
Generalized Preemptive RANSAC
Making Preemptive RANSAC Feasible even in Low Resources Devices
Severino Gomes-Neto
1,2
and Bruno M. Carvalho
2
1
Escola Agr
´
ıcola de Jundia
´
ı, UFRN, RN 160 - Km 03, Distrito de Jundia
´
ı, Maca
´
ıba/RN, Brazil
2
Departamento de Inform
´
atica e Matem
´
atica Aplicada, UFRN, Campus Universit
´
ario Lagoa Nova, Natal/RN, Brazil
Keywords:
Preemptive RANSAC, Generalized Preemptive RANSAC, Preemption Function, BRUMA, Computer Vision.
Abstract:
This paper examines a generalized version of Preemptive RANSAC for visual motion estimation. The ap-
proach described employs the BRUMA function for dealing with varying block sizes and the percentages
of hypotheses to be removed during the hypotheses rejection phase. The generation of a flexible number of
hypotheses is also performed in order to balance the preemption scheme. Experiments were performed for
both forward and side-wise motions in synthetic environment by using simulation and the ground-truth used
to compare the Standard Preemptive RANSAC and its generalized version. Simulations confirmed that the
quality of the results produced by the Standard Preemptive RANSAC degrade as the hardware resources used
are decreased, as opposed to the results produced by the Generalized Preemptive RANSAC, with the results
of the Standard Preemptive RANSAC having errors up to eleven times larger than the Generalized Preemptive
RANSAC.
1 INTRODUCTION
The tasks carried in automated motion estimation are
computationally expensive, resulting in a consider-
able amount of time dedicated to perform them. Thus,
one should concentrate in achieving accurate estima-
tions in a not prohibitive amount of time when plan-
ning a computer vision system. In other words, one
needs to reach the balance between these goals in or-
der to design a good system.
We are particularly interested in the research that
focus on accelerating the methods in order to promote
their feasibility in low power and/or low cost hard-
ware setups, allowing these setups to be employed
in fields such as robotics, autonomous navigation and
several other applied Computer Vision (CV) tasks.
Computer Vision systems have made large use of
the RANSAC algorithm (Fischler and Bolles, 1981)
in order to deal with the hypothesize-and-verify prob-
lem. However, Nist
´
er discussed that the standard
RANSAC is not designed for executions under time
constraints (Nist
´
er, 2003).
The standard RANSAC first generates hypotheses
from subsets of observations and then evaluates these
hypotheses against all the available observations in or-
der to determine which hypothesis is the best repre-
sentative of the entire population (the closest from the
ideal solution), and keeps working until it reaches a
confidence threshold. This conceptual simplicity and
the results achieved made RANSAC a standard in the
CV and 3D Reconstruction (3DR) fields.
Nevertheless, the standard algorithm has insuffi-
cient performance in some cases. Thus, several meth-
ods were published targeting the goal of speeding up
RANSAC tasks and dealing with the trade-off be-
tween quality and time by working in three major
points: alternative hypothesize-and-verify methods,
improvements on the hypotheses generation and im-
provements on the hypotheses evaluation.
The first approach has a variety of works, such as
MLESAC (Torr and Zisserman, 2000), AMLESAC
(Konouchine et al., 2005), KALMANSAC (Vedaldi
et al., 2005), PROSAC (Chum and Matas, 2005),
GASAC (Rodehorst and Hellwich, 2006) and GOOD-
SAC (Michaelsen et al., 2006). All of them execute
hypothesize-and-verify tasks but each one has its own
particularities, leading to algorithms that are efficient
for specific classes of applications.
Nist
´
er’s Efficient Five-Point Algorithms (Nist
´
er,
2004) and hypotheses generation using Graphics Pro-
cessor Units (GPUs) are examples of the second
branch that consists of speeding up the hypotheses
generation process or enhancing their quality in order
to decrease the number of generation rounds. How-
406
Gomes-Neto S. and M. Carvalho B..
Generalized Preemptive RANSAC - Making Preemptive RANSAC Feasible even in Low Resources Devices.
DOI: 10.5220/0004737004060415
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 406-415
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

ever, it has been shown that each hypotheses gen-
eration method fits better to certain camera motions
(
ˇ
Segvi
´
c et al., 2007b), i.e., we do not have a single
best hypotheses generation method.
The last approach focuses on accelerating the
evaluation process or, alternatively, detecting a condi-
tion that avoids unnecessary exhaustive verification.
This anticipation in the end task is often called pre-
emption and it is the way we choose for improving
the performance of the hypothesize-and-verify algo-
rithm (RANSAC in our work).
The need for time constraints comes from the re-
quirement of working in a range of time variability
as narrow as possible. The time constraints assure
the control over variability, but is unable to assure the
preservation of estimation accuracy by itself.
We use the Nist
´
er’s Preemptive RANSAC (Nist
´
er,
2003) (referred in the rest of the paper as P-RANSAC)
as the representative of the last mentioned approach
since it is the most used method after ten years of its
publication.
The P-RANSAC is aware of the need of chang-
ing evaluation process in order to deliver estimations
that still are in a level of accuracy compatible with
vision applications. The results presented in (Nist
´
er,
2003) made clear that it is possible to reach the bal-
ance between accuracy and speed of execution to de-
velop useful applications. The P-RANSAC employs
a function in order to identify the moment of preemp-
tion. This concept is simple and powerful, but the
function defined in Nist
´
er’s work is very dependent
on number of hypotheses and observations to work
properly.
Afterwards, Nist
´
er speeded up the hypotheses
generation, the most costly operation in the estima-
tion process, by using the efficient 5-point algorithm
(Nist
´
er, 2004).
Even demonstrating that the balance is possible,
Nist
´
er’s works are not fit for every vision applica-
tion as has been pointed out in (Raguram et al., 2008;
Chum and Matas, 2008; Gomes-Neto and Carvalho,
2010). Despite the issues concerning the fact that P-
RANSAC been derived from RANSAC and conse-
quently inherits some of its limitations, the problem
that is embedded in its conception is the presence of
constant parameters that were chosen empirically or
arbitrarily.
Empirical parameters depend on the hardware
where the experiments were performed. Thus, we
have a problem to reproduce the empirical parame-
ters or to fit it to distinct hardware setups. In the case
of the arbitrary parameters, one makes assumptions
that should be valid for all possible setups, and, in
the case of being wrong, that results in a bad problem
modeling. In order to circumvent that, we employ the
function BRUMA (Block Resizing for UnderManned
Amount of Assays Avoidance) (Gomes-Neto and Car-
valho, 2010), that performs a generalization of pre-
emption functions and allows parameter variations.
The idea is that when this preemption function is used
with P-RANSAC, one can achieve the balance be-
tween accuracy and time consumption by chosen pa-
rameters that fit to particular hardware setups in what
we call Generalized Preemptive RANSAC (GPR).
This work presents the results of experiments by
using GPR to determine parameters that fit distinct
hardware setups in order to prove the feasibility of
adapting the original P-RANSAC to running in low
resource devices.
The rest of this work is organized as follows. Sec-
tion 2 presents the Generalized Preemptive RANSAC,
while Section 3 describes the methodology employed
in the experiments. Sections 4 and 5 present the ex-
perimental results and the discussion about them, re-
spectively. Finally, Section 6 summarizes the paper,
highlighting contributions and further work.
2 GENERALIZED PREEMPTIVE
RANSAC
We now present the Generalized Preemptive
RANSAC (GPR), a framework that uses the BRUMA
function in the P-RANSAC, but also allowing the
variation of an additional parameter of the pre-
emption scheme in order to show that one fixed
parameter set for all cases may not be able to balance
the preemption and control the error level of the
estimation task.
The first goal is to produce similar results when
comparing with P-RANSAC under the same time
constraints, but selecting distinct parameters to prove
the aforementioned claim in a fair comparison stan-
dard. The second goal is to employ the GPR frame-
work in restrictive conditions, where P-RANSAC’s
estimation quality is expected to degenerate due to
lack of resources for supporting the original param-
eters selection, and show that GPR is more robust
under the same conditions, a result obtained by just
selecting the parameters in accordance with the hard-
ware limitations.
The GPR makes use of three parameters that to-
gether can control the preemptive evaluation: the
number of generated hypotheses, the size of the block
of observations that rule the hypotheses elimination
task and the fraction of hypotheses to remove in each
rejection round.
GeneralizedPreemptiveRANSAC-MakingPreemptiveRANSACFeasibleeveninLowResourcesDevices
407

The P-RANSAC preemption function (1) is given
by
f (i) = bM · 2
−b
i
B
c
c, (1)
where b.c denotes the floor operator, M is the number
of available hypotheses and B denotes a fixed block
size (i.e. the amount of observations the algorithm
must test in an evaluation round to allow hypothe-
ses rejection). The BRUMA function can be seen as
a generalization of the P-RANSAC preemption func-
tion (1) and its given by
f (i) = bM
i
· p
−b
i
B
i
c
i
c, (2)
where M
i
denotes the amount of hypotheses at the i-
th evaluation step, p
i
is a scalar indicating the fraction
of hypotheses to eliminate on a rejection round and B
i
denotes the block size at the i-th evaluation step.
In both equations every time i reaches the block
size the algorithm sorts the available hypotheses ac-
cording their scores and discards a fraction of less
promising hypotheses, i.e., the hypotheses with the
lowest scores. The process is repeated until one of
the stop conditions occur, either a single hypothesis
remains and is the winner or the time budget is ex-
hausted and the hypotheses with the best score is the
winner.
The P-RANSAC deals with hybrid preemption
scheme emphasizing breadth as defined in
∀o
j
, π
n
(o
j
) =
n
∑
i=1
ρ(o
i
, h
i| j
), (3)
where h
i| j
denotes that the hypothesis chosen depends
on the observation, since the observations are grouped
in blocks. This means that its preemption function
prioritizes the coverage of hypotheses in the evalua-
tion process. However, since P-RANSAC defines a
rigid setup of parameters, it can degenerate to a pure
breadth-first preemption scheme if it does not perform
at least one round of elimination before exhausts the
time budget.
The P-RANSAC’s preemption function inspired
BRUMA, with the latter allowing varying block sizes
(B) and fraction of hypotheses to remove (referred as
p
i
or FHR, from now on). By using BRUMA instead
of the original function, a system is able to adjust the
parameters and fit pure depth-first, pure breadth-first
or a wider number of possibilities of hybrid preemp-
tion schemes as shown in (Gomes-Neto and Carvalho,
2010) and may also avoid degeneration due to the lack
of elimination rounds mentioned previously.
The usage of the BRUMA function allows us to
vary two of the control parameters, with the third
concerning the maximum number of hypotheses to
be generated (and indirectly the portion of time dedi-
cated to hypotheses generation).
In the generation step, P-RANSAC determines
a maximum number of hypotheses to be generated.
This number is fixed at 500, and, one can empirically
see that it is easy to reach and pass this number when
working with relaxed time budgets and/or powerful
hardware. However, each CV application has a hard-
ware setup to fit its demands and it is not rare to have
modest configurations even having restricted time re-
quirements.
Taking this into account, we hypothesized that in
lower capability devices the Maximum Number of
Hypotheses to Generate (MNHG) must be decreased,
and confirmed it experimentally. That means that
each device must have its MNHG determined by its
individual capacities of generating and testing hy-
potheses. We will return to this point when describing
experiments and their results.
In order to save time in the evaluation process, P-
RANSAC defines a periodicity in which it has to per-
form hypotheses elimination. The period is defined by
a number of observations the algorithm has already
tested before elimination and is called block size in
reference of the block of observations.
The determination of the block size has capital im-
portance in the process of evaluation, since it deter-
mines the moment that the less promising hypotheses
so far are eliminated. If the block size is smaller than
necessary, elimination starts earlier, possibly discard-
ing good hypotheses that just have not been tested
enough to estimate their scores accordingly. On the
other hand, if the block size is larger than required, a
considerable number of tests may be done over use-
less hypotheses or the tests may not performed in the
whole block, thus failing to reject any of the gener-
ated hypotheses and being the same as applying the
standard RANSAC with breadth scoring.
Nist
´
er determines experimentally that a block size
of 100 observations reaches a good balance. As we
mentioned before, one should be aware that balance
is a matter of hardware setup. Thus, we will show ex-
perimentally that different hardware setups will have
different associated optimal block sizes.
Finally, the fraction of hypotheses to be removed
in each rejection round determines the amount of hy-
potheses that will be discarded. Since the hypotheses
are scored for every evaluation step until reaching the
block size, a fixed number of the hypotheses with the
lowest scores are eliminated.
The P-RANSAC adopts a rejection ratio of half of
the available hypotheses reducing rapidly the number
of hypotheses to analyze. The concept seems promis-
ing, but we decided to investigate the impact of chang-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
408

ing this value, since the changes in the other parame-
ters may affect this choice.
3 METHODOLOGY
We made the option for simulating using synthetic
data in order to have a groundtruth reference to com-
pare the algorithms accordingly. The first set of simu-
lations was planned to compare P-RANSAC and GPR
in a powerful hardware as a way to compare them
fairly and demonstrate that the original values of pa-
rameters used in P-RANSAC are not the unique pa-
rameter setup that works well with the balanced Pre-
emptive RANSAC. Thus, we did not focused in sur-
passing P-RANSAC performance, but in achieving a
set of parameters that aids us to prove such concept.
A second round of simulations were performed
using a low budget hardware in order to demonstrate
the slow decreasing of accuracy when using GPR as
opposed to the high error results produced when using
P-RANSAC.
A total of 1000 replications were simulated for
each setup. We modified the simulator developed by
ˇ
Segvi
´
c and used in his works for performance (
ˇ
Segvi
´
c
et al., 2007b) and accuracy (
ˇ
Segvi
´
c et al., 2007a) eval-
uations. The original code
1
uses the library Boost
2
and the Oxford Active Vision Lab VW34
3
.
Table 1 presents a total of six time budgets we de-
fined to evaluate, covering a number of possible time
restrictions that seems feasible for a wide range of
applications. The simulation setups were planned in
order to allow fair comparisons between P-RANSAC
and the tuned GPR. To reach this goal we fixed some
simulation parameters while the experimental param-
eters have their values determined and tested in each
simulation setup.
Simulation parameters that remained fixed along
all the experiments were the number of observations
(1000), the five point hypotheses generation algo-
rithm (Nist
´
er, 2004), (Li and Hartley, 2006), (
ˇ
Segvi
´
c
et al., 2007b) and Gaussian white noise (σ = 1).
We planned to vary the number of observations,
but not significant influence had been detected from
such variation; thus, we fixed the number of obser-
vations to be equal to the number originally used in
P-RANSAC. The option for five point algorithm was
natural since it was firstly used in the P-RANSAC and
1
Available at http://www.zemris.fer.hr/∼ssegvic/src/
evalpose.tar.gz
2
Available at http://www.boost.org/
3
Available at http://www.doc.ic.ac.uk/∼ajd/Scene/
Release/vw34.tar.gz
Gaussian white noise was used since it is very dissem-
inated in vision systems testing when working with
synthetic data.
Table 1 presents the parameters used in the exper-
iments which were chosen to represent several appli-
cation requirements’ scenarios. We used two types
of synthetic motion (forward and side-wise) in order
to collected the Translational Error (TError) of each
algorithm in both circumstances. The motions were
not combined and TError was computed separately
by decomposing the winner hypothesis into the ro-
tation matrix and translation vector, with the vector
being used to determine the angular error concerning
the ground truth vector.
The sets of generated hypotheses were used by
both algorithms and scores were computed summing
up reprojection error of every available hypothesis for
a certain number of observations. In order to make
sure that all the hypotheses have the same number of
tests in the case of preemption by time expiration, the
error for a given observation is computed for all hy-
potheses before moving on to another observation.
We altered the hypotheses generation step to deal
with the variable MNHG and, as a consequence, we
included an extra test that prevents the generation of
extra hypotheses if it reaches the determined MNHG.
This allowed both algorithms to add the remaining
time from generation task to the one third of budget
assured by default to the evaluation step.
The experiments performed to validate and test
our method were the following:
1. Validation of the method, where we executed ex-
periments using both algorithms with the same pa-
rameters to confirm that both algorithms produce
identical results.
2. Adjustment of the method, where we executed
experiments with adjusted parameters in GPR, but
using standard maximum for hypotheses genera-
tion (500).
3. Test Scenario 1, where we executed experiments
with different maximum number of hypotheses (5
× budget, given in µs) for each budget and with
adjusted GPR parameters.
4. Test Scenario 2, where we executed experiments
with different maximum number of hypotheses (5
× budget) for each budget and with adjusted GPR
parameters in a low-budget hardware.
The validation experiments confirmed that using
the same parameters in both P-RANSAC and GPR
produce identical results, as it should be. The result
of experiments in the other three experiments are pre-
sented in the next section.
GeneralizedPreemptiveRANSAC-MakingPreemptiveRANSACFeasibleeveninLowResourcesDevices
409
Table 1: Time budgets and their relationships in the experimental setup (MGT stands for Maximum Generation Time and
MET stands for Maximum Evaluation Time).
Budget MGT MET MNHG
(ms) Hz (budget×0.667) (budget×0.333) (budget×5)
16.667 60 11.116889 5.550111 83.335
33.333 30 22.233111 11.099889 166.665
40 25 26.68 13.32 200
50 20 33.35 16.65 250
66.667 15 44.466889 22.200111 333.335
100 10 66.7 33.3 500
4 EXPERIMENTS
The experiments were performed according the sim-
ulation methodology described in the previous sec-
tion. The hardware used in the experiments consisted
of one powerful computer and one low-budget com-
puter for the current standards. The first computer
is equipped with an Intel Core i7 second generation
processor running at 3.07 GHz that, despite having 8
cores, had the processes launched in a Windows 7,
single-threaded console to perform all the process-
ing. The second computer is equipped with a AMD
A6-3400M processor quad core CPU, running at 1.40
GHz, in which we also launched the processes in a
Windows 7, single-threaded console.
We made the option for using single-thread pro-
cess in order to make simple and fair comparisons.
Since only one thread is available, it is simpler to
reproduce the simulations under the same conditions
and check the performance even in distinct hardware
setups and/or architectures. This also minimizes the
possible impact of any other process that may be
started by the operating system.
As mentioned in the previous Section, four experi-
ments were performed. The first experiment was used
only to validate the results our approach. The results
of the other three experiments are now presented in a
total of three tables. These tables include information
about time budget, GPR block size, GPR rejection
fraction, the average number of generated hypotheses,
and the average error for both GPR and P-RANSAC,
and for both forward and side-wise motions.
The Table 2 shows the results of the experiments
for both forward and side-wise motions with the orig-
inal MNHG value run on the more powerful device,
while Table 3 shows the results of the same experi-
ments but with the modified MNHG running in the
same device. Finally, Table 4 shows the results with
the modified MNHG, but when run in the low-budget
device.
5 DISCUSSION
The results show that our hypothesis is correct, i.e.,
that one can find parameters that may balance the pre-
emption scheme and produce better results than by
using the standard values originally selected for P-
RANSAC. They also demonstrate that our assumption
about MNHG is plausible, since the TError presented
small variability in some cases and a bit wider in oth-
ers.
The results of the experiments show that when the
GPR parameters are well tuned, the variability of its
results is smaller than the P-RANSAC results. We
can also infer from the results that the GPR accuracy
was consistent in every scenario. That does not means
that GPR produced the best results in all tests, but that
its flexibility allows it to be tuned so it can be used
for a particular configuration of application, time con-
straints and hardware.
We plotted the average errors for the forward and
the side-wise motions for both algorithms. In Figures
1 and 2 we show the results for the more powerful ma-
chine. We did not include the results of P-RANSAC
with the modified MNHG scenario in order to pre-
serve the scale of the graph, since it reached values
around five times larger than the other ones.
Figures 3 and 4 compare the results of GPR and P-
RANSAC in the modified MNHG scenario in the low-
budget device. Actually, the results of P-RANSAC
in the modified MNHG scenario are similar for both
devices, thus, the average translational errors for the
more powerful machine that were not included in Fig-
ures 1 and 2 can be inferred from the results shown on
Figures 3 and 4.
Figure 1 confirms the possibility of achieving sim-
ilar results by using GPR with different parameters
selection than of the standard setup, and that the GPR
with modified value for MNHG showed less variation
in the average error relative to the variation of time
budget.
The first charted point of Figures 1 and 2 present
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
410
Table 2: Experiments with original value of MNHG. (FtR stands for Fraction to Remove).
Forward Motion side-wise Motion
Average Average Average Average Average Average
Budget GPR FtR Generated GPR P-RANSAC Generated GPR P-RANSAC
(ms) Block (%) Hypotheses TError (
◦
) TError (
◦
) Hypotheses TError (
◦
) TError (
◦
)
16.667 20 20 478.906 14.8458 8.31558 360.962 5.11734 5.66775
33.333 30 20 501.447 8.65899 5.94851 500.561 5.07457 4.8266
40 40 30 501.348 6.48244 6.3134 500.978 4.73236 5.08546
50 60 40 501.389 6.3561 6.15591 501.006 5.22747 4.96326
66.667 60 40 501.419 6.25041 5.92838 500.978 5.31673 4.64777
100 60 40 501.462 6.28521 16.925 501.039 5.38165 10.7852
Table 3: Experiments with modified MNHG. (FtR stands for Fraction to Remove).
Forward Motion side-wise Motion
Average Average Average Average Average Average
Budget GPR FtR Generated GPR P-RANSAC Generated GPR P-RANSAC
(ms) Block (%) Hypotheses TError (
◦
) TError (
◦
) Hypotheses TError (
◦
) TError (
◦
)
16.667 45 45 85.463 10.3403 46.6469 84.989 6.98301 55.4828
33.333 50 65 168.352 7.70724 45.871 167.978 5.95346 53.8409
40 50 65 201.395 7.36652 44.975 200.974 5.6052 53.8277
50 45 50 251.401 7.35803 42.8753 250.966 5.33252 52.456
66.667 45 50 335.423 6.67942 44.4866 334.997 4.91618 56.4664
100 45 50 501.37 6.37809 45.0267 500.984 4.79571 55.9154
Table 4: Experiments with modification in the maximum number of hypotheses to generate, forward motion. (FtR stands for
Fraction to Remove).
Forward Motion side-wise Motion
Average Average Average Average Average Average
Budget GPR FtR Generated GPR P-RANSAC Generated GPR P-RANSAC
(ms) Block (%) Hypotheses TError (
◦
) TError (
◦
) Hypotheses TError (
◦
) TError (
◦
)
16.667 20 20 85.36 15.1992 45.763 85.029 7.51641 56.8997
33.333 30 20 168.505 11.4411 46.0835 167.963 6.11811 52.2122
40 40 40 201.454 8.08279 44.578 200.989 5.62041 56.5226
50 60 40 251.445 7.59762 44.9756 250.954 5.80402 51.546
66.667 60 40 335.426 6.79015 44.9835 334.985 5.61065 51.5363
100 60 40 501.355 6.26112 43.1999 500.959 5.29221 53.072
an isolated degenerated behavior of P-RANSAC. In a
deeper investigation, we detected that the degeneracy
is the effect of the unbalanced amount of hypotheses
and the maximum number of tests that leaded to a sce-
nario in which the algorithm discarded an insufficient
amount of hypotheses to enforce the estimation qual-
ity.
Figure 2 shows a similar behavior of all three al-
gorithms, except for the GPR with standard MNHG
when the time budget is lowered for forward motion.
We also found out that the GPR with standard MNHG
was more robust for lower budgets in side-wise mo-
tion, since it did not show any significant error in-
crease.
We have shown that one can use GPR with differ-
ent hardware configurations and constraints, in cases
where the P-RANSAC fails to produce good results.
An important detail is that the specific balance we
achieve here is related to the hardware configuration
used. Different hardware configurations may, and
most certainly will, have a different set of optimal pa-
rameters.
It is necessary to mention the two main obsta-
cles for tuning the GPR parameters. As would be
expected, the first and bigger difficulty is the com-
binatorial nature of optimization. We used a semi-
automated brute force scheme to find promising com-
bination of parameters yielding good results.
The other problem is that a balanced setup for a
particular hardware configuration is not guaranteed to
work properly for a different configuration, leading to
the search of a new set of parameters for that particu-
GeneralizedPreemptiveRANSAC-MakingPreemptiveRANSACFeasibleeveninLowResourcesDevices
411
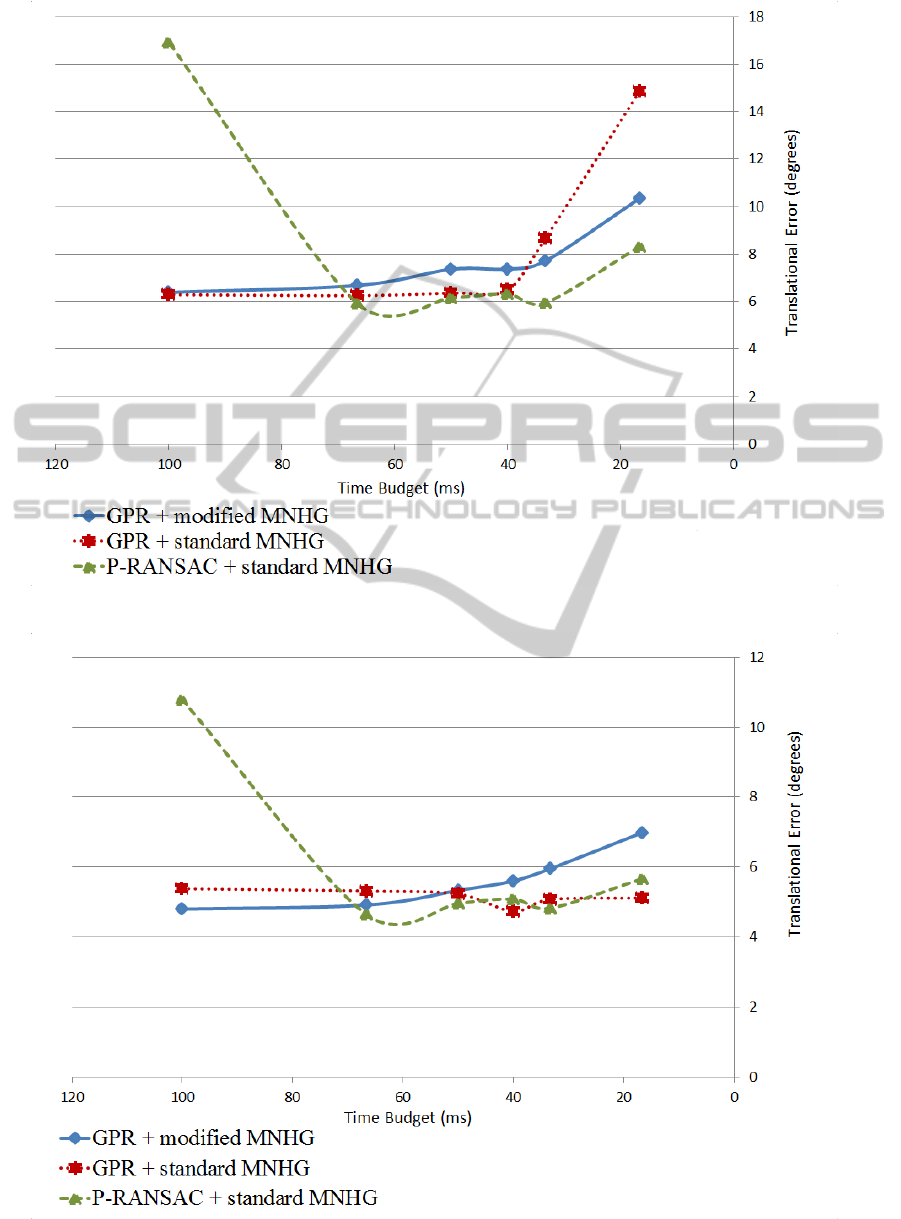
Figure 1: Time budget x Translational error in degrees (forward motion).
Figure 2: Time budget x Translational error in degrees (side-wise motion).
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
412
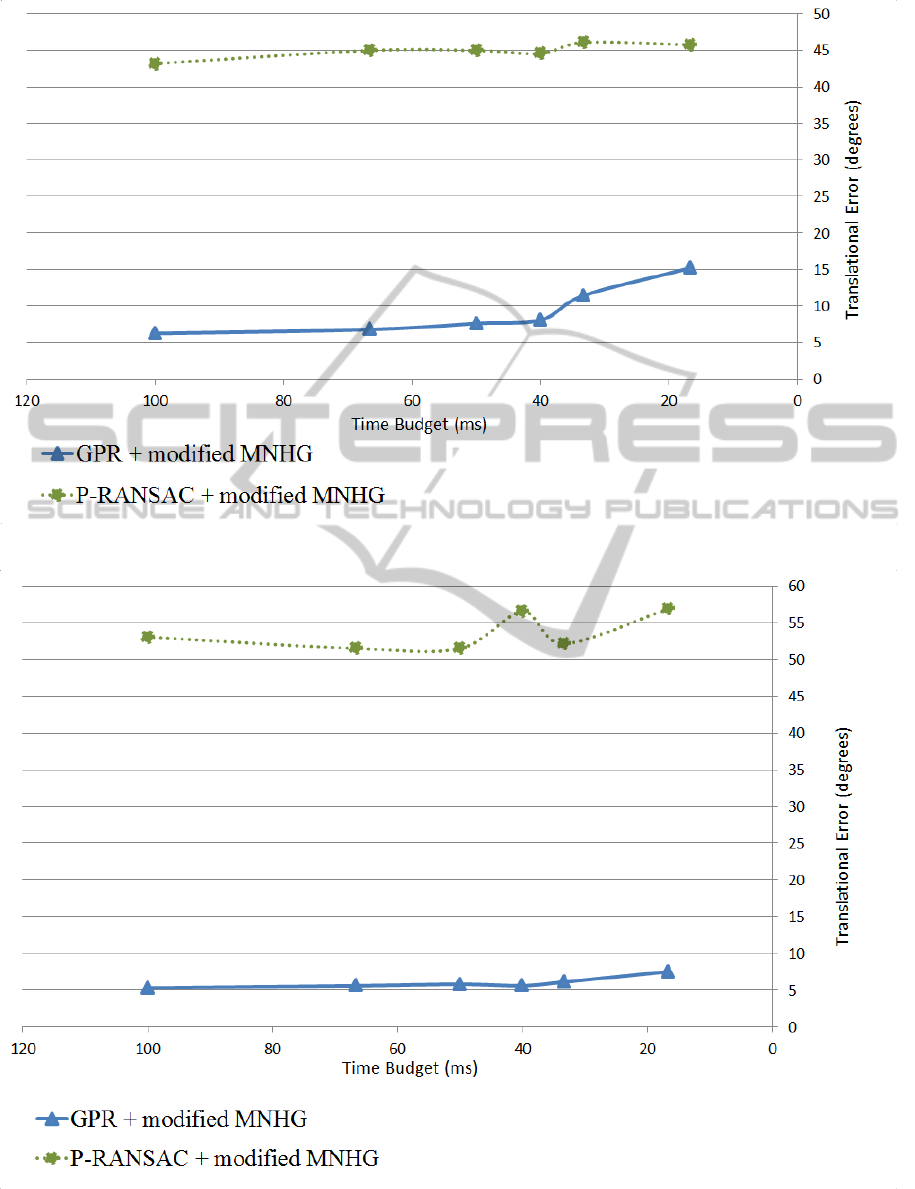
Figure 3: Time budget x Translational error in degrees (forward motion) in a modest device.
Figure 4: Time budget x Translational error in degrees (side-wise motion) in a modest device.
GeneralizedPreemptiveRANSAC-MakingPreemptiveRANSACFeasibleeveninLowResourcesDevices
413

lar hardware configuration. However, once the budget
and the parameters have been defined for a particular
hardware configuration, they can be used for any in-
stance of such system.
6 CONCLUSIONS
In this paper, we proposed the usage of the General-
ized Preemptive RANSAC (GPR), that can be seen
as a generalization of the Preemptive RANSAC (P-
RANSAC), and can be applied successfully to dif-
ferent hardware configurations, specifically to low-
budget hardware configurations.
We concentrated in validate our approach in a con-
trolled scenario in order to assure a high level of confi-
dence in the results since we have the ground truth as a
reference for the comparisons along the several exper-
iments we have performed. The use of two-view ge-
ometry and a single model (cloud of points projected
in two synthetic frames) demonstrated to be adequate
to our needs.
We tested the algorithms on synthetic data, an-
alyzing the average translational error produced for
several time budgets, in order to simulate different
time constraints required by applications with differ-
ent objectives. The flexibility of the GPR allowed
it to maintain lower average error rates even in the
low-budget hardware configuration used. This means
that the flexibility of GPR allows a number of com-
puter/robot vision applications to be developed even
when using modest hardware setups.
Future works include a deeper study of the param-
eter setup to correlate the information and try to esti-
mate a model that can give a range of values for the
model’s parameters in order to decrease the need for
human intervention and decrease the amount of time
needed for the parameter setup. At the end, we ex-
pect to deliver a system able to run a calibration step
in the hardware setup that aids the determination of
adequate parameters for a given time budget in the
selected device. New experiments are been conducted
using real pairs of images to compare the performance
of both approaches under such conditions.
We also plan to investigate the finding of several
motion models in a single image pair, as well as com-
bining some hypotheses generation methods (e.g. 5-
point, 8-point and homography) in the generation step
in order to promote diversity of hypotheses. This will
make GPR adapted to work with a variable number
of models. We expect that this will provide more re-
liability in the estimation since each model’s motion
may be best estimated by distinct types of hypotheses,
i.e. computed by distinct generation methods, such
as backgrounds mapped by homographies and other
objects mapped by the 8-point algorithm in forward
motion (which surpasses 5-point in such conditions
(
ˇ
Segvi
´
c et al., 2007a)).
Finally we plan to perform tests with other hard-
ware platforms, specially those low budget processors
which are been used in autonomous robot vision im-
plementations.
ACKNOWLEDGEMENTS
The authors would like to express gratitude to Profes-
sor Sini
ˇ
sa
ˇ
Segvi
´
c from the University of Zagreb for
all his help and for providing us with his simulation
code, on which we built on. Bruno M. Carvalho is
supported by FAPERN/CNPq PRONEM Grant.
REFERENCES
Chum, O. and Matas, J. (2005). Matching with PROSAC
- Progressive Sample Consensus. In Proceedings of
the 2005 IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition (CVPR’05) -
Volume 1 - Volume 01, CVPR ’05, pages 220–226,
Washington, DC, USA. IEEE Computer Society.
Chum, O. and Matas, J. (2008). Optimal Randomized
RANSAC. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 30(8):1472–1482.
Fischler, M. A. and Bolles, R. C. (1981). Random Sam-
ple Consensus: A Paradigm For Model Fitting With
Applications to Image Analysis and Automated Car-
tography. Commun. ACM, 24(6):381–395.
Gomes-Neto, S. and Carvalho, B. M. d. (2010). BRUMA:
Generalizing All Preemption Functions. In Proc. IWS-
SIP, pages 380–383.
Konouchine, A., Gaganov, V., and Veznevets, V. (2005).
AMLESAC: A New Maximum Likelihood Robust Es-
timator. In In Proc. Graphicon05, pages 93–100.
Li, H. and Hartley, R. (2006). Five-Point Motion Estima-
tion Made Easy. In Proceedings of the 18th Inter-
national Conference on Pattern Recognition - Volume
01, ICPR ’06, pages 630–633, Washington, DC, USA.
IEEE Computer Society.
Michaelsen, E., von Hansen, W., Meidow, J., Kirchhof, M.,
and Stilla, U. (2006). Estimating The Essential Ma-
trix: GOODSAC versus RANSAC. In Symposium of
ISPRS Commission III: Photogrammetric Computer
Vision, pages 161–166.
Nist
´
er, D. (2003). Preemptive RANSAC for Live Structure
and Motion Estimation. In Proceedings of the Ninth
IEEE International Conference on Computer Vision -
Volume 2, ICCV ’03, pages 199–, Washington, DC,
USA. IEEE Computer Society.
Nist
´
er, D. (2004). An Efficient Solution to the Five-Point
Relative Pose Problem. IEEE Trans. Pattern Anal.
Mach. Intell., 26(6):756–777.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
414

Raguram, R., Frahm, J.-M., and Pollefeys, M. (2008). A
Comparative Analysis of RANSAC Techniques Lead-
ing to Adaptive Real-Time Random Sample Consen-
sus. In Forsyth, D., Torr, P., and Zisserman, A., edi-
tors, Computer Vision ECCV 2008, volume 5303 of
Lecture Notes in Computer Science, pages 500–513.
Springer Berlin Heidelberg.
Rodehorst, V. and Hellwich, O. (2006). Genetic Algo-
rithm SAmple Consensus (gasac) - A Parallel Strat-
egy for Robust Parameter Estimation. In Proceedings
of the 2006 Conference on Computer Vision and Pat-
tern Recognition Workshop, CVPRW ’06, pages 103–,
Washington, DC, USA. IEEE Computer Society.
Torr, P. H. S. and Zisserman, A. (2000). MLESAC: A New
Robust Estimator with Application to Estimating Im-
age Geometry. Computer Vision and Image Under-
standing, 78:2000.
Vedaldi, A., Jin, H., Favaro, P., and Soatto, S. (2005).
KALMANSAC: Robust Filtering by Consensus. In
ICCV, pages 633–640. IEEE Computer Society.
ˇ
Segvi
´
c, S., Schweighofer, G., and Pinz, A. (2007a). In-
fluence of numerical conditioning on the accuracy of
relative orientation. In CVPR. IEEE Computer Soci-
ety.
ˇ
Segvi
´
c, S., Schweighofer, G., and Pinz, A. (2007b). Per-
formance evaluation of the five-point relative pose
with emphasis on planar scenes. In Performance
Evaluation for Computer Vision, pages 33–40, Aus-
tria. Workshop of the Austrian Association for Pattern
Recognition.
GeneralizedPreemptiveRANSAC-MakingPreemptiveRANSACFeasibleeveninLowResourcesDevices
415
