighted Joint-based Features for Action Recognition using Depth Camera.
DOI: 10.5220/0004735705490556
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 549-556
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

(a) Golf Swing (b) Hand Clap
(c) Draw X (d) Draw Tick
(e) High Throw (f) Jogging
Figure 1: The sequences of depth maps and skeleton for different action classes. Each depth image includes 20 joints.
idea is illustrated in Fig. 2. We provide an unsuper-
vised learning method to learn the joint-based features
inspired by (Hyvrinen et al., 2009; Le et al., 2011).
At the heart of our method is the use of the Inde-
pendent Subspace Analysis (ISA). ISA algorithm is
a well-known algorithm in the field of natural image
statics (Hyvrinen et al., 2009). Experimental studies
have shown that this algorithm can learn powerful fea-
tures from static image or color-based sequences. An
advantage of ISA is that it learns features that are ro-
bust to local translation while being selective to ro-
tation and velocity. A disadvantage of ISA is that it
can be slow to train when the dimension of the in-
put data is large e.g video data. In this paper, we ex-
tend the ISA algorithm to the depth video data. In-
stead of training the model with the full video, we
apply the ISA algorithm to the local region of joints
to improve the training efficiency. Based on the depth
video and the estimated 3D joint positions, we learn
the spatio-temporal features directly for each action.
The spatio-temporal features can be treated as the the
resulting descriptors of the local spatio-temporal in-
terest points. These interest points are dense sampled
from a local region around the joint. We perform the
vector quantization by clustering the spatio-temporal
feature for each joint. Each 3D joint is associated with
a histogram feature. We call this histogram feature
joint-based ISA feature or JISA feature.
More importantly, to deal with the tracking er-
rors of the skeleton data and better characterize the
intra-class variations, a multiple kernel learning ap-
proach is employed to learn the skeleton structure that
combines these discriminative JISA features. The ar-
ticulated human body has a large number of kine-
matic joints, but a certain action is usually only asso-
ciated with a subset of them. For example, the joints
“head” and “right wrist” are discriminative for action
“drinking”. In our paper, each action is represented
as a linear combination of joints, and their discrimi-
native weights are learnt via a multiple kernel learn-
ing method. This weighted joint-base model is more
robust to the errors in the features, and it can better
characterize the intra-class variations in the actions.
Our main contributions include the following
three aspects. First, we proposes a novel joint-based
features for action recognition under an unsupervised
learning paradigm. The features are discriminative
enough to characterize variations in different joints.
Second, we demonstrate how to deal with the noisy
skeleton data using the multi kernel learning ap-
proach. The weighted joint-base features are capable
of characterizing both the human action and their in-
ternal variation. Third, We explore how many joints
are sufficient for action recognition in our framework
We observe that a small subset of joints is sufficient
to perform action recognition. Our experimental re-
sults show that, despite the simplicity of our proposed
method, this method is able to achieve better recogni-
tion accuracy than the state-of-the-art methods.
The reminder of this paper is organized as follows.
Section 2 reviews the related work. Section 3 gives
details of learning joint-based features. In Section 4,
the skeleton structure is learnt using multiple kernel
learning approach. The experimental results are pre-
sented in Section 5. Finally, Section 6 concludes the
paper.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
550
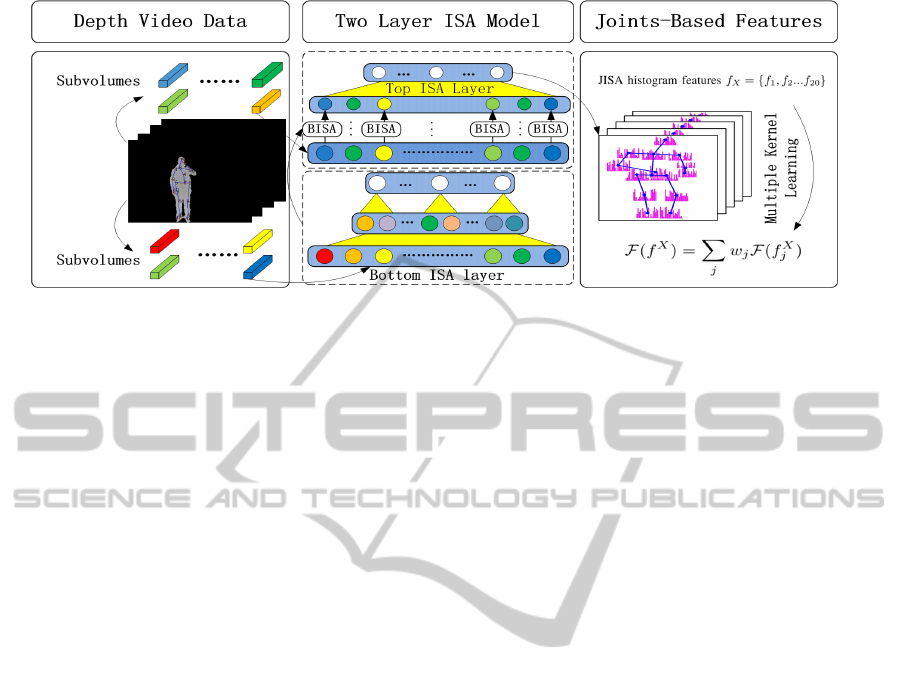
Figure 2: An overview of our method: We randomly sample the subvolumes from local regions of each joint of the depth
video data. The subvolumes are given as input to the bottom ISA network. The learned bottom ISA model are copied to the
top ISA network. The stacked ISA model learn spatio-temporal features. A multiple kernel learning approach is employed to
learn a linear combination of joint-based features and classify the actions. (best viewed in color)
2 RELATED WORK
In traditional 2D videos captured by a single cam-
era, action recognition mainly focused on analyzing
spatio-temporal patterns. As RGBD sensors become
available, research of action recognition based on the
depth sequences attempted to adopt techniques origi-
nally developed for color sequences. For instance, Lv
and Nevatia in (Lv and Nevatia, 2006) employ a hid-
den markov model (HMM) to represent the transition
probability for pre-define 3D joint positions. (Li et al.,
2010) proposed a Bag of 3D points model by sam-
pling points from the silhouette of the depth images.
Consequently, a GMM is used to globally model the
postures, and an action graph (Li et al., 2008) is used
for inference. Similarly, in (Han et al., 2010), the 3D
joint position is described using the conditional ran-
dom filed (CRF).
Local interest point is the most popular method
for classification and recognition task in computer vi-
sion. Interest point provides a compact representa-
tion of image content by describing local parts of the
scene thus offer robustness to occlusions, clutter, and
intra-class variations. However, as discussed earlier,
features such as STIP (Laptev, 2005) and HOG (Dalal
and Triggs, 2005) are not reliable in depth sequences,
adopting local interest points based methods operate
in depth sequences is difficult.
Until recently, a few spatial-temporal cuboid de-
scriptors for depth videos were proposed. (Zhao et al.,
2012) build local depth pattern by computing the dif-
ference of the average depth values between the cells.
(Cheng et al., 2012) build a comparative coding de-
scriptor to describe the depth cuboid by comparing
the depth value of the center point with the nearby
26 points. (Xia and Aggarwal, 2013) propose depth
cuboid similarity feature as the descriptor for the
spatio-temporal depth cuboid that describes the local
“appearance” in the depth video. (Oreifej and Liu,
2013) present a new descriptor HON4D using a his-
togram capturing the distribution of the surface nor-
mal orientation in the 4D space of time, depth, and
spatial coordinates. (Zhang and Parker, 2011) extract
STIPS by calculating a response function fromt both
the depth and RGB channels and use the gradients
along x, y, t directions as the descriptor. Notice that
some existing methods still depend on the detectors
and descriptors designed for RGB images.
In the literature, there has been another category
for action recognition using depth images: algorithms
based on high-level features. It is generally agreed
that knowing the 3D joint position is helpful for ac-
tion recognition. (Wang et al., 2012b) combine joint
location features and local occupancy features and
employ a Fourier temporal pyramid to represent the
temporal dynamics of the actions. (Xia et al., 2012)
take the skeletal joint locations and vote them into 3D
spatial bins and build posture words for action recog-
nition. Another method for modeling actions is dy-
namic temporal warping (DTW), which matches the
3D joint positions to a template (M
¨
uller and R
¨
oder,
2006), and action recognition can be done through
a nearest-neighbor classification method. Its perfor-
mance heavily depends on a good metric to measure
the similarity of frames. However, the 3D joint po-
sition that are generated via skeleton tracking from
the depth map sequences are noisy. Moreover, with
limited amount of training data, training a complex
model is easy to overfit.
Different from these approaches, we propose to
LearningWeightedJoint-basedFeaturesforActionRecognitionusingDepthCamera
551

recognize human actions with weighted joints-based
features. The above approach focus on hand-tuned
features, which are difficult and time-consuming to
be extended to depth images. In contrast, we compute
the joint-based features using an unsupervised learn-
ing approach. It is easy to extend our approach to
other modalities. To deal with the tracking errors of
the skeleton, a multiple kernel learning approach is
employed to learn the skeleton structure that combine
these joint-based features.
3 LEARNING JOINTS-BASED
FEATURES
In this section, we first briefly describe the ISA al-
gorithm. Next we give details of how deep learning
techniques can be used to obtain the joint-based fea-
tures.
3.1 Independent Subspace Analysis
ISA is an unsupervised learning algorithm that learns
features from unlabeled subvolumes. First, random
subvolumes are extracted from the local region of 20
joints. The set of subvolumes is then normalized and
whitened. The pre-processed subvolumes are feed to
ISA networks as input units. An ISA network (Hyvri-
nen et al., 2009) is described as a two-layer neural
network, with square and square-root nonlinearities
in the first and second layers respectively.
We start with any input unit x
t
∈ R
n
for each ran-
dom sampled subvolume. We split each subvolume
into a sequence of image patches and flatten them into
a vector x
t
with the dimension n. The activation of
each second layer unit is
p
i
(x
t
;W,V )=
q
∑
m
k=1
V
ik
(
∑
n
j=1
W
k j
x
t
j
)
2
(1)
ISA learns parameters W through finding sparse
feature representations in the second layer by solving
min
W
∑
T
t=1
∑
m
i=1
p
i
(x
t
;W,V )
s.t.WW
T
= I
(2)
Here, W ∈ R
k×n
is the weights connecting the in-
put units to the first layer units. V ∈ R
m×k
is the
weights connecting the first layer units to the second
layer units; n, k, m are the input dimension, number
of the first layer units and second layer units respec-
tively. The orthonormal constraint is to ensure the fea-
tures are diverse.
The model so far has been unsupervised. The bot-
tom ISA model learns spatio-temporal features that
detect a moving edge in time. As is common in neural
network, we stack another ISA layer with PCA on top
of bottom ISA. We use PCA to whiten the data and
reduce the dimensions of the input unit. The model
is trained greedily layerwise in the same manner as
other algorithms described in (Bengio et al., 2007;
Hinton et al., 2006; Le et al., 2011).
3.2 Learning Joint-based Features
One of the disadvantages in training the ISA model
is that it could be slow when the dimension of the
input data is large. In this paper, we apply the ISA
algorithm to the local region of joints. As the local
region of each joint is small comparing to the whole
image, we could train the model efficiently. Addition-
ally, it is possible to dense sample the local region of
the joint to capture more discriminative information.
Moreover, the features are discriminative enough to
characterize variations in different joints.
For a human subject, 20 joint positions are tracked
by the skeleton tracker (Shotton et al., 2011). For
each joint i at frame t, its local region LR
i
t
is of size
(V
x
,V
y
) pixels. Let T denote the temporal dimen-
sion of the depth video. Given a sequence of depth
images {I
1
, I
2
...I
T
} containing a human subject per-
forming an activity, the depth video is represented
as the set of joints volumes {JV
1
, JV
2
...JV
20
}. Each
joints volume can be considered as a sequence of lo-
cal region JV
i
= {LR
i
1
, LR
i
2
...LR
i
T
}. The size of JV
i
is V
x
× V
y
× T . Based on the above ISA model, we
compute the spatio-temporal features directly from
JV
i
for each joint. The spatio-temporal features can
be treated as the the resulting descriptors of the local
spatio-temporal interest points. Each interest point is
represented by a subvolume, which is of size V s
x
×
V s
y
×V s
t
. The interest points are dense sampled from
JV
i
. We perform the vector quantization by clustering
the spatio-temporal feature for each joint. Each 3D
joint is associated with a histogram feature JISA
i
.
In order to capture the 3D position to fully model
an joint, it is necessary to integrate the position infor-
mation of joint i into the final feature JISA
i
. For each
joint i at frame t, we extract the pairwise relative po-
sition features P
t
i
by taking the difference between the
3D position p
i
of joints i and that of each other joint
j: P
t
i
= {p
i
− p
j
|i 6= j}.
Inspired by the Spatial Pyramid approach (Lazeb-
nik et al., 2006), we group the adjacent joints together
as a joints pair to capture the spatial structure of the
action. Therefore, for a human subject, we have 19
joints pairs. Each joints pair is represented as a his-
togram feature JISAp
i j
= [JISA
i
, JISA
j
].
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
552
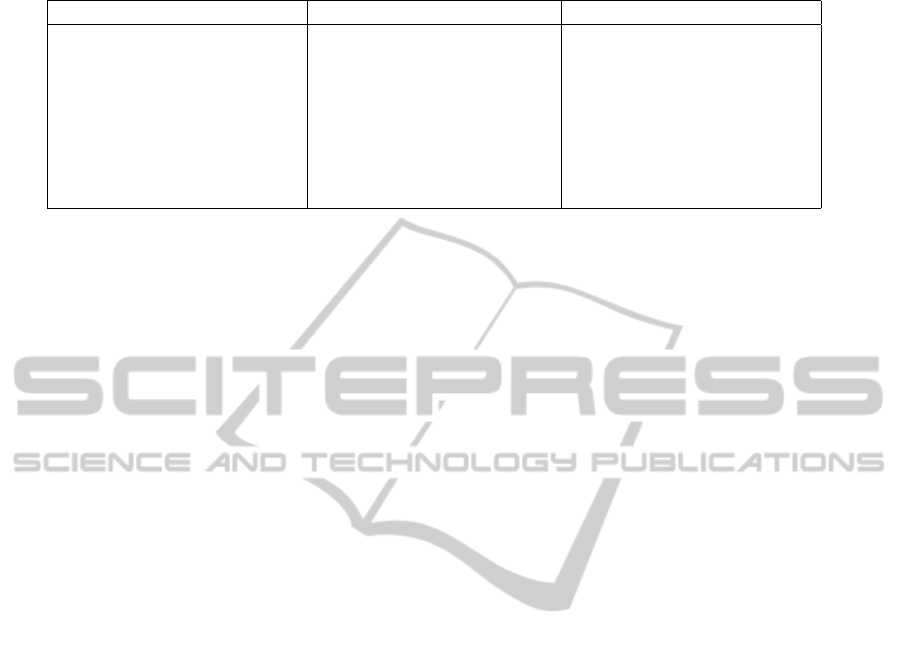
Table 1: The three action subsets used in our experiments.
Cross Subject Subset 1 (CS1) Cross Subject Subset2 (CS2) Cross Subject Subset 3 (CS3)
Horizontal Wave (HoW) High Wave (HiW) High Throw (HT)
Hammer (HM) Hand Catch (HC) Forward Kick (FK)
Forward Punch (FP) Draw X (DX) Side Kick (SK)
High Throw (HT) Draw Tick (DT) Jogging (JG)
Hand Cap (HCp) Draw Circle (DC) Tennis Swing (TSw)
Bend (BD) Hands Wave (HW) Tennis Serve (TSr)
Tennis Serve (TSr) Forward Kick (FK) Golf Swing (GS)
Pickup Throw (PT) Side Boxing (SB) Pickup Throw (PT)
4 LEARNING SKELETON
STRUCTURE
Although the proposed feature is robust to noise, to
deal with the tracking errors of the skeleton data and
better characterize the intra-class variations, a multi-
ple kernel learning approach is employed to learn the
skeleton structures that combines these discriminative
joint-based features.
Our aim is to learn an SVM classifier where rather
than using a pre-specified kernel, the kernel is learnt
to be a linear combination of given base kernels. The
classifier defines a function F ( f
X
) that is used to
rank the depth video X by the likelihood of contain-
ing an action of interest. The function argument f
X
is
represented by the a collection of histogram features
f
X
= { f
1
, f
2
... f
t
}, where t is the number of features.
The function F is learnt, along with the opti-
mal combination of histogram features f
X
, by using
the Multiple Kernel Learning techniques proposed in
(Vishwanathan et al., 2010). The function F ( f
X
) is
the discriminant function of a Support Vector Ma-
chine, and is expressed as
F ( f
X
) =
M
∑
i=1
y
i
α
i
K( f
X
, f
i
) + b (3)
Here, f
i
, i = 1,..., M denote the feature histograms of
M training depth video data, selected as representa-
tive by the SVM, y
i
∈ {+1, −1} are their class labels,
and K is a positive definite kernel, obtained as a linear
combination of base kernels
K( f
X
, f
i
) =
∑
j
w
j
K( f
X
j
, f
i
j
) (4)
MKL learns both the coefficient α
i
and the ker-
nels combination weight w
j
. For a multi-class prob-
lem, a different set of weights {w
j
} are learnt for each
class. We choose one-against-rest to decompose a
multi-class problem.
Because of linearity, Eq .3 can be rewrittten as
F ( f
X
) =
∑
j
w
j
F ( f
X
j
) (5)
where
F ( f
X
j
) =
M
∑
i=1
y
i
α
i
K( f
X
j
, f
i
j
) + b (6)
With each kernel corresponding to each feature, there
are 20 weights w
j
to be learned for the linear com-
bination for IJSA features, and 19 weights w
j
to be
learned for JISAp features. Weights can therefore em-
phasis more discriminative joints for an action and we
can even ignore joints that are not discriminative by
setting w
j
to zero.
5 EXPERIMENTS
We evaluate our proposed method on the MSRAc-
tion3D dataset (Li et al., 2010). In this section,
we first describe the dataset and experimental setup.
Next, we give the details of the model. Then, we
show the leaned structure of skeleton for each action.
We study how many joints in a depth video are suf-
ficient to perform action detection and recognition.
Finally we present the performance of our approach.
We compare our algorithm with state-of-the-art meth-
ods on action recognitions from depth videos. Ex-
perimental results show that our algorithm gives sig-
nificantly better recognition accuracy than algorithm
based on low-level hand-designed features and high-
level joint-based features.
5.1 Dataset and Experimental Setup
The MSRAction3D dataset (Li et al., 2010) is a pub-
lic dataset that provides sequences of depth maps and
skeletons captured by a RGBD camera. It includes
20 actions performed by 10 subjects facing the cam-
era during performance. Each subject performed each
action 2 or 3 times. As shown in Fig 1, actions in
this dataset reasonably capture a variety of motions
related to arms, legs, torso, and their combinations.
LearningWeightedJoint-basedFeaturesforActionRecognitionusingDepthCamera
553
(a) TSr (b) HoW (c) FP (d) HT (e) HCp (f) BD (g) HM (h) PT (i) HiW (j) HC
(k) DX (l) DT (m) DC (n) HW (o) FK (p) SB (q) SK (r) JG (s) TSw (t) GS
Figure 3: The skeleton structure for 20 action classes in MSRAction3D dataset. Our method can learn the discriminative joint
pairs for each action class. The weight w
j
is used to describe the discrimination of of the joint pairs. The joint pairs with the
w
j
>0 are marked as thick and red lines. All abbreviations of action classes are written out in Table 1. (best viewed in color).
In order to facilitate a fair comparison, we follow
the same experimental settings as (Li et al., 2010; Or-
eifej and Liu, 2013; Xia and Aggarwal, 2013) to split
20 actions into three subsets as listed in Table 1. In
each subset, 1/2 subjects are used as training and the
rest ones used as testing.
5.2 Model Details
We focus on the problem of human action recognition
from depth video data. We train ISA model on the
MSR Action3D training sets. The input units to the
bottom layer of ISA model are of size 12 × 12 × 10,
12, 12, 10 means spatial and temporal size of the sub-
volumes. The subvolumes to the top layer of the ISA
model are the same size with the bottom layer. The
model parameters for different joints are the same.
We performs vector quantizatoin by K-means on the
learned spatio-temporal features for each joint. The
codebook size k is 700. We choose χ
2
as the his-
togram kernel for multi class SVM classifier. Finally,
each depth video is represented by 20 JISA features
or 19 JISAp features.
5.3 Skeleton Structure
Our method is able to deal with the tracking errors
of the skeleton data and better characterize the intra-
class variations. We start from the intuition that, al-
though the human body has a large number of kine-
matic joints, a certain action usually only associated
with a subset of them.
In our experiments, each action is represented as
a linear combination of joints-based features. We
learned their weight via a multiple kernel learning
method. Fig 3 illustrates the skeleton with the weight
of joint pairs discovered by our method. The joint
pairs with the weight w
j
>0 are marked as thick and
red lines. The average number of joint pairs for 20
action class in the MSRAction3D dataset is 4. 7 of
20 action classes have less than 2 discriminative joint
pairs. 3 of 20 action classes have only 1 discrimi-
native joint pair. The maximum number of discrim-
inative joint pairs is 6 for action class Pickup and
Throw. As the action class Pickup and Throw con-
sist of two sub-action, it is more complex than other
action classes in MSRAction3D dataset.
In addition, we can observe that our method can
learn the structure of the skeleton very well. Fig. 3(t)
shows that Golf Swing is represented by the combi-
nation of joints left hand, left wrist, right hand, right
wrist and right elbow. For action classes Draw X (see
Fig. 3(k)), Draw Tick (see Fig. 3(l)) and Draw Circle
(see Fig. 3(m)), they have one common discriminative
joint pair: left wrist and left hand. Fig. 3(j) shows
that Hand Catch is represented by the combination of
joints left elbow, left wrist and left hand. One inter-
esting observation in Fig. 3 is: none of the action
classes in MSRAction3D dataset has discriminative
foot joints like left foot or right foot. Normally, action
classes like Jogging, Forward Kick and Side Kick are
related to foot joints. However, for the MSRAction3D
dataset, the tracking positions of the foot joints are
full of noise, which shows that our method is robust
to the tracking errors of the joint 3D positions.
5.4 Experimental Results
We compare our method with the state-of-the-art
methods on the MSRAction3D dataset. We report
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
554
(a) Cross Subject Subset 1 (CS1) (b) Cross Subject Subset 2 (CS2) (c) Cross Subject Subset 3 (CS3)
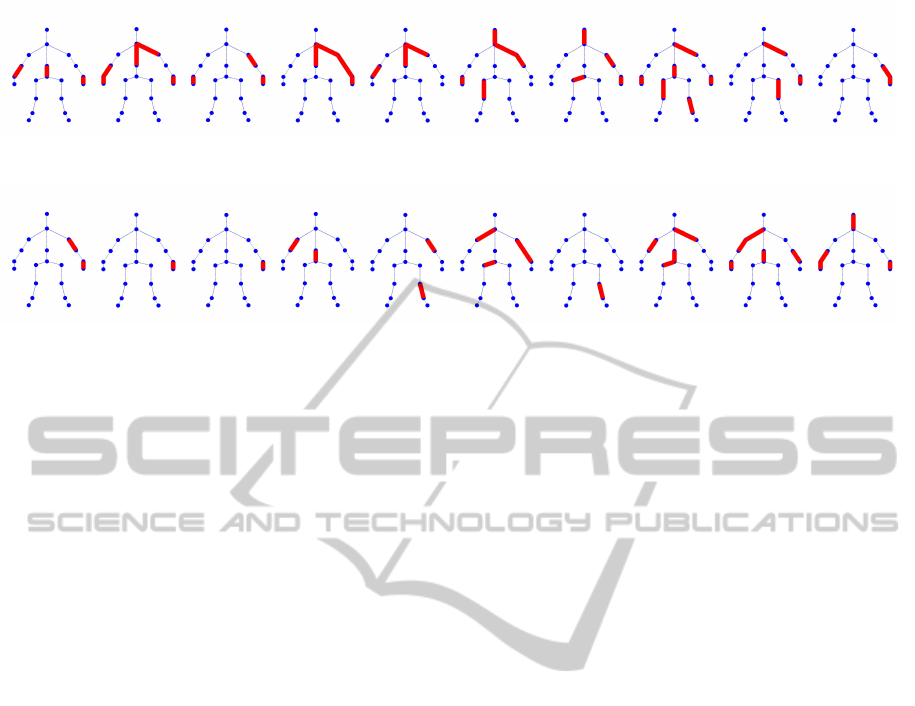
Figure 4: The confusion matrices for our method with JISAp features on three subsets of the MSRAction3D dataset. Rows
represent the actual classes, and columns represent predicted classes. All abbreviations of action classes are written out in
Table 3. (best viewed in color).
Table 2: Comparison of recognition accuracy on MSRAction3D dataset.
Method Accuracy
EigenJoints (Yang and Tian, 2012) 0.823
Random Occupancy Pattern (Wang et al., 2012a) 0.865
Mining Actionlet Ensemble (Wang et al., 2012b) 0.882
Histogram of Oriented 4D Normals (Oreifej and Liu, 2013) 0.889
Spatio-Temporal Depth Cuboid Similarity Feature (Xia and Aggarwal, 2013) 0.893
Our Method with JISA features 0.895
Our Method with JISAp features 0.912
Table 3: The performance of our method on three test sets.
Method CS1 CS2 CS3
Our Method with JISA 0.870 0.873 0.942
Our Method with JISAp 0.860 0.932 0.942
the performance of our method in Table 2. Our
method achieves superior performance compared to
state-of-the-art results in the literature. There is an in-
crease in performance between our method (91.2%)
and the closet competitive method (89.3%). This is a
very good performance considering that the skeleton
tracker sometimes fails and the tracked joint positions
are quite noisy. Additionally, it is interesting to note
that in our method the obtained accuracy using JISAp
features is 91.2%, which is better than using JISA fea-
ture. This prove the advantage of spatial pyramid ap-
proach, though we just group the adjacent joints to-
gether as a joint pair to capture the spatial structure
of the skeleton. The confusion tables for three test
sets are illustrated in Fig. 4. We report the average
accuracy of three test sets in Table 3. While the per-
formance in CS2 and CS3 is promising, the accuracy
in CS1 is relatively low. This is probably because ac-
tion in CS1 are with similar movements. For example,
in CS1 Hammer tends to be confused with Forward
Punch and Horizontal Wave, and Pickup Throw con-
sists of Bend and High Throw. Although our method
obtains an accuracy of 100% in 16 out of 24 actions,
the accuracy of the Hammer in CS1 is only 13.33%.
This is probably due to the small number of sub-
jects and also the significant variations of the Ham-
mer action performed by different subjects. The per-
formance can be improved by adding more subjects.
6 CONCLUSIONS
We presented a novel, simple and easily imple-
mentable approach for action recognition from depth
images. The stacked ISA network learns the spatio-
temporal features in an unsupervised way. This archi-
tecture could leverage the plethora of the unlabeled
data and adapt easily to new sensors. The multi-
ple kernel learning learns the optimal combination of
joint-based features, which can deal with the track-
ing errors of the skeleton data and better characterize
the intra-class variations. The experiments show that
the proposed method outperforms a range of previous
approaches on MSRAction3D dataset.
LearningWeightedJoint-basedFeaturesforActionRecognitionusingDepthCamera
555

ACKNOWLEDGEMENTS
This work was carried out in the context of the multi-
sensor data fusion group at the research institute for-
tiss.
REFERENCES
Bengio, Y., Lamblin, P., Popovici, D., and Larochelle, H.
(2007). Greedy layer-wise training of deep networks.
pages 153–160.
Cheng, Z., Qin, L., Ye, Y., Huang, Q., and Tian, Q.
(2012). Human daily action analysis with multi-view
and color-depth data. In Proceedings of the 12th inter-
national conference on Computer Vision - Volume 2,
ECCV’12, pages 52–61, Berlin, Heidelberg. Springer-
Verlag.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In In CVPR, pages 886–
893.
Han, L., Wu, X., Liang, W., Hou, G., and Jia, Y.
(2010). Discriminative human action recognition in
the learned hierarchical manifold space. Image Vision
Comput., 28(5):836–849.
Hinton, G. E., Osindero, S., and Teh, Y. W. (2006). A fast
learning algorithm for deep belief nets. Neural Com-
putation, 18(7):1527–1554.
Hyvrinen, A., Hurri, J., and Hoyer, P. O. (2009). Natural
Image Statistics: A Probabilistic Approach to Early
Computational Vision. Springer Publishing Company,
Incorporated, 1st edition.
Laptev, I. (2005). On space-time interest points. Int. J.
Comput. Vision, 64(2-3):107–123.
Laptev, I., Marszałek, M., Schmid, C., and Rozenfeld,
B. (2008). Learning realistic human actions from
movies. In Conference on Computer Vision & Pattern
Recognition.
Lazebnik, S., Schmid, C., and Ponce, J. (2006). Beyond
bags of features: Spatial pyramid matching for recog-
nizing natural scene categories. In Computer Vision
and Pattern Recognition, 2006 IEEE Computer Soci-
ety Conference on, volume 2, pages 2169–2178.
Le, Q., Zou, W., Yeung, S., and Ng, A. (2011). Learning
hierarchical invariant spatio-temporal features for ac-
tion recognition with independent subspace analysis.
In Computer Vision and Pattern Recognition (CVPR),
2011 IEEE Conference on, pages 3361–3368.
Li, W., Zhang, Z., and Liu, Z. (2008). Expandable data-
driven graphical modeling of human actions based on
salient postures. IEEE Trans. Cir. and Sys. for Video
Technol., 18(11):1499–1510.
Li, W., Zhang, Z., and Liu, Z. (2010). Action recognition
based on a bag of 3d points.
Lv, F. and Nevatia, R. (2006). Recognition and segmenta-
tion of 3-d human action using hmm and multi-class
adaboost. In Leonardis, A., Bischof, H., and Pinz, A.,
editors, Computer Vision ECCV 2006, volume 3954
of Lecture Notes in Computer Science, pages 359–
372. Springer Berlin Heidelberg.
M
¨
uller, M. and R
¨
oder, T. (2006). Motion templates for
automatic classification and retrieval of motion cap-
ture data. In Proceedings of the 2006 ACM SIG-
GRAPH/Eurographics symposium on Computer an-
imation, SCA ’06, pages 137–146, Aire-la-Ville,
Switzerland, Switzerland. Eurographics Association.
Oreifej, O. and Liu, Z. (2013). Hon4d: Histogram of ori-
ented 4d normals for activity recognition from depth
sequences. In Computer Vision and Pattern Recogni-
tion (CVPR).
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio,
M., Moore, R., Kipman, A., and Blake, A. (2011).
Real-time human pose recognition in parts from sin-
gle depth images. In Proceedings of the 2011 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, CVPR ’11, pages 1297–1304, Washington, DC,
USA. IEEE Computer Society.
Vishwanathan, S. V. N., Sun, Z., Theera-Ampornpunt, N.,
and Varma, M. (2010). Multiple kernel learning and
the SMO algorithm. In Advances in Neural Informa-
tion Processing Systems.
Wang, J., Liu, Z., Chorowski, J., Chen, Z., and Wu, Y.
(2012a). Robust 3d action recognition with random
occupancy patterns. In Proceedings of the 12th Euro-
pean conference on Computer Vision - Volume Part
II, ECCV’12, pages 872–885, Berlin, Heidelberg.
Springer-Verlag.
Wang, J., Liu, Z., Wu, Y., and Yuan, J. (2012b). Mining
actionlet ensemble for action recognition with depth
cameras. In Computer Vision and Pattern Recogni-
tion (CVPR), 2012 IEEE Conference on, pages 1290–
1297.
Xia, L. and Aggarwal, J. (2013). Spatio-temporal depth
cuboid similarity feature for activity recognition us-
ing depth camera. In Computer Vision and Pattern
Recognition (CVPR).
Xia, L., Chen, C.-C., and Aggarwal, J. (2012). View invari-
ant human action recognition using histograms of 3d
joints. In Computer Vision and Pattern Recognition
Workshops (CVPRW), 2012 IEEE Computer Society
Conference on, pages 20–27.
Yang, X. and Tian, Y. (2012). Eigenjoints-based action
recognition using nave-bayes-nearest-neighbor. In
CVPR Workshops, pages 14–19. IEEE.
Zhang, H. and Parker, L. (2011). 4-dimensional local
spatio-temporal features for human activity recogni-
tion. In Intelligent Robots and Systems (IROS), 2011
IEEE/RSJ International Conference on, pages 2044–
2049.
Zhao, Y., Liu, Z., Yang, L., and Cheng, H. (2012). Combing
rgb and depth map features for human activity recog-
nition. In Signal Information Processing Association
Annual Summit and Conference (APSIPA ASC), 2012
Asia-Pacific, pages 1–4.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
556
