
Synthesis and Abstraction of Constraint Models for Hierarchical
Resource Allocation Problems
Alexander Schiendorfer, Jan-Philipp Stegh
¨
ofer and Wolfgang Reif
Institute of Software & Systems Engineering, Augsburg University, Augsburg, Germany
Keywords:
Hierarchical Resource Allocation, Constraint Satisfaction Problems, Model Abstraction, Autonomous Power
Management.
Abstract:
Many resource allocation problems are hard to solve even with state-of-the-art constraint optimisation software
upon reaching a certain scale. Our approach to deal with this increasing complexity is to employ a hierarchical
“regio-central” mechanism. It requires two techniques: (1) the synthesis of several models of agents providing
a certain resource into a centrally and efficiently solvable optimisation problem and (2) the creation of an
abstracted version of this centralised model that reduces its complexity when passing it on to higher layers. We
present algorithms to create such synthesised and abstracted models in a fully automated way and demonstrate
empirically that the obtained solutions are comparable to central solutions but scale better in an example taken
from energy management.
1 INTRODUCTION
Resource allocation problems present themselves in a
variety of domains (Chevaleyre et al., 2006), includ-
ing autonomous power management (Anders et al.,
2013b) or grid computing (Abouelela and El-Darieby,
2012). Constraint programming provides a wide
range of algorithms and techniques targeted at solv-
ing and optimising problems including resource al-
location that are readily available in state-of-the-art
software. By virtue of this general formalism for stat-
ing problems declaratively in terms of variables, do-
mains, and constraints, many different problem in-
stances can be tackled with these algorithms. This
proves particularly useful when the characteristics of
heterogeneous agents need to be modelled. If, how-
ever, the size of the system prohibits a centralised so-
lution, due either to the communication overhead re-
quired in collecting all necessary information or due
to the complexity of a centralised solution model, hi-
erarchical decomposition provides a generic approach
to deal with these issues (see, e.g., Abouelela and
El-Darieby, 2012; Boudjadar et al., 2013). In such
cases, distributed, cooperative, agent-based systems
can be employed in which the agents form organisa-
tions. The global problem is hierarchically decom-
posed and the organisations collaboratively and recur-
sively solve a sub-problem. The overall solution is the
combination of the sub-solutions. It is not necessarily
globally optimal, since each organisation works with
regional knowledge only, but the scalability benefits
often outweigh this drawback.
Decisions in such problems depend on the capa-
bilities of the individual components on the lowest
level. To make correct decisions further up in the
hierarchy, this information must at least be partially
propagated to these higher levels. Since hierarchical
solving is employed in cases where the scale of the
system prohibits a fully centralised solution, informa-
tion must be abstracted when propagated upwards or
the scalability benefit will be lost. At the same time,
the information provided by the distinct agents on the
lower hierarchy levels must be synthesised to gain a
solvable model.
While fully decentralised approaches (Yokoo
et al., 1998) deal with the scalability problem as well,
they work with even more limitations on the infor-
mation available and introduce communication over-
head. The hierarchical or regio-central approach cen-
tralises information from a region of the system and
solves this sub-problem centrally. Depending on the
hierarchical structure of the system, many such re-
gions can exist and they all solve the sub-problems
concurrently as shown with examples in Section 3.
Resource allocation problems and their hierarchi-
cal specialisation can be expressed as constraint satis-
faction and optimization problems (also referred to as
constraint models) to make use of highly optimised
15
Schiendorfer A., Steghöfer J. and Reif W..
Synthesis and Abstraction of Constraint Models for Hierarchical Resource Allocation Problems.
DOI: 10.5220/0004757700150027
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 15-27
ISBN: 978-989-758-016-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

general purpose constraint solvers (see, e.g., Hladik
et al., 2008; Santos et al., 2002). Our synthesis and
abstraction approach assumes that the models of con-
crete producer agents are available as constraint mod-
els. This paper introduces two techniques for using
constraint models in a hierarchical setting:
Synthesis: the models provided on a lower level
are combined and augmented with organisation-
specific constraints to form an optimization prob-
lem that can be solved in a regio-central way. The
solution of this model is distributed to the agents
on the lower level.
Abstraction: the information contained in the mod-
els of one region is abstracted to form a new
model of the hierarchy level which is then pro-
vided to the next higher level. In this way, higher
levels are not overwhelmed with the details of the
lower levels but can still provide solutions that
can actually be achieved by the lower levels. Our
understanding of abstraction follows Giunchiglia
and Walsh (1992): “Abstraction is the mapping of
a problem representation into a simpler one that
satisfies some desirable properties in order to re-
duce the complexity of reasoning.”
There are several reasons to pursue this approach:
First, constraint languages offer flexibility suitable
for organisations of heterogeneous agents and prob-
lems and can be solved with established algorithms.
Second, a large problem instance is broken into
smaller subproblems (fewer decision variables and
constraints) which tend to be easier to solve to offer
scalability. And lastly, individual agent models can
be crafted without taking others into account and sev-
eral agent models are automatically combined to be
solved regio-centrally which allows for fast recom-
bination and reduces communication overhead com-
pared to a fully distributed solution.
We will detail the lifecycle and algorithms for
this regio-central solution approach with a case study
from autonomous power management. The goal is
to find “schedules” for controllable power plants, i.e.,
instructions of how much power they have to produce
at which point in time, based on the predicted demand
and the predicted input of weather-dependent power
plants at that time. The details of this case study will
be explained in Section 3.
Related Work. The term “model abstraction” was
coined by the simulation engineering community and
Frantz (1995) provides a taxonomy of common model
abstraction techniques, some of which are found in
our approach as well such as piecewise linear func-
tions to approximate general functions. As an ex-
ample of work in this area, Lee and Fishwick (1996)
used neural networks to get a behavioural abstraction
of subcomponents that were given as state machines.
Their goal was to run simulations on different lev-
els independently of lower levels — which is simi-
lar to solving constraint problems based on abstrac-
tions. Pelikan and Goldberg (2000) found hierarchi-
cal decomposition to be useful in genetic algorithms
by combining solutions from lower levels to solu-
tions on higher levels similar to the presented method.
While they also made a case for hierarchical problem
solving in general, they put emphasis on how to im-
prove existing genetic and evolutionary algorithms.
Our method works with any existing constraint op-
timization algorithm but is designed for a particular
problem class. Kinnebrew and Biswas (2009) devel-
oped a hierarchical variant of the contract net protocol
that also offered scalability benefits. Choueiry et al.
(1994) presented abstraction methods for task and re-
source allocation problems and focussed on heuris-
tics that find interchangeable sets of tasks but did not
emphasise production processes. The approach pre-
sented in this paper depends on an interval representa-
tion and does not cover tasks that share resources but
rather deals with resource allocation problems with-
out side effects, as described in Section 2.
Our method combines techniques from traditional
model abstraction from the simulation domain with
constraint programming to solve hierarchical resource
allocation problems. To the best of our knowledge,
this is a novel approach with promising first results as
will be outlined in Section 6.
2 HIERARCHICAL RESOURCE
ALLOCATION PROBLEMS
We first present the abstract structure of the problems
our approach is applicable to and then show how the
load balancing problem in autonomous power plant
management is an example of this problem class. All
problems we consider are representatives of the gen-
eral one-good resource allocation problem without
externalities (Van Zandt, 1995): Given a total quan-
tity x
R
of a resource, find an allocation hx
1
,...,x
n
i of
the resource to n agents to solve
minimise
hx
1
,...,x
n
i
n
∑
i=1
c
i
(x
i
) subject to
n
∑
i=1
x
i
= x
R
where c
i
(x
i
) is a cost function for allocating x
i
of the
resource to agent i. Since this problem is stated to
have no externalities and thus allocations do not have
side effects on other agents, it can be decomposed into
similar independent sub-problems. Therefore, agents
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
16

can be combined in hierarchical organizations. Allo-
cating resources first to organisations of agents and
then distributing the resources within the organisa-
tions solves the overall problem.
The problems covered by our approach take into
account additional aspects: In our setting, the ultimate
problem consists of allocating the production of some
resource to a set of agents such that a given (possibly
predicted) demand is met by the combined production
over a given time range as well or as cost-effectively
as possible. Since meeting this demand is not always
feasible, we encode the deviation of demand and pro-
duction as the cost function to be optimised as op-
posed to stating it as a hard constraint. The possible
contributions of a single agent are however limited to
certain ranges that can include no production at all.
Additionally the allocation in earlier time steps affects
future possible allocations. An allocation of resources
over some time range will be referred to as schedule.
More formally, let A be a set of agents where the
possible contributions to the total demand is given by
L
a
for each a ∈ A , an ordered list of non-overlapping
intervals ∈ R
2
. An agent can be excluded from the
combined allocation if and only if 0 is covered by
some interval. Indeed, the choice of lists of intervals
is motivated by the fact that practical problems may
enforce minimal and maximal economical boundaries
if any contribution is made. But agents can also be
excluded entirely from production. Allocations are
created for a finite time range T from 1 to some up-
per bound max(T ). Similarly, the demand that has to
be satisfied is given by D
t
∈ R, t ∈ T . The produc-
tion assigned to some agent a in time step t is denoted
by P
a
t
. A state Σ
a
t
∈ Σ, t ∈ T , a ∈ A is a set of vari-
ables that contains all information available to a pro-
ducer a up to some time step t that is required to make
decisions over the production in the next time step
t + 1. In particular, Σ
a
t
contains P
a
t
0
for all t
0
∈ 1, . . . ,t,
hence the complete run up to t. Additionally, other
variables such as the number of time steps an agent
did not contribute can be part of Σ
a
t
as they might be
needed for specific constraints such as startup times
for agents. Some constraints employ a pair of func-
tions, c
a
min
,c
a
max
: Σ → R, that restrict the possible al-
locations in the next step based on the current state.
These considerations yield a core optimization
model that needs to be solved:
minimise
P
∑
t∈T
|D
t
−
∑
a∈A
P
a
t
|
subject to ∃[x,y] ∈ L
a
: x ≤ P
a
t
≤ y, ∀a ∈ A, t ∈ T
P
a
t+1
≥ c
a
min
(Σ
a
t
), ∀a ∈ A, t ∈ T
P
a
t+1
≤ c
a
max
(Σ
a
t
),∀a ∈ A, t ∈ T
Abstraction
Synthesis
IAM
SRM
AAM
Synthesis
IAM
SRM
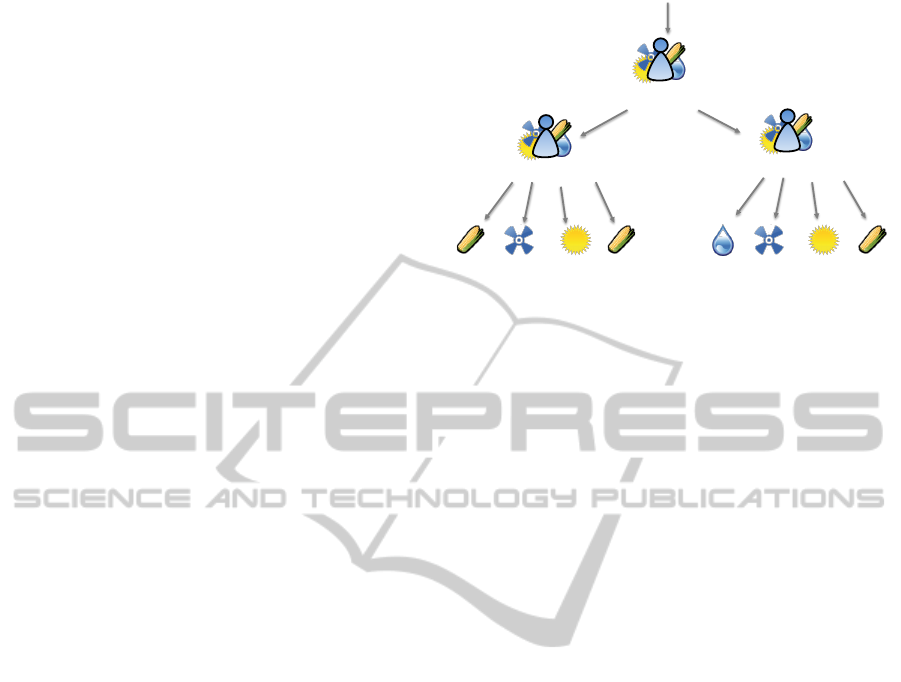
Figure 1: A sample hierarchy of power plants providing.
Bold font indicates model types, arrows represent transfor-
mations between them.
Several agents can be combined to form a new
agent that manages the production of its subordinates
representing an organisation. As this agent is not a
physical producer itself that introduces new possible
contributions but rather combines existing agents we
refer to it as a virtual agent (VA). An agent hierar-
chy H formally is a tree of agents and virtual agents
where for some virtual agent v, children(v) represents
the child nodes of v and a ∈ children(v) holds iff
parent(a) = v. A virtual agent, more precisely, the set
of all its child nodes is also referred to as “region”.
The general algorithm solves the hierarchical re-
source allocation problem in a top-down fashion by
first distributing the demand among the children of
the root agent using a constraint solver and then have
the children recursively solve their allocation problem
until all leaf nodes are assigned some amount of the
resource as Figure 2 shows. In light of this algorithm,
the purpose and necessity of synthesis and abstrac-
tion become clear. Synthesis creates an optimization
problem based on models of concrete agents and ab-
straction leads to a simplified model used for a vir-
tual agent on higher levels. Contrary to the demand
distribution, model synthesis and abstraction are thus
bottom-up algorithms.
There are three different types of models involved
in our approach. The first two model types represent
a mathematical description of the agents’ underlying
physical systems whereas the last model puts these in
an optimisation context. The rationale is to separate
the task of modelling a system from formulating an
optimisation problem. Figure 1 depicts the relation-
ships of models in synthesis and abstraction:
Individual Agent Models (IAM) describe the prop-
erties of one concrete agent representing a physi-
cal entity in terms of constraints for the available
production in T time steps depending on its own
state (being on/off, production levels etc.) regard-
less of other agents. This model needs to be pro-
vided by an agent designer. An IAM defines the
feasible production intervals of an agent but also
regulates possible transitions between production
levels at different time steps.
SynthesisandAbstractionofConstraintModelsforHierarchicalResourceAllocationProblems
17
Abstracted Agent Models (AAM) are simplified
agent models of a set of underlying agents that
capture the essentials and serve as models of
virtual agents that can be given to a superior
instance. To this higher instance, it does not
matter whether it is confronted with an individual
agent or an already abstracted model.
Synthesised Regional Models (SRM) combine sev-
eral agent models to yield the regio-central con-
straint models which describe the resource allo-
cation problem within a virtual agent. The com-
bined production is the sum of all subordinate pro-
ductions. Additionally, constraints such as “pre-
fer agents of type X” or “distribute residual load
evenly” can be stated here. These types of mod-
els include both the actual load distribution opti-
mization problem as well as the models used in
sampling abstraction. Since preferences or soft
constraints can be stated in addition to hard con-
straints, the resulting problems are instances of
soft constraint models (Meseguer et al., 2006).
Let AM be the set of agent models such that
AM = IAM ∪ AAM and SRM ⊂ SCSP the set of soft
constraint satisfaction or optimization problems that
model a region. We can then first define the synthesis
and abstraction processes:
synth : 2
AM
→ SRM
abstract : 2
AM
→ AM
Hence, synthesis creates an optimization problem for
resource allocation based on the formal models of a
set of agent models. Abstraction creates another agent
model from a set of agent models representing the un-
derlying agents. We will describe the contents of the
synth and abstract procedures in the following sec-
tions but first show concrete problem instances.
3 INSTANCES OF
HIERARCHICAL RESOURCE
ALLOCATION
To illustrate our approach, we present two concrete
instances of hierarchical resource allocation prob-
lems. Our case study is taken from distributed energy
management systems. To illustrate the generality of
our approach, we additionally show a load balancing
problem in server clusters in our framework.
Organization
Organization
Top-Level-
AVPP
50K kWh
30K kWh
20K kWh
10K
5K
5K 10K
15K
0K 3K
2K
Figure 2: An exemplary AVPP structure. AVPPs can con-
tain other AVPPs. Leaf nodes indicate different types of
power plants (e.g., wind, solar, biomass, running water).
Edges indicate how the incoming load is distributed.
3.1 Hierarchical Power Plant
Scheduling
Future energy management systems require flexible
resource allocation mechanisms. Or, as Ramchurn
et al. (2012) put it: “It will be important to design de-
centralised coordination algorithms and strategies that
allow individual [. . . ] participants to come to the most
efficient arrangements within a reasonable time.” One
of the most prominent tasks is to control power plants
in a way that balances production and demand. In par-
ticular, these two quantities need to be in approximate
equilibrium as to keep the mains power frequency in a
small corridor to achieve stable power supply (Heuck
et al., 2010). The output of power generators needs
to be controlled in accordance to the predicted con-
sumption. However, the problem of load balancing
in energy systems is known to be an NP-hard prob-
lem in general (Bar-Noy et al., 2001) and therefore
centralised solutions fail to scale with an increasing
number of controlled plants.
Our approach is based on the notion of Au-
tonomous Virtual Power Plants (AVPPs) (Stegh
¨
ofer
et al., 2013a). Figure 2 shows a typical AVPP struc-
ture which embodies a control scheme for the load
distribution in the context of a self-organizing sys-
tem. An AVPP takes the role of a virtual agent re-
sponsible for a set of subordinate power plants and
can itself be controlled in a hierarchy. Each AVPP
is responsible for satisfying a fraction of the over-
all demand. Its structure changes in response to new
information and changing conditions to enable each
AVPP to balance its power demand and production
(consequently forming the hierarchy as described in
Stegh
¨
ofer et al., 2013b) — thus fast recombination
is desirable. Each AVPP calculates schedules that
manage the output of its assigned controllable power
plants for future points in time and therefore also its
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
18

own output. AVPPs need to rely on predictions about
the future demand as well as the future output of non-
controllable power plants to approximate the residual
load (i.e., the consumption minus the production sup-
plied by non-controllable plants) which has to be met
by controllable power stations. Arising uncertainties
are dealt with by means of robust optimization meth-
ods using trust-based scenarios as described in (An-
ders et al., 2013a).
In the context of power management, the resource
is electric power and we refer to an allocation of the
residual load to power plants for some time range
as the schedule. The common optimization prob-
lem structure presented in Section 2 thus applies with
power stations being the agents and AVPPs the virtual
agents. Power plant models need at least to provide
some minimal and maximal power boundaries, P
a
min
and P
a
max
since power stations have a lower bound for
economically reasonable production. The predicted
residual load represents the demand. In addition, var-
ious plant-specific constraints may describe the char-
acteristics of a power station such as a minimal startup
time, minimal running and standing times and, most
prominently, a limited rate of change P
a
δ
between two
consecutive time steps which may be relative to the
current production or a fixed amount. As we assume
that the agents’ contributions are subject to inertia —
a typical property of power generators — the resource
allocation problem needs to be solved for a future
time frame in advance (Heuck et al., 2010; Anders
et al., 2013b).
3.2 Cluster Load Balancing
Consider the problem of load balancing HTTP re-
quests in a cluster of servers inspired by efforts to
distribute processing capacity in grid applications in-
vestedigated by Abouelela and El-Darieby (2012).
Assume that “masters” are capable of assigning re-
quests to “slaves” that handle the requests. A slave
needs to communicate the minimal and maximal
number of requests it may process at one time step
to its master — minimal requests are useful to justify
the communication overload associated with employ-
ing a machine. The masters are organised hierarchi-
cally, where one master needs to represent the capa-
bilities of its subordinate slaves or masters and a top
level master receives the incoming requests. Upon de-
ciding what number of requests the slaves receive to
process, actual requests are distributed. Note that we
do not argue that this approach is the most efficient
way to solve this problem but rather shows another
possible application of model synthesis and abstrac-
tion.
The set A consists of the slaves and masters,
where the latter represent virtual agents that are or-
ganised in a given hierarchy. The production P
a
t
rep-
resents the number of requests handled by agent a in
time step t as a natural number. In this model, the
states Σ
a
t
track the requests currently processed to pre-
dict how many requests can be taken in step t + 1.
4 SYNTHESIS OF
REGIO-CENTRAL MODELS
Aside from the generally required parameters of the
individual agent models introduced in Section 2 such
as the possible contributions of agents, the constraint
models can exhibit varying characteristics regarding
feasible schedules. These may take the form of con-
straints that restrict the change in production of an
agent to less than x% between two time steps or that
requires an agent to contribute for a minimum number
of consecutive time steps.
In our approach, we distinguish constraint models
used as declarative formal models of the producing
agents (AM) and models for optimising the resource
allocation problem (SRM). Individual preferences are
formulated as soft constraints and influence the op-
timisation function. Such preferences could include
that it is better to stay within a subrange of production
for an IAM or that all agents are equally contributing
instead of an extremal distribution for a SRM. They
are specified as constraint relationships (Schiendorfer
et al., 2013) which, in essence, are a binary relation
over the soft constraints that induce a partial order
over solutions. If no solution for all constraints can
be found, constraint relationships define which con-
straints are more important to be satisfied and encode
this information as weights that serve as penalties for
an optimisation function. Intuitively, more important
constraints receive higher weights so a quantitative
cost function consistent with the induced partial or-
der is created.
An IAM or AAM for an agent a provides a list
of feasible production spaces L
a
as well as con-
straints that regulate production transitions between
time steps. A SRM for a virtual agent v results from
combining a set of agent models of its children and
is a soft constraint satisfaction problem (SCSP) given
by hX , D, C ,R i for some time range T where
• X are decision variables that take values from
their associated domain D(x), for x ∈ X . In par-
ticular, P
a
t
⊆ X , t ∈ T , a ∈ children(v).
• C are constraints that specify which assignments
of values to variables are valid. Constraints can
SynthesisandAbstractionofConstraintModelsforHierarchicalResourceAllocationProblems
19

either be specified intensionally (P
a
t
≥ 500) or ex-
tensionally (by enumerating valid variable assign-
ments). There exist hard constraints, C
h
, that are
mandatory and soft constraints, C
s
, which should
be satisfied as well as possible such that C
h
∪C
s
=
C , C
h
∩ C
s
=
/
0. The constraints stated in AMs are
combined by taking their union since their scopes
do not overlap (each AM constraint regulates as-
signments to variables over time in one agent).
• Constraint Relationships, R ⊂ C
s
× C
s
define a
binary preference relation such that c
1
R
c
2
iff
c
1
is more important than c
2
. Each agent may
provide such a relation for its soft constraints
such as “optimalRange :(1000 ≤ P
a
t
≤ 2000)
acceptableRange :(500 ≤ P
a
t
≤ 2500)” to state its
individual preferences regarding its own contribu-
tion (for the implementation, constraint relation-
ships are transferred into weights such that for
each agent a utility function over solutions can be
constructed – see Schiendorfer et al., 2013).
In addition to taking the union of all variables and
domains of the agent models under renaming to avoid
name clashes when creating the SRM, for a virtual
agent v, a variable P
v
t
is added to represent the ac-
cumulated production for each time step t. Consis-
tency is enforced by a hard constraint P
v
t
=
∑
a∈A
v
P
a
t
,
where A
v
are the children of v. The union of all con-
straint relationship sets is taken and possible organi-
sational soft constraints of the SRM (such as “balance
the load assignment”) are defined to be more impor-
tant than the soft constraints of the AMs as organisa-
tional goals such as an even distribution are designed
to be more important than individual preferences. An
optimisation problem is then defined by adding an op-
timisation function f : (X → D) → R. Hence, solu-
tions (assignments satisfying all hard constraints) are
totally ordered. Minimizing the gap between demand
and production is then achieved by using the function
presented in Section 3: minimise
∑
t∈T
|D
t
− P
v
t
|. In-
corporating constraint relationships requires the solu-
tion of a multi-objective optimisation problem, i.e.,
the original objective as well as the violation of soft
constraints have to be optimised. Other objectives
such as cost effectiveness could be encoded. This
synthesised regional model is then used to solve the
actual resource allocation problem with constraint or
mathematical programming algorithms such as mixed
integer programming (MIP).
5 ABSTRACTION OF
REGIO-CENTRAL MODELS
Virtual agents can be regarded as another type of pro-
ducing agent that itself might be controlled. In fact,
every VA other than the top-level VA is managed by
a superior agent. Consequently, this governing VA
also needs a constraint model of its subordinate agents
in order to distribute the demand. Instead of just
merely copying all constraints and decision variables
included in the SRM to higher hierarchy levels (which
would effectively just result in a centralised model)
we introduce some reduction of complexity by an au-
tomated abstraction algorithm. Certainly, abstraction
will cause to errors due to imprecisions but leads to
a scalable resource allocation scheme. We will dis-
cuss possible approaches to construct a valid AAM of
a virtual agent.
Since the AAM should be equivalent to an IAM
in the sense that a superior agent does not need to
bother whether it manages a virtual or concrete agent,
an AAM also defines possible production ranges and
transitions between productions for P
v
t
. Thus, ab-
straction aims to describe the available ranges of pro-
duction of a synthesised model in a compact way and
introduces new constraints representing the relations
of the aggregate of all subordinate agents. We are
interested in finding the “corners” of the production
space spanned by a VA as well as possible “holes”,
i.e., contributions that can never be produced by a VA
in its current configuration. We propose three differ-
ent kinds of abstraction that result in different con-
straints for P
v
t
that can be combined to obtain one ab-
stracted constraint model.
5.1 General Abstraction
A first question of interest for abstraction is to find
feasible intervals of a VA given the possible produc-
tions of its subordinate agents. As the contribution of
an individual agent may be discontinuous (e.g., when
an agent has a minimal production boundary > 0 but
may also not contribute at all), the possible space of
production is discontinuous in general: Consider a
VA responsible for two agents and the possible con-
tribution for both agents are given by {[0, 0], [1, 4]}
and {[0, 0], [7, 10]} where the [0, 0] interval indicates
that the agents might not contribute to the combined
production. Then every production from [1, 4] can be
reached by if agent 1 is switched on and agent 2 is
off – conversely, the VA can produce [7,10] if only
agent 2 is running. Engaging both agents leads to a
combined production of [8,14] and analogously 0 can
be produced by excluding them both. However, no
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
20

output in the interval (4, 7) can be provided. Since
abstraction is only concerned with the feasible ranges
of the VA in total, it is not relevant whether, e.g., out-
put 8 is created by setting P
1
to 1 and P
2
to 7 or by
P
1
to 0 and P
2
to 8. We can thus contract the overlap-
ping intervals [7,10] and [8,14] to [7,14]. The feasible
regions of that VA are given by {[0,0],[1,4],[7,14]};
the unique hole is (4,7) and 0 and 14 constitute mini-
mal and maximal production.
From this example, we derive a formulation of
general abstraction that returns the possible produc-
tions of a VA. Let ⊕ be the standard plus opera-
tion in interval arithmetic such that [x
1
,y
1
]⊕[x
2
,y
2
] =
[x
1
+ x
2
,y
1
+ y
2
] which will be used to calculate the
possible combined production of two agents. Further,
we recursively define an operation ↓ which takes a
sorted list of intervals (in ascending order of the lower
bounds of the intervals) and merges overlapping inter-
vals such that, e.g., h[1,5],[4,7]i↓ = h[1,7]i. Concate-
nation of lists is written as L
1
+ L
2
.
hi↓ = hi
h[x,y]i↓ = h[x,y]i
(h[x
1
,y
1
],[x
2
,y
2
]i + L)↓ =
(
h[x
1
,y
1
]i + (h[x
2
,y
2
] + L)↓) if y
1
< x
2
(h[x
1
,max{y
1
,y
2
}]i + L)↓ else
Possible contributions of an agent are given by a
sorted list L
a
of non-overlapping intervals. Since an
agent may contribute in any of the offered intervals,
we have to match any two intervals. Therefore we
lift the above mentioned combine operation ⊕ to lists
and reuse the same operator symbol. The resulting list
is then sorted by the intervals’ lower boundaries and
contracted using ↓.
L
a
⊕L
b
:= sort({L
a
i
⊕L
b
j
| 1 ≤ i ≤ |L
a
|,1 ≤ j ≤ |L
b
|})↓
We extend the binary operation and write
L
L
i
∈L
L
i
=
L
1
⊕(L
2
⊕(...L
n
)) for some finite set of lists. Finally,
we define that L
v
=
L
a∈children(v)
L
a
. General abstrac-
tion immediately leads to a set of constraints that can
be used to describe the feasible space for P
v
of a VA:
∀t ∈ T : ∃[x,y] ∈ L
v
: x ≤ P
v
t
≤ y
Note that this form is suited for hierarchical decom-
position as input and output are both expressed as lists
of feasible intervals.
5.2 Temporal Abstraction
While general abstraction describes feasible regions
of a VA, it fails to consider states such as the current
productions. Temporal abstraction calculates infeasi-
ble ranges after t time steps from now on given some
initial state Σ
0
. Consider an AVPP with one power
plant that is disconnected (or servers in the cluster that
are busy for several future steps). Assume that this
plant is starting up and can only begin contributing in
t
0
steps. Then for t
0
time steps, using general abstrac-
tion alone would lead to the incorrect assumption that
the full range of production is available.
For a VA v, some production level p after t time
steps only depends on the productions that can be of-
fered by their children after t steps. We are guaranteed
to exclude infeasible ranges if every child’s produc-
tion is both minimised and maximised with respect to
all constraints and the current states after t steps and
the resulting intervals are merged to obtain bounds for
the VA. We write Σ
a
m
to denote the current minimal
and maximal state (m ∈ {min,max}) for agent a. We
exclude the hierarchical case in the presentation of the
algorithm and assume that all children are concrete
agents — however it is straightforward to include an
existing list of intervals for each time step instead of
minimising and maximising before merging when us-
ing an AAM as child agent.
Algorithm 1: Temporal Abstraction to exclude infeasible
ranges.
1: procedure TEMPORAL-ABSTRACTION(v, Σ
0
)
2: ∀a ∈ children(v) : Σ
a
min
,Σ
a
max
← Σ
a
0
3: for all {t ∈ T } do
4: I ←
/
0
5: for all {a ∈ children(v)} do
6: P
a
t,min
← max({c
min
(Σ
a
min
) : c ∈ C
a
})
7: P
a
t,max
← min({c
max
(Σ
a
max
) : c ∈ C
a
})
8: I ← I ] {[P
a
t,min
,P
a
t,max
]}
9: Σ
a
min
← Σ
a
min
∪ {ht, P
a
t,min
i}
10: Σ
a
max
← Σ
a
max
∪ {ht, P
a
t,max
i}
11: L
v
t
←
L
i∈I
i
12: return {L
v
t
| t ∈ T }
If the possible changes allowed by constraints can
be expressed by functions, we can use Algorithm 1 to
exclude infeasible parts of the search space efficiently.
For a future time step t, we identify the minimal and
maximal contribution of each child a with respect to
all its constraints C
a
by taking the minimal maximal
value as upper bound and analogously for the lower
bound. To get the min and max contribution of the
VA in this time step, we combine and merge the re-
sulting intervals. Furthermore, we remember the min
and max bounds in Σ
a
min
and Σ
a
max
to be able to calcu-
late similar limitations for time step t + 1. We write
L
v
t
to represent the feasible regions of v after t steps
which corresponds to the merged grey intervals in
Figure 3 — which further constrain feasible sched-
ules in addition to the general bounds represented by
the merged white intervals established by general ab-
straction. To illustrate the concept of such constraint
SynthesisandAbstractionofConstraintModelsforHierarchicalResourceAllocationProblems
21

Figure 3: Temporal abstraction for a VA consisting of three
agents. White boxes indicate general bounds, grey areas
represent the boundaries at step t. Agent 1 needs two time
steps to start up and is then available at its minimum output.
functions, consider a fixed rate of change constraint
c: c
min
(Σ
a
t
) := P
a
t
−P
a
δ
and c
max
(Σ
a
t
) := P
a
t
+P
a
δ
. We
assume that constraints regarding minimal and max-
imal productions given in L
a
are also represented by
functions c
min
and c
max
(with, e.g., c
max
being a con-
stant returning P
a
max
or valid transitions for “jumping”
from one interval to another).
Temporal abstraction thus adds constraints ex-
cluding infeasible regions for specific time steps.
These constraints are as well only concerned with
P
v
t
and therefore seamlessly integrate with the AAM
found by general abstraction but further reduce the ab-
stracted search space.
∀t ∈ T : ∃[x,y] ∈ L
v
t
: x ≤ P
v
t
≤ y
In addition to the general boundaries L
v
that hold for
all time steps we constrain P
v
t
(the production in the
first time step) to lie in an interval specified by L
v
t
.
Since these temporal boundaries converge to the gen-
eral boundaries for future time steps, it would suffice
to only use them as they constitute a subset of L
v
. In
practice, however, it is more convenient to specify L
v
constraints for all time steps and use the subset of all
L
v
t
that actually restricts the search space and stop the
calculation after the general boundaries are reached.
5.3 Sampling Abstraction
In addition to existing abstraction mechanisms that
yield constraints shrinking the search space of the
production of a virtual agent, we are interested in
functional relationships between variables of the re-
gional model. In particular, the maximal production
change from one time step to another given the cur-
rent aggregated production is of interest to improve
the accuracy of the AAM. Even though temporal ab-
straction excludes ranges after t steps, it does not offer
any boundaries between two consecutive time steps.
A schedule that switches from minimal to maximal
production values within the limitations of L
a
t
would
be valid according to temporal abstraction but inaccu-
rate given the underlying physical systems’ possible
inertia. Similarly, a cost function could map the ag-
gregated production to the minimally required cost for
a different optimization objective.
Therefore, we acquire an abstract representation
of these functional relationships by sampling, i.e.,
solving several optimization problems and collecting
output values. Concretely, these problems consist of
the constraints in the SRM (the union of all agent
models) and introduce an additional constraint that
fixes the input variable to some particular value. Us-
ing this model, the output variable is minimised or
maximised. P
v
0
(with P
v
0
still being the sum of all P
a
0
)
is, e.g., bound to be 400 and the objective is to max-
imise P
v
1
. This procedure is iterated for all future time
steps. Then, the resulting pairs of fixed input and out-
put for individual time steps can be represented by a
suitable approximation method. We currently employ
piecewise linear functions that are readily supported
by MIP or constraint solvers and have been applied in
model abstraction in simulation engineering (Frantz,
1995).
Algorithm 2: Sampling Abstraction for change speeds.
Require: hX ,D,Ci is the SRM of v
Ensure: P
v+
δ
are pairs of the positive change speed
1: I ← s sampling points ∈ [P
v
min
,P
v
max
]
2: procedure SAMPLING-ABSTRACTION(v, s)
3: for all {i ∈ I } do
4: C
0
← C ∪{(P
v
0
= i)}
5: o ← solve hX ,D, C
0
i : maximise P
v
1
6: P
v+
δ
← δ
+
∪ {(i,o)}
7: return pwLinear(P
v+
δ
)
After finding the feasible production ranges of a
VA by general abstraction as input space, we can per-
form sampling abstraction by using a number of sam-
pling points distributed across the production range
and collect the respective outputs. As of now, the
sampling points are selected equidistantly across the
full range. We sketch the approach in Algorithm 2 for
the positive production change speed P
v+
δ
(the nega-
tive case works analogously). As the resulting prob-
lems can still be NP-hard, we need to make sure that
the time spent for optimizing is bounded, e.g., by set-
ting a time limit and giving up on an input point if
no solution is found after that timeout is exceeded or
using an anytime algorithm that runs for a fixed dura-
tion. If further properties of the function are known
such as monotonicity (x ≤ y → f (x) ≤ f (y)) or exten-
sivity (x ≤ f (x)) this information can help to shrink
the search space for the resulting sampling problems.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
22

In our evaluation case study (see Table 2) more sam-
pling points lead to increased accuracy in abstrac-
tion. In practice, an incremental approach that re-
calculates these functions in a background process is
useful to obtain more accurate representations while
initially offering a cruder variation faster. The “sam-
pled” piecewise linear function can then be used for
additional constraints in the AAM in analogy to the
optimization problem in Section 2:
∀t ∈ T \ {max T } : P
v
t+1
≤ P
v+
δ
(P
v
t
)
∀t ∈ T \ {max T } : P
v
t+1
≥ P
v−
δ
(P
v
t
)
6 EVALUATION
The presented concept illustrated how model synthe-
sis and abstraction can be applied to hierarchical re-
source allocation problems to enable an agent-based
solution. In order to obtain a quantification of the
speed and quality impact of this scheme, an evalua-
tion was performed for the energy management exam-
ple. A centralised solution that consists of planning
the outputs of all power plants at once is compared
to a regio-central approach using model abstraction.
This is primarily motivated by the need of comparing
optimal solutions to the ones found in a regio-central
setting.
6.1 Experimental Design
We use power plant models that are formulated as
mixed integer programs and can hence be solved
with the standard mathematical programming soft-
ware IBM ILOG CPLEX (CPLEX, 2013). Given the
same power plants and initial states, the problem is
solved with a central model and in the regio-central
approach to obtain comparable results. The following
input parameters specify an experiment run:
n the number of power plants
hc defines the strategy of hierarchy creation (we ei-
ther specify a unique maximal number of nodes
per AVPP or distinguish between leaf nodes that
only control physical power plants and inner
nodes that control other AVPPs in analogy to a B+
tree; then two parameters for AVPPs and plants
per AVPP are needed). We write h for the height
of the resulting AVPP tree.
s specifies how many sampling points are used
Additionally, random seeds for all non-deterministic
aspects (combination of different constraints to plant
models, initial states and hierarchy formation) com-
plete the full specification of one repeatable exper-
iment run. Real world data for minimal and maxi-
mal production boundaries are taken from (Deutsche
Gesellschaft f
¨
ur Sonnenenergie e.V., 2013) and the
real world load curves are taken from (LEW Verteil-
netz GmbH, 2013). Change speeds for power plants
are generated randomly within typical boundaries. A
random hierarchy is then formed using parameter hc.
After this setup is completed, the distribution of resid-
ual load to power plants is done for 43 time steps of
15 minutes (in total a half day of prediction) with each
run assigning load for 5 time steps in advance. The
centralised model takes exactly the same form as if it
were a single AVPP responsible for all power plants.
This is to ensure that no bias is introduced by the mod-
elling or solver configuration.
Several measurements are taken to compare the
quality of solutions (c, rc are subscripted for central
and regio-central, where applicable). These values are
averaged over multiple runs with differing initial ran-
dom seeds.
tr is the total runtime for the top level resource allo-
cation problem
tr/t is the runtime per time step;
tr
abs
is the total runtime spent for abstraction; gen-
eral and sampling abstraction only have to be
performed at the beginning of the experiment
whereas temporal abstraction takes place in every
time step. We therefore divide those times into
“fixed” (tr
f
abs
) and “variable” (tr
v
abs
) runtimes in
abstraction.
v is the total violation (i.e., the difference between
demand and combined production) over all con-
crete power plants to have a bottom line compari-
son relative to the demand;
ae measures the abstraction error that results if a su-
perior AVPP assigns a load to an AVPP that it
should be able to produce according to abstraction
but in fact cannot. The abstraction error is given
relative to the actually assigned load.
The experiment suite and full source code includ-
ing an instruction on how to run the experiments
used for this paper can be found online at (http://
www.informatik.uni-augsburg.de/lehrstuehle/swt/se/
staff/aschiendorfer/) in an attempt to provide repli-
cable research (Vandewalle, 2012). Each presented
experiment was run on a machine having 8 Intel
Xeon CPU 3.20 GHz cores and 14.7 GB RAM on a
64 bit Windows 7 OS with 8 GB RAM offered to the
Java 7 JVM running the abstraction algorithm as well
as the CPLEX optimiser.
SynthesisandAbstractionofConstraintModelsforHierarchicalResourceAllocationProblems
23
All central models used for comparison were
solved with a 30 minutes time limit per time step.
Therefore, the solver might not have produced an op-
timal solution before this time out. The time limit is
due to the 15 minute time window present in power
systems to plan ahead. As we wanted to obtain as
good a central solution as possible for comparison,
we extended this window slightly.
6.2 Experimental Results
We examine questions of interest and present the re-
sults of the experiment runs.
Scalability. Does the size of the problem impact the
performance in terms of time and quality? We expect
that after a certain number of power plants, the time
spent on abstraction is worthwhile given the runtime
performances per time step. Each hierarchy is con-
structed by taking leaf AVPPs with 20 physical power
plants each and inner nodes having a capacity of 5 (a
“B+ tree” hierarchy).
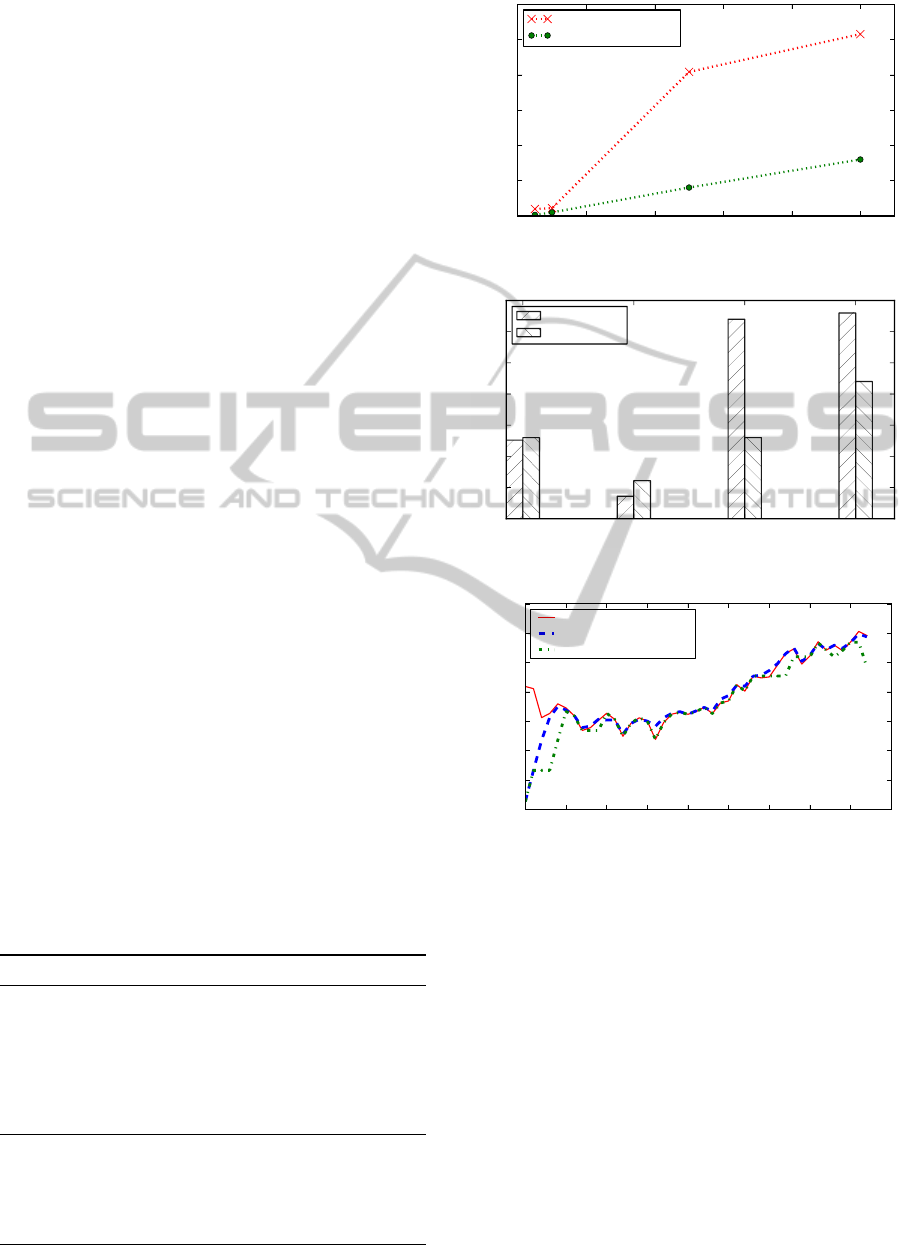
Table 1 shows how the regio-central approach
scales with rising problem size. For all input sizes,
the average violations were in similar ranges. For
n = 500 and n = 1000 the regio-central method per-
formed even better than the central model on average
as Figure 5 shows. This can occur due to the time
limit which, when exceeded, causes the states of all
power plants to remain unchanged for one time step.
Total runtimes are compared in Figure 4. In particular,
the runtimes per time step are relevant for the contin-
uous operation of the control scheme — after paying
an initial price for the construction of abstracted mod-
els, the average times are below one minute even for
Table 1: Comparison of measurements depending on differ-
ent power plant numbers. Values below the horizontal line
are only relevant to the regio-central approach. Times are
given in seconds and c and rc subscripts denote central and
regio-central, respectively.
n 50 100 500 1000
tr
c
1995.29 2231.21 40850.04 51557.12
tr
c
/t 46.40 51.89 950.00 1199.00
v
c
1.26% 0.36% 3.20% 3.30%
tr
rc
318.50 1036.22 8073.79 16018.25
tr
rc
/t 4.50 18.85 139.79 311.43
v
rc
1.30% 0.61% 1.30% 2.20%
tr
rc
/tr
c
15.96% 46.4% 19.76% 31.07%
h 1 1 2 3
tr
f
abs
125.10 224.86 2079.21 2626.7
tr
v
abs
0.28 1.00 17.00 32.00
tr
v
abs
/t 0.01 0.024 0.39 0.73
ae 0.01% 0.2% 0.2% 0.7%
0 200 400 600 800 1000
n (# plants)
0
10000
20000
30000
40000
50000
60000
t(secs)
Runtime Central
Runtime Regio-Central
Figure 4: Total runtimes central vs. regio-central.
50 100 500 1000
n (# plants)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
Violation in % of target load
Central
Regio-Central
Figure 5: Violation grouped by problem size and algorithm.
0 5 10 15 20 25 30 35 40 45
t (time steps)
700000
800000
900000
1000000
1100000
1200000
1300000
1400000
P(kW h)
Residual Load
Production Regio-Central
Production Central
Figure 6: Solution for 1000 power plants and a half day in
15 minute steps, central, taken from Table 1; steps in the
central model indicate that no solution was found after 30
minutes.
1000 power plants. The percentage of runtime tr
rc
/tr
c
shows that the regio-central approach needed a com-
paratively small fraction of time to come up with sim-
ilar results regarding the violation. Figure 6 visu-
alises the total violation between residual load and
production for 1000 power plants from the run shown
in Table 1. These results support the suitability of
the regio-central approach in comparison with a cen-
tral solution for practical settings in distributed energy
management.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
24

Table 2: Comparison of different sampling frequencies. As
the problem is equivalent for all runs and thus objectives are
equal for all runs, the runtimes of one central solutions are
shown here as a representative sample.
s 5 10 15 20
tr
c
2235.83 2235.83 2235.83 2235.83
tr
c
/t 52.00 52.00 52.00 52.00
v
c
0.36% 0.36% 0.36% 0.36%
tr
rc
1036.22 2104.77 2035.38 3342.05
tr
rc
/t 18.85 29.34 17.26 35.26
v
rc
0.61% 0.49% 0.49% 0.45%
tr
f
abs
224.86 842.99 1293.40 1825.62
tr
v
abs
1.00 7.00 18.00 15.00
tr
v
abs
/t 0.024 0.17 0.42 0.34
ae 0.2% 0.13% 0.15% 0.14%
Sampling Accuracy. How many sampling points
are needed to arrive at a good accuracy while not ex-
ceedingly spending time on abstraction? We expect
to see a tradeoff between the time spent on abstrac-
tion and the obtained accuracy. Experiments are con-
ducted for 100 power plants, half a day and varying
sampling points. Results are given in Table 2.
As we can see, the runtimes rise with the number
of sampling points due to the number of optimization
problems that have to be solved in abstraction. Com-
pared to the optimum of 0.36%, we can get as close
as to 0.45% by using 20 sampling points. However,
the runtime then even exceeds that of the central solu-
tion while providing a worse solution. A compromise
is already found at 5 sampling points which offer an
average violation of 0.61% in half of the runtime.
Hierarchy Influence. How does the hierarchy
depth affect the quality and runtime? For this exper-
iment, we compared results from 100 and 500 power
plants and varied the number of plants per AVPP. In-
teresting quantities are the abstraction error and opti-
mization objective connected to those input parame-
ters. Table 3 lists the results for different input sizes n
and plants per AVPP p. Experiments with 500 power
plants have a growing capacity towards the leaves for
performance reasons. We see that the capacity of the
AVPPs affects quality, abstraction error, and runtime
of the runs. For both 100 and 500 power plants, nodes
of 15 plants are able to obtain better solutions by hav-
ing more information available at once. Also the ab-
straction error clearly increases with smaller AVPPs
since small AVPPs imply more hierarchy levels and
thus more abstraction. Compared to Table 1 where a
hierarchy of 5 AVPPs per AVPP and 20 plants within
the leaf nodes was used, we also see that the runtimes
increase with higher capacity so a balance between
speedup by decomposition and complexity due to in-
formation collection has to be found.
Table 3: Comparison of different hierarchies. As the prob-
lem is equivalent for different AVPP capacity in the central
case, runtime of the central solution does not change for
different p.
(n/p) 100/5 100/15 500/5 500/15
tr
c
2389.31 2389.31 67403.25 67403.25
tr
c
/t 55.56 55.56 1567.51 1567.51
v
c
0.36% 0.36% 3.80% 3.80%
tr
rc
1261.49 821.00 3820.03 6832.20
tr
rc
/t 7.96 6.38 39.80 104.41
v
rc
0.97% 0.51% 1.80% 1.62%
tr
f
abs
919.28 546.75 2108.64 2342.92
tr
v
abs
/t 0.005 0.007 0.008 0.057
ae 3.80% 0.3% 2.10% 0.49%
7 DISCUSSION AND
CONCLUSIONS
In this work, we presented techniques for synthesiz-
ing and abstracting constraint models that can be used
with a constraint solver in a hierarchical regio-central
fashion to reduce the complexity of a resource alloca-
tion problem. Aside from practical benefits in terms
of modelling and supporting different types of agents,
we showed empirically that this approach works well
for an NP-hard problem in energy management. In
particular, the run times grow almost linearly with
the input size in the observed range of problem sizes
which is important for real-time settings while main-
taining a solution quality comparable to an optimal
solution.
However, one governing assumption states that a
formal constraint model is available for every agent
to be controlled by this scheme. In reality, this might
not always be the case — be it for practical rea-
sons, privacy issues (see e.g. Anders et al., 2013b)
or situations where a simulation is necessary to de-
termine feasibility (Bremer et al., 2010) instead of a
closed form logical formula. Therefore we plan to
integrate this approach with a learning algorithm that
constructs models of producing agents from analysing
market behaviour in a multi-agent system. Addi-
tionally, the experiments showed that the quality of
solutions and abstraction error is dominated by the
number of available sampling points. One interest-
ing direction for future work lies in investigating if
there are better choices for sampling points by draw-
ing techniques from active learning or response sur-
faces (Boyle, 2007).
Furthermore, we mainly focussed on the problem
of minimizing a deviation between demand and com-
bined production even though a more difficult but eco-
SynthesisandAbstractionofConstraintModelsforHierarchicalResourceAllocationProblems
25

nomically important use case would optimize costs. A
two-stage optimization process that first finds an opti-
mal solution and then tries to optimize soft constraint
violation based on constraint relationships (Schien-
dorfer et al., 2013) while staying within a predefined
range around the regional optimum is planned.
ACKNOWLEDGEMENTS
The authors thank Gerrit Anders for his valuable feed-
back. This research is partly sponsored by the re-
search unit “OC-Trust” (FOR 1085) of the German
research foundation (DFG).
REFERENCES
Abouelela, M. and El-Darieby, M. (2012). Multido-
main hierarchical resource allocation for grid applica-
tions. Journal of Electrical and Computer Engineer-
ing, 2012.
Anders, G., Siefert, F., Stegh
¨
ofer, J.-P., and Reif, W.
(2013a). Trust-based scenarios – predicting future
agent behavior in open self-organizing systems. In
Proc. of the 7th Int. Workshop on Self Organizing
Systems (IWSOS) 2013, Palma de Mallorca. Springer
Berlin Heidelberg.
Anders, G., Stegh
¨
ofer, J.-P., Siefert, F., and Reif, W.
(2013b). A Trust- and Cooperation-Based Solution of
a Dynamic Resource Allocation Problem. In 7th IEEE
International Conference on Self-Adaptive and Self-
Organizing Systems (SASO), Philadelphia, PA. IEEE
Computer Society, Washington, D.C.
Bar-Noy, A., Bar-Yehuda, R., Freund, A., Naor, J., and
Schieber, B. (2001). A Unified Approach to Approxi-
mating Resource Allocation and Scheduling. Journal
of the ACM (JACM), 48(5):1069–1090.
Boudjadar, A., David, A., Kim, J. H., Larsen, K. G., Miku-
cionis, M., Nyman, U., and Skou, A. (2013). Hierar-
chical scheduling framework based on compositional
analysis using uppaal. In Proceedings of FACS 2013,
Lecture Notes in Computer Science. Springer.
Boyle, P. (2007). Gaussian processes for regression and op-
timisation. PhD thesis, Victoria University of Welling-
ton.
Bremer, J., Rapp, B., and Sonnenschein, M. (2010). Sup-
port vector based encoding of distributed energy re-
sources’ feasible load spaces. In Innovative Smart
Grid Technologies Conference Europe (ISGT Europe),
pages 1–8. IEEE Power Society.
Chevaleyre, Y., Dunne, P. E., Endriss, U., Lang, J.,
Lemaitre, M., Maudet, N., Padget, J., Phelps, S.,
Rodr
´
ıguez-Aguilar, J. A., and Sousa, P. (2006). Is-
sues in multiagent resource allocation. Informatica,
30(1):3 – 31.
Choueiry, B. Y., Faltings, B., and Noubir, G. (1994). Ab-
straction methods for resource allocation. Technical
report, Swiss Federal Institute of Technology in Lau-
sanne (EPFL).
CPLEX (2013). IBM ILOG CPLEX Optimizer. Online
Resource, last accessed December 2013: http://
www-01.ibm.com/software/commerce/optimization/
cplex-optimizer/.
Deutsche Gesellschaft f
¨
ur Sonnenenergie e.V. (2013). En-
ergymap. Online Resource, last accessed December
2013: http://www.energymap.info/.
Frantz, F. (1995). A taxonomy of model abstraction tech-
niques. In Simulation Conference Proceedings, 1995.
Winter, pages 1413–1420.
Giunchiglia, F. and Walsh, T. (1992). A theory of abstrac-
tion. Artificial Intelligence, 57(2):323–389.
Heuck, K., Dettmann, K.-D., and Schulz, D. (2010). Elek-
trische Energieversorgung. Vieweg+Teubner. (in Ger-
man).
Hladik, P.-E., Cambazard, H., D
´
eplanche, A.-M., and
Jussien, N. (2008). Solving a real-time allocation
problem with constraint programming. Journal of Sys-
tems and Software, 81(1):132–149.
Kinnebrew, J. S. and Biswas, G. (2009). Efficient allocation
of hierarchically-decomposable tasks in a sensor web
contract net. In Proc. of the 2009 IEEE/WIC/ACM
Int. Joint Conference on Web Intelligence and Intel-
ligent Agent Technology – Volume 02, WI-IAT ’09,
pages 225–232, Washington, DC, USA. IEEE Com-
puter Society.
Lee, K. and Fishwick, P. A. (1996). A methodology for dy-
namic model abstraction. SCS Transactions on Simu-
lation, 13(4):217–229.
LEW Verteilnetz GmbH (2013). LEW Netzdaten. On-
line Resource, last accessed December 2013: http://
www.lew-verteilnetz.de/.
Meseguer, P., Rossi, F., and Schiex, T. (2006). Soft Con-
straints. In Rossi, F., van Beek, P., and Walsh, T.,
editors, Handbook of Constraint Programming, chap-
ter 9. Elsevier.
Pelikan, M. and Goldberg, D. E. (2000). Hierarchical prob-
lem solving by the bayesian optimization algorithm.
In Proc. of the Genetic and Evolutionary Computation
Conference 2000, pages 267–274. Morgan Kaufmann.
Ramchurn, S. D., Vytelingum, P., Rogers, A., and Jennings,
N. R. (2012). Putting the ’smarts’ into the smart grid:
a grand challenge for artificial intelligence. Commun.
ACM, 55(4):86–97.
Santos, C., Zhu, X., and Crowder, H. (2002). A mathemat-
ical optimization approach for resource allocation in
large scale data centers. Technical Report HPL-2002-
64, HP Labs.
Schiendorfer, A., Stegh
¨
ofer, J.-P., Knapp, A., Nafz, F., and
Reif, W. (2013). Constraint relationships for soft con-
straints. In Bramer, M. and Petridis, M., editors, Re-
search and Development in Intelligent Systems XXX.
Springer London.
Stegh
¨
ofer, J.-P., Anders, G., Siefert, F., and Reif, W.
(2013a). A system of systems approach to the evo-
lutionary transformation of power management sys-
tems. In Proceedings of INFORMATIK 2013 – Work-
shop on “Smart Grids”, Lecture Notes in Informatics.
Bonner K
¨
ollen Verlag.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
26

Stegh
¨
ofer, J.-P., Behrmann, P., Anders, G., Siefert, F., and
Reif, W. (2013b). HiSPADA: Self-organising hierar-
chies for large-scale multi-agent systems. In Proceed-
ings of the IARIA International Conference on Auto-
nomic and Autonomous Systems (ICAS) 2013. IARIA.
Van Zandt, T. (1995). Hierarchical computation of the re-
source allocation problem. European Economic Re-
view, 39(3-4):700–708.
Vandewalle, P. (2012). Code sharing is associated with re-
search impact in image processing. Computing in Sci-
ence Engineering, 14(4):42–47.
Yokoo, M., Durfee, E. H., Ishida, T., and Kuwabara, K.
(1998). The distributed constraint satisfaction prob-
lem: Formalization and algorithms. IEEE Transac-
tions on Knowledge and Data Engineering, 10:673–
685.
SynthesisandAbstractionofConstraintModelsforHierarchicalResourceAllocationProblems
27
