
Towards Simulating Heterogeneous Drivers with Cognitive Agents
Arman Noroozian, Koen V. Hindriks and Catholijn M. Jonker
Interactive Intelligence, Delft University of Technology, Delft, The Netherlands
Keywords:
Simulation, Heterogeneity, Mixed Traffic, Cognitive Driver Agent, Scalability.
Abstract:
Every driver behaves differently in traffic. However, when it comes to micro-simulation of drivers with a high
level of detail no framework manages to model the complexities of various driving styles as well as scale
up to larger simulations. We propose a framework of micro-simulation combined with cognitive agents to
facilitate such simulation tasks. Our goal is to (i) model individual drivers, and (ii) use this framework for the
purpose of simulating realistic highway traffic with heterogeneous driving styles. The challenge is therefore to
create a framework that facilitates such complex modeling and supports large scale simulations. We evaluate
the framework from two perspectives. First, the ability to represent, model and simulate dissimilar drivers in
addition to study and compare emerging behavior. Second, the scalability of the framework. We report on our
experiences with the framework, outline several challenges and identify future areas for development.
1 INTRODUCTION
Drivers behave differently as recent studies con-
firm (Ossen and Hoogendoorn, 2011; Hoogendoorn
et al., 2010). While traffic micro-simulation allows us
to study driving behavior in recreated or hypothetical
scenarios in a cost effective way, currently no traffic
simulation framework manages to model such vari-
ations in behavior as well as scale. The ability to
model such varying behavior is of importance because
the particular models that are used impact the expla-
nation/prediction strength of the simulation tools as
demonstrated by Ossen and Hoogendoorn.
In micro-simulation driving behavior is described
in terms of leading vehicle behavior with longitudi-
nal (car-following) models. Some established car-
following models include IDM (Treiber et al., 2000)
and Gipps (Barcel
´
o, 2010, Chap. 8) which respec-
tively describe driver acceleration and speed choices
as a function of attributes relating to the leading ve-
hicle (i.e. distance, relative speed) and a number of
driver related attributes (i.e. desired speed and gap).
Lane-change models extend car-following by describ-
ing behavior in the lateral direction (i.e. changing
lanes) based on the impact on vehicles affected by the
movements. Examples include LMRS (Schakel et al.,
2012) and MOBIL (Kesting et al., 2007). Such micro-
models are characterized by parameters that require
calibration against ground truth data since drivers be-
have differently in different contexts (i.e. per country,
time of day).
Calibration is a complex and time consuming pro-
cess which requires minimization of the measured er-
ror between simulated results and ground truth data
through search algorithms like gradient descent, sim-
ulated annealing, genetic algorithms or probabilistic
methods like Kalman filters (see Treiber and Kesting
(2013, Chap. 16) for an overview of the various meth-
ods). The assumption here is that calibrated parame-
ters apply to all drivers. That is, the heterogeneity
of drivers is not considered in this process. Hetero-
geneity is introduced by adding randomness a poste-
riori. This leads to limitations in explanation/predic-
tion power and the generalization of models to new
traffic contexts (i.e. different highway) or may lead to
observations of unrealistic behavior. For instance in
one empirical study Ossen and Hoogendoorn (2011)
demonstrate that with calibration a model like IDM is
able to model the behavior of only 19% of drivers due
to heterogeneity.
Our goal is to model and study heterogeneous
driving styles and measure the effects of heterogene-
ity in a structured and controllable manner. In par-
ticular we are interested in studying traffic scenar-
ios with a mix of autonomous vehicles and human
drivers. For this purpose we need a framework that
goes beyond the current models that allow for large
numbers of homogenous drivers and at the same time
extends on classic cognitive models (e.g. ACT-R) that
model single drivers with high detail. We require cog-
nitive modeling abilities because we want to study the
impact of cognitive phenomena (i.e. cognitive work-
147
Noroozian A., V. Hindriks K. and M. Jonker C..
Towards Simulating Heterogeneous Drivers with Cognitive Agents.
DOI: 10.5220/0004815601470155
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 147-155
ISBN: 978-989-758-016-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

load). Current simulation frameworks fall short here
because of their tight integration with specific car-
following and lane change models. This limitation not
only applies over the driver population but also over
time as driving style can also vary with time. Model-
ing such heterogeneity is not supported in current ap-
proaches and cognitive frameworks like ACT-R that
have been used so far for micro-level modeling of in-
dividual drivers do not scale enough for our purposes.
To address this issue we have built a simulation
framework that combines cognitive agent modeling
with micro-simulation of traffic. Agents developed by
Agent Programming Languages (APLs) are assigned
to control simulation entities thereby removing tight
integration between model and simulator. The idea is
to provide an API similar to ones used for program-
ming AI in computer games (see Bartish and The-
vathayan (2002); Hindriks et al. (2011)). The abil-
ity to communicate and reason based on various per-
cepts such as brake lights, turn indicators, horns and
the ability to predict ahead of time are added benefits
of using such a framework and desirable for modeling
complex driver behavior (Treiber and Kesting, 2013,
Chap. 12).
We study and illustrate how heterogeneity in lon-
gitudinal driving style affects macroscopic and mi-
croscopic characteristics of traffic using this frame-
work. Note that we limit our models to longitudi-
nal because we are mainly interested in evaluating
our framework rather than the particular driver mod-
els that we use in doing so. This limitation will not
affect our evaluation and we plan to extend this study
with lane-change models in the future. We evaluate
our framework from two perspectives. First, the abil-
ity to model and compare dissimilar driving styles.
Our hypothesis here is that with sufficient heterogene-
ity in longitudinal driving behavior, small effects on
macroscopic characteristics of traffic (i.e. flow and
speed) are observable; at the same time significant ef-
fects on microscopic characteristics (i.e. gap distribu-
tion) should be observed. Second, we evaluate scala-
bility in terms of required resources for an increasing
number of agents. The expectation here is to see a
linear loss of performance with an increasing number
of agents. We require the ability to study small scale
traffic scenarios such as merging at on-ramps, there-
fore we need hundreds of simulated vehicles but not
thousands.
The remainder of this paper is structured as fol-
lows: In Section 2 we present an overview of the re-
lated work. In Section 3 we present our proposed cog-
nitive framework and its evaluation in Section 4. In
Section 5 we outline some of the challenges and dis-
cuss future work. We conclude in Section 6.
2 RELATED WORK
High fidelity traffic simulation tools are based on
incorporating some form of agent-based simulation
with micro-simulation. Some instances are based on
ad-hoc reactive agents that are computationally light
weight but lack communication (Smith et al., 1995;
Ehlert and Rothkrantz, 2001). Because of their sim-
plicity these scale to larger simulations, however, their
driver models do not consider heterogeneity of driv-
ing style. This is likely due to a trade-off between
scalability and realism. Some instances use struc-
tured cognitive agents capable of reasoning however,
the focus has largely been on the strategic aspects
of commuting, i.e. planning activities, when/how to
travel, which routes to take and which transportation
modes to use (Rossetti et al., 2002; Rindsf
¨
user, 2005)
rather than the detailed control of a vehicle. Other in-
stances use cognitive agents to make maneuvering de-
cisions like the decision to overtake other vehicles or
merge (Hidas, 2002; Sukthankar et al., 1998). In (Hi-
das, 2002) the focus is on developing a driver model
for lane changing behavior, however heterogeneity is
not considered. With respect to (Sukthankar et al.,
1998) the focus is on learning to drive and scalability
is not a main concern. For a survey on applications of
agent-based simulation in the traffic domain we refer
the reader to (Cheng, 2010).
Multiple traffic micro-simulation tools have been
developed that provide various levels of programming
control over entities in the simulation. Examples in-
clude DRACULA (Barcel
´
o, 2010, Chap. 8) , TRAN-
SIMS (Nagel and Rickert, 2001), SUMO (Krajzewicz
and Hertkorn, 2002) and MOTUS (Schakel et al.,
2012)
1
. Such tools use hard-coded car-following
models and provide application programming inter-
faces (APIs) that are geared towards studying differ-
ent aspects of traffic (i.e. supply and demand or in-
frastructure control). The micro-models are an inte-
gral part of these tools and modifying them involves
serious restructuring of the code. A common factor in
these tools is that each transportation mode (i.e. pas-
senger car, truck) is assumed to behave according to
a single calibrated model of behavior. That is, a sin-
gle car-following model is used per mode of trans-
port and its calibrated parameters represent the entire
population of drivers. This tight integration makes it
difficult to mix and compare the various driver mod-
els that have been proposed and studied using a single
framework.
Our approach uses BDI (Belief-Desire-Intention)
agents to model individual drivers and their driving
1
For a more comprehensive list of simulators refer
to (Barcel
´
o, 2010).
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
148

styles. BDI agents are based on intentional stance
theory which simplifies the causes for actions to de-
sires (Pokahr et al., 2005). They provide a useful
framework for modeling driving at all levels of deci-
sion making required for the task and can potentially
incorporate additional ranges of factors influencing
driver behavior (Bazzan et al., 1999). By decoupling
the driver models from the simulator we are able to
provide a flexible modeling approach that supports
more complex encoding of behavior and facilitates the
use and comparison of dissimilar driving styles.
Agent-based simulations inherently involve a
trade-off between the encoded detail in the agents
and number of agents that can be simulated (Navarro
et al., 2011). One of the main challenges here is that
the scalability of the approach diminishes as the level
of detail encoded in the models increases from the
strategic to control level. To the best of our knowl-
edge, limited attention has been payed to the scalabil-
ity of BDI agents. For example Wolfe et al. (2008)
investigate the use of BDI agents in air-traffic flow
management and conclude that an overuse of the BDI
paradigm results in scalability limitations and draw
guidelines for the use of the BDI agents.
Other related work investigates the scalability of
the more general concept of Multi-Agent Systems
(MAS). Lee et al. (1998) provide definitions for
the performance and scalability in MAS. Important
performance indicators include throughput, response
time, number of concurrent agents and communica-
tion overhead. Scalability is defined as the degree to
which performance degrades as a result of expand-
ing the number of agents. In addition the topology
of the MAS and the rate of agent arrival/departure
(churn) is also identified as an important scalability
factor (Lee et al., 1998; Turner and Jennings, 2001).
Navarro et al. (2011) propose a hybrid approach for
dynamic adjustment of the level of detail in the sim-
ulation and conclude that the impact on dissimilarity
between a full scale simulation and a simulation that
smartly reduces the level of detail depending on the
context is minimal.
Alternative cognitive modeling approaches in-
clude frameworks such as ACT-R (Salvucci, 2006)
and Soar (Langley et al., 2009). In (Salvucci, 2006)
ACT-R has been used to simulate the maneuvering of
a single driver. Soar has been used for simulating a
fighter pilot in (Langley et al., 2009). One of the main
differences between BDI and cognitive frameworks is
that the latter take biological human constraints into
account to create more plausible human models (i.e.
short/long term memory, learning abilities). The inte-
gration of these constraints is motivated by modeling
the human reasoning process, its sources of knowl-
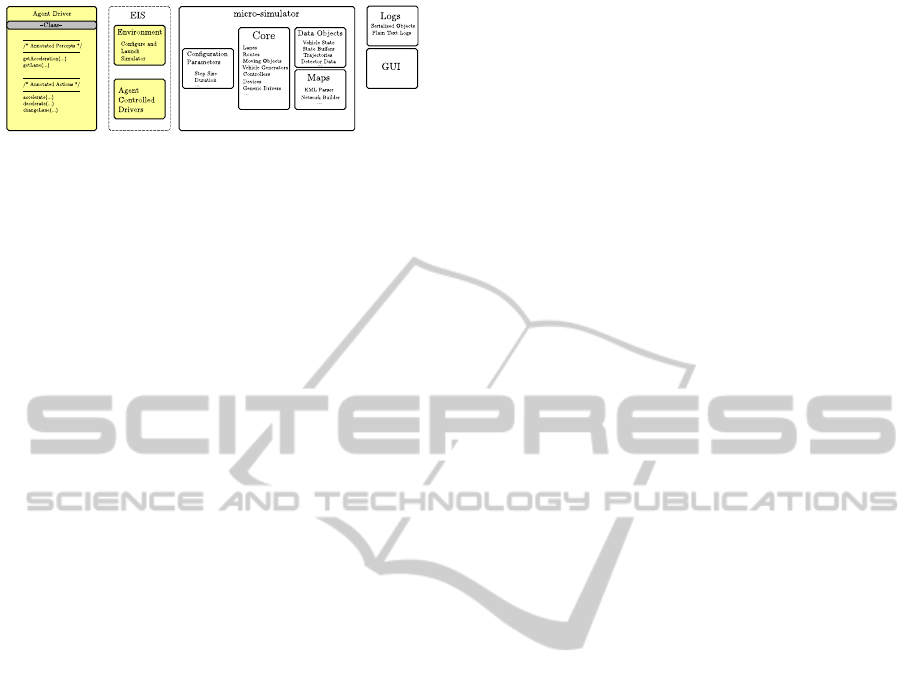
Figure 1: Framework architecture.
edge and the way they are used to reason. Our ap-
proach is focused on general reasoning that does not
necessarily reproduce the exact human reasoning pro-
cess. In terms of scalability cognitive frameworks are
not well suited for large scale simulation. In fact the
scalability of such cognitive frameworks is still an
open problem (Langley et al., 2009). Scalability is
also a concern with BDI agents however to a lesser
extent. BDI agents do not have to deal with complex
characteristics such as short/long term memory which
improves their execution time and hence the scalabil-
ity of the framework as a whole.
3 TRAFFIC SIMULATION
FRAMEWORK
Our review of the related work motivates the need for
a traffic simulation framework based on a flexible and
scalable formalism to model driver heterogeneity. In
this section we present our proposed framework and
its components: jSim, the GOAL agent programming
framework and the Environment Interface connecting
the former two. Figure 1 demonstrates the high level
architecture of our framework.
Our microscopic traffic simulator jSim is a time-
discrete, space-continuous, open-source Java-based
simulator. It is an extended version of MOTUS
(Schakel et al., 2012) which has been modified to pro-
vide necessary percepts and actions to agents for en-
coding driver behavior.
jSim operates with a main loop where each itera-
tion represents the passage of time by one time step
(virtual time). During each time step agents that con-
trol entities within the simulation get the opportunity
to perceive changes since the previous time step and
perform actions within the current time step. The sim-
ulation loop consists of 4 phases: (i) updating the state
of the world, (ii) waiting for agents to act, (iii) exe-
cuting the agent actions and (iv) gathering statistics.
Note that the rendezvous point in phase ii is a design
decision in order to ensure fairness; that all agents get
the chance to perform an action in each cycle. This re-
TowardsSimulatingHeterogeneousDriverswithCognitiveAgents
149
--------
-----------------------
--------------------------
--------
Figure 2: jSim overview and components.
sults in a pseudo-parallel update step in which the up-
dated world state is independent of the order in which
agent actions are executed.
Some simulation entities are controlled by agents
while others may be passive. For example detectors
simply count the number of vehicles passing over a
specific point of the road network. Controllable enti-
ties include drivers controlling the vehicles, on board
units and road side units. The agents controlling them
go through a observe-decide-act cycle. Observation
involves perceiving relevant information from the en-
vironment while decision making involves executing
the agent’s code which in turn will execute some ac-
tions within the environment. Note that due to space
limitation we only give an overview of the driver spe-
cific functionality relevant to longitudinal behavior.
A driver agent can perceive time, speed, acceleration
and current lane. It can also perceive surrounding ve-
hicles within a boxed area, the gap and speed differ-
ence with a leading vehicle (if any). Relevant actions
available to a driver are adjusting the vehicle accel-
eration/deceleration. Vehicle states are updated ac-
cording to kinematic equations of motion once. Fig-
ure ?? gives and overview of the components within
jSim. We have integrated components for importing
road networks.
The second component of our framework is the
GOAL agent programming platform. GOAL agents
encode driver behavior using the GOAL programming
language (Hindriks et al., 2001). GOAL is a plat-
form for implementing Belief-Desire-Intention (BDI)
agents. They have the ability to perceive their envi-
ronment, reason about its state, adopt or drop goals
and decide on what actions to perform.
GOAL is a rule-based logic programming lan-
guage that uses Prolog for representing the beliefs and
goals of an agent. Rules consist of a condition on the
agent’s mental state and are used for deciding what to
do next. Using these rules, an agent derives its choice
of action from its beliefs and goals. There is a one-
to-one mapping between GOAL agents and driver en-
tities in the simulator.
Our motivation for using BDI agents and GOAL in
particular is threefold. First, encoding existing driver
models as BDI agents is natural as such models al-
ready use cognitive notions such as desired speed/gap
which naturally fit the BDI paradigm. Second, BDI
agents support cognitive modeling and allow complex
driver models which use reasoning as part of their de-
liberation. Third, GOAL agents do not have to deal
with the complexities of short/long term memory that
other cognitive frameworks like ACT-R do and there-
fore could potentially produce more scalable agents.
As an independent motivation we also find the traf-
fic domain challenging for improving GOAL and BDI
agents in general.
Note that GOAL supports programming reactive
as well as proactive, cognitive agents. Existing driver
models that consist of a single formula can be im-
plemented as agents that simply react to changes
in the environment. Others can be implemented as
cognitive agents with rule based behavior that inte-
grates declarative goals into the deliberation process.
This type of flexibility has been demonstrated in real
time (Hindriks et al., 2011) and non-real time environ-
ments (Dekker et al., 2012) and facilitates an array of
complex driving styles to be simulated.
The final component of our framework is the En-
vironment Interface. This interface is based on the
Environment Interface Standard (EIS) (Behrens et al.,
2010). It acts as a middle-ware between the environ-
ment and the agent. This middle-ware exposes re-
quired functionality for implementing agents and is
similar to the API exposed in computer games for im-
plementing character specific AI. In addition this in-
terface also allows other APLs to be used in combina-
tion with jSim. Other platforms that provide support
for EIS include JIAC and AGENT FACTORY.
EIS is Java based and provides functionality for
encapsulating and launching virtual environments in
addition to perceiving changes and executing actions
therein. It also facilitates the coupling/decoupling of
entities and their controlling agents. This is achieved
through methods that are used to dynamically couple
and decouple agents with entities. This dynamism not
only facilitates the use of mixed agent types for con-
trolling drivers but also to change and adapt a single
driver’s behavior during a simulation.
4 FRAMEWORK EVALUATION
In this section we are interested in evaluating our
framework from two perspectives. First, the ability to
implement, mix and compare different driver models
as a method for modeling heterogeneity. Second, the
scalability of the framework in terms of the number
of agents in the simulation.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
150
4.1 Mixing Driver Models
Our framework provides a controllable level of het-
erogeneity with the various types of driving styles that
can be used in combination with the frequency by
which they occur in the population of our simulated
drivers. We showcase several experiments and high-
light how our framework facilitates the implementa-
tion, use and comparison of mixed driver models and
their emerging behavior.
Our experiments involve two longitudinal driver
models: (i) IDM (Treiber et al., 2000) and (ii) a sim-
ple cognitive agent (CA) implemented by ourselves.
Note that the framework facilitates the use of any
number/type of model to create heterogeneity and
is not limited to the two types of agents which we
demonstrate here.
We use the calibrated values from (Schakel et al.,
2012) for our IDM agents. The agent implementa-
tion contains a single action rule that uses the model
formula to generate acceleration/deceleration actions.
We can simply replace this single action rule with a
different formula to implement any other longitudinal
driver model without having to rebuild our tool.
Our cognitive agent (CA) is more involved than
the IDM agent. Parts of its implementation are
presented in Figure 3. In contrast to the IDM
agent, the CA agent makes use of cognitive con-
structs (i.e. goals, beliefs) to encode driving behav-
ior. Note the use of such constructs in the agent’s
action rules (Line 7-8). The modules specified on
lines 11 and 27 constitute the agent’s deliberation pro-
cess. The CA agent implements an aggressive style
of driving. That is to say that it will constantly try
to keep a time gap of 2 seconds with the leading ve-
hicle (if any) and that it uses a considerable amount
of acceleration/deceleration in doing so. This consti-
tutes the only parameter of our CA agent (2 second
headway). Figure 3 demonstrates the use of the BDI
paradigm in encoding a particular driving style. BDI
provides a useful and natural formalism for modeling
drivers (Bazzan et al., 1999). While we do not make
use of all available perceptual input to implement our
CA agent, more complex agents can be implemented
using the perceptual information (see Section 3 for
more information on the available perceptual data).
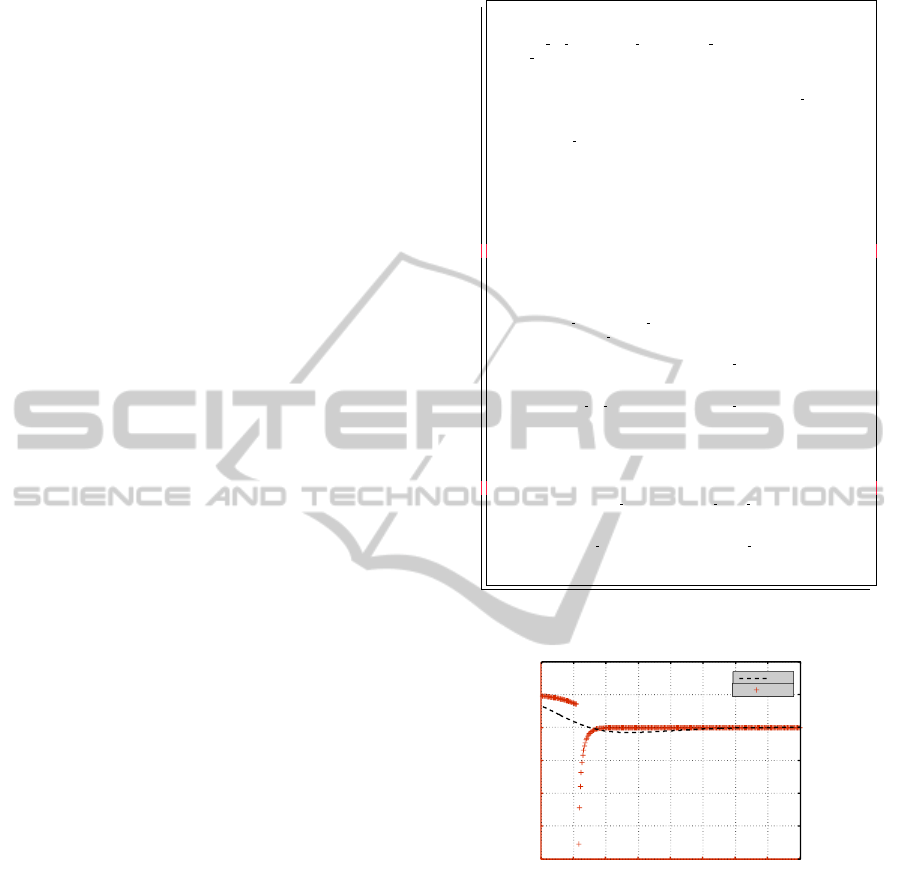
Differences between the CA and IDM agent’s longitu-
dinal driving style are demonstrated in Figure 4. The
plotted acceleration values have been gathered during
the simulation scenario depicted in Figure 5. The CA
agent aggressively fills the gaps while it avoids getting
dangerously close to its leading vehicle. A disconti-
nuity in the acceleration of the CA agent occurs at the
point where the 2 second time gap is violated and the
1 main module{
2 knowledge {
3 getting too close :− time gap( TG ), min timegap( MTG ), TG =< MTG.
4 min timegap( 2.0 ).
5 }
6 program [order=linear] {
7 if a−goal( speed( GS ) ), bel( speed( CS ), GS > CS, max acceleration(
MA ), A is MA ∗ (1 − (CS/GS)∗∗5)) then accelerate( A ).
8 if a−goal( speed( GS ) ), bel( speed( CS ), GS < CS,
max deceleration(MD), D is MD ∗ (1 − (CS/GS)∗∗5)) then
decelerate( D ).
9 if bel( true ) then skip.
10 } }
11 event module {
12 program {
13 % Update Goals based on new beliefs (Drop and Adopt).
14 %−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
15 % Always reconsider current speed.
16 if goal( speed( Y ) ) then drop( speed( Y ) ) .
17 % Reasons for dropping speed synchronization goal:
18 % 1st: Large gap in front ; I am aggressive, close the gap.
19 if bel( time gap( TG ), min timegap( MTG ), TG >= 2 ∗ MTG) then
drop( same speed ).
20 % 2nd: no car in front anymore.
21 if bel( not( blocked(me) ) ) then drop( same speed ).
22 % Reconsider to see if we need to adopt new goals
23 % If getting too close we maintain same speed as car in front.
24 if bel( getting too close ) then adopt( same speed ).
25 if true then setSpeedGoal.
26 } }
27 module setSpeedGoal {
28 program [order=linear] {
29 % either there is a gap to fill or not. set speed goal to lane speed
limit .
30 if not( a−goal( same speed ) ), bel( lane speed limit( SL ) ) then
adopt( speed( SL ) ).
31 % we’re getting too close, adjust and compute lower speed.
32 if a−goal( same speed ), bel( speed( S ), speed delta( DS ), X is S −
DS) then adopt( speed( X ) ).
33 } }
Figure 3: Cognitive driver agent code.
4 6 8 10 12 14 16 18 20
−20
−15
−10
−5
0
5
10
Time (S)
Acceleration CA (m/s
2
)
4 6 8 10 12 14 16 18 20
−20
−15
−10
−5
0
5
10
Acceleration IDM (m/s
2
)
IDM
CA
Figure 4: Agent behavior for gap filling and speed synchro-
nization for scenario in Figure 5.
agent decelerates to stop further violation. The IDM
agent chooses its accelerations smoothly based on the
IDM formula (Schakel et al., 2012).
Given these agents we study the effects of hetero-
geneity on macroscopic and microscopic characteris-
tics of traffic. The following three scenarios are sim-
ulated in our experiments: (i) All drivers use the IDM
model, (ii) all use the CA model (iii) divers use the
IDM or CA model with 50% chance.
We simulate a hypothetical 500 meter highway
section. The density of vehicles on each lane varies.
Density is controlled by the gap at which vehicles
are inserted on the lane. Vehicles enter with a speed
TowardsSimulatingHeterogeneousDriverswithCognitiveAgents
151
0
1
2
3
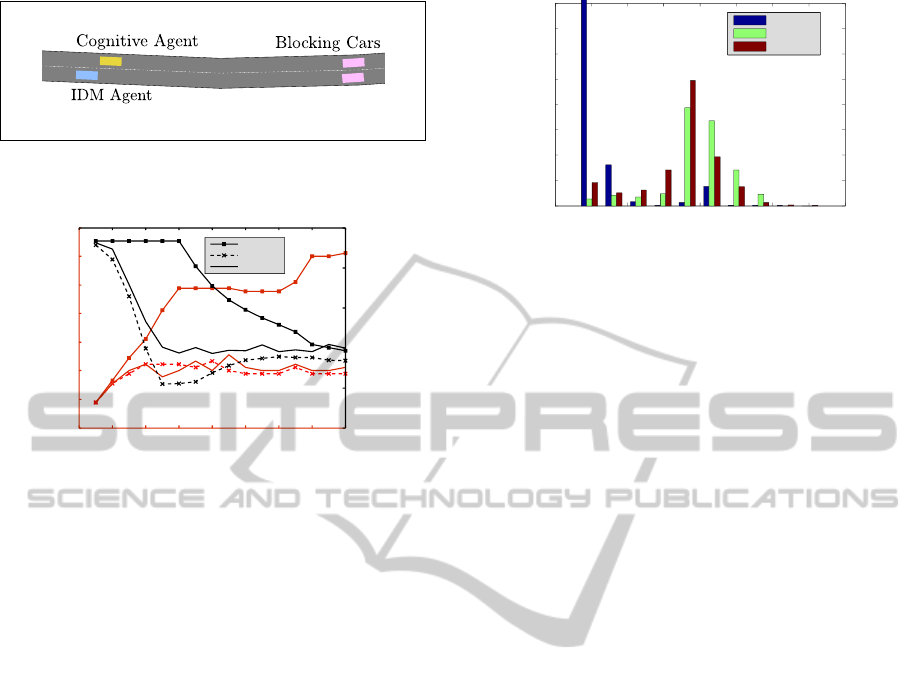
Figure 5: Blocked drivers scenario. Initial time gap of 4
seconds between agents and blocking cars
0 10 20 30 40 50 60 70 80
0
1
2
3
4
5
6
7
Density (Veh/Km)
Flow (Veh/ 5 sec.)
0 10 20 30 40 50 60 70 80
10
15
20
25
30
35
Speed (m/s)
CA
IDM
50−50 Mix
Figure 6: Comparison of Fundamental Diagrams for Cog-
nitive Agent (CA), IDM and 50-50% mix.
that gives them enough time to come to a full stop if
the leading vehicle breaks at maximum deceleration.
Note that vehicles are restricted by and do not change
lane since we are comparing longitudinal driver be-
havior.
Our first experiment demonstrates driver behav-
ior in traffic flow situations before and leading to a
congested traffic state. For this experiment we com-
pare the emerging macro level flow, density and speed
properties of the traffic for the 3 scenarios outlined
above. The relations between these properties are
macroscopic features and are referred to as the fun-
damental diagrams (i.e. flow and speed in relation to
density) (Treiber and Kesting, 2013, Chap. 4). Fig-
ure 6 illustrates the emerging fundamental diagrams.
A detector positioned at 10% of the segment length
was used to measure the flow and speed of vehicles.
These measurements show the effects of heterogene-
ity on macroscopic features of the traffic.
Due to their aggressive driving style CA agents
achieve the highest flow rates (Fig. 6). Aggressive-
ness does not have the same effect on flow when het-
erogeneous traffic is considered. It is the result of CA
agents being restricted by IDM agents. Effectively,
CA agents have a limited maneuvering space between
the lead and following vehicle. Note however, that the
effect of heterogeneous drivers (mix) is more visible
in the speed measurements. This is due to the CA
agents using more acceleration (and higher speeds)
to fill in gaps thereby lifting the average. Note that
this effect is more pronounced in mid range densities
where the differences in driving style are more likely
0 10 20 30 40 50 60 70 80
0
500
1,000
1,500
2,000
2,500
3,000
3,500
12,000
Gap (m)
Times Observed
CA
IDM
50−50 Mix
Figure 7: Histogram of observed vehicle gaps for cognitive
agent (CA), IDM and 50-50% mix of CA/IDM.
to play a significant role.
Our second experiment demonstrates driver be-
havior in congested traffic. Here we repeat the previ-
ous experiment with the addition of one slow moving
vehicle per lane to block the movement of all follow-
ing vehicles and produce artificially congested traf-
fic. For this experiment we demonstrate the effect of
heterogeneity on the distribution of gaps between the
vehicles in the bottom denser lanes. This is a micro-
scopic characteristic of the traffic which is plotted in
Figure 7 as histograms. The figure demonstrates that
CA agents maintain shorter gaps from their leading
vehicles. For the IDM agents the gaps are generally
larger. With heterogeneous driving styles the gaps be-
come relatively smaller in comparison to IDM and the
distribution is skewed towards smaller gaps because
of the CA agent driving style.
These two experiments confirm our hypothesis
with respect to the small effect of heterogeneity on
macroscopic and a larger effect on microscopic char-
acteristics of traffic (see Section 1) and demonstrate
how our framework facilitates the implementation,
use and mixing of multiple driver models as a method
for modeling heterogeneity.
4.2 Scalability
In addition to the use, mixing and comparison of the
diver models we have also evaluated the scalability of
our framework. Our scalability requirements are de-
rived from our goal to study driver behavior in small
sections of highways. Such small sections may con-
tain drivers in the order of 100s. Note that all figures
and results relating to the scalability of the framework
have been obtained on an Intel i7 processor chip with
4GBs of available RAM.
Figure 8 plots the average execution time of an
iteration of the simulation loop. We measure two
quantities. The first is the agent’s reaction window
which is the amount of time the simulation waits for
all agents to perform an action. The second is the du-
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
152

20 40 60 80 100 120 140 160
100
200
300
400
500
600
650
Number of Agents
Time (ms)
Simulation Loop Duration
Agents Reaction Windows
f(x) = 3.22x + 56.37 (R
2
= 0.96)
f(x) = 3.30x + 64.35 (R
2
= 0.94)
Figure 8: Scalability of Framework.
ration of a single iteration of the main loop. Note that
the execution of our agent codes is the main bottle-
neck in the framework. This is not surprising since
we have executed agent codes sequentially and not
in parallel. We observe a linearly increasing trend in
the execution time and therefore a linearly decreasing
trend in the framework scalability as expected.
The step size in the measurements depicted in this
figure is equal to 25 milliseconds. Given this time
step a simulation of 10 seconds with 100 agents, re-
quires approximately 156 seconds to execute. Dou-
bling the step size to 50 ms results in a simulation
of the same duration to require 78 seconds. Us-
ing the linear approximation trend line depicted in
the figure we can draw the following relation: d
r
=
d
s
∆t
× (3.3a + 64.35) × 10
−3
, where d
r
is the real time
duration of the simulation in seconds, d
s
is the dura-
tion of simulation that we want to run in seconds, ∆t is
the simulation step size and a is the number of agents.
This property is known as the real time ratio of the
simulation. This quantity is of practical importance
because it indicates the time required to run a simula-
tion which also impacts the calibration process.
In order to put our scalability results in perspec-
tive we also report on performance results from the
literature. Bartish and Thevathayan (2002) report on
using BDI agents for controlling game characters and
arrive at comparable linear scalability results. Wolfe
et al. (2008) report on a framework for air-traffic con-
trol using BDI agents. The authors identify the exe-
cution properties of the underlying BDI agent imple-
mentation as one of the important sources for the in-
efficiency of their framework. Salvucci (2006) report
on simulating a single driver using the ACT-R cogni-
tive framework. A comprehensive analysis of the real-
time ratio of the parallel TRANSIMS traffic simulator
is also reported in (Nagel and Rickert, 2001). Real-
time ratios between 0.25 and 0.007 (faster than real-
time) have been reported for simulating urban traffic
of the city of Portland.
Whether agent based simulation frameworks are
considered scalable depends on the requirements. In
light of our scalability requirement we can conclude
that the framework performance is acceptable. How-
ever, parallelism seems necessary when considering
that calibration of driver models requires multiple
rounds of simulation per parameter. We believe that
the scalability of MAS and BDI agents in particular
are important open questions. It is important to report
trends rather than qualitative results to enable detailed
analysis and comparison of frameworks.
5 CHALLENGES AND FUTURE
WORK
An important challenge that we have briefly touched
upon is the calibration of heterogeneous models. Be-
cause of the larger number of parameters that need to
be calibrated with heterogeneous models, the process
is more time consuming than the methods described
in Section 1. More efficient calibration methods are
required. One promising area for further research is
modeling driver behavior through learning from avail-
able data. Similar ideas have been explored in (Suk-
thankar et al., 1998) in which learning has been used
for tactical level driving. The advantage here is that
learning can be done offline to create archetypal driv-
ing styles (i.e. aggressive vs safe driver). However, it
is not yet clear how realistic such models are in com-
parison to control theoretic models and how they can
be used for studying real traffic.
Furthermore, scalability of cognitive agents still
remains a challenge (Langley et al., 2009). An as-
pect of our future work is to use GOAL’s ability to
run distributed simulations to achieve better scaling.
Another important aspect with respect to BDI agents
is to improve the efficiency of the reasoning process
of agents. Solutions like dynamic adjustment of the
simulation fidelity proposed in (Navarro et al., 2011)
also present promising research.
We are planning to extend this study with driver
behavior in both longitudinal and lateral directions.
We also plan to use the agent communication abilities
to research distributed coordination and car platoon-
ing which impact road throughput and safety.
6 CONCLUSIONS
We have outlined our initial steps towards designing
a cognitive framework for modeling heterogeneous
driving styles using BDI agents and micro-simulation
of traffic. The goal of the framework is to facilitate a
TowardsSimulatingHeterogeneousDriverswithCognitiveAgents
153

heterogeneous modeling paradigm and to implement
and compare different driver models in highway traf-
fic. We have evaluated our framework from two per-
spectives: (i) Its ability to meet this goal, (ii) the scala-
bility of the framework. Our evaluation demonstrates
that the our framework is quite flexible in modeling
complex heterogeneous driving behavior. The main
advantage of our framework is its ability to mix mul-
tiple driver models rather than using a single model
for an entire population of drivers as is done in cur-
rent traffic simulation frameworks. A second advan-
tage of our proposed framework is that in compari-
son with solutions like micro-simulation with reactive
agents, the framework’s use of BDI agents makes it
better suited for modeling the cognitive complexities
of driving behavior. While less scalable than reac-
tive agents, our BDI approach easily scales to 100s
of agents which makes them more scalable than other
cognitive frameworks such as SOAR and ACT-R. In
terms of scalability the framework shows promising
results towards our requirements. The scalability of
agents and their improvement remains an important
avenue of research.
REFERENCES
Barcel
´
o, J., editor (2010). Fundamentals of Traffic Simula-
tion, volume 145 of Operations Research & Manage-
ment Science. Springer.
Bartish, A. and Thevathayan, C. (2002). BDI agents for
game development. In Proc. AAMAS ’02, part 2, page
668. ACM.
Bazzan, A. L. C., Wahle, J., and Kl
¨
ugl, F. (1999). Agents in
traffic modelling - from reactive to social behaviour.
KI-99: Advances in Artificial Intelligence, pages 303–
306.
Behrens, T. M., Hindriks, K. V., and Dix, J. (2010). To-
wards an environment interface standard for agent
platforms. Annals of Mathematics and Artificial In-
telligence, 61(4):261–295.
Cheng, H. H. (2010). A Review of the Applications of
Agent Technology in Traffic and Transportation Sys-
tems. IEEE Transactions on Intelligent Transporta-
tion Systems, 11(2):485–497.
Dekker, M., Hameete, P., and Hegemans, M. (2012). Hac-
tarV2: an agent team strategy based on implicit coor-
dination. Programming Multi-Agent Systems , LNCS,
7217:173–184.
Ehlert, P. and Rothkrantz, L. (2001). Microscopic traffic
simulation with reactive driving agents. In ITSC. 2001
IEEE Intelligent Transportation Systems., pages 860–
865. IEEE.
Hidas, P. (2002). Modelling lane changing and merging
in microscopic traffic simulation. Transportation Re-
search Part C: Emerging Technologies, 10(5-6):351–
371.
Hindriks, K. V., de Boer, F. S., van der Hoek, W., and
Meyer, J.-J. C. (2001). Agent programming with
declarative goals. Intelligent Agents VII Agent The-
ories Architectures and Languages, LNCS, 1986:228–
243.
Hindriks, K. V., van Riemsdijk, B., Behrens, T., Korstanje,
R., Kraayenbrink, N., Pasman, W., and de Rijk, L.
(2011). Unreal goal bots. Agents for Games and Sim-
ulations II, LNCS, 6525:1–18.
Hoogendoorn, R., Hoogendoorn, S. P., Brookhuis, K., and
Daamen, W. (2010). Mental Workload, Longitudi-
nal Driving Behavior, and Adequacy of Car-Following
Models ... Transportation Research Record, 2188:64–
73.
Kesting, A., Treiber, M., and Helbing, D. (2007).
General Lane-Changing Model MOBIL for Car-
Following Models. Transportation Research Record,
1999(1):86–94.
Krajzewicz, D. and Hertkorn, G. (2002). Sumo (simulation
of urban mobility). Proc. of the 4th Middle East Sym-
posium on Simulation and Modelling, pages 183—-
187.
Langley, P., Laird, J. E., and Rogers, S. (2009). Cognitive
architectures: Research issues and challenges. Cogni-
tive Systems Research, 10(2):141–160.
Lee, L., Nwana, H., Ndumu, D., and Wilde, P. D. (1998).
The stability, scalability and performance of multi-
agent systems. BT Technology Journal, 16(3):94–103.
Nagel, K. and Rickert, M. (2001). Parallel implementation
of the TRANSIMS micro-simulation. Parallel Com-
puting, 27(12):1611–1639.
Navarro, L., Flacher, F., and Corruble, V. (2011). Dynamic
level of detail for large scale agent-based urban simu-
lations. Proc. AAMAS, 2:701–708.
Ossen, S. and Hoogendoorn, S. P. (2011). Heterogeneity in
car-following behavior: Theory and empirics. Trans-
portation Research Part C: Emerging Technologies,
19(2):182–195.
Pokahr, A., Braubach, L., and Lamersdorf, W. (2005).
Jadex: A BDI reasoning engine. Multi-Agent Pro-
gramming, pages 149–174.
Rindsf
¨
user, G. (2005). Multi Agent System Simulation for
the Generation of Individual Activity Programs. Ap-
plications of Agent Technology in Traffic and Trans-
portation, pages 165–180.
Rossetti, R. J., Bordini, R. H., Bazzan, A. L., Bampi, S.,
Liu, R., and Vliet, D. V. (2002). Using BDI agents
to improve driver modelling in a commuter scenario.
Transportation Research Part C: Emerging Technolo-
gies, 10(5-6):373–398.
Salvucci, D. D. (2006). Modeling Driver Behavior in a Cog-
nitive Architecture. Human Factors and Ergonomics
Society, 48(2):362–380.
Schakel, W. J., Knoop, V. L., and van Arem, B. (2012).
Integrated Lane Change Model with Relaxation and
Synchronization. Transportation Research Record,
2316:47–57.
Smith, L., Beckman, R., and Baggerly, K. (1995). TRAN-
SIMS: Transportation analysis and simulation system.
Technical report, Los Alamos National Lab (United
States).
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
154

Sukthankar, R., Baluja, S., and Hancock, J. (1998). Mul-
tiple Adaptive Agents for Tactical Driving. Applied
Intelligence, 9(1):7–23.
Treiber, M., Hennecke, A., and Helbing, D. (2000). Con-
gested Traffic States in Empirical Observations and
Microscopic Simulations. Physical Review E, pages
1805–1824.
Treiber, M. and Kesting, A. (2013). Traffic Flow Dynamics
- Data, Models and Simulation. Springer.
Turner, P. and Jennings, N. (2001). Improving the scalabil-
ity of multi-agent systems. Infrastructure for Agents,
Multi-Agent Systems, and Scalable Multi-Agent Sys-
tems, LNCS, 1887:246–262.
Wolfe, S. R., Sierhuis, M., and Jarvis, P. A. (2008). To BDI,
or not to BDI: design choices in an agent-based traffic
flow management simulation. In Proc. SpringSim ’08,
pages 63–70.
TowardsSimulatingHeterogeneousDriverswithCognitiveAgents
155
