
Design of Material-integrated Distributed Data Processing Platforms
with Mobile Multi-agent Systems in Heterogeneous Networks
Stefan Bosse
University of Bremen, Department of Mathematics and Computer Science, ISIS Sensorial Materials Scientific Centre,
Bremen, Germany
Keywords:
Multi-agent Platform, Sensor Network, Mobile Agent, Heterogeneous Networks, Embedded Systems.
Abstract:
An agent processing platform suitable for distributed computing in sensor networks consisting of low-resource
(e.g., material-integrated) nodes is presented, providing a unique distributed programming model and en-
hanced robustness of the entire heterogeneous environment in the presence of node, sensor, link, data pro-
cessing, and communication failures. In this work multi-agent systems with mobile activity-based agents are
used for sensor data processing in unreliable mesh-like networks of nodes, consisting of a single microchip
with limited low computational resources. The agent behaviour, interaction, and mobility (between nodes)
can be efficiently integrated on the microchip using a configurable pipelined multi-process architecture based
on Petri-Nets. Additionally, software implementations and simulation models with equal functional behaviour
can be derived from the same source model. Hardware and software platforms can be directly connected in
heterogeneous networks. Agent interaction and communication is provided by a simple tuple-space database
and signals providing remote inter-node level communication and interaction. A reconfiguration mechanism
of the agent processing system offers activity graph changes at run-time.
1 INTRODUCTION
Trends are recently emerging in engineering and
micro-system applications such as the development of
sensorial materials (Lang, 2011) show a growing de-
mand for distributed autonomous sensor networks of
miniaturized low-power smart sensors embedded in
technical structures (Pantke, 2011). These sensor net-
works are used for sensorial perception or structural
health monitoring, employed, for example in Cyber-
Physical-Systems (CPS), and perform the monitoring
and control of complex physical processes using ap-
plications running on dedicated execution platforms
in a resource-constrained manner under real-time pro-
cessing and technical failure constraints.
To reduce the impact of such embedded senso-
rial systems on mechanical structure properties, sin-
gle microchip sensor nodes (in mm
3
range) are pre-
ferred. Real-time constraints require parallel data pro-
cessing inadequately provided by software based sys-
tems.
Multi-agent systems can be used for a decentral-
ized and self-organizing approach of data processing
in a distributed system like a sensor network (Gui-
jarro, 2008), enabling information extraction, for ex-
ample based on pattern recognition (Zhao, 2008), and
by decomposing complextasks in simpler cooperative
agents.
Hardware (microchip level) designs have advan-
tages compared with microcontroller approaches con-
cerning power consumption, performance, and chip
resources by exploiting parallel data processing (cov-
ered by the agent model) and enhanced resource shar-
ing (Bosse, 2011), which will be applied in this work.
Usually sensor networks are a part of and con-
nected to a larger heterogeneous computational net-
work (Guijarro, 2008). Employing of agents can over-
come interface barriers arising between platforms dif-
fering considerably in computational and communi-
cation capabilities. That’s why agent specification
models and languages must be independent of the un-
derlying run-time platform. On the other hand, some
level of resource and processing control must be avail-
able to support the efficient design of hardware plat-
forms.
Hardware implementations of multi-agent sys-
tems are still limited to single or a few and im-
mobile agents (Meng, 2005, Naji, 2004), and were
originally proposed for low level tasks, for example
in (Ebrahimi, 2011) using agents to negotiate net-
69
Bosse S..
Design of Material-integrated Distributed Data Processing Platforms with Mobile Multi-agent Systems in Heterogeneous Networks.
DOI: 10.5220/0004817500690080
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 69-80
ISBN: 978-989-758-016-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

work resources. Coarse grained reconfiguration is
enabled by using FPGA technologies (Meng, 2005).
Most current work uses hardware-software co-design
methodologies and code generators, like in (Jamont,
2008). This work provides more fine-grained agent
reconfiguration and true agent mobility without rely-
ing on a specific technology and employs high-level
synthesis to create standalone hardware and software
platforms delivering the same functional and reactive
behaviour.
There is related work concerning agent program-
ming languages and processing architectures, like
APRIL (McCabe, 1995) providing tuple-space like
agent communication, and widely used FIPA ACL,
and KQGML (Kone, 2000) focusing on high-level
knowledge representations and exchange by speech
acts, or model-driven engineering (e.g. INGENIAS,
Sansores, 2008). But the above required resource and
processing control is missing, which is addressed in
this work.
There are actually four major issues related to
the scaling of traditional software-based multi-agents
systems to the hardware level and their design:
• limited static processing, storage,and communica-
tion resources, real-time processing,
• unreliable communication,
• suitable simplified agent-oriented programming
models and processing architectures qualified
for hardware designs with finite state machines
(FSM) and resource sharing for parallel agent ex-
ecution,
• and appropriate high-level design tools.
Traditionally agent programs are interpreted, leading
to a significant decrease in performance. In the ap-
proach presented here, the agent processing is directly
implemented in standalone hardware nodes without
intermediate processing levels and without the neces-
sity of an operating system.
This work introduces some novelties compared to
other data processing and agent platform approaches:
• One common agent behaviour model, which is
implementable on different processing platforms
(hardware, software, simulation).
• Agent mobility crossing different platforms in
mesh-like networks and agent interaction by us-
ing tuple-space databases and global signal prop-
agation aid solving data distribution and synchro-
nization issues in the design of distributed sensor
networks.
• Support for heterogeneous networks and plat-
forms covered by one design and synthesis flow
including functional behavioural simulation.
• A token-based pipelined multi-process agent pro-
cessing architecture suitable for hardware plat-
forms with Register-Transfer Level Logic offering
optimized computational resources and speed.
• A Petri-Net representation is used to derive a
specification of the hardware process and commu-
nication network, and performing advanced anal-
ysis like deadlock detection. Timed Petri-Nets can
be used to calculate computational time bounds to
support real-time processing.
The next sections introduce the activity based agent
processing model, available mobility and interaction,
and the proposed agent platform architecture related
to the programming model. Finally, a case study
shows the suitability of the proposed design approach.
2 STATE-BASED MOBILE
AGENTS
The implementation of mobile multi-agent systems
for resource constrained embedded systems with a
particular focus on microchip level is a complex
design challenge. High-level agent programming
and behaviour modelling languages can aid to solve
this design issue. To carry out multi-agent sys-
tems on hardware platforms, the activity-based agent-
orientated programming language AAPL was de-
signed. Though the imperative programming model
is quite simple and closer to a traditional PL it can
be used as a common source and intermediate repre-
sentation for different agent processing platform im-
plementations (hardware,software, simulation) by us-
ing a high-level synthesis approach, shown in Figure
1. Commonly used agent behaviour models based on
PRS/ BDI architectures with a declarative paradigm
(2APL, AgentSpeak/Jason), communication models
(e.g. FIPA ACL, KQML), and adaptive agent models
can be implemented with AAPL providing primitives
for the representation of beliefs or plans (discussed
later). Agent mobility, interaction, and replication in-
cluding inheritance are central multi-agent-orientated
behaviours provided by AAPL.
Definition: There is a multi-agent system (MAS) con-
sisting of a set of individual agents {A
1
,A
2
,..}. There
is a set of different agent behaviours, called classes
C={AC
1
,AC
2
,..}. An agent belongs to one class.In
a specific situation an agent A
i
is bound to and pro-
cessed on a network node N
m,n
(e.g. microchip, com-
puter, virtual simulation node) at a unique spatial lo-
cation (m,n). There is a set of different nodes N={N
1
,
N
2
,..} arranged in a mesh-like network with peer-to-
peer neighbour connectivity (e.g. two-dimensional
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
70
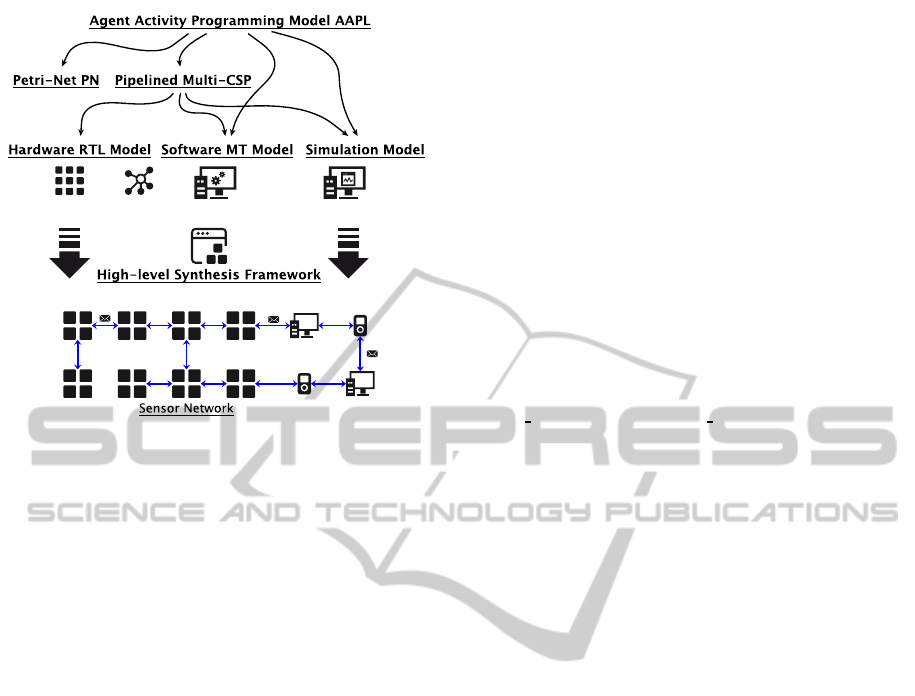
Figure 1: From AAPL level to heterogeneous distributed
networks (RTL: Register-Transfer Level, MT: Multi-
Threading, CSP: Communicating Sequential Processes.
grid). Each node is capable to process a number of
agents n
i
(AC
i
) belonging to one agent behaviour class
AC
i
, and supporting at least a subset of C’⊆ C. An
agent (or at least its state) can migrate to a neighbour
node where it continues working.
2.1 AAPL Programming Model
The agent behaviour is partitioned and modelled with
an activity graph, with activities representing the con-
trol state of the agent reasoning engine, and con-
ditional transitions connecting and enabling activi-
ties,. Activities provide a procedural agent process-
ing by sequential execution of imperative data pro-
cessing and control statements. The activity-graph
based agent model is attractive due to the proxim-
ity to the finite-state machine model, which simplifies
the hardware implementation.An activity is activated
by a transition depending on the evaluation of (pri-
vate) agent data (conditional transition) related to a
part of the agents belief in terms of BDI architectures,
or using unconditional transitions (providing sequen-
tial composition), shown in Figure 2. An agent be-
longs to a specific parameterizable agent class AC ,
specifying local agent data (only visible for the agent
itself), types, signals, activities, signal handlers, and
transitions.
Plans are related to AAPL activities and transitions
close to conditional triggering of plans. Definition
1 summarizes the available language statements.
Instantiation. New agents of a specific class can
be created at runtime by agents using the
new
Agent Class Definition
agent
class
(
arguments
)=
definitions
end;
Activity Definition
activity
name =
statements
end;
Data Statements
var x,y,z:
type
; var* a,b,c:
type
;
x :=
ε
(
variable
,
value
,
constant
);
Conditional Statements
if
cond
then
statements
else
statements
end;
case
ε
of
| v1
-
> statements |
.. end;
Loop Statements
for i :=
range
do
statements
end;
while
cond
do
statements
end;
Transition Network Definition
transitions =
transitions
end;
a1
-
> a2
:
cond
;
Tuple Database Statements
out(
v1
,
v2
,..); .. exist?(
v1
,
?
,..)..
in(
v1
,
x1
?,
v2
,
x2
?,..); rd(
v1
,
x1
?,
v2
,
x2
?,..);
try in(
timeout
,
v1
,..); try rd(
timeout
,
v1
,..);
mark(
timeout
,
v1
,
v2
,..); rm(
v1
,?,..);
Signals
signal
S
:
datatype
;
handler
S
(
x
) =
statements
end;
send(ID,
S
,v); reply(S,v);
broadcast(AC,DX,DY,S,v);
timer+(
timeout
,
S
);timer-(
S
); sleep; wakeup;
Exceptions
exception
E
; raise E;
try
statements
except
E
-
> statements
end;
Mobility, Creation, and Replication
moveto(
direction
);
.. link?(
direction
) ..
id
:= new
class
(
arguments
);
id
:= fork(
arguments
);
kill(
id
);
Transitional Reconfiguration
transition+(
a1
,
a2
,
cond
);
transition*(
a1
,
a2
,
cond
);
transition-(
a1
,
a2
);
Definition 1: Summary of the AAPL Language (..x.. means
x is part of an expression ε, and ; terminates procedural
statements).
AC(v1,v2,..)
statement returning a node unique
agent identifier. An agent can create multiple liv-
ing copies of itself with a fork mechanism, creat-
ing child agents of the same class with inherited data
and control state but with different parameter initial-
ization,done by using the
fork(v1,v2,..)
state-
ment.Agents can be destroyed by using the
kill(ID)
statement.
Each agent has private data (body vari-
ables),defined by the
var
and
var*
state-
ments.Variables in the latter statement will not
be inherited or migrated! Agent body variables in
conjunction with transition conditions represent the
mobile data part of the agents beliefs database.
DesignofMaterial-integratedDistributedDataProcessingPlatformswithMobileMulti-agentSystemsinHeterogeneous
Networks
71

Figure 2: Agent behaviour programming level with activities and transitions (AAPL, left); agent class model and activity-
transition graphs (middle); agent instantiation, processing, and agent interaction on the network node level (right).
Statements inside an activity are processed se-
quentially and consist of data assignments (
x:=
ε) op-
erating on agent’s private data, control flow state-
ments (conditional branches and loops), and special
agent control and interaction statements.
Agent interaction and synchronization is pro-
vided by a tuple-space database server available on
each node (based on McCabe, 1995). An agent
can store an n-dimensional data tuple (v1,v2,..) in
the database by using the
out(v1,v2,..)
state-
ment(commonly the first value is treated as a key).
A data tuple can be removed or read from the
database by using the
in(v1,p2?,v3,..)
or
rd(v1,p2?,v3,..)
statements with a pattern tem-
plate based on a set of formal (variable,
?
) and ac-
tual (constant) parameters. These operations block
the agent processing until a matching tuple was
found/stored in the database. These simple operations
solve the mutual exclusion problem in concurrent sys-
tems easily. Only agents processed on the same net-
work node can exchange data in this way. Simplified
the expression of beliefs of agents is strongly based
on AAPL tuple database model. Tuple values have
their origin in environmental perception and process-
ing bound to a specific node location.
The existence of a tuple can be checked by using
the
exist?
function or with atomic test-and-read be-
haviour using the
try in/rd
functions. A tuple with
a limited lifetime (a marking) can be stored in the
database by using the
mark
statement. Tuples with
exhausted lifetime are removed automatically (by a
garbage collector). Tuples matching a specific pattern
can be removed with the
rm
statement.
Remote interaction between agents is provided
by signals carrying optional parameters (they can be
used locally, too). A signal can be raised by an agent
using the
send(ID,S,V)
statement specifying the ID
of the target agent, the signal name S, and an optional
argument value V propagated with the signal. The re-
ceiving agent must provide a signal handler (like an
activity) to handle signals asynchronously. Alterna-
tively, a signal can be sent to a group of agents belong-
ing to the same class AC within a bounded region us-
ing the
broadcast(AC,DX,DY,S,V)
statement. Sig-
nals implement remote procedure calls. Within a sig-
nal handler a reply can be sent back to the initial
sender by using the
reply(S,V)
statement.
Timers can be installed for temporal agent control
using (private) signal handlers, too. Agent processing
can be suspended with the
sleep
and resumed with
the
wakeup
statements.
Migration of agents (preserving the local data and
processing state) to a neighbour node is performed
by using the
moveto(DIR)
statement, assuming the
arrangement of network nodes in a mesh- or cube-
like network. To test if a neighbour node is reachable
(testing connection liveliness), the
link?(DIR)
state-
ment returning a Boolean result can be used.
Reconfiguration. Agents are capable to change
their transitional network (initially specified in
the transition section) by changing, deleting,
or adding (conditional) transitions using the
transition
⊲⊳
(S1,S2,cond)
statements (with
⊲⊳=’+’: add, ’-’: remove, and ’*’: change transition).
This behaviour allows the modification of the activity
graph, i. e., based on learning or environmental
changes, which can be inherited by child agents.
2.2 Agent Communication
Agent communication can be achieved basically by
three different methods: 1. signal propagation (sim-
ilar to commitment messages in AGENT0, Shoham,
1991), 2. tuple database exchange, and 3. by us-
ing agents with a composition of methods 1 & 2.
These basic methods can be used to realize com-
mon higher-level agent communication languages
like ACL or KQML (tuple patterns correspond to
message content entries). Signal propagation im-
plements light-weighted asynchronous peer-to-peer
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
72

remote-procedure calls, executed on target agents
with appropriate signal handlers, which must not nec-
essarily belong to the same agent class, whereas pat-
tern matching based tuple database access can be per-
formed by any group of agents having a common un-
derstanding of the meaning of data and which are ac-
tually processed on the same platform node.
For example, a simple FIPA ACL based request
from agent A (initiator) to B (participant), which ask
for a database tuple on B can be created with the
following AAPL code pattern using signals:
FIPA ACL: (request :sender IDA
:receiver IDB :content (p ?) :ontology TS2)
AAPL:
signal REQ1,REQ2,INFR,FAIL;
-- Agent A --
var pv,ps;
handler INFR(v) = pv:=v; ps:=true; wakeup ..
handler FAIL = ps:=false; wakeup ..
function request(AID,p) =
send(AID,REQ1,p); timer+(100,FAIL);
sleep;
if ps then return pv else raise FAILED ..
-- Agent B --
handler REQ1(arg) =
var v;
if exist?(p,?) then
in(p,?v); reply(INFR,v)
else reply(FAIL) ...
3 AGENT PLATFORM
SYNTHESIS
The AAPL model is a common source for the imple-
mentation of agent processing on hardware, software,
and simulation processing platforms. A database
driven high-level synthesis approach (Bosse, 2013)
is used to map the agent behaviour to these different
platforms. The agent processing architecture required
on each network node must implement different agent
classes and must be scalable to the microchip level to
enable material-integrated embedded system design,
which represents a central design issue, further fo-
cussing on parallel agent processing and optimized
resource sharing.
3.1 Hardware Platform
This microchip-levelprocessing platform implements
the agent behaviour with reconfigurable pipelined
communicating processes (PCSP) related to the Com-
municating SequentialProcess model (CSP) proposed
by Hoare (1985). The activities and transitions of the
AAPL programming model are merged in a first inter-
mediate representation by using state-transition Petri
Nets (PN), shown in Figure 3. This PN representation
allows the following CSP derivation specifying the
process and communication network, and advanced
analysis like deadlock detection. Timed Petri-Nets
can be used to calculate computational time bounds
to support real-time processing.
Keeping the PN representation in mind,the set of
activities {A
i
} is mapped on a set of sequential pro-
cesses {P
i
} executed concurrently. Each subset of
transitions {T
i, j
} activating one common activity pro-
cess P
j
is mapped on a synchronous N:1 queue Q
j
providing inter-activity-process communication, and
the computational part for transitions embedded in
all contributing processes {P
i
}, shown in Fig. 3.
Changes (reconfiguration) of the transition network at
run-time are supported by transition path selectors.
Each sequential process is mapped (by synthe-
sis) on a finite-state machine and a datapath using
a register-transfer architecture (RTL) with mutual ex-
clusive guarded access of shared objects, all imple-
mented in hardware.
Agents are represented by tokens (natural num-
bers equal to the agent identifier, unique at node
level), which are transferred by the queues between
activity processes depending on the specified tran-
sition conditions. This multi-process model is di-
rectly mappable to register-transfer level RTL hard-
ware. Each process P
i
is mapped on a finite state
machine FSM
i
controlling process execution and a
register-transfer data path. Local agent data is stored
in a region of a memory module assigned to each in-
dividual agent. There is only one incoming transition
queue for each process consuming tokens, perform-
ing processing, and finally passing tokens to outgoing
queues, which can depend on conditional expressions.
There are computational and IO/event-based activity
statements. The latter ones can block the agent pro-
cessing until an event occurs (for example, the avail-
ability of a data tuple in the database). Blocking state-
ments {s
j,i
} of an activity A
i
are assigned to sepa-
rate intermediate IO processes {P
i, j
} handling only
IO events or additional post computations, as shown
on the bottom of Fig. 3. Agents in different activ-
ity states can be processed concurrently. Thus, activ-
ity processes that are shared by several agents may
not block. To prevent blocking of IO processes, not-
ready processes pass the agent token back to the input
queue. An IO process either processes unprocessed
agent tokens or waits for the happening of events,
controlled by the agent manager.
This pipeline architecture offers advanced re-
source sharing and parallelized agent processing with
DesignofMaterial-integratedDistributedDataProcessingPlatformswithMobileMulti-agentSystemsinHeterogeneous
Networks
73

Figure 3: Pipelined Communicating Sequential Process Architecture derived from a Petri-Net specification and relationship
to the activity graph. Signals ar handled asynchronously.
only one activity process chain implementation re-
quired for each agent class. The hardware resource
requirement (digital logic) is divided into a control
and a data part. The control part is proportional to
the number of supported different agent classes. The
data part depends on the maximal number of agents
executed by the platform and the storage requirement
for each agent.
3.2 Software Platform
There are two different architectures for the imple-
mentation of the agent processing on programmable
platforms: 1. by using the already introduced PCSP
architecture, or 2. by using a direct procedural com-
position of the activity graph and its transitions. In the
first case, the activity processes are implemented with
light weighted processes (threads) and queues, pro-
viding token based agent processing. In the second
case, each agent is assigned to and processed by one
thread created at run-time. Activities are one-to-one
mapped on procedures called by a transition sched-
uler (as in the simulation platform case). Blocking
of agent processing is handled by the thread imple-
mentation itself. In any case further software modules
implement the agent manager, tuple space databases,
and networking. A software platform can be directly
connected to hardware nodes and vice versa.
3.3 Simulation Platform
In addition to real hardware and software imple-
mented agent processing platforms there is the capa-
bility of the simulation of the agent behaviour, mobil-
ity, and interaction on a functional level.The SeSAm
simulation framework (Kl¨ugel, 2009) offers a plat-
form for the modelling, simulation, and visualization
of mobile multi-agent systems employed in a two-
dimensional world. The behaviours of agents are
modelled with activity graphs (specifying the agent
reasoning machine) close to the AAPL model. Ac-
tivity transitions depend on the evaluation of condi-
tional expressions using agent variables. Agent vari-
ables can have a private or global (shared) scope.
Basically SeSAm agent interaction is performed by
modification and access of shared variables and re-
sources (static agents). In addition to the agent rea-
soning specification there are global visible feature
packages that define variables and function operat-
ing on these variables. Features can be added to each
agent class. Agents can change their position in the
two-dimensional world map enabling mobility, and
new agents can be created at run-time by other agents.
The SeSAm framework was chosen due to the activity-
based agent behaviour and the data model which can
be immediately synthesized from the common AAPL
source and can be imported by the simulator from a
text based file stored in XML format. This model ex-
change feature allows the tight coupling of the simu-
lator to the synthesis framework.
In principle, AAPL activity graphs can be directly
mapped on the SeSAm agent reasoning model. But
there are limitations which inhibit the direct map-
ping. First of all, AAPL activities (IO/event-based)
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
74

Figure 4: Simulation Model used in the SeSAm MAS Simulator.
can block (suspend) the agent processing until an
event occurs. Blocking agent behaviour is not pro-
vided directly by SeSAm. Secondly, the transition
network can change during run-time. Finally, the
handling of concurrent asynchronous signals used in
AAPL for inter-agent communication cannot be estab-
lished with the generic activity processing in SeSAm
(the provided exception handling is only used for ex-
ceptional termination of agents).
For this reason, the agent activity transitions in-
cluding the dynamic transition network capability are
managed by a special transition scheduler, shown in
Figure 4. This transition scheduler handles signals
and timers, too, which are processed prioritized and
passed to the signal scheduler. Each agent activity
is activated by the transition scheduler. After a spe-
cific activity was processed, the transition scheduler
is activated and entered again. An AAPL activity
can be split in computational and IO/event-based sub-
activities in the presence of blocking statements (e.g.
in
and
rd
tuple space interaction).
There is a special node agent implementing the tu-
ple database with lists (partitioned to different spaces
for each dimension), and managing agents and sig-
nals actually bound to this particular node. Concur-
rent manipulation of lists is non-atomic operations in
SeSAm, and hence requires mutual exclusion.
The AAPL mobility, interaction, configuration,
and replication statements are implemented by feature
packages.
3.4 Synthesis
The database driven synthesis flow (details in Bosse,
2013) consists of an AAPL front end, the core com-
piler, and several backends targeting different plat-
forms. The AAPL program is parsed and mapped on
an abstract syntax tree (AST). The first compiler stage
analyzes, checks, and optimizes the agent specifica-
tion AST. The second stage is split in three parts: an
activity to process mapper, a transition to queue map-
per, a transition (pipelined processing architecture)
network builder, and a message generator supporting
agent and signal migration. Different outputs can be
produced: a hardware description enabling SoC syn-
thesis using the ConPro high-level synthesis frame-
work (details in Bosse, 2011), a software description
(C) which can be embedded in application programs,
and the SeSAm simulation model (XML). The ConPro
programming model reflects an extended CSP with
atomic guarded actions for the access of shared re-
sources. Each process is implemented with an FSM
and an RT datapath.
All implementation models (HW/SW/SIM) pro-
vide equal functional behaviour, and only differ in
their timing, resource requirements, and execution en-
vironments. Some more implementation and synthe-
sis details follow.
Agent Manager
The agent manager provides a node level interface
for agents, and it is responsible for the creation, con-
trol (including signals, events, and transition network
configuration), and migration of agents with network
connectivity, implementing a main part of an operat-
ing system. The agent manager controls the tuple-
space database server and signals events required for
IO/event-based activity processes.
The agent manager uses agent tables and caches to
store information about created, migrated, and passed
through agents (req., for ex., for signal propagation).
DesignofMaterial-integratedDistributedDataProcessingPlatformswithMobileMulti-agentSystemsinHeterogeneous
Networks
75

Migration
Migration of agents requires the transfer of the agent
data and the control state of the agent together with a
unique global agent identifier (extending the local ID
with the agent class and the relative displacement of
its root node)encapsulated in messages.
Transition Network
A switched transition network offers support for
agent activity graph reconfiguration at run-time.
Though the possible reconfiguration and the condi-
tional expressions must be known at compile time
(static resource constraints), a reconfiguration can re-
lease the use of some activity processes and enhances
the utilization for parallel processing of other agents.
The transition network is implemented with selector
tables in case of the HW implementation, and with
dynamic transition lists in case of the SW and SIM
implementations.
Tuple-space Database
Each n-dimensional tuple-space TS
n
(storing n-ary tu-
ples) is implemented with fixed size tables in case of
the hardware implementation, and with dynamic lists
in the case of the software and simulation model im-
plementations. The access of each tuple-space is han-
dled independently. Concurrent access of agents is
mutually exclusive. The HW implementation impli-
cates further type constraints, which must be known
at design time (e.g. limitation to integer values).
Signals
Signals must be processed asynchronously. There-
fore, agent signal handlers are implemented with a
separate activity process pipeline, one for each sig-
nal handler. For each pending agent signal, the agent
manager injects an agent token in the respective han-
dler process pipeline independent of the processing
state of the agent. Remote signals are processed by
the agent manager, which encapsulate signals in mes-
sages sent to the appropriate target node and agent.
4 CASE STUDY
A small example implementing a distributed feature
detection in an incompletely connected and unreliable
mesh-like sensor network using mobile agents should
demonstrate the suitability of the proposed agent pro-
cessing and design approach. The sensor network
consists of nodes with each node attached to a sen-
sor used, for example, in a structural health monitor-
ing system (e.g. strain-gauge sensors). The nodes can
be embedded in a mechanical structure, for example,
used in a robot arm. The goal of the MAS is to find
extended correlated regions of increased sensor inten-
sity (compared to the neighbourhood) due to mechan-
ical distortion resulting from externally applied load
forces. A distributed directed diffusion behaviour and
self-organization (see Figure 5) is used, derived from
the image feature extraction approach (proposed by
Liu, 2001). A single sporadic sensor activity not cor-
related with the surrounding neighbourhood should
be distinguished from an extended correlated region,
which is the feature to be detected. There are three
different agent classes: an exploration, a deliver, and
a node agent. A node agent is immobile and is primar-
ily responsible for sensor measurement, observation,
and creating of exploration agents. The feature de-
tection is performed by the mobile exploration agent,
which supports two main different behaviours: dif-
fusion and reproduction. The diffusion behaviour is
used to move into a region, mainly limited by the
lifetime of the agent, and to detect the feature, here
the region with increased mechanical distortion (more
precisely the edge of such an area). The detection of
the feature enables the reproduction behaviour, which
induces the agent to stay at the current node, setting
a feature marking and sending out more exploration
agents in the neighbourhood. The local stimuli H(i, j)
for an exploration agent to stay at a specific node with
coordinate (i, j) is given by eq. 1.
H(i, j) =
R
∑
s=−R
R
∑
t=−R
{kS(i+ s, j + t) − S(i, j)k ≤ δ}
S : Sensor Signal Strength
R : Square Region around (i, j)
(1)
The calculation of H at the current location (i, j) of the
agent requires the sensor values within the square area
(the region of interest ROI) R around this location. If
a sensor value S(i+s, j+t) with i, j∈ {-R,..,R} is similar
to the value S at the current position (diff. is smaller
than the parameter δ), H is incremented by one.
If the H value is within a parameterized interval
∆ = [ε
0
, ε
1
], the exploration agent has detected the
feature and will stay at the current node to reproduce
new exploration agents sent to the neighbourhood. If
H is outside this interval,the agent will migrate to a
neighbour different node and restarts exploration (dif-
fusion).
The calculation of H is performed by a distributed
calculation of partial sum terms by sending out child
explorer agents to the neighbourhood, which itself
can send out more agents until the boundary of the
region R is reached. Each child agent returns to its
origin node and hands over the partial sum term to his
parent agent, shown in Figure 5. Because a node in
the region R can be visited by more than one child
agent, the first agent reaching a node sets a marking
MARK
. If another agent finds this marking, it will im-
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
76
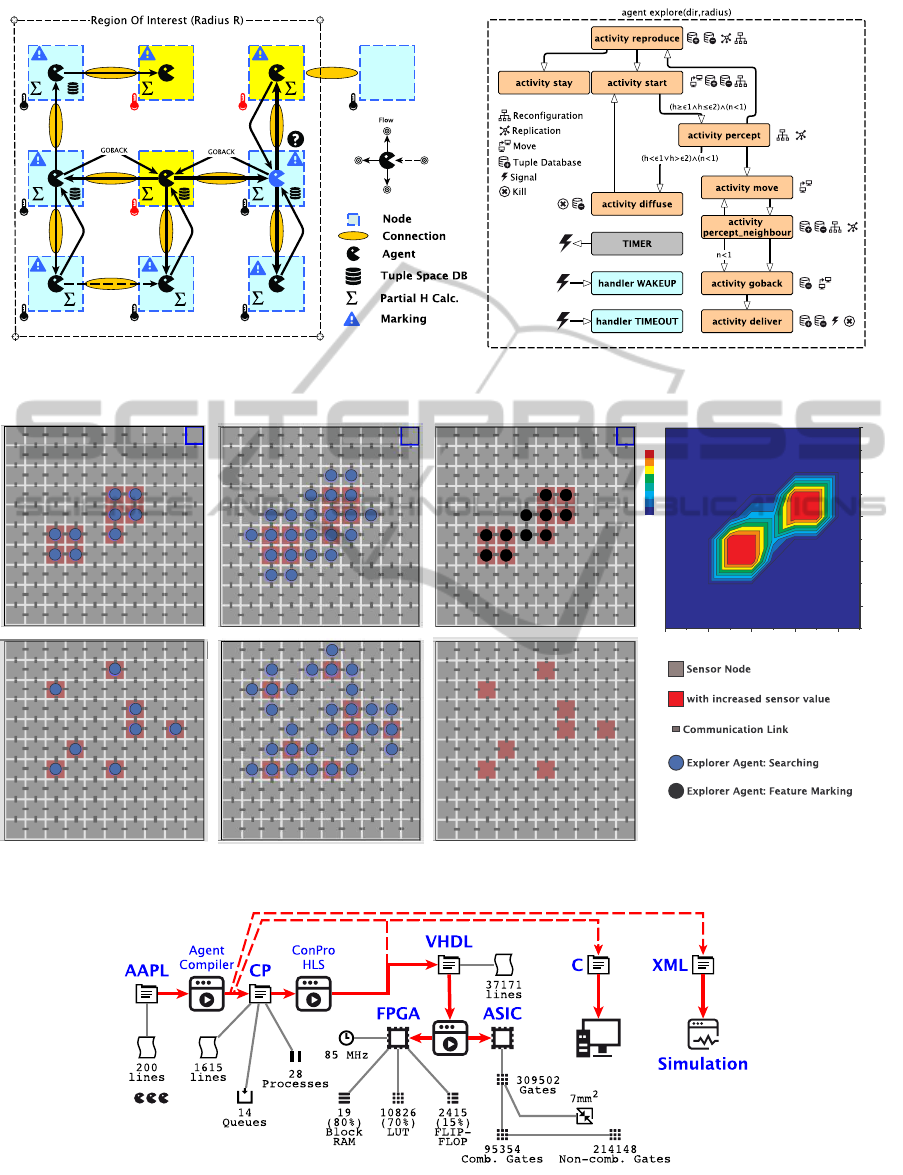
Figure 5: Distributed feature extraction in an unreliable and incomplete network by using distributed agents with migration
and self-organization behaviour (right: AAPL activity graph of the explorer agent).
ROW
COLUMN
10
1
10
3
0
1
2
Expl. Agents
1
Figure 6: Simulation results for two different sensor network situations (left: start, middle: exploration, right: final result
situation). Top row: sensor activity within clusters, bottom row: sensor activity scattered over the network.
Figure 7: High-level and gate-level synthesis results for one sensor node (FPGA: Xilinx XC3S100, ASIC: LSI10K standard
cell library, 180nm technology).
DesignofMaterial-integratedDistributedDataProcessingPlatformswithMobileMulti-agentSystemsinHeterogeneous
Networks
77

mediately return to the parent. This multi-path visit-
ing has the advantage of an increased probability of
reaching nodes with missing (non operating) commu-
nication links (see Fig. 5). A deliver agent, created
by the node agent, finally delivers exploration results
to interested nodes by using directed diffusion ap-
proaches, not discussed here.
AAPL Specification
Example 1 shows the AAPL behaviour specification
for the exploration agent. The agent behaviour is par-
titioned in nine activities and two signal handlers. If a
sensor node agent observes an increased sensor value,
it creates a new explorer agent that enters the start
activity (lines 8-19). Each explorer agent is initial-
ized on creation with two parameter arguments: a di-
rection and a radius value. The first agent created
by the sensor node has no specific direction. Child
agents with a specific direction are moved to the re-
spective node (line 11). In line 18, the transition
move
→
percept neighbour
is created (all existing tran-
sitions starting from activity
move
are deleted first).
The start activity transitions to the perceptive activ-
ity, which creates child agents (lines 44-46). Forked
agents inherit all parent data and the current transition
network configuration. Thus, in line 43 the transi-
tion
percept
→
move
is established (and inherited),
but after forking reset in lines 47-50 for the parent
agent behaviour, which await the return of all child
agents and a decision for behaviour selection (repro-
duce/diffuse). The child agents enter the
move
(lines
20-25) activity after forking and will be migrated in
the specific direction to the neighbour node.
Finally, the
percept neighbour
activity is
reached, which performs the local calculation (line
52) if there was no marking found, and stores the par-
tial result in the tuple database. Further child agents
are sent out if the boundary of the ROI is still not
reached.
Otherwise the agent goes back to his origin (par-
ent) by entering the
goback
activity performing the
migration (lines 66-68), previously updating its
h
value of the tuple database. If the returning agent
has arrived, it will deliver its
h
value by adding it
to the local
H
value stored in the database (lines 69-
72) and raising the
WAKEUP
signal to notify the parent,
which causes the entering of the parent’s signal han-
dler (lines 77-79).
If there is enough input and all child agents had
returned (or a time-out has occurred handled by the
signal handler
TIMEOUT
, lines 80-81), the exploration
agent either enters the
diffuse
or
reproduce
activ-
ity.
Diffusion and reproduction is limited by a lifetime
(decreased each time an explorer agent is replicated or
on migration, lines 27 & 36).
The agent behaviour specification was synthesized
to a digital logic hardware implementation (single
SoC) and a simulation model with equal functional
behaviour suitable for the MAS simulator environ-
ment SeSAm (Kl¨ugel, 2009).
Simulation Results
Simulation results are shown in Figure 6 for two dif-
ferent sensor network situations, each consisting of a
network with autonomous sensor nodes arranged in
10 rows and 10 columns. One situation creates sig-
nificant sensor values arranged in a bounded cluster
region, for example, caused by mechanical forces ap-
plied to the structure, and the other situation creates
significant sensor values scattered around the network
without any correlation, for example, caused by noisy
or damaged sensors.
In the first clustered situation, the explorer agents
are capable to detect the bounded region feature for
the two separated regions (indicated by the change
of the agent colour to black). Due to the reproduc-
tion behaviour there are several agents at one loca-
tion, shown in the right agent density contour plot. In
the second not clustered situation, the explorer agents
did not find the feature and vanish due to their limited
lifetime behaviour.
The feature search is controlled by a set of param-
eters: {δ,ε
0
, ε
1
,lifetime,search radius R}.
Synthesis Results
The synthesis results of the hardware implementation
for one sensor node are shown in Fig. 7. The AAPL
specification was compiled to the ConPro program-
ming model and synthesized to an RTL implementa-
tion on VHDL level. Two different target technolo-
gies were synthesized using gate-level synthesis: 1.
FPGA, Xilinx XC3S1000 device target using Xilinx
ISE 9.2 software, 2. ASIC standard cell LIS10K li-
brary using the Synopsys Design Compiler software.
The agent processing architecture consisted of the ac-
tivity process chain for the explorer and node agent,
the agent manager, the tuple-space database (support-
ing two- and three-dimensional tuples with integer
type values), and the communication unit. The pro-
cessing time of an activity is in the order of 10 µs.
This case study showed 1. the suitability of agent-
based approaches for large scale sensor networks, for
example used for real-time structural health monitor-
ing, and 2. the suitability of the proposed agent mod-
elling and synthesis approach for single System-on-
Chip microchip-level implementations.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
78

Example 1: Shortened and simplified excerpt of the AAPL
specification for agent class
Explore
.
1
type keys=
{
ADC,FEATURE,H,MARK
}
;direction=
{
..
}
2
signal WAKEUP,TIMEOUT; val RADIUS := 4; ...
3
agent explore
(dir:direction,
4
radius:integer[1..16]) =
5
var dx,dy:integer[-100..100];
6
live:integer[0..15]; ......
7
var* s: integer[0..1023]; ......
8
activity start
=
9
dx := 0; dy := 0; h:= 0;
10
if dir
<>
ORIGIN then
11
moveto
(dir);
12
case dir of
13
|
NORTH -
>
backdir := SOUTH
14
|
SOUTH -
>
......
15
else
16
live := MAXLIVE; backdir := ORIGIN
17
group := random(integer[0..1023]);
18
transition*
(move,percept neighbour);
19
out
(H,id(self),0);
rd
(ADC,s0?)
20
activity move
=
21
case dir of
22
|
NORTH -
>
backdir := SOUTH; incr(dy)
23
|
SOUTH -
>
backdir := NORTH; decr(dy)
24
|
WEST -
>
....
25
moveto
(dir)
26
activity diffuse
=
27
decr(live);
rm
(H,id(self),?);
28
if live
>
0 then
29
case backdir of
30
|
NORTH -
>
dir :=
31
random(
{
SOUTH,EAST,WEST
}
)
32
|
SOUTH -
>
....
33
else
kill
(ME)
34
activity reproduce
=
35
var n:integer;
36
decr(live);
37
if live
>
0 then
38
for nextdir in direction do
39
if nextdir
<>
backdir
..
and
link?
(nextdir) then
40
fork
(nextdir,radius)
41
transition*
(reproduce,stay)
42
activity percept
= -- Master perception --
43
enoughinput := 0;
..
transition*
(percept,move);
44
for nextdir in direction do
45
if nextdir
<>
backdir
..
and
link?
(nextdir)then
46
incr(enoughinput);
fork
(nextdir,radius)
47
transition*
(percept,diffuse,(h
<
ETAMIN
48
or h
>
ETAMAX) and enoughinput
<
1);
49
transition+
(percept,reproduce,h
>
= ETAMIN
50
and h
<
= ETAMAX and enoughinput
<
1);
51
timer+(TMO,TIMEOUT)
52
activity percept neighbour
=
53
if not
exist?
(MARK,group) then
54
mark
(TMO,MARK,group);
..
enoughinput:= 0;
55
rd
(ADC,s?);
out
(H,id(self),calc());
56
transition*
(percept neighbour,move);
57
for nextdir in direction do
58
if nextdir
<>
backdir
..
and inbound(nextdir) and
59
link?
(nextdir) then
60
incr(enoughinput);
fork
(nextdir,radius)
61
transition
*(percept neighbour,goback,
62
enoughinput
<
1);
63
timer+
(TMO,TIMEOUT)
64
else
65
transition*
(percept neighbour,goback)
66
activity goback
=
67
h := 0;
try in
(0,H,id(self),h?);
68
moveto
(backdir);
69
activity deliver
=
70
var v:integer;
71
in
(H,id(parent),v?);
out
(H,id(parent),h+v);
72
send
(id(parent),WAKEUP);
kill
(ME)
73
activity stay
=
74
rm(H,id(self),?)
;
75
n :=0;
try in
(0,FEATURE,n?);
76
out
(FEATURE,n+1)
77
handler WAKEUP
=
78
decr(enoughinput);
try rd
(0,H,id(self),h?);
79
if enoughinput
<
1 then
timer-
(TIMEOUT)
80
handler TIMEOUT
=
81
enoughinput := 0; again := true
82
function calc
():integer=
83
if abs(s-s0)
<
= DELTA then return 1
84
else return 0
85
function inbound
(nextdir:direction):bool=
86
case nextdir of
87
|
NORTH -
>
return (dy
<
RADIUS)
88
|
SOUTH -
>
......
89
transitions
=
90
start -
>
percept; percept -
>
move;
91
move -
>
percept neighbour;
92
.....
5 CONCLUSIONS
A novel design approach using mobile agents for
reliable distributed and parallel data processing in
large scale networks of low-resource nodes was intro-
duced. An agent-orientated programming language
AAPL provides computational statements and state-
ments for agent creation, inheritance, mobility, in-
teraction, reconfiguration, and information exchange,
based on agent behaviour partitioning in an activ-
ity graph, which can be directly synthesized to the
microchip level by using a high-level synthesis ap-
proach. The high-level synthesis tool also enables
the synthesis of different processing platforms from a
common program source, including standalone hard-
ware and software platforms, as well as simulation
models offering functional and behavioural testing.
Agents of the same class share one virtual ma-
chine consisting of a reconfigurable pipelined multi-
process chain based on the CSP model implement-
ing the activities and transitions, offering parallelized
agent processing with optimized resource sharing.
Unique identification of agents does not require
unique absolute node identifiers or network addresses,
a prerequisite for loosely coupled and dynamic net-
works (due to failures, reconfiguration, or expansion).
DesignofMaterial-integratedDistributedDataProcessingPlatformswithMobileMulti-agentSystemsinHeterogeneous
Networks
79

The migration of an agent to a neighbour node takes
place by migrating the data and control state of an
agent using message transfers. Two different agent
interaction primitives are available: signals carry-
ing data and tuple-space database access with pattern
templates.
Reconfiguration of the activity transition network
offers agent behaviour adaptation (which can be in-
herited by child agents) at runtime and improved
resource sharing for parallel agent processing. A
case study demonstrated the suitability of the pro-
posed programming model, processing architecture,
and synthesis approach. Migration of agents requires
only the transfer of the control and data space of an
agent using messages.
REFERENCES
Bosse, S. (2013). Intelligent Microchip Networks: An
Agent-on-Chip Synthesis Framework for the Design
of Smart and Robust Sensor Networks. Proceedings
of the SPIE 2013 Microtechnologies Conference
Guijarro, M., Fuentes-fernandez, R., Pajares, G. (2008).
A Multi-Agent System Architecture for Sensor Net-
works. Multi-Agent Systems - Modeling, Control, Pro-
gramming, Simulations and Applications.
Zhao, X., Yuan, S., Yu, Z., Ye, W., Cao., J.
(2008). Designing strategy for multi-agent sys-
tem based large structural health monitoring. Ex-
pert Systems with Applications, 34(2), 1154 - 1168.
doi:10.1016/j.eswa.2006.12.022
Pantke, F., Bosse, S., Lehmhus, D., Lawo, M. (2011).
An Artificial Intelligence Approach Towards Senso-
rial Materials. Future Computing Conference
Kl¨ugel, F. (2009). SeSAm: Visual Programming and Par-
ticipatory Simulation for Agent-Based Models. In:
Multi-Agent Systems - Simulation and Applications,
A. M. Uhrmacher, D. Weyns (ed.), CRC Press
Bosse, S. (2011). Hardware-Software-Co-Design of Par-
allel and Distributed Systems Using a unique Be-
havioural Programming and Multi-Process Model
with High-Level Synthesis. Proceedings of the SPIE
Microtechnologies 2011 Conference, Session EMT
102
Kone, M. T., Shimazu, A., Nakajima, T. (2000). The
State of the Art in Agent Communication Languages.
Knowledge and Information Systems, 2(3), 259 - 284.
doi:10.1007/PL00013712
Ebrahimi, M., Daneshtalab, M., Liljeberg, P., Plosila, J.,
Tenhunen, H. (2011). Agent-based on-chip network
using efficient selection method. IEEEIFIP 19th In-
ternational Conference on VLSI and SystemonChip
(pp. 284-289)
Sansores, C., Pavon, J. (2008). An Adaptive Agent Model
for Self-Organizing MAS. In Proc. of 7th Int. Conf. on
Autonomous Agents and Multiagent Systems (AAMAS
2008), May, 12-16., 2008, Estoril, Portugal, pp. 1639
- 1642.
McCabe, F. G., Clark, K. L. (1995). APRIL - Agent Process
Interaction Language, (M. Wooldridge & N. R. Jen-
nings, Eds.). Intelligent Agents Theories Architectures
and Languages LNAI volume 890. Springer-Verlag.
Lang, W. Jakobs, F., Tolstosheeva, E., Sturm, H., Ibragimov,
A., Kesel, A., Lehmhus, D., Dicke, U. (2011). From
embedded sensors to sensorial materials - The road to
function scale integration. Sensors and Actuators A:
Physical, Volume 171, Issue 1
Liu, J. (2001). Autonomous Agents and Multi-Agent Sys-
tems. World Scientific Publishing, (ISBN 981-02-
4282-4)
Meng, Y. (2005). An Agent-based Reconfigurable System-
on-Chip Architecture for Real-time Systems. In Pro-
ceeding ICESS ’05 Proceedings of the Second Inter-
national Conference on Embedded Software and Sys-
tems, pp. 166 - 173.
Jamont, J. P., Occello, M. (2008). A multiagent method
to design hardware/software collaborative systems,
2008. 12th International Conference on Computer
Supported Cooperative Work in Design
Naji, H. (2004). Creating an adaptive embedded system
by applying multi-agent techniques to reconfigurable
hardware. Future Generation Computer Systems, vol.
20, no. 6, pp. 1055 - 1081
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
80
