
Visualization of Remote Sensing Imagery by Sequential Dimensionality
Reduction on Graphics Processing Unit
Safa A. Najim
1,2
and Ik Soo Lim
1
1
School of Computer Science, Bangor University, Bangor, Gwynedd, U.K.
2
Computer Science Dept., Science College, Basrah University, Basrah, Iraq
Keywords:
Visualization, Dimensionality Reduction, Remote Sensing Imagery, Graphics Processing Unit (GPU).
Abstract:
This paper introduces a new technique called Sequential Dimensionality Reduction (SDR), to visualize remote
sensing imagery. The DR methods are introduced to project directly the high dimensional dataset into a low
dimension space. Although they work very well when original dimensions are small, their visualizations are
not efficient enough with large input dimensions. Unlike DR, SDR redefines the problem of DR as a sequence
of multiple dimensionality reduction problems, each of which reduces the dimensionality by a small amount.
The SDR can be considered as a generalized idea which can be applied to any method, and the stochastic
proximity embedding (SPE) method is chosen in this paper because its speed and efficiency compared to other
methods. The superiority of SDR over DR is demonstrated experimentally. Moreover, as most DR methods
also employ DR ideas in their projection, the performance of SDR and 20 DR methods are compared, and the
superiority of the proposed method in both correlation and stress is shown. Graphics processing unit (GPU)
is the best way to speed up the SDR method, where the speed of execution has been increased by 74 times in
comparison to when it was run on CPU.
1 INTRODUCTION
Visualization of high dimensional dataset is widely
used in many fields including remote sensing imagery,
biology, computer vision, and computer graphics in
order to analyze them (Blum and Liu, 2006). The di-
mensionality reduction (DR) method is one of the best
strategies used in this matter by projecting high di-
mensional space onto lower dimensional space where
they can be visualized directly. The colour of each
pixel in the visualization is a compendium of infor-
mation in the original data in which their most salient
features are captured (Kaski and Peltonen, 2011) (Pel-
tonen, 2009).
Nonlinear projection has received significant at-
tention in modern DR methods due to its intrinsic
ability to generate visualization with respect to prox-
imity between instances of data (Lawrence et al.,
2011) (Mokbel et al., 2013). They have the advan-
tage of perfect colours, which in turn often have clear
meanings. In contrast, linear projection generates
poor and worst interpretations of large datasets (Tyo
et al., 2003) (Steyvers, 2002). The task of DR is vi-
sualization of neighbourhood or proximity relation-
ships within a high dimensional space. The visualiza-
tion should allow the user to retrieve the neighbour-
ing data points in original space. Perfect neighbour-
hood preserving is usually not possible, and applying
the DR method makes two kinds of errors: decreas-
ing continuity neighbourhood, and increasing false
neighbourhood (Lespinats and Aupetit, 2011). In
false neighbourhoods, a large distance between origi-
nal data points becomes a small distance in the lower
dimensional space, which have the same colour in vi-
sualization, as in Figure 1. Thus, the colours of vi-
sualization have no meaning because the straightfor-
ward relationship with original high dimension space
is lost (Bachmann et al., 2005).
Due to the difference between the topological
structure of data points in high dimension space with
the topological structure of projected space, it is diffi-
cult to preserve the neighbourhood relations between
data points. Eventually, the way of applying DR it-
self is not perfect. Loss of any neighbour point could
lead to an increase in the the amount of error be-
cause the missing neighbour point will occupy a place
of another point in the lower space. Therefore, the
amount of error could be growing explosively when
increasing the false neighbourhood. Overlap between
points is the dominate thing when direct projection
71
Najim S. and Lim I..
Visualization of Remote Sensing Imagery by Sequential Dimensionality Reduction on Graphics Processing Unit.
DOI: 10.5220/0004737500710079
In Proceedings of the 5th International Conference on Information Visualization Theory and Applications (IVAPP-2014), pages 71-79
ISBN: 978-989-758-005-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
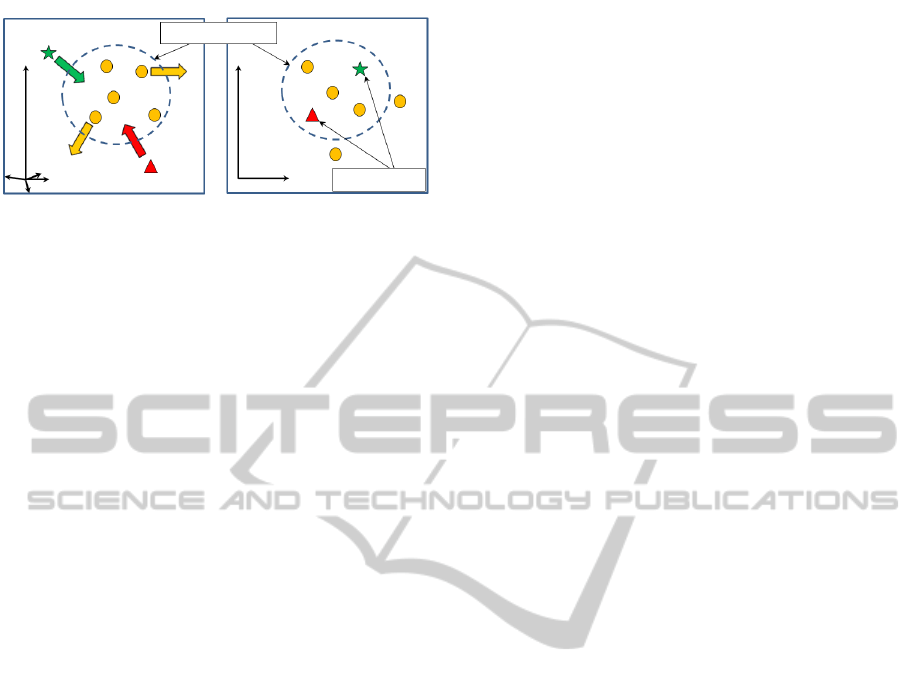
High dimensional space Low dimensional space
Local neighborhood
False neighbors
x
i
y
i
Figure 1: DR might cause the points which are outside lo-
cal neighborhood in high dimension space to be inside lo-
cal neighborhood in low dimension space. These points are
called false neighborhood.
from high dimension space to lower dimension space
is still used.
This work proposes a novel DR method, called
Sequential Dimensionality Reduction (SDR), which
is used to optimize the quality of visualization as a
sequence of multiple dimensionality reduction prob-
lems, each of which reduces the dimensionality by a
small amount. In contrast to the DR method, SDR
preserves the neighbourhood relations between data
points of two reduced consecutive spaces. Thus, false
neighbourhoods are reduced as much as possible.
This paper is organized as follows: Section 2 gives
some ideas about related works. In section 3, method-
ology of proposed method is explained. Experimental
results are dominated in section 4. Finally, the conclu-
sion is drawn in section 5.
2 RELATED WORK
2.1 Visualization by DR
The technique of DR is useful to visualize and analyse
that large volume of data. For a set of n input points
X ∈ ℜ
D
, φ(X) is used to project the D dimensional
data points (x
i
∈ X) to d dimensional data points (y
i
∈
Y ):
φ : ℜ
D
→ ℜ
d
(1)
x
i
7→ y
i
∀ 1 ≤ i ≤ n (2)
In equation 1, φ attempts to approximate
the input pairwise distance r(x
i
,x
j
) with their
corresponding in projected space d(y
i
,y
j
), i.e,
r(x
i
,x
j
) ≈ d(y
i
,y
j
) ∀ 1 ≤ i ≤ n to project X’s
data point correctly in Y space. Loss of preserv-
ing neighborhood relations should be minimized, i.e.
Ξ(φ(X)) ≈ X, where Ξ : ℜ
d
→ ℜ
D
. Thus, DR at-
tempts to minimize Equation 3.
Stress(φ) =
n
∑
i, j=1
(r
i j
− d
i j
)
2
(3)
where r
i j
= ||x
i
− x
j
|| and d
i j
= ||y
i
− y
j
||.
The variety of strategies have resulted in the de-
velopment of many different DR methods. Linear and
nonlinear DR methods are the best examples to de-
scribe them.
Linear projection: Principle components analysis
(PCA) uses orthogonal linear combination to find lin-
ear transformation space of data set. Because of its
simplicity, it is used for data visualization (Jolliffe,
2002). Other visualization methods aim to preserve
distances, such as multidimensional scaling (MDS)
(Borg and Groenen, 1997). It computes distance ma-
trix among points by computing pairwise Euclidean
distances. PCA and MDS fail to find satisfactory low
dimension representation of nonlinear data.
Nonlinear projection: Modern DR methods usually
use nonlinear projections to project the data into low
dimensions. Kernel PCA (Shawe-Taylor and Cris-
tianini, 2004) is a nonlinear version of PCA, and iso-
metric feature mapping (Isomap) (Tenenbaum et al.,
2000) uses geodesic distance rather than Euclidean
distance in MDS. Other methods use local linear re-
lationships to measure the local structure, as in lo-
cal linear embedding (LLE) (Roweis and Saul, 2000),
maximum variance unfolding (MVU) preserves di-
rect neighbours while unfolding data (Weinberger and
Saul, 2006), and laplacian eigenmaps (Belkin and
Niyogi, 2002) take a more principled technique by
referring to the spectral properties of the resulting
dissimilarity matrix. Some methods, like stochas-
tic neighbor embedding (SNE) (Bunte et al., 2012),
t-distributed stochastic neighbor embedding (t-SNE)
(Maaten and Hinton, 2008) and neighborhood re-
trieval visualizer (NeRV) (Venna et al., 2010), attempt
to match probability distributions induced by the pair-
wise data dissimilarities in the high dimensional space
and low dimension space, respectively. Stochastic
proximity embedding (SPE) proceeds by calculating
Euclidean distance for global neighbourhood points
within fixed radius (Agrafiotis et al., 2010). It is an
enormous step in computational efficiency over MDS,
and faster than Isomap.
Many solutions to visualize dataset in DR have
been proposed (Maaten et al., 2009), but fewer so-
lutions exist to overcome false neighbourhoods. The
preserving neighbourhood relations by DR remains a
matter of controversy between researchers.
IVAPP2014-InternationalConferenceonInformationVisualizationTheoryandApplications
72

2.2 Quality of Visualization
When measuring the quality of visualization for a
given dataset it is important to know which DR
method is best suited for the task at hand. Further-
more, humans cannot compare the quality of a given
visualization with original data by visual inspection
due to its high dimensionality. Thus, the best formal
measurements should evaluate the amount of preserv-
ing neighbourhood colour distances in the visualiza-
tion with their corresponding in original data. Cor-
relation (ρ) and residual variance (RV ) are the well-
known methods used in this matter. If we suppose X
is a vector of all pairwise distance of the data points in
original space and Y is a vector of their corresponding
pairwise colour distances in visualization, then their
definitions are:
Residual Variance (RV ) is a function used to com-
pute the standard error of difference between visual-
ization and original space (Tenenbaum et al., 2000). It
calculates the sum of squares of differences between
original data point distances and projected colour dis-
tances, as in equation 4.
RV =
s
∑
(X −Y )
2
N − 2
(4)
where N is length of X vector. By Equation 4, small
stress value indicates that visualization has very little
error and higher efficiency.
In Correlation function (γ), the linear correlation be-
tween original input distances and colour distances
in visualization is computed (Mignotte, 2012). The
value of correlation is equal to 1 when all distances
between two vectors are perfect preserved with posi-
tive slope. In the other hand, the value equal to -1 if
the two vectors have prefect linear relationship with
negative slope. The correlation is defined by:
γ =
X
T
Y /|X| − X Y
σ
X
σ
Y
(5)
where |X| is the length of X, and X and σ
X
are the
mean and standard deviation of X, respectively.
2.3 Visualization of Remote Scening
Imagery
Remote scening imagery is a well-known technique
to observe the earth and urban scenes by producing a
large number of spectral bands (Smith, 2012). How-
ever, the challenge is how to display the abundant in-
formation contained in these images in a more inter-
active and easy analysed way, such as in a 3-D im-
age cube. Due to the difficulty of using these huge
bands, several DR methods are produced to overcome
this problem by finding the best relationships among
colour values in three colour channels after applying
complex formulas to shrink the huge original space.
DR provides a good way to visualize hyperspectral
imagery by generating its colour image (Bachmann
et al., 2005) (Mignotte, 2012).
2.4 Graphics Processing Unit (GPU)
Recently, the processing power and memory band-
width of a new generation of graphics card
have emerged as a powerful computation platform
(Sanders and Kandrot, 2011). GPU has many pro-
grammable processors working in a highly parallel
style. Compute Unified Device Architecture (CUDA)
is the hardware and software NVIDIA parallel com-
puting architecture that is Integrated Development
Environment (IDE) such as Microsoft C++ Visual
Studio, to write the CUDA C++ program. It has two
types of functions: host and kernel. Host functions are
run in CPU to execute the sequential codes, and ker-
nel functions are responsible for the execution of the
parallel instructions inside GPU. Kernel function can-
not be called directly where it should be called from
host function. The GPU consists of a set of small
processing units (called threads) which are grouped
into blocks. Each thread has a small private memory,
and each block has memory to share their threads to-
gether. In addition, all GPU’s threads can access CPU
memory in a memory portion called global memory.
Threads in a block synchronize their cooperation in
accessing shared memory. Because the CPU consists
of a few cores for executing serial processing, CPU
and GPU construct a power combination which is de-
signed for parallel and serial performances.
3 METHODOLOGY:
SEQUENTIAL DR
The goal of the proposed method is to solve the DR
by finding a representation of N points in d space,
where its neighbourhood relationships are preserved
with their corresponding relations in original space.
To do that, we redefine the problem of DR as a se-
quence of multiple DR problems, each of which re-
duces the dimensionality by a small amount. We call
this Sequential Dimensionality Reduction (SDR).
More specifically, given X = x
1
,x
2
,..., x
n
be a
data with instances x
i
∈ ℜ
D
. SDR attempts to do the
VisualizationofRemoteSensingImagerybySequentialDimensionalityReductiononGraphicsProcessingUnit
73
x
1
x
1
x
1
x
1
Local
neighborhoods
p
j
p
j
p
j
p
j
x
2
x
2
x
2
x
2
x
3
x
3
x
3
x
3
x
D−2
x
D−2
x
D−2
x
D−1
x
D−1
x
D
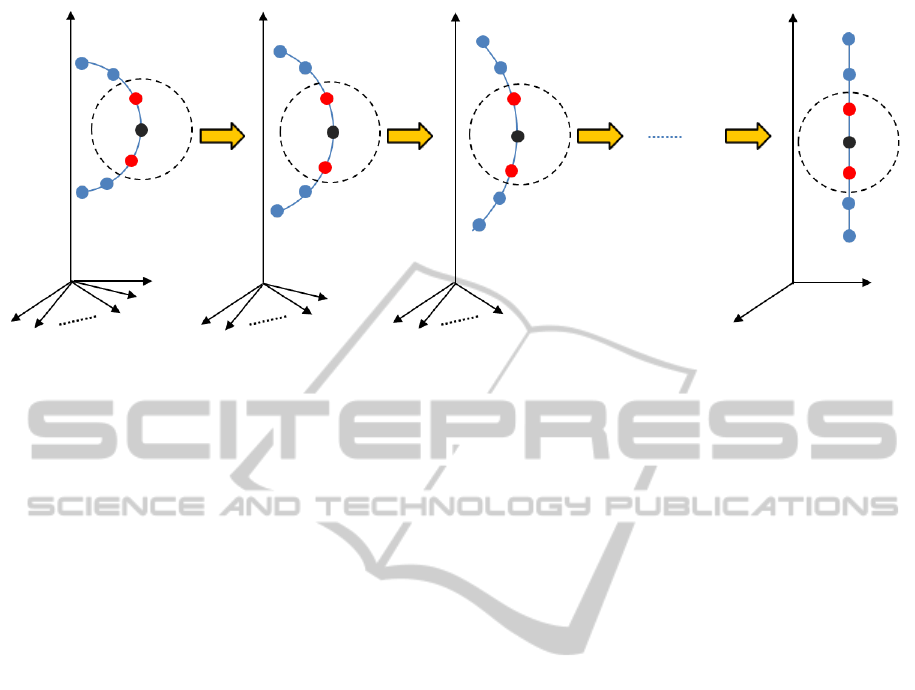
Figure 2: SDR redefines the problem of DR as a sequence of multiple DR problems, each of which reduces the dimension-
ality by a small amount. When amount of dimensionality reduction is equal to 1, the amount of losing information when
transforming from v space to v − 1 space is very few, where v ∈ {D,D −1, D − 2,..., d +1}. The neighborhoods of point p
j
is
preserved in D − 1, D − 2, ..., and d spaces.
transformation in equation 6.
G : ℜ
D
G
1
−→ ℜ
D−1∗S
G
2
−→ ℜ
D−2∗S
G
3
−→ ℜ
D−3∗S
..
G
k
−→ ℜ
d
(6)
where D >> d, and S is the step of dimensionality re-
duction can be in the range [1, D − 1].
The transformation (G
i
) attempts to project N points
of (D − (i − 1) ∗ S) space into (D − i ∗ S) space. The
transformation between two spaces is reasonably as
close as possible because of the similarity of dimen-
sionality between two spaces. Thus, the problem for
(D − i ∗ S) space is solved. Efficiency of transforma-
tion permits to recursively apply it until the target di-
mension is obtained. Therefore, the neighbourhood
relations between original points are kept carefully
through a sequence of transformations until it obtains
d space.
Figure 2 shows the general idea of the SDR when
S = 1. The point p
j
in the v space is able to preserve
its neighbour relationships when it is projected to the
v −1 space. Thus, the amount of false neighbourhood
when G
v
: ℜ
v
→ ℜ
v−1
is very small because the dif-
ference between the two spaces is just one dimension.
A complete transformation from D space to d spaces
is obtained by applying equation 6.
The point which should be discussed is how to
choose S. As we defined before, S can be in the range
[1, D − 1]. For higher efficiency S = 1 , where the
intermediate transformation problem will be between
very close topology spaces. The error is minimized,
and the problem is defined as a D − 1 DR problem.
The efficiency is reduced when S > 1, and the worst
case when S = D −1 which is defined as one DR prob-
lem.
SDR accepts as input set of N points in D space, a
transformation function G, and the amount of dimen-
sionality reduction S. d is the dimension of lower
space which should be given. SDR algorithm recur-
sively reduces the dimensionality of a space until ob-
taining the target space, and the following steps de-
scribe that:
1. let v = D.
2. if v is equal to d
{Stop}
3. let v −S is the dimension of the next lower space.
4. N points of v space is projected in v − S space
by applying G : ℜ
v
→ ℜ
v−S
.
5. let v = v − S, and go to step 2.
Briefly, SDR put the projected points in the cor-
rect location in low dimension space, which leads to
a reduction in the amount of error and an increase in
the degree of compliance with original space. The ef-
ficiency of SDR is clearer when input dimension is
very high and target dimension is very low. We chose
the SPE method to be used with the SDR idea (to gen-
erate SSPE) because SPE has more advantages than
other methods, as we will see in next subsection.
The length of the execution time is one of the lim-
itations that is encountered with the SDR, therefore,
using GPU is the most appropriate way to overcome
this problem.
3.1 SPE
SPE is a nonlinear method and proceeds by calcu-
lating Euclidean distance for global neighbourhood
IVAPP2014-InternationalConferenceonInformationVisualizationTheoryandApplications
74

points within a fixed radius (r
c
) (Agrafiotis et al.,
2010). SPE is an enormous step forward in compu-
tational efficiency over MDS, and faster than Isomap.
SPE is used in different applications and has suc-
ceeded in getting satisfactory results (Ameer and Ja-
cob, 2012). The objective of SPE is to find a represen-
tation which has point’s distances which are identical
to their corresponding distances in high dimensional
space. The method starts by selecting a random point
from the original data, in time (t
k
) to be projected in
the low dimension space. Projection points means the
withdrawal of the neighbourhood points within fixed
radius (r
c
).
Projected space starts with initial coordinates, and
it is updated iteratively by placing y
j
onto the pro-
jected space in such a way that their euclidean dis-
tance (d
i j
= ||y
i
− y
j
||) is closed to the corresponding
distance (r
i j
= ||x
i
− x
j
||) in original high dimensions
space. Thus, SPE minimizes Equation 3. The points
in projected space are updated according to following
constraint:
i f (r
i j
≤ r
c
) or ((r
i j
> r
c
) and (d
i j
< r
i j
))
x
j
← x
j
+ λ(t
k
)
r
i j
− d
i j
d
i j
+ ε
(7)
where λ(t
k
) is learning rate at t
k
time, and ε a tiny
number used to avoid division by zero (we used
ε = 1x10
−8
.
SDR with SPE generates a new method, which we
call SSPE, which uses the idea of SDR and SPE’s
objective function. While SPE objective function is
proved by its minimized function (Agrafiotis et al.,
2010) when transforming D space to d space (D >>
d), SSPE will be minimizing for the same reasons be-
cause nothing is changed in relation between D and d
spaces.
4 EXPERIMENTAL RESULTS
In this section, the SDR and DR methods are evalu-
ated in quantitative and qualitative manners. The per-
formance of the proposed method is analysed using
remote sensing imagery dataset. The SDR idea is im-
plemented on SPE, which is called SSPE, and com-
pared with tradition SPE. The comparison SDR with
20 DR methods is also included, and Table 1 shows
information about those methods.
The implementations were carried out on a com-
puter which has Intel(R) Cores(TM) i5 CPU M520
2.4Ghz and NVIDIA GeForce GTX 280 with buffer
size 1024 MBytes. Matlab and Microsoft Visual Stu-
dio C++ 2008 Professional Edition with CUDA were
Table 1: Methods employed in comparison. The first col-
umn contains the name of methods, second column shows
the type (T) of method (linear (L) or nonlinear (NL)), third
column shows the source of reference and the symbol X
in the fourth column indicates the original codes (O) have
been used.
Method T Source O
PCA L (Jolliffe, 2002) X
CCA L (Demartines and Hrault,
1997)
CDA NL (Lee et al., 2004) X
Factor analysis NL (Darlington, 1999)
Fast MVU NL (Weinberger and Saul,
2006)
Hessian LLE NL (Donoho and Grimes,
2005)
Isomap NL (Tenenbaum et al.,
2000)
X
Kernel PCA NL (Shawe-Taylor and
Cristianini, 2004)
Laplacian NL (Belkin and Niyogi,
2002)
LDA L (Duda et al., 2001)
LLC NL (Shi and Malik, 2000)
LLE NL (Roweis and Saul,
2000)
X
LLTSA NL (Zhang et al., 2007)
LPP L (Zhi and Ruan, 2008)
LTSA NL (Zhang and Zha, 2004)
NPE NL (He et al., 2005) X
Prob PCA NL (Tipping and Bishop,
1999)
SPE NL (Agrafiotis et al., 2010) X
SNE NL (Bunte et al., 2012) X
tSNE NL (Maaten and Hinton,
2008)
X
used to write the codes. We used the AVIRIS Moffet
Field data set from the southern end of San Francisco
Bay, California, done in 1997 (AVIRIS, 2013). Be-
cause some methods cannot work with large dataset,
we divided this dataset into small regions, each one
with 300x300x224 pixels, and we selected 3 regions
of them.
Table 2 shows SSPE achieves more accurate cor-
relation and stress values. For all regions, the correla-
tion values by our proposed method are highest, and
same is also true for stress values in which it has given
lesser values.
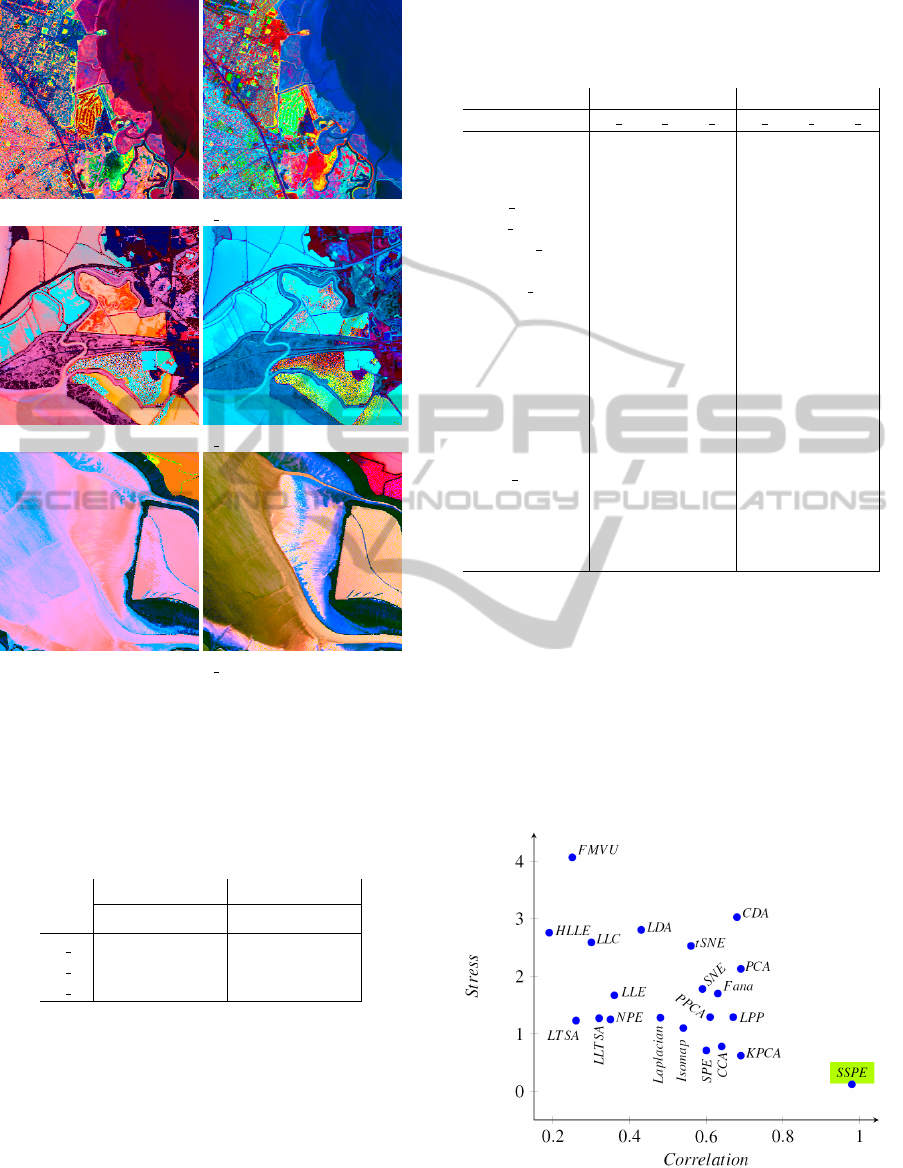
To compare the SDR and DR methods in a qualita-
tive manner, the visualizations of SPE and SSPE are
compared, as in the Figure 3. The performances of
the proposed method in previous table are conformed
here. For example, in the visualizations of regions
1, 2, and 3, SSPEs’ visualizations show more details,
VisualizationofRemoteSensingImagerybySequentialDimensionalityReductiononGraphicsProcessingUnit
75
(a) R 1
(b) R 2
(c) R 3
Figure 3: Visualizations of regions 1, 2, and 3 by using
SPE (in left side) and SSPE (on the right side). The SSPE’s
visualizations in all regions show more details than SPE’s
visualizations.
Table 2: Results of comparison the SDR method (repre-
sented by SSPE), when S = 1, with the DR method (repre-
sented by SPE). The proposed method got the highest cor-
relation and less stress values in all regions.
Correlation Stress
SPE SSPE SPE SSPE
R 1 0.696 0.998 0.033 0.022
R 2 0.641 0.966 1.504 0.261
R 3 0.813 0.989 1.102 0.131
which cannot be recognized by SPE. Let us explain
that with this example, in the top right corner of the vi-
sualization of region 3, the area is incorrectly visual-
ized by SPE, but it has been well visualized by SSPE.
This is due to the fact the number of false colours are
higher than true colours in SPE’s visualization, which
effected the accuracy of that area. The same situation
occurs in the remaining regions where the proposed
method was proven to show the correct colours.
The results of comparisons of the proposed
Table 3: Correlation and stress values of comparisons
among 21 methods for three regions. SSPE , when S = 1,
is the best in all cases, where it has higher correlation and
lesser stress values than other methods.
Correlation Stress
Method R 1 R 2 R 3 R 1 R 2 R 3
PCA 0.69 0.67 0.70 0.71 1.37 4.30
CCA 0.86 0.52 0.53 0.11 1.27 0.97
CDA 0.55 0.75 0.75 5.70 1.18 2.21
Fact analysis 0.83 0.42 0.65 0.90 3.88 0.32
Fast MVU 0.34 0.40 0.00 3.50 5.68 3.03
Hessian LLE 0.27 0.29 0.00 0.72 5.43 2.13
Isomap 0.53 0.65 0.45 0.72 1.13 1.44
Kernel PCA 0.70 0.77 0.59 0.44 0.96 0.46
Laplacian 0.24 0.62 0.58 1.08 1.77 0.97
LDA 0.26 0.43 0.59 1.86 1.04 5.53
LLC 0.24 0.34 0.32 2.42 1.84 3.52
LLE 0.33 0.37 0.37 0.71 1.45 2.86
LLTSA 0.32 0.43 0.21 1.08 1.75 0.97
LPP 0.75 0.61 0.66 1.12 1.78 0.97
LTSA 0.28 0.28 0.22 1.12 1.61 0.97
NPE 0.40 0.31 0.33 1.08 1.75 0.94
Prob PCA 0.47 0.64 0.72 0.76 1.30 1.80
SPE 0.69 0.64 0.81 0.03 1.50 1.10
SNE 0.40 0.64 0.73 2.56 1.56 1.23
tSNE 0.58 0.44 0.65 3.87 1.18 2.56
SSPE 0.99 0.96 0.98 0.02 0.26 0.13
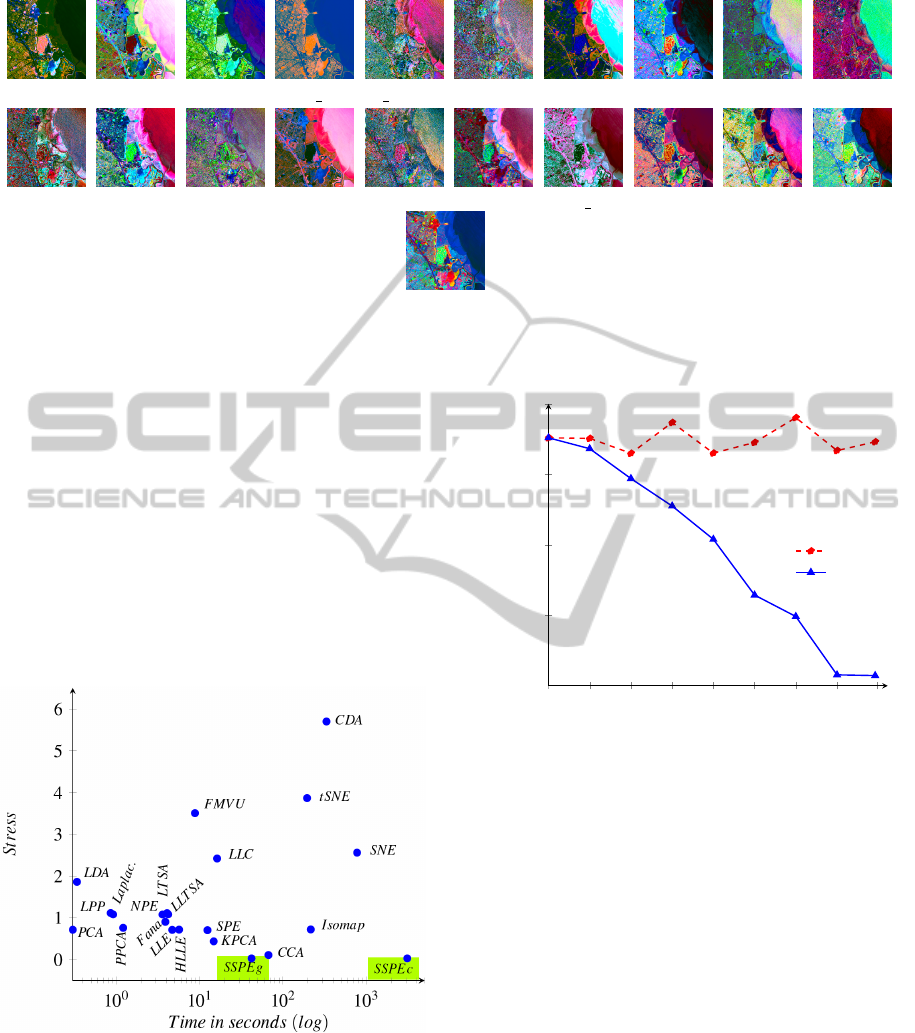
method with 20 DR methods for regions 1, 2 and 3 are
shown in Table 3, and Figure 4 shows the visualiza-
tions of region 1 by these methods. The results con-
firmed and supported our aforementioned discussion
about efficiency of the proposed method. Although
SPE is not the best among the other methods, SSPE is
much better than them in correlation and stress mea-
surement values. Figure 5 shows the highest corre-
lation and less stress measurement values, of average
values in Table 3, are got by SSPE.
Figure 5: The average of comparisons, in the Table 3, the
SSPE and 21 methods, SSPE is the best for getting the high-
est correlation and the least stress values, which are 0.98
and 0.14, respectively.
IVAPP2014-InternationalConferenceonInformationVisualizationTheoryandApplications
76
PCA CCA CDA Fact ana F MVU HLLE Isomap KPCA Laplacian LDA
LLC LLE LLTSA LPP LTSA NPE Prob PCA SPE SNE tSNE
SSPE
Figure 4: Visualization of region 1 by using 21 DR methods. According to the Table 3, the worst visualization is got by
Laplacian method, and SSPE’s visualization is the best visualization among them.
The speed is the next important item which should
be addressed. The DR idea is much faster than our
proposed method. Thus, GPU is the best way to speed
up the SDR method, that is, where the speed of exe-
cution has been increased by 74 times than when it
ran on CPU, as in the Figure 6. Thus, the speed prob-
lem that occurs in SDR is solved. Interestingly, the
consumed time by the proposed method is important
where the error is gradually lessened until it reaches
to be up to less than what can be. Figure 7 shows the
efficiency of the DR method (represented by SPE) is
not affected by increasing the iteration number.
Figure 6: The role of using GPU was very positive to in-
crease the speed of proposed method (SSPE) from 3107.147
seconds in CPU (which is called SSPE
c
) to 42.049 seconds
in GPU (which is called SSPE
g
). Thus, the execution speed
of SDR is acceptable when comparing that with those of
other methods.
Even though our method gave good results when
the sequences of multiple dimensionality reduction
10
3
10
3.3
10
3.6
10
3.9
10
4.2
10
4.51
10
4.81
10
5.11
10
5.4
0
0.2
0.4
0.6
0.8
Iteration (log)
Stress
SPE
SSPE
Figure 7: SPE and SSPE use the same number of iterations.
In SPE, there is no significant impact on the change in SPE’s
efficiency through iterations, but the stress is reduced grad-
ually with SSPE.
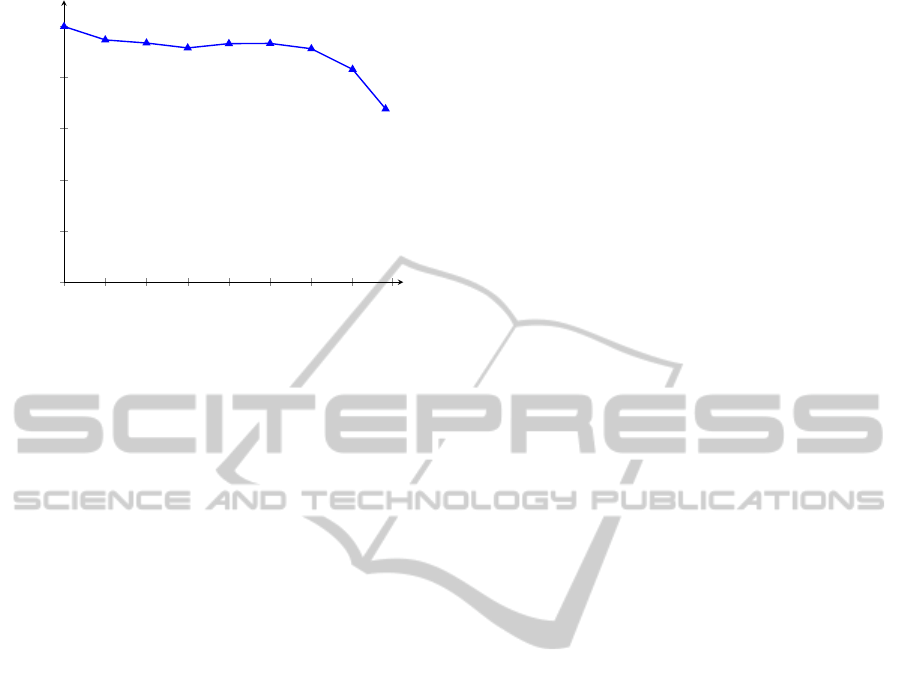
are reduced by amount equal to one, this amount can
be larger than one. However, the efficiency of SDR is
reduced when S is increased, as in Figure 8.
5 CONCLUSIONS
A new method called SDR has been proposed in this
paper to visualize remote sensing imagery. Theoreti-
cally, we illustrated that SDR maintains and preserves
the relations among neighbour points in low dimen-
sionality space. The results showed the accuracy of
the proposed SDR which leads to a better visualiza-
tion with minimum false colours compared to the di-
rect projection of DR method, where those results
were confirmed by comparisons of our method with
20 other methods. It has been also demonstrated that
VisualizationofRemoteSensingImagerybySequentialDimensionalityReductiononGraphicsProcessingUnit
77
10
0
10
0.3
10
0.6
10
0.9
10
1.2
10
1.51
10
1.81
10
2.11
10
2.4
0
0.2
0.4
0.6
0.8
1
Amount o f dimensionality reduction (log)
Correlation
Figure 8: The correlation measurement value of SDR is
very high (which is equal to 0.998) when the amount of di-
mensionality reduction is equal to 1. The efficiency of SDR
is reduced when this reduction amount is greater than 1,
and the lowest correlation value is (0.676) when reduction
amount is equal to 223.
the speed of SDR on GPU is much faster than it is on
CPU.
ACKNOWLEDGEMENTS
It would not have been possible to write this paper
without the help and support of the Ministry of Higher
Eduction and Scientific Research in Iraq. The authors
would like to acknowledge the financial and academic
support of the Basrah and Bangor Universities.
REFERENCES
Agrafiotis, D. K., Xu, H., Zhu, F., Bandyopadhyay, D.,
and Liu, P. (2010). Stochastic proximity embedding:
Methods and applications. Molecular Informatics,
29:758–770.
Ameer, P. M. and Jacob, L. (2012). Localization us-
ing stochastic proximity embedding for underwater
acoustic sensor networks. In 2012 National Confer-
ence on Communications (NCC).
AVIRIS (2013). http://aviris.jpl.nasa.gov/index.html.
Bachmann, C. M., Ainsworth, T. L., and Fusina, R. A.
(2005). Exploiting manifold geometry in hyperspec-
tral imagery. IEEE transaction on geoscience and re-
mote sensing, 43:441–454.
Belkin, M. and Niyogi, P. (2002). Laplacian eigenmaps
and spectral techniques for embedding and clustering.
Advances in Neural Information Processing Systems,
14:585591.
Blum, R. S. and Liu, Z. (2006). Multi-sensor Image Fusion
and its Applications. Taylor & Francis Group.
Borg, I. and Groenen, P. J. (1997). Modern Multidimen-
sional Scaling : Theory and Applications. Springer-
Verlag, NewYork.
Bunte, K., Haase, S., Biehl, M., and Villmann, T. (2012).
Stochastic neighbor embedding (sne) for dimension
reduction and visualization using arbitrary diver-
gences. Neurocomputing, 90:23–45.
Darlington, R. B. (1999). Factor analysis. Technical report,
Cornell University,.
Demartines, P. and Hrault, J. (1997). Curvilinear compo-
nent analysis: a self-organizing neural network for
nonlinear mapping of data sets. IEEE Transactions
on Neural Networks, 8:148–154.
Donoho, D. L. and Grimes, C. (2005). Hessian eigenmaps:
New locally linear embedding techniques for high-
dimensional data. In The National Academy of Sci-
ences, 102(21):74267431.
Duda, R. O., Hart, P. E., and Stork, D. G. (2001). Pattern
Classification. Wiley Interscience Inc.
He, X., Cai, D., Yan, S., and Zhang, H.-J. (2005). Neigh-
borhood preserving embedding. In Tenth IEEE Inter-
national Conference on Computer Vision (ICCV) (Vol-
ume:2 ).
Jolliffe, I. (2002). Principal Component Analysis. Springer
Verlag, New York, Inc.
Kaski, S. and Peltonen, J. (2011). Dimensionality reduction
for data visualization. IEEE signal processing maga-
zine, 28:100–104.
Lawrence, J., Arietta, S., Kazhdan, M., Lepage, D., and
OHagan, C. (2011). A user-assisted approach to
visualizing multidimensional images. IEEE Trans-
action on Visualization and Computer Graphics,
17(10):1487–1498.
Lee, J. A., Lendasse, A., and Verleysen, M. (2004). Non-
linear projection with curvilinear distances: Isomap
versus curvilinear distance analysis. Neurocomputing,
57:49–76.
Lespinats, S. and Aupetit, M. (2011). Checkviz: Sanity
check and topological clues for linear and non-linear
mappings. Comput. Graph. Forum, 30:113–125.
Maaten, L. V. D. and Hinton, G. (2008). Visualizing data us-
ing t-sne. Machine Learning Research, 9:2579–2605.
Maaten, L. V. D., Postma, E., and Herik, H. V. D. (2009).
Dimensionality reduction: A comparative review. Ma-
chine Learning Research, 10:1–41.
Mignotte, M. (2012). A bicriteria-optimization-approach-
based dimensionality-reduction model for the color
display of hyperspectral images. IEEE Transactions
on Geoscience and Remote Sensing, 50:501–513.
Mokbel, B., Lueks, W., Gisbrecht, A., and Hammera, B.
(2013). Visualizing the quality of dimensionality re-
duction. Neuocomputing, 112:109–123.
Peltonen, J. (2009). Visualization by linear projections as
information retrieval. Advances in Self-Organizing
Maps Lecture Notes in Computer Scienc, 5629:237–
245.
Roweis, S. T. and Saul, L. K. (2000). Nonlinear dimension-
ality reduction by locally linear embedding. science,
290:2323–2326.
Sanders, J. and Kandrot, E. (2011). CUDA by example.
Addison-Wesley Professional.
IVAPP2014-InternationalConferenceonInformationVisualizationTheoryandApplications
78

Shawe-Taylor, J. and Cristianini, N. (2004). Kernel methods
for pattern analysis. Cambridge University Press.
Shi, J. and Malik, J. (2000). Normalized cuts and image
segmentation. IEEE Transaction on Pattern Analysis
and Machine Intelligence, 22:888–905.
Smith, R. B. (2012). Introduction to Hyperspectral Imag-
ing. MicroImages, Inc.
Steyvers, M. (2002). Multidimensional scaling. Encyclope-
dia of Cognitive Science.
Tenenbaum, J. B., de Silva, V., and Langford, J. C. (2000).
A global geometric framework for nonlinear dimen-
sionality reduction. Science 290, 5500:2319–2323.
Tipping, M. E. and Bishop, C. M. (1999). Mixtures of prob-
abilistic principal component analyzers. Neural Com-
putation, 61:611.
Tyo, J. S., Konsolakis, A., Diersen, D. I., and Olsen, R. C.
(2003). Principal-components-based display strategy
for spectral imagery. IEEE transactions on geoscience
and remote sensing, 41:708718.
Venna, J., Peltonen, J., Nybo, K., Aidos, H., and Kaski, S.
(2010). Information retrieval perspective to nonlin-
ear dimensionality reduction for data visualization. J.
Mach. Learn. Res, 11:451–490.
Weinberger, K. Q. and Saul, L. K. (2006). An introduction
to nonlinear dimensionality reduction by maximum
variance unfolding. In Proceedings of the National
Conference on Artificial Intelligence, Boston, MA.
Zhang, T., Yang, J., Zhao, D., and Ge, X. (2007). Linear
local tangent space alignment and application to face
recognition. Neurocomputing, 70:1547–1553.
Zhang, Z. and Zha, H. (2004). Principal manifolds and
nonlinear dimensionality reduction via local tangent
space alignment. SIAM Journal of Scientific Comput-
ing, 26:313–338.
Zhi, R. and Ruan, Q. (2008). Fractional supervised orthog-
onal local linear projection. In CISP ’08. Congress on
(Volume:2 ) Image and Signal Processing.
VisualizationofRemoteSensingImagerybySequentialDimensionalityReductiononGraphicsProcessingUnit
79
