
New Reconfigurable Middleware for Feasible Adaptive RT-Linux
Imen Khemaissia
1
, Olfa Mosbahi
2
, Mohamed Khalgui
2
and Walid Bouzayen
1
1
Faculty of Sciences, Tunis El-Manar University, Tunis, Tunisia
2
National Institute of Applied Sciences and Technology, INSAT, University of Carthage, Tunis, Tunisia
Keywords:
RT-Linux, Middleware, Reconfiguration, Low-power and Real-time, Agent-based Architecture.
Abstract:
This paper is interested in reconfigurable real-time embedded OS for microprocessors. Our study concerns
specifically RT-Linux. Since the latter is not designed to be reconfigurable, we propose to develop an in-
termediate layer to play the role of middleware that will be in interaction with the kernel Linux. This layer
will manage the addition/removal/update of the periodic and also aperiodic tasks sharing resources and with
precedence constraints. These tasks should respect their deadlines after any reconfiguration scenario. The
proposed middleware will divide the hardware execution into several virtual processors as time slots. The
decomposition is done based on the task’s category. The first virtual processor executes dependent periodic
tasks, the second one executes dependent aperiodic tasks with hard deadlines and the third virtual processor
executes dependent aperiodic tasks with soft deadlines. After applying a reconfiguration scenario, some tasks
may miss their deadlines and the power consumption may increase. In order to re-obtain the feasibility of the
system after a such scenario, an agent-based-architecture is defined to modify the parameters of the tasks. The
different services offered by this middleware are developed. A simulation study is done in order to highlight
the performance of our proposed solutions.
1 INTRODUCTION
Recently, the low-power became a major concern in
embedded real-time operating systems RTOSs since
the new generations of these systems are address-
ing a new criteria such as the low-power consump-
tion. For the low power schedule, many research ac-
tivities suggest the modification of the temporal pa-
rameters of tasks and the dynamic voltage scaling
(DVS) of the processors. For the high performance
of these systems, reducing the power consumption on
the OS level and offering optimal real-time services
are necessary. Many academic research are dedicated
to the low-power reconfigurable RTOS (X. Wang and
Li, 2011) (C. Angelov and Marian, 2005) (M. Khal-
gui and Hanisch, 2011) (Khalgui and Hanisch, 2011)
(K. Thramboulidis and Frantzis, 2004) (George and
Courbin, ). A fair amount of interesting work for the
schedule of tasks that share resources propose many
algorithms and protocols (Liu and Layland, ) (Burns
and Wellings, 2001) (T.P.Baker, 1990). The main
of this study is devoted to minimize the power con-
sumption and to satisfy the real-time constraints of
the RTOS after applying a reconfiguration scenario
where the tasks are with precedence constraints and
share resources. A reconfiguration can be hardware
or software. A software reconfiguration is defined by
the addition/removal/update of the tasks at run-time
but the hardware one means the acivation/deactivation
of a processor. This paper is original since there’s
no work have treated the low-power-reconfiguration
of an embedded RTOS to be composed of peri-
odic and aperiodic tasks under precedence constraints
and sharing resources. This paper aims to recon-
figure dynamically an RTOS by applying dynamic
window-constrained scheduling (DWCS) (West and
Schwan, 1999) (West and Poellabauer, 2000) (P. Bal-
bastre and Crespo, 2002) (Niu, 2011). To our best
knowledge, there is no other published paper utilizing
DWCS to dynamically reconfigure a RTOS with pe-
riodic/aperiodic and real-time OS tasks under prece-
dence and resources constraints. This study presents
an intelligent agent that is a software unit controlling
the evolution in both the system and its environment.
It can dynamically decompose Sys
(i)
into three virtual
processors, VP
1
, VP
2
and VP
3
. These virtual pro-
cessors are utilized to execute the periodic tasks, ape-
riodic tasks with hard deadlines, and aperiodic tasks
with soft deadlines, respectively. All these tasks share
resources and with precedence constraint. A new ap-
158
Khemaissia I., Mosbahi O., Khalgui M. and Bouzayen W..
New Reconfigurable Middleware for Feasible Adaptive RT-Linux.
DOI: 10.5220/0004752901580167
In Proceedings of the 4th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2014), pages
158-167
ISBN: 978-989-758-000-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

proach is developed to locate the different tasks ac-
cording to their types. The tasks of different virtual
processors are with different set-priorities (SP), which
are assigned by labels. The tasks inVP
1
,VP
2
andVP
3
are assigned with labels SP = 1, SP = 2, and SP = 3,
respectively. The label 1 represents the highest SP.
The task with a lower SP can be preempted by the
task with a higher SP, which can be used to switch
the context. After any reconfiguration, some dead-
lines of the periodic/aperiodic tasks may be violated.
The agent modifies the deadlines in order to reach
the systems’s feasibility. This work assumes that Sys
can be reconfigured repeatedly. Before any reconfig-
uration scenario, Sys is feasible with low-power con-
sumption, which is considered as Sys
(0)
. Sys evolves
into Sys
(i)
after the i
t
h reconfiguration. After any re-
configuration, power consumption may increase and
real-time constraints may be violated. A presented
intelligent control agent provides run-time solutions
to reduce the power consumption while satisfying the
real-time constraints dynamically. The solutions con-
sider: Periods or WCETS modification of periodic
tasks, λ
C
modification of aperiodic tasks. Also, the
agent can apply the m, k firm-based degraded recon-
figuration where some deadlines can be allowed to
be violated (Hamdaoui and Ramanathan, 1995) (Ra-
manathan, 1999). The agent also will calculate the
idle periods of VP
1
to locate the aperiodic tasks. To
our best knowledge, no work address the problem of a
reconfigurable RT-Linux to be composed of periodic
and aperiodic tasks sharing data and under real-time
and low-power constraints. The contribution of this
paper will be applied to RT-Linux. The different ser-
vices offered by this middleware are developed. The
rest of the paper is as follows: Section 2 deals with the
state of the art. A background is defined in section 3.
The case study is mentioned in section 4. Section 5
presents the task model and formalize the RT-Linux.
Section 6 describes the agent-based architecture. The
different proposed solutions are described in section
7. The architecture is implemented, simulated and an-
alyzed in section 8. Finally, we summarize our work
by a conclusion.
2 STATE OF THE ART
We summarize in this section the previous researches
dealing with the reconfiguration of real-time em-
bedded systems, the real-time scheduling, the low-
power scheduling, the dynamic window-constrained
scheduling and (m,k) firm model.
2.1 Real-time Embedded
Reconfigurations
Several studies have been dedicated to develop re-
configurable real-time embedded control systems.
We can find two reconfiguration policies in the
available literature: static reconfigurations (C. An-
gelov and Marian, 2005) and dynamic reconfigura-
tions (M. Khalgui and Hanisch, 2011; Khalgui and
Hanisch, 2011). The research in (X. Wang and Li,
2011) focus on low-power dynamic reconfigurations
of synchronous real-time embedded control systems.
The author have proposed an agent-based architec-
ture in order to reduce the power consumption af-
ter applying a reconfiguration scenario. The work
in (K. Thramboulidis and Frantzis, 2004) deals with
real-time unified modeling language (UML)-based
meta-models that will be used between design mod-
els of tasks and their implementation models to sup-
port dynamic user-based reconfigurations of control
systems. The research in (C. Angelov and Marian,
2005) suggests reusable tasks to implement a broad
range of systems where each task is statically recon-
figured without any re-programming. Different solu-
tions for the reconfigurations of WCETs, deadlines,
and periods of the tasks that are scheduled by FP or
EDF are proposed in (George and Courbin, ). To
our best knowledge, no work addresses the problem
of reconfigurable RT-Linux for dependent tasks under
real-time and low-power constraints.
2.2 Real-time Scheduling
There is a lot of successful researches addressing the
problem of scheduling of real-time tasks. The au-
thor in (Liu and Layland, ) suggests the EDF and
RM for the scheduling of periodic tasks. The well-
known EDF is used to schedule the independent tasks.
The original priority ceiling protocol OPCP and im-
mediate priority ceiling protocol IPCP are presented
in (Burns and Wellings, 2001) in order to manage the
tasks that share resources. The author of (T.P.Baker,
1990) propose the stack resource policy SRP that al-
lows processes with different priorities to share a sin-
gle run-time stack. In this paper, we will use the EDF
for the scheduling of periodic tasks. For the depen-
dant tasks, we will order them according to their pri-
orities in order to be independent. Then, we will use
the EDF for the scheduling of periodic tasks and FIFO
for the aperiodic tasks. In order to manage the shar-
ing resources, we will use the IPCP protocol since it
is more efficient. Moreover, this protocol is available
in cheddar (F. Singhoff and Marce, 2004) that will be
used to verify the feasibility of the system after any
NewReconfigurableMiddlewareforFeasibleAdaptiveRT-Linux
159

reconfiguration scenario.
2.3 Dynamic Window-constrained
Scheduling
R. West and K. Schwan are the first to propose the
scheduling DWCS in (West and Schwan, 1999). The
author in (West and Poellabauer, 2000) has proposeda
DWCS-based algorithm which can be utilized to guar-
antee real-time constraints. The work in (P. Balbas-
tre and Crespo, 2002) provide a window constrained-
based method that aims to achieve the upper bound
of the computation time of a task under EDF schedul-
ing. A dynamic approach is proposed in (Niu, 2011)
in order to minimize the power consumption of soft
real-time systems by considering the QoS-guarantee.
To our best knowledge, there is no other published pa-
per that uses DWCS to dynamically reconfigure real-
time aperiodic embedded control systems with asyn-
chronous and periodic real-time OS tasks as the back-
ground tasks. In this work, DWCS is utilized in the
RT-Linux to decompose the tasks within the system
into different virtual processors.
2.4 Low-power Scheduling
In the literature, many algorithms are proposed to ad-
dress the problem of low-power scheduling. Power-
reduction techniques can be restricted into two cat-
egories: static (Shin and Choi, 1999), and dynamic
(Quan and Hu, 2003). The work in (Ishihara, 2010)
proposes an energy-efficient processor that can be
used as an alternative design for the DVS proces-
sors in embedded system design. Based on the con-
cept of the Nash bargaining solution in (George and
Courbin, 2011), a processor’s clock speed and supply
voltage are dynamically adjusted to satisfy the con-
flicting performance metrics. The principles that can
be implemented in periodic/aperiodic task sets con-
sidering battery-aware voltage scheduling algorithms
are proposed in (T. Yokoyama and Takada, 2010).
The work in (George and Courbin, ) concludes the
most achievement solutions for the reconfiguration of
WCETs, deadlines, and periods of tasks scheduled
in FP or EDF. Although all these related studies are
interesting, the current research addresses low-power
reconfigurations of real-time embedded control sys-
tems when dynamic reconfigurations of the periodic
and aperiodic tasks are applied at run-time to save or
improve the performance. This work aims to recon-
figure dynamically real-time embedded control sys-
tems to be composed of dependent periodic/aperioic
tasks sharing resources by applyingdynamic window-
constrained scheduling (DWCS).
2.5 (m,k)-firm Model
The (m,k)-firm model requires at least that m requests
meet their deadline for any k consecutive requests of
the task according to (Hamdaoui and Ramanathan,
1995). In (Ramanathan, 1999), Ramanathan proposes
a scheduling approach that defines mandatory and op-
tional partitions of tasks. Also this scheduling pro-
vides deterministic (m,k)-firm guarantee to each task.
In this work, (m,k)-firm model will be used as a solu-
tion to get a feasible schedule after applying a recon-
figuration scenario.
3 BACKGROUND
The definitions of several important terms used in
the following chapters such as processor demands,
workload demands, and busy periods are listed below
(L. George and Spuri, 1996).
• busy period: A busy period is defined as a time
interval [a,b) such that there is no idle time in
[a,b) (the processor is fully busy) and such that
both a and b are idle times, and
• idle period: An idle time t of a processor is de-
fined as a time where no tasks released before time
t are unfinished at time t. An interval of succes-
sive idle times is classically called an idle period.
The calculation of the processor demand and the
workload demand in time intervals [0,t) and [0,t] are
proposed in (S. Baruah and Rosier, 1990) as follows:
workload demand in [0,t]:
W(t) =
n
∑
i=1
(1 +
j
t
T
j
k
)C
j
Moreover, according to (Baker, 1991), the
processor utilization of periodic and aperiodic tasks
that share resources is given by:
U = (
n
∑
i=k
C
i
D
i
) +
B
k
D
k
,∀k ∈ [1..n] (1)
4 CASE STUDY
The contribution of this paper can be applied for a
large number of RTOS. We choose RT-Linux since it
is an open source. It is a hard real-time RTOS micro-
kernel that runs the entire Linux operating system as a
fully preemptive process. Fig. 1 depicts the design of
the RT-Linux system. Important aspects are displayed
by the figure:
1) RT-Linux sits between the real hardware and
the kernel, 2) it acts as the hardware for the kernel and
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
160
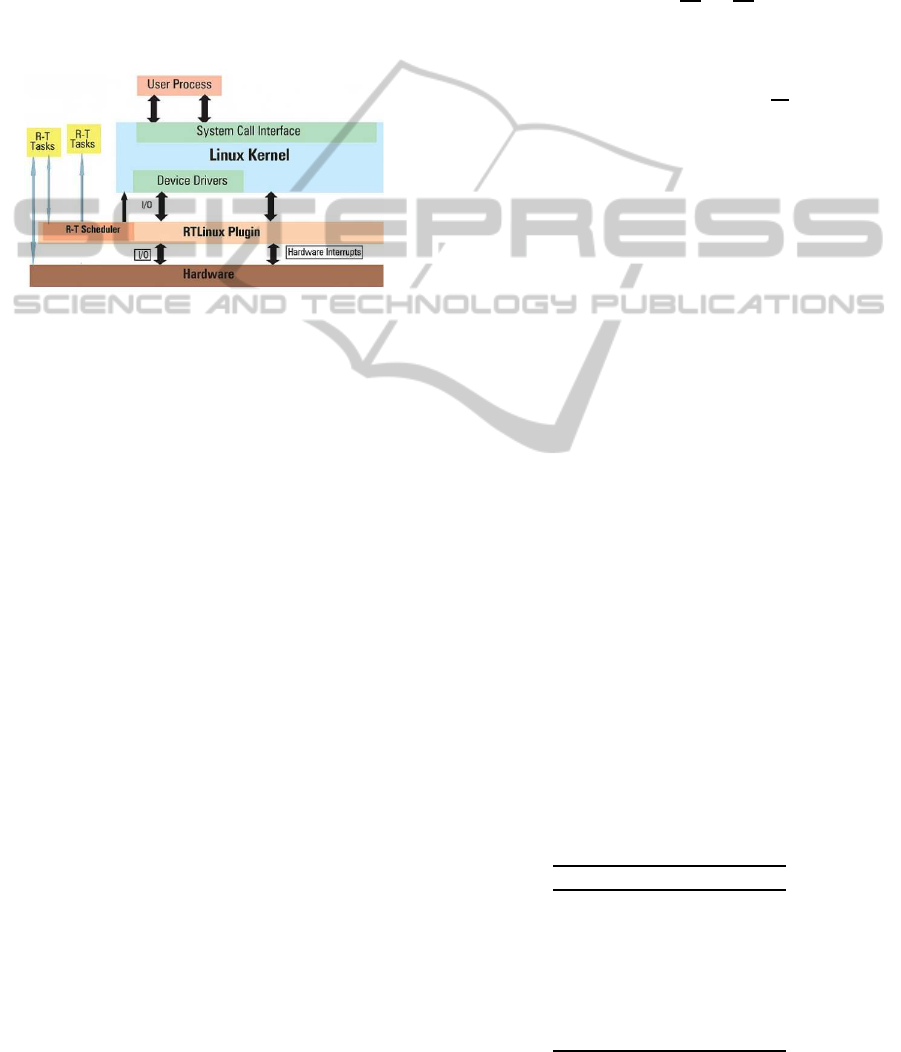
3) it treats the kernel as a single big process. RT-Linux
receives the interruptions of the hardware layer and
sends them to the kernel linux after to convert them
into software interruptions (FSM Labs, 2001). Also,
the RT-LINUX manages the schedule of the real-time
tasks. According to (D. Faggioli and Scordino, ), the
kernel is not designed to be reconfigurable. Thus,
RT-Linux is not reconfigurable. In this research, we
suggest to create a middleware layer between the RT-
Linux and the hardware. The middleware will be in
interaction with the kernel Linux.
Figure 1: RT-LINUX system.
5 MODEL OF TASKS
The RT-Linux is assumed to be composed of a set of
periodic and aperiodic tasks and a set of precedence
relations and resource to be shared by these tasks. The
different sets are as follows:
• Set
per
: Set of the initial periodic tasks.
• Set
pro
: Set of the initial aperiodic tasks.
• Set
precedpre
: Set of precedence constraints be-
tween the periodic tasks
• Set
precedpro
: Set of precedence constraints be-
tween the aperiodic tasks
• List
resource
: List of resources in system sys
Each periodic task τ
i
may produce many jobs (Liu and
Layland, ). It is described by:
• A release time R
i
: It is the time when a job be-
comes available for execution. Since the tasks are
synchronous, R
i
= 0.
• A period T
i
: is the regular inter−arrival time.
• A deadline D
i
: The absolute deadline is equal to
the release time plus the relative deadline.
• A WCET C
i
: It is the time needed to compute a
job.
• A static priority S
i
: The highest static priority is
equal to 1, i.e., S
i
= 1 represents τ
i
with the high-
est static priority.
Note that we consider that T
i
=D
i
. For the aperiodic
tasks, we can characterize them by a deadline d
i
, a
release time r
i
and a WCET c
i
. Each aperiodic set
tasks arrives with two rates λ
C
and λ
r
(I.Khemaissia,
2012). Since T
i
=D
i
, the processor utilization U
per
of
Set
per
is given by:
U
per
= (
n
∑
k=1
C
k
T
k
) +
B
k
T
k
(2)
According to (I.Khemaissia, 2012), the processor uti-
lization U
pro
is formalized by U
pro
=
λ
r
λ
C
The initial
processor utilization is the sum of U
per
and U
pro
as
given by the following equation:
U
bef
= U
per
+U
pro
(3)
We assume that the system is scheduled by the well
known EDF algorithm. For the tasks with precedence
constraints, we turn them into independent ones
according to (H. Chetto, 1989). To manage the
precedence constraints, we assign firstly a priority
Pr
i
for each task. The priority of the tasks that have a
precedence constraint are assigned as follows:
• Pr
i
< Pr
j
The deadline D
i
is equal to:
D
i
= minD
i
,(D
j
−C
j
),andD
j
= D
j
(4)
Where τ
i
and τ
j
are dependant and τ
i
is before τ
j
.
By Eq. (4), we guarantee that the precedence con-
straint will not be violated.
For the tasks that share resources, we have used
the immediate priority ceiling protocol IPCP (Burns
and Wellings, 2001).
Table 1: Initial tasks.
task R C D/d T
τ
1
0 1 10 40
τ
2
0 1 8 15
τ
3
0 4 20 30
τ
4
0 8 30 40
τ
h1
0 2 26
τ
h2
0 1 30
τ
s1
0 1 40
NewReconfigurableMiddlewareforFeasibleAdaptiveRT-Linux
161
The reconfigurable RT-Linux is illustrated through a run-
ning example shown by the table 1. It contains four
synchronous tasks and an aperiodic task set consisting
of three tasks, τ
h1
, τ
h2
, and τ
s1
, with the distributions
λ
C
= 0.5 and λ
r
= 0.2. We consider Pr(τ
1
) < Pr(τ
2
),
Pr(τ
4
) < Pr(τ
3
) and Pr(τ
h1
) < Pr(τ
h2
< Pr(τ
s1
). To
manage the dependent tasks, the deadlines of the periodic
tasks are calculated as follows:
• D
1
= min(40,15− 1) = 14
• D
2
= 15
• D
3
= 30
• D
4
= min(40,30− 4) = 26
The new deadlines of the aperiodic tasks are:
• D
h1
= min(26,30− 1) = 26
• D
h2
= min(30,40− 1) = 30
• D
s1
= 40
All the tasks share a unique resource X. The blocking
factor B is assumed to be equal to 1. By applying Eq. (2),
the processor utilization of periodic tasks U
per
is equal
to 0.574. The processor utilization of aperiodic tasks is
equal to 0.4. Thus, the total processor utilization is equal
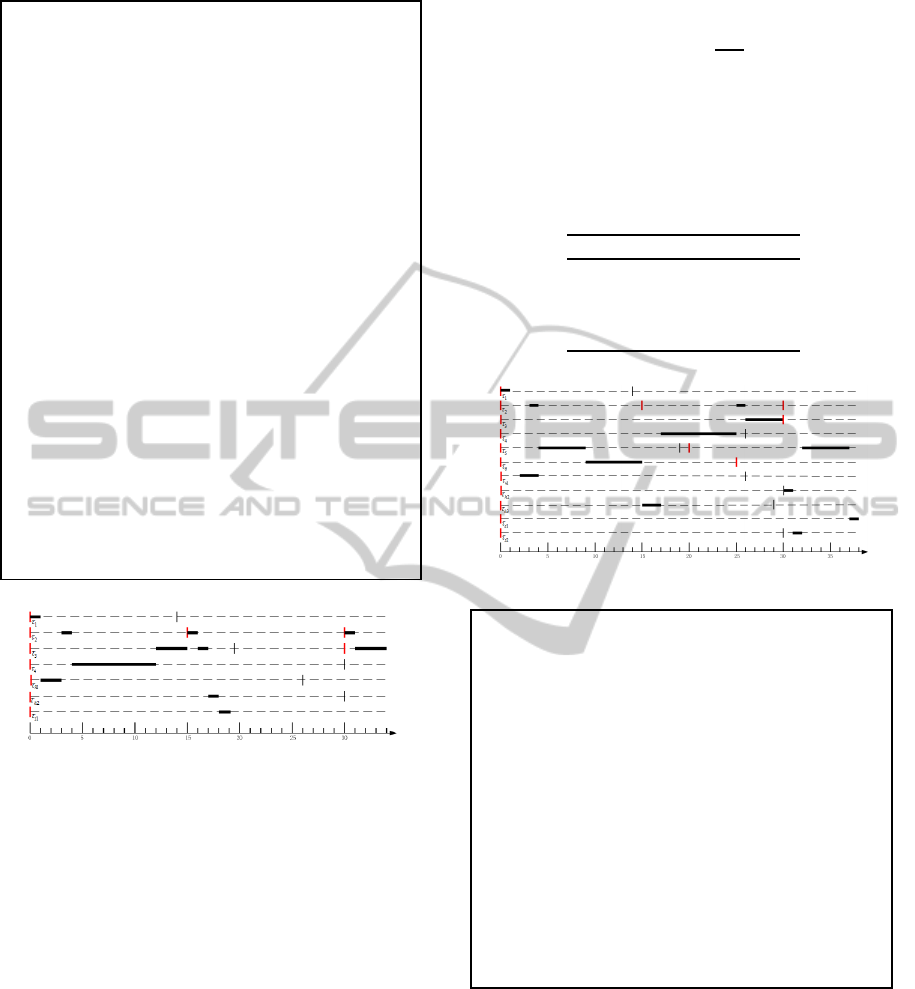
to 0.974. By applying Cheddar (F. Singhoff and Marce,
2004), Fig. 5 presents the low-power scheduling result of
Sys. The system is feasible and the real-time constraints
are respected
Figure 2: Scheduling of the initial system.
The energy is proportional to the processor utiliza-
tion according to (X. Wang and Li, 2011).
P
i
∝ U
i
(5)
A reconfiguration scenario is the addi-
tion/removal/update of periodic and aperiodic
tasks. If, we add a dependant task, we should add a
precedence relation. If we delete a task, we should
delete the correspondent precedence relation.
The initial configuration is denoted as Sys
(0)
. Sys
evolves into Sys
(i)
after the i
th
reconfiguration sce-
nario at run-time by adding/removing/updating some
periodic/aperiodic tasks. The new processor utiliza-
tions after the reconfiguration scenario U
(ia)
per
and U
(ia)
pro
are given as follows:
U
(ia)
per
=
n
(i)
∑
j=1
U
j
per
(6)
and
U
(ia)
pro
=
i
∑
j=0
λ
rj
λ
Cj
(7)
The total processor utilization after the reconfigura-
tion scenario is equal to:
U
(ia)
= U
(ia)
per
+U
(ia)
pro
(8)
Table 2: Added tasks.
task R C D/d T
τ
5
0 5 18 20
τ
6
0 6 20 25
τ
h3
0 2 25
τ
s2
0 1 30
Figure 3: Scheduling of the system after tasks addition.
Table 2 indicates two periodic tasks and two aperiodic
tasks satisfying λ
C1
= 0.4 and λ
r1
= 0.1. τ
6
must be after
tau
5
. After their addition to Sys, U
per
and U
ape
increase
to be = 1.154 and 0.65. The deadlines of the added peri-
odic tasks are as follow:
• D
5
= min(20,25− 6) = 19
• D
6
= 25
The deadlines of the added periodic tasks are as follow:
• D
h3
= min(25,30− 1) = 29
• D
s2
= 30
Then, the new processor utilization of Sys
(1)
is equal to
1.431. Moreover, some tasks don’t meet their deadlines
for example τ
h2
completes its execution at 31 and its
deadline is equal to 30. Then, it is obvious that the sys-
tem is infeasible and the task set is not schedulable. The
scheduling result at the full speed is shown in Fig. 3.
6 DYNAMIC WINDOW-
CONSTRAINED-BASED
ARCHITECTURE LOW POWER
In order to re-obtain the feasibility of the system after
any reconfiguration scenario, an agent based architec-
ture is defined to propose new technique solutions.
By utilizing DWCS after applying a reconfigura-
tion scenario, three virtual processors are provided
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
162
dynamically to reconfigure Sys
(i)
in order to re-obtain
a feasible system with low-power. First of all, this
agent will create the virtual processors. Then, mod-
ify the parameters of tasks. After that it calculates the
busy periods of VP
1
. The latter will be used to calcu-
late the idle periods to locate the aperiodic tasks.
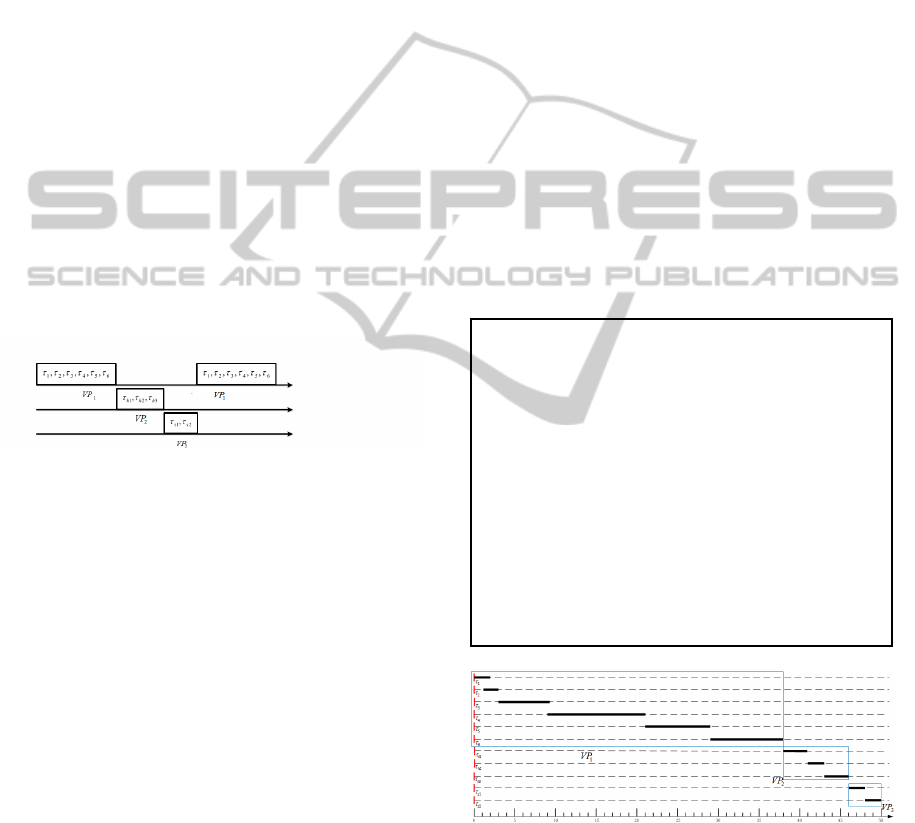
6.1 Virtual Processors
The agent decomposes the execution of the hardware
processor into into three virtual processors VP
1
, VP
2
,
VP
3
. Each virtual processor executes a category of
tasks as follows:
• VP
1
: executes the dependent periodic tasks
• VP
2
: executes the dependent aperiodic tasks that
share resources.
• VP
3
: executes the dependent aperiodic tasks with
hard deadlines.
Where:
VP
1
is with the highest priority and VP
3
is with the
lowest priority. The different virtual processors are
shown in Fig. 4
Figure 4: The virtual processors.
6.2 Busy Period and Idle Period
Calculation
In this section, we will develop an approach in order
to execute the different tasks. We start by calculating,
the busy periods of VP
1
.
According to (L. George and Spuri, 1996), the
processor busy period of Set
(i)
syn
can be calculated by
the workload demand in a time interval [0,t) itera-
tively due to the following equation:
L
(0)
=
n
(i)
∑
j=1
C
(i)
j
L
(m+1)
= W(L
(m)
)
(9)
The last equation will give us all the busy periods of
VP
1
. Before the calculation of the busy periods, we
should calculate the C
(i)
j
at a lower speed (Quan and
Hu, 2003). Thus, the C
(i)
j
are equal to the ratio of C
j
and the processor speed that it is fixed to be equal to
0.7.
L
start
k
(VP
1
)= 0 since the tasks are synchronous.
L
end
k
(VP
1
) is calculated by Eq. (9). It is equal to 38.
L
start
k
(VP
2
)= L
end
k
(VP
1
) L
end
k
(VP
2
) is calculated by:
L
(0)
= L
end
k
(VP
1
) +
k
(i)
∑
j=n
C
(i)
k
L
(m+1)
= W(L
(m)
)
(10)
In the idle periods of VP
1
, the execution of the
other category of tasks is done. They are calculated
as follows:
• IL
start
k
(VP
2
) = L
end
k
(VP
1
)
• IL
end
k
(VP
2
) is equal to the sum of the WCETs of
the tasks that included into VP
2
plus L
end
k
(VP
1
)
• IL
start
k
(VP
3
)= IL
end
k
(VP
2
) .
• IL
end
k
(VP
3
) is equal to the sum of the WCETs of
the tasks that included into VP
2
plus IL
end
k
(VP
2
).
For the aperiodic tasks, if the current idle period
is not sufficient to support a WCET of task, it must be
executed in the next idle period of the relative virtual
processor.
After modifying the periods, we calculate the busy peri-
ods of VP
1
.
• L
start
k
(VP
1
)=0
• L
end
k
(VP
1
)=38
After that, we calculate the idle periods of VP
1
to locate
the aperiodic tasks.
• IL
start
k
(VP
2
)= 38
• IL
end
k
(VP
2
)=46
• IL
start
k
(VP
3
)=46
• IL
end
k
(VP
3
)=50
The different virtual processors and busy/idle periods are
illustrated via Fig. 5
Figure 5: Virtual processors after the reconfiguration.
6.3 Schedule verification
After each reconfiguration scenario, the agent verifies
the system’s feasibility. If U
(i)
≤ 1, the agent must
propose different technique solutions:
• Period modification or WCETS modification
NewReconfigurableMiddlewareforFeasibleAdaptiveRT-Linux
163
• The modification of the rate λ
C
, and
• Degraded reconfiguration by using (m,k)− firm
6.4 Power Consumption Evaluation
The power consumption is evaluated in every virtual
processor. According to (X. Wang and Li, 2011), the
power consumption is proportional to the processor
utilization. If the processor utilization is minimized,
then the power consumption is minimized automati-
cally. The power decrease of each virtual processor is
calculated as follows:
P
Di
= P
i
aft
− P
i
bef
(11)
where :
• i: is the i
t
h reconfiguration
• P
i
aft
: Power consumption after the reconfiguration
• P
i
bef
: Power consumption before the reconfigura-
tion
7 PROPOSED SOLUTIONS
In this section, we present the different suggested so-
lutions.
7.1 Parameters Modification
In this work, we propose the modification of the peri-
ods or the WCETS of periodic tasks and the rate λ
C
of
the aperiodic tasks. For the periodic tasks, if we mod-
ify the periods or the WCETs, we obtain a feasible
system with low-power in both cases.
7.1.1 Period Modification of Periodic Tasks
Proposition 1. The extended period T
(i)
j
of a periodic
task τ
j
is equal to T
(i)
j
=
&
(
∑
j=1
(
(C
j
+B
j
)
U
per
)
'
.
Proof. In order to minimize the processor utilization:
U
(i)
per
=
∑
j=1
C
j
+B
T
(i)
j
≥ U
per
Then,
T
(i)
j
= (
∑
j=1
(
(C
j
+B
j
)
U
per
). Since the periods are integer,
T
(i)
j
=
&
(
∑
j=1
(
(C
j
+ B
j
)
U
per
)
'
(12)
After the modification of the periods, the new pro-
cessor utilization of periodic tasks is given by:
U
(i)
perT
= (
n
∑
k=1
C
k
T
(i)
k
) +
B
k
T
(i)
k
(13)
Then, we can formulate the new power consumption
of the periodic tasks as follows:
P
(i)
perT
= (U
(i)
per
)
2
(14)
The new periods are equal to 54 according to Eq. (12).
By applying Eq. (13), U
perT
is equal to 0.574. It is ob-
vious that the processor utilization is unchangeable after
applying a reconfiguration scenario.
7.1.2 WCETs Modification
Proposition 2. The extended WCETC
(i)
j
of a periodic
task is C
(i)
j
=
⌊
U
per
−
∑
j=1
B
j
T
j
∑
j=1
1
T
j
⌋
1,if
U
per
−
∑
j=1
B
j
T
j
∑
j=1
1
T
j
≤ 0
Proof. We followed the same used technique to cal-
culate the new WCETs. After we reconfigure the
WCETS, we should get U
(i)
per
< U
per
. Thus
U
(i)
per
=
∑
C
(i)
j
+B
T
j
≥ U
per
So, the new C
(i)
j
are given by:
C
(i)
j
=
⌊
U
per
−
∑
j=1
B
j
T
j
∑
j=1
1
T
j
⌋
1,if
U
per
−
∑
j=1
B
j
T
j
∑
j=1
1
T
j
≤ 0
(15)
After the modification of the WCETs, the new
processor utilization of periodic tasks is given by:
U
(i)
perC
= (
n
∑
k=1
C
(i)
k
T
k
+
B
k
T
k
(16)
Then, we can formulate the new power consumption
of the periodic tasks as follows:
P
(i)
C
= (U
(i)
perC
)
2
(17)
All the new WCETS are equal to 2 after applying Eq.
(15). According to Eq.(16), the new processor utilization
is equal to 0.72. We can conclude that the second solution
is more beneficial than the first one since the processor
utilization is minimized in a very remarkable way.
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
164
7.1.3 λ
C
Modification
As similar as in the work (I.Khemaissia, 2012), the
rate λ
Cj
of the aperiodic tasks is modified to be:
λ
(i)
Cj
= λ
Cj
×
U
(ia)
U
bef
, ∀ j ∈ [0,i] (18)
For the rate λ
Cj
of the aperiodic tasks that share re-
sources is calculated also according to Eq. (18) since
all the aperiodic tasks arrive with the same rate λ
Cj
.
The new rates λ
C
are equal to 0.744 and 0.595 respec-
tively. The new processor utilization of aperiodic task
U
(1)
pro
is equal to U
pro
.
After the modification of the parameters of peri-
odic and aperiodic tasks, we will present the new re-
sults in Table 3
The reconfiguration result of Sys
(1)
is shown in Table 3.
The system is feasible with low-power according to Fig.
5
Table 3: Reconfiguration Result.
task C
(1)
D
(1)
/d
(1)
T
(1)
τ
1
2 54 54
τ
2
2 54 54
τ
3
2 54 54
τ
4
2 54 54
τ
5
2 54 54
τ
6
2 54 54
τ
h1
2 46
τ
h2
1 49
τ
h3
2 26
τ
s1
1 40
τ
s2
1 30
7.1.4 (m, k)− firm
As a third solution, the agent applies the (m,k)−
firm model. We assume if we have m instance
of each periodic task that respect their real-time
constraints between k ones, then we can consider
that this system is feasible in a degraded mode.
We can assume that every periodic task has (2, 3)-firm
guarantee. The agent must verify if all the tasks respect
this constraint or not. For example, the first and the sec-
ond instance of T
1
meet their deadlines. Then, T
1
respects
the (2, 3)-firm guarantee. This verification must be done
for all the periodic tasks.
8 EXPERIMENTS
This section presents an experimentation study by ap-
plying the theoretical contributions of the current pa-
per for the middleware for RT-Linux. We present first
of all the implementation of the agent-based architec-
ture before showing the simulations and analysis that
are used to evaluate the benefits of our contribution.
8.1 Implementation
The proposed middleware can be utilized to theoreti-
cally reconfigure its OS. A tool is developed, which
is utilized to minimize the power consumption and
satisfy the real-time constraints. Many routines are
added to RT-Linux in order to apply the different pro-
posed solutions. A routine is a service offered by RT-
Linux.
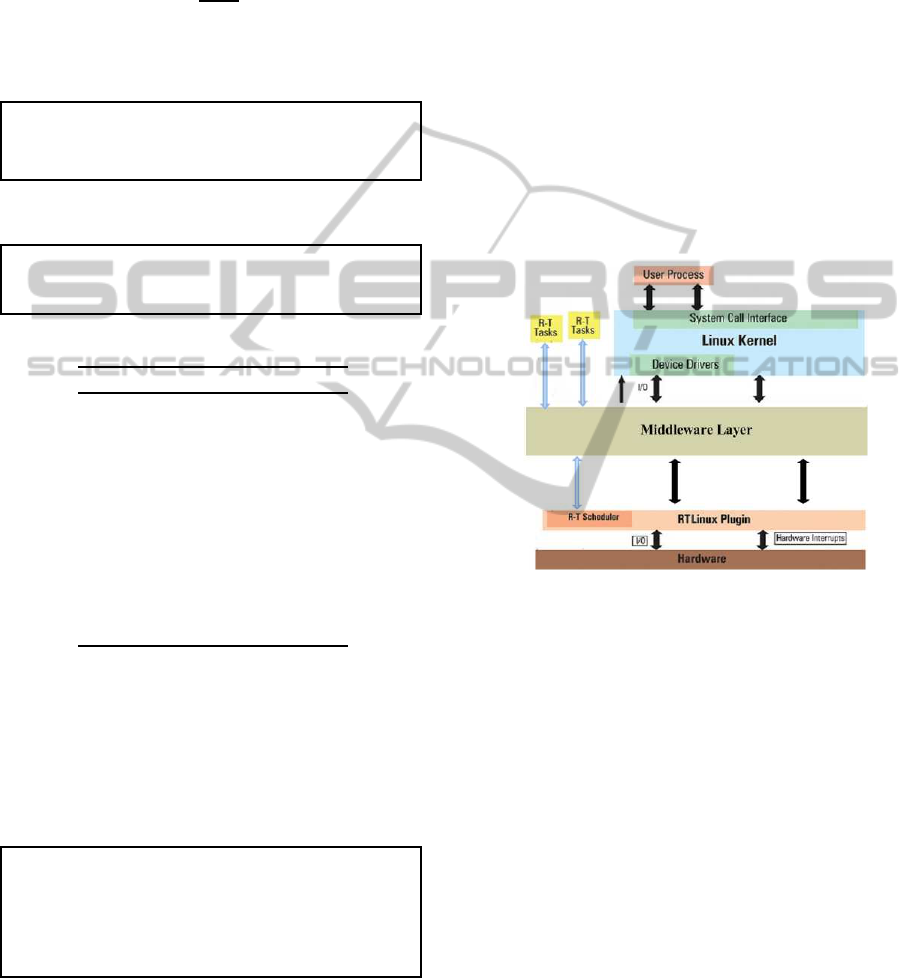
The middleware will be on interaction with the
kernel. Fig. 6 represents the middleware layer lo-
cation.
Figure 6: The middleware layer location.
Algorithm 1 is developed in order to reconfigure
the RT-Linux. It is with complexity O(n
2
) Initially,
the agent reads the parameters of the initial tasks. It
calculates the processor utilization of the initial sys-
tem. It reads thereafter the parameters of the added
tasks. It assigns the tasks to the different virtual
processors according to their categories. Moreover,
it manages the shared resources and the precedence
constraint. Then, it invokes the developed solutions
to minimize the power consumption. At the end, it
evaluates the power consumption.
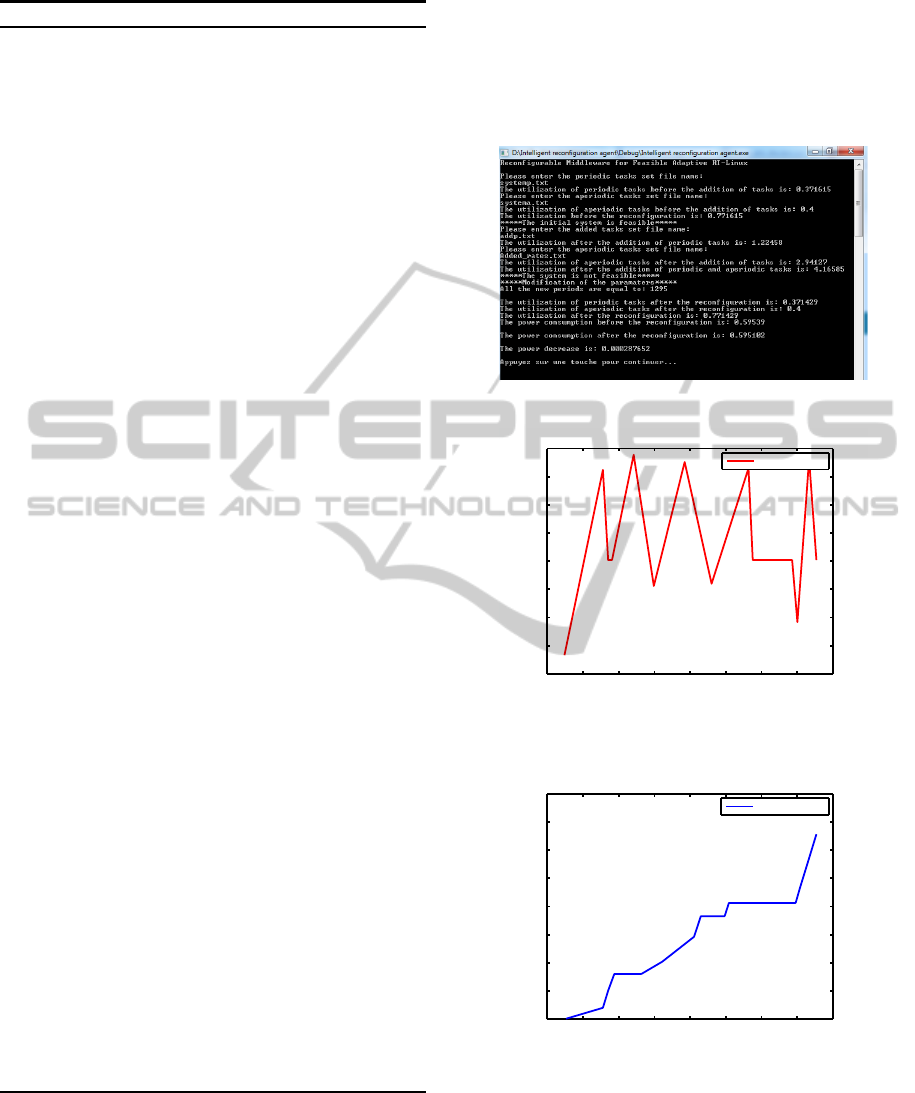
8.2 Simulations and Analysis
The developed tool presents the different possible so-
lutions given by the proposed intelligent agent. Fig. 7
shows a developed software for algorithm 1. We have
assumed 50 initial periodic tasks and several aperi-
odic task sets. All the tasks are with precedence con-
straint and share resources. The initial system is fea-
sible with low-power. Every time, we add some peri-
odic tasks and an aperiodic task sets. The Simulation
NewReconfigurableMiddlewareforFeasibleAdaptiveRT-Linux
165
Algorithm 1: Reconfiguration of the RT-LINUX.
1. Input: the periodic and the aperiodic tasks;
2. Compute U
per
, U
pro
;// Eq. (2 and Eq. (5)
3. Calculate U
bef
;// Eq. (3 3. Assign S
per
and S
pro
at U
bef
;
4. Add new tasks?
N:
END;
Y:
5.
if category==periodic then
Assign task to VP
1
;
else
if category==aperiodicwith hard deadline then
Assign task to VP
2
;
else
Assign task to VP
3
;
end if
end if
6.
if (U
ia
≥ 1) or (U
ia
≥ U
bef
) then
for each periodic task do
if Solution== ’Period modification’ then
Modify the periods;//Eq. (12)
Calculate the new processor utilization of
periodic tasks;//Eq. (13)
else
Modify the WCETs;//Eq. (15)
Calculate the new processor utilization of
periodic tasks;//Eq. (16)
end if
end for
for each aperiodic task do
Modify the rate λ
C
of the tasks that share re-
sources;//Eq. (18)
Calculate the new processor utilization of ape-
riodic tasks;//Eq. (7)
end for
end if
7. Calculate the total new processor utilization
8. Calculate all the busy periods of the synchronous
tasks;
9. Calculate the the idle periods of the tasks of VP
2
,
VP
3
.
10. Calculate the new power consumption
11. Evaluate the power consumption// Eq. (11)
12. Back to Step 4;
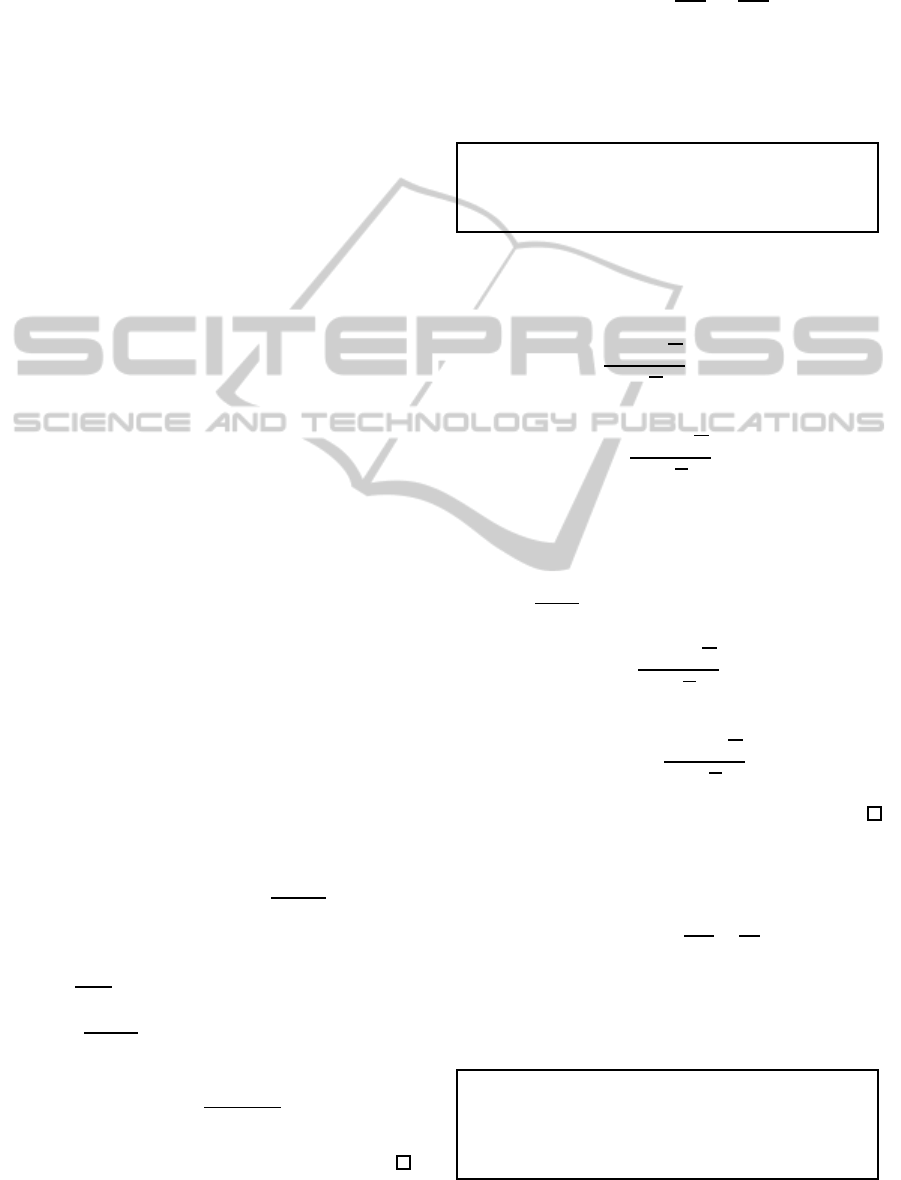
results are shown on Fig. 8 and Fig. 9. Fig 8 repre-
sents the power consumption after modifying the pe-
riods. It is between [0.5949, 05953]. The variation
can be not considered. We can conclude that after ap-
plying the period modification, the power consump-
tion is minimized. For Fig. 9, it represents the power
consumption after the WCETS reconfiguration. The
curve showsa remarkable variations. In a nutshell, we
can conclude that by using this tool, the power con-
sumption after applying any reconfiguration scenario
is minimized or maintained.
Figure 7: Tool.
1 1.5 2 2.5 3 3.5 4 4.5 5
0.5949
0.5949
0.595
0.595
0.5951
0.5951
0.5952
0.5952
0.5953
U
(ia)
P
(i)
Modification of T
(i)
Figure 8: Power consumption decrease by modifying peri-
ods.
1 1.5 2 2.5 3 3.5 4 4.5 5
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
U
(ia)
P
(i)
Modification of C
(i)
Figure 9: Power consumption decrease by modifying
WCETs.
9 CONCLUSIONS
This paper focuses on reconfigurable real-time em-
bedded OS for microprocessors to be implemented
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
166

by sets of periodic/aperiodic tasks sharing resources
and with precedence constraints. It is assumed that
the system under consideration can be reconfigured
repeatedly. In order to offer low-power consumption
before and after the application of any reconfiguration
scenario, a DWCS architecture is defined. An intelli-
gent software control agent is proposed accordingly
to evaluate the power consumption and reconfigure
the system. First of all the agent manages the prece-
dence constraints. Then, it creates the different virtual
processors. After that, it modifies the parameters of
periodic/aperiodic tasks. And finally it evaluates the
power consumption.
To our best knowledge, no work dealing with a
middleware is found to dynamically reconfigure RT-
Linux.
REFERENCES
Baker, T. (1991). Stack-based scheduling of realtime pro-
cesses. Journal of Real-Time Systems.
Burns, A. and Wellings, A. (2001). Scheduling algorithms
for multiprogramming in a hard real time environ-
ment. In Addison Wesley Longmain.
C. Angelov, K. S. and Marian, N. (2005). Design models
for reusable and reconfigurable state machines. Proc.
of Embedded Ubiquitous Comput.
D. Faggioli, F. Checconi, M. T. and Scordino, C. An edf
scheduling class for the linux kernel. Germany. Proc.
of the 11th Real-Time Linux Workshop.
F. Singhoff, J. Legrand, L. N. and Marce, L. (2004). Ched-
dar: A flexible real time scheduling framework. As-
soc. Comput. Mach.
FSM Labs, I. (2001). Getting-started-with-rtlinux.
George, L. and Courbin, P. Reconfiguration of unipro-
cessor sporadic real-time systems: the sensitivity ap-
proach. In chapter in IGI-Global Knowledge on Re-
configurable Embedded.
George, L. and Courbin, P. (2011). Reconfiguration of
uniprocessor sporadic real-time systems: the sensitiv-
ity approach. IGI-Global Knowledge on Reconfig-
urable Embedded Control Systems: Applications for
Flexibility and Agility.
H. Chetto, M. C. (1989). Some Results of the Earliest Dead-
line Scheduling Algorithm. IEEE Tr. on Software En-
gineering.
Hamdaoui, M. and Ramanathan, P. (1995). A dynamic pri-
ority assignment technique for streams with (m,k)firm
deadlines. IEEE Transactions on Computers.
I.Khemaissia (2012). master’sthesis: “Low-power recon-
figurations of real-time embedded systems. Tunisia.
Ishihara, T. (2010). A multi-performance processor for re-
ducing the energy consumption of real-time embed-
ded systems. IEICE Trans. on Fundamentals of Elec-
tronics, Communications and Computer Sciences.
K. Thramboulidis, G. D. and Frantzis, A. (2004). Towards
an implementation model for fb-based reconfigurable
distributed control applications. Vienna. Proc. IEEE
7th Int. Symp. Object-Oriented Real-Time Dist. Com-
put.
Khalgui, M. and Hanisch, H.-M. (2011). Reconfigura-
tion protocol for multi-agent control software archi-
tectures. IEEE Trans. Syst. Man Cybern. Part C Appl.
Rev.
L. George, N. R. and Spuri, M. (1996). Preemptive
and non-preemptive scheduling real-time uniproces-
sor scheduling. INRIA Research Report.
Liu, C. L. and Layland, J. W. Scheduling algorithms for
multiprogramming in a hard real time environment. In
J. Assoc. Comput. Mach.
M. Khalgui, O. Mosbahi, Z. W. L. and Hanisch, H.-M.
(2011). Reconfiguration of distributed embedded-
control systems. IEEE/ASME Trans. Mechatronics.
Niu, L. W. (2011). Energy efficient scheduling for real-time
embedded systems with qos guarantee. Real-Time
Syst.
P. Balbastre, I. R. and Crespo, A. (2002). Schedulability
analysis of window-constrained execution time tasks
for real-time control. Proc. 14th Euromicro Conf.
Real-Time Syst.
Quan, D. and Hu, X. S. (2003). Minimal energy fixed-
priority scheduling for variable voltage processors.
IEEE Trans. Comput.-Aid. Des. Integ. Circu. Syst.
Ramanathan, P. (1999). Overload management in real-time
control applications using (m,k)-firm guarantee. IEEE
Trans:arallel and Distributed Systems.
S. Baruah, R. H. and Rosier, L. (1990). Algorithms and
complexity concerning the preemptive scheduling of
periodic real-time tasks on one processor. Real-Time
Syst.
Shin, Y. and Choi, K. (1999). Power conscious fixed priority
scheduling for hard real-time systems. New Orleans.
Proc. IEEE Des. Autom. Conf.
T. Yokoyama, G. Zeng, H. T. and Takada, H. (2010). Static
task scheduling algorithms based on greedy heuristics
for battery-powered dvs systems. IEICE Trans. In-
form. Syst.
T.P.Baker (1990). A stack-based resource allocation policy
for realtime processes. In Real-Time Systems Sympo-
sium.
West, R. and Poellabauer, C. (2000). Analysis of a window-
constrained scheduler for real-time and best-effort
packet streams. Proc. 21st IEEE Real-Time Syst.
Symp.
West, R. and Schwan, K. (1999). Dynamic window-
constrained scheduling for multimedia applications.
IEEE, 6th Intern. Conf. Mult. Comp. and Systems.
X. Wang, M. K. and Li, Z. W. (2011). Dynamic low power
reconfigurations of real-time embedded systems. In
in: Proc. 1st Pervas. Embedded Comput. Commu.
Syst, Portugal.
NewReconfigurableMiddlewareforFeasibleAdaptiveRT-Linux
167
