
Shape-based Segmentation of Tomatoes for Agriculture Monitoring
Ujjwal Verma
1,2
, Florence Rossant
1
, Isabelle Bloch
2
, Julien Orensanz
3
and Denis Boisgontier
3
1
ISEP, Paris, France
2
Institut Mines-Telecom, T
´
el
´
ecom ParisTech, CNRS LTCI, Paris, France
3
Cap2020, Gironville sur Essonne, France
Keywords:
Image Segmentation, Parametric Active Contours, Shape Constraint, Precision Farming, Elliptic Approxima-
tion.
Abstract:
In this paper, we present a segmentation procedure based on a parametric active contour with shape constraint,
in order to follow the growth of the tomatoes from the images acquired in the field. This is a challenging task
because of the poor contrast in the images and the occlusions by the vegetation. In our sequential approach,
considering one image per day, we assume that a segmentation of the tomatoes is available for the image
acquired the previous day. An initial curve for the active contour model is computed by combining gradient
information and region information. Then, an active contour with shape constraint is applied to provide an
elliptic approximation of the tomato boundary. We performed a quantitative evaluation of our approach by
comparing the results with the manual segmentation. Given the varying degree of occlusion in the images, the
image data set was divided into three categories, based on the occlusion degree of the tomato in the processed
image. For the cases with low occlusion, good results were obtained, with an average relative distance between
the manual segmentation and the automatic segmentation of 2.73% (expressed as percentage of the size of
tomato). For the images with significant amount of occlusion, a good segmentation was obtained on 44% of
the images, where the average error was less than 10%.
1 INTRODUCTION
Optimal harvesting date and predicted yield are valu-
able information when farming open field tomatoes,
making harvest planning and work at the process-
ing plant much easier. Monitoring tomatoes during
their early stages of growth is also interesting to as-
sess plant stress or abnormal development. Satellite
data and crop growth modeling are generally used for
estimating the yield of a large region (Prasad et al.,
2006),(Mkhabela et al., 2011). However, satellite data
are affected by adverse climatic conditions (clouds,
etc.) resulting in inaccurate predictions(Mkhabela
et al., 2011). Crop growth modeling, which inte-
grates information regarding the cultivated plant, soil
and weather conditions, considers the ideal case with
no infected plant. Recent studies have concentrated
on combining these two approaches(Zhao and Pei,
2013). Nevertheless these methods depend on the
quality of the different parameters involved (vegeta-
tion indices, soil and weather information) and they
are not accurate enough to detect abnormal develop-
ment.
In this work, we present a different approach
where we intend to monitor the growth of tomatoes
and measure their size in an open field. For this pur-
pose, two cameras are installed in the field and two
images are captured at regular intervals. In order to
avoid a complete 3D reconstruction, we assume that a
tomato can be approximated by a sphere in the 3D
space, which projects into an ellipse in the image
plane. Hence, the first part of our system aims at de-
tecting and segmenting the tomatoes in both images,
using elliptic approximations. Then, the second part
aims at estimating the sphere radius, using the camera
parameters. An estimate of the yield is obtained from
this information. In this paper, we focus on the seg-
mentation procedure only.
Computer vision algorithms have been applied in
the agricultural domain in order to replace human op-
erators with an automated system. They have been
used to grade and sort agricultural products (Jayas
et al., 2000; Du and Sun, 2006; Narendra and Ha-
reesh, 2010), to detect weeds in a field (Aitkenhead
et al., 2003; Yang et al., 2000; Lee et al., 1999), and
to model the growth of fruits and then predict the
402
Verma U., Rossant F., Bloch I., Orensanz J. and Boisgontier D..
Shape-based Segmentation of Tomatoes for Agriculture Monitoring.
DOI: 10.5220/0004818804020411
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 402-411
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

yield (Aggelopoulou et al., 2011; Stajnko and Cme-
lik, 2005). In (Aggelopoulou et al., 2011), the yield
of an apple orchard is estimated using only the den-
sity of flowers. In (Stajnko and Cmelik, 2005), only 5
images captured at different stages of the apple matu-
ration are studied in order to predict the yield. How-
ever, to the best of our knowledge, there has not been
any related work where the growth of a fruit or veg-
etable is studied based on the images captured during
the entire agricultural season.
There is little growth of a tomato during a given
day. So, only one image per day is analyzed in this
work, thus creating a series of images (approximately
20-30 images). One of the difficulties of the segmen-
tation part is occlusion: most of the tomatoes are par-
tially hidden by other tomatoes and/or leaves (Figure
1). Moreover, color information is not of much use as
tomatoes are red only at the end of the ripening. Also,
another difficulty is a very low contrast in some cases
due to shadows.
(a) 6
th
image. (b) 7
th
image.
Figure 1: Two successive images of the tomato S = 7.
In this work, the segmentation should be as auto-
matic as possible. However, we assume that an opera-
tor validates each obtained segmentation. If the result
is poor, the operator rejects it. Indeed, given the dif-
ficulties, the segmentation is a very challenging task,
and a manual validation is preferable. This approach
enables us to use the segmentation done in the i
th
im-
age (if validated) as a reference for the segmentation
of the same tomato in the (i + 1)
th
image.
In order to segment the tomatoes, we use a para-
metric active contour model, which allows us to in-
troduce a priori knowledge on the shape of the object
to be segmented, thus making the segmentation more
robust to noise and occlusion. Using an elliptic shape
constraint is consistent with our prior assumption.
The main steps of the segmentation algorithm are
the following: first, gradient information is used in or-
der to find the candidate contour points and propose
several elliptic approximations using the RANSAC
algorithm. Secondly, region information is added, en-
abling us to select the best ellipse for the initialization
of the active contour and finding the regions of poten-
tial occlusions. Third, the active contour with elliptic
constraint is applied. Finally, four ellipse estimates
are computed. The operator has only to select the best
one as the final segmentation.
The original features of the proposed algorithm in-
clude the approximation of the tomatoes as ellipses
and the conditioning of the computation of the image
energy by the non-occluded regions. These features
allow coping with occlusions and local loss of con-
tour and edges.
We present the active contour model with shape
constraint in Section 2 and the different steps of the
segmentation algorithm in Section 3. Section 4 dis-
cusses the experimental results.
2 ACTIVE CONTOUR WITH AN
ELLIPTICAL SHAPE PRIOR
Parametric active contour model or snake was orig-
inally introduced by (Kass et al., 1988) in order to
detect a boundary of an object in an image. This al-
gorithm deforms the contour iteratively from its initial
position towards the edges of an object by minimiz-
ing an energy functional. The energy functional asso-
ciated with the contour v is usually composed of three
terms:
E
T
(v) = E
I
(v) + E
Im
(v) + E
Ext
(v) (1)
where E
I
(v) is the internal energy controlling the
smoothness of the curve and E
Im
(v) is the energy de-
rived from image data. The external energy E
Ext
(v)
can express contextual information, such as shape in-
formation. The authors in (Foulonneau et al., 2006)
used Legendre moments to define an affine invariant
shape prior in a region based active contour. In our
case, the region information is not significant due to
the presence of leaves (occlusions) and other toma-
toes of similar intensity profile. In (Charmi et al.,
2009), Fourier descriptors are used in order to align
the active contour with the reference curve of suit-
able shape and orientation. In our work, the tomato
in each image is assumed to have an ellipse shape.
Since ellipses are easily represented in a parametric
form from a few parameters, it is natural to propose a
parametric active contour model.
Let us define the reference ellipse as z
e
. This el-
lipse is estimated from the evolving contour z. Both
curves are expressed in polar coordinates with the ori-
gin at the center of z
e
:
z
e
(θ) = r
e
(θ)e
jθ
, z(θ) = r(θ)e
jθ
, θ ∈ [0, 2π] (2)
Shape-basedSegmentationofTomatoesforAgricultureMonitoring
403

Our energy functional with an elliptic shape regular-
ization is defined as:
E
T
(r, r
e
) =
Z
2π
0
α
2
|r
0
(θ)|
2
dθ +
Z
2π
0
E
Im
(r(θ)e
jθ
)dθ
+
ψ
2
Z
2π
0
|r(θ) − r
e
(θ)|
2
dθ (3)
In the above equation, the first term represents the in-
ternal energy which controls the variations of r and
makes it regular. The second term is a classical image
energy calculated from the gradient vector flow (Xu
and Prince, 1998). The last term restricts the evolving
contour to be close to the reference ellipse. The pa-
rameter α controls the smoothness of the curve, and
ψ controls the influence of the shape prior on the total
energy. Note that instead of modifying a 2-D vector
v(s) = (x(s), y(s)) as in the classical active contour
model, only a 1-D vector r(θ) is modified for each
value of the parameter θ. Moreover, the shape con-
straint makes the usual second derivative term in the
internal energy useless, and is therefore not included
in the proposed energy functional.
The minimum of E
T
is obtained in two steps:
First, a least square estimate of the ellipse z
e
is com-
puted from the initial contour z
0
. Then, the evolving
contour z is computed by minimizing E
T
while as-
suming z
e
fixed. From the evolving contour z so ob-
tained, the parameters of the least square estimate of
the ellipse z
e
are regularly updated. This two-step it-
erative process is repeated, in order to obtain the min-
imum of E
T
.
The minimization of E
T
with respect to r is equiv-
alent to solving the following Euler equation:
−αr
00
(θ)+∇E
Im
(θ)·n(θ)+ψ(r(θ)−r
e
(θ)) = 0 (4)
where n(θ) = [cosθ, sin θ]
T
.
To find iteratively a solution of this equation, we
introduce a time variable, and the resulting equation
is discretized using finite differences, as in the case of
the classical active contours.
3 DETAILED ALGORITHM
In this section, we present an algorithm which allows
us to follow the growth of a tomato, which has been
manually segmented in the first image (i = 1).
Let us denote by im
i+1
the (i + 1)
th
image of the
tomato S. In the rest of this paper, an ellipse cen-
tered at [xc,yc], whose semi major and minor axes
lengths are a and b, respectively, and which has a rota-
tion angle of ϕ, is represented as Ell = [xc, yc, a, b, ϕ].
The tomato approximated by an ellipse in im
i
is rep-
resented as Ell
i
= [xc
i
, yc
i
, a
i
, b
i
, ϕ
i
]. In our sequen-
tial approach, the computation of the contour in the
(i + 1)
th
image is based on both the information in
im
i+1
and the contour of the tomato in the i
th
image.
In the following sections, it is assumed that there is
little movement and little growth of tomatoes between
two successive images (Figure 2).
3.1 Pre-processing
As mentioned above, the color information is not of
much use. However, the edges of tomatoes are more
prominent in the red component of the image, and
hence only this component is considered. The orig-
inal image is cropped around the position (xc
i
, yc
i
),
resulting in a smaller image (imS
i+1
c
). The contrast is
enhanced by a contrast stretching transformation.
3.2 Updating the Tomato Position
Due to its increasing weight, the tomato tends to
fall towards the ground (Figure 2) and its position
in imS
i+1
c
is calculated, using pattern matching. The
bright areas, that may correspond to the tomato, are
extracted by convolving the cropped image with a
binary mask representing a white disk of radius χr
i
where
r
i
=
a
i
+ b
i
2
(5)
and χ is a constant determined experimentally. The
local maxima C
i+1
c
= {(x
k
, y
k
), k = 1, ..., k
n
} are then
extracted. From these k
n
points, the one C
m
=
(x
m
, y
m
), which is the closest to (xc
i
, yc
i
), is selected
as the new location of the tomato center (Figure 2(b)).
A new cropped image imS
i+1
is then extracted
from im
i+1
, centered at C
m
= (x
m
, y
m
). The size of
this new image is adapted to the size of the tomato
(deduced from a
i
and b
i
) so that we restrict the region
to be analyzed as much as possible, reducing thus the
processing cost of the next steps. The contrast stretch-
ing transformation is applied to imS
i+1
.
(a) 7
th
image. (b) 8
th
image.
Figure 2: Updating the position of the tomato: previous po-
sition (xc
i
, yc
i
) in red, candidate positions C
i+1
c
in magenta
and blue, and new position C
m
in blue.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
404

3.3 Elliptic Approximations
In order to obtain an initial contour for the active con-
tour model, we first compute l
n
points which may lie
on the boundary of the tomato. From these l
n
points,
a RANSAC estimate is used to obtain several candi-
date ellipses. Finally, one of these ellipses is selected
as the initial contour based on additional region infor-
mation and size regularization (Section 3.4.2).
3.3.1 Detection of Tomato Contour Points
Let us take C
m
as the origin of the polar coordinate
system. Then we select l
n
points P
l
= p
l
e
jθ
l
, where
l = 1, ..., l
n
, 0 < θ
l
< 2π, that satisfy the following
three conditions:
0.5r
i
< p
l
< 1.5r
i
(6)
|arg(∇imS
i+1
(P
l
)) − θ
l
| ≤
π
8
(7)
|∇imS
i+1
(P
l
)| > η (8)
where ∇imS
i+1
(P
l
) is the gradient at P
l
in imS
i+1
. The
above conditions select the points of strong gradient
whose direction is within an acceptable limit with re-
spect to the vector normal to the circle with radius
r
i
. The threshold values have been set experimen-
tally. As shown in Figure 5(a), most points lying on
the boundary of the tomato have been correctly de-
tected along with some additional points lying on the
leaves.
3.3.2 Calculation of Several Ellipses from the
Points P
l
using RANSAC Estimation
A least square estimate of an ellipse calculated from
all l
n
points might result in a contour far away from
the actual boundary because of the detection of irrel-
evant points. Therefore, we use a RANSAC (Fischler
and Bolles, 1981) estimate based on an elliptic model
in order to compute several candidate ellipses.
Under normal circumstances, the size and the ori-
entation of the tomato in imS
i+1
are supposed to be
close to the ones in imS
i
. This information is incorpo-
rated in the RANSAC estimation and only the ellipses
whose parameters satisfy the following conditions are
considered:
−0.1 <
a
i+1
− a
i
a
i
< 0.2, −0.1 <
b
i+1
− b
i
b
i
< 0.2 (9)
−0.1 <
SA
i+1
− SA
i
SA
i
< 0.25 (10)
|
Ecc
i+1
− Ecc
i
Ecc
i
| < 0.1 (11)
|
ϕ
i+1
− ϕ
i
ϕ
i
| < 0.2 (12)
where SA
i+1
and SA
i
represent the surface of the el-
lipses in imS
i+1
and imS
i
respectively. The eccentric-
ity (Ecc =
a
b
) for the two ellipses is denoted by Ecc
i+1
and Ecc
i
respectively.
Negative variations for a and b (Equation 9) are
possible because of the movement of the tomato with
respect to the camera or because of the variation in the
orientation, as tomatoes are actually not perfect spher-
ical objects. Equation 10 restricts the apparent size of
the tomato while Equation 11 restricts the admissible
values for eccentricity, thus controlling the apparent
shape of the tomato.
The threshold values in Equations 9-12 have been
determined after studying the parameters of the el-
lipses obtained from the manual segmentation of five
tomatoes. For example, Figures 3 and 4 shows
the relative evolution of the surface SA and length
of semi-major axis a of the ellipses. Most of the
measurements are situated within the limits defined
above. Note that the dissymmetry in the lower and
upper bounds in Equations 9-10 is due to the fact that
tomatoes are supposed to grow during the agricultural
season.
Figure 3: Evolution of SA. The abscissa represents the im-
age number (i), and the ordinate represents
SA
i+1
−SA
i
SA
i
. The
solid horizontal red lines show the selected threshold val-
ues.
Figure 4: Evolution of a. The abscissa represents the image
number (i), and the ordinate represents
a
i+1
−a
i
a
i
. The solid
horizontal red lines show the selected threshold values.
From the N ellipses computed using the RANSAC
algorithm, a total of N
a
ellipses, with N
a
< N, are
retained, corresponding to the N
a
ellipses with the
largest number of inliers (Figure 5(b)).
Shape-basedSegmentationofTomatoesforAgricultureMonitoring
405

(a) P
l
points detected. (b) N
a
(N
a
= 20) ellipses.
Figure 5: Points of strong gradient and ellipses detected us-
ing the RANSAC estimate.
3.4 Adding Region Information
A region growing algorithm is applied in order to
add region information and determine the best initial-
ization for the active contour among the N
a
ellipses
Ell
i+1
u
, where u = 1, ..., N
a
. Moreover, potential oc-
clusions are also derived from this information.
3.4.1 Using Region Growing to Calculate the
Region Representing a Tomato
Let us denote by ω
u
the binary image representing the
region inside the ellipse Ell
i+1
u
. We apply a classical
region growing algorithm starting from ω
seed
and lim-
iting the growing to ω
limit
, where:
ω
seed
=
N
a
\
u=1
ω
u
, ω
limit
=
N
a
[
u=1
ω
u
(13)
The final region is denoted by ω
t
(Figure 6(a)).
3.4.2 Selecting the Initial Contour
We define τ
m
as:
τ
m
= min
u=1,2,....N
a
τ(u) (14)
with
τ(u) =
|ω
u
∩ (1 − ω
t
)| + |(1 − ω
u
) ∩ ω
t
|
|ω
u
∩ ω
t
|
(15)
where |A| represents the cardinality of a set A. τ(u)
measures the consistency between the segmentation
obtained through the contour analysis ω
u
and the re-
gion analysis ω
t
. It reaches a minimum (zero) when
ω
u
and ω
t
match perfectly.
Let us denote by a
i+1
u
and b
i+1
u
the axes lengths
of the candidate ellipse Ell
i+1
u
, u ∈ [1, N
a
]. We
select the ellipse v (Figure 6(b)) that minimizes
h
a
i+1
u
− a
i
)
2
+ (b
i+1
u
− b
i
2
i
under the condition
τ(v) ≤ 1.1 τ
m
(16)
Thus, we have obtained the initial contour by com-
bining the results obtained using two different seg-
mentation methods, one based on boundary informa-
tion and the other based on region information. The
selected ellipse Ell
i+1
v
is chosen among the ones for
which both results are consistent, allowing therefore
a better robustness with respect to occlusions. More-
over, another regularization condition is added, which
imposes that the size and shape of the ellipse in imS
i+1
are close to the ones in imS
i
.
(a) ω
t
. (b) Ell
i+1
v
.
Figure 6: Result of the region growing (ω
t
) and selection of
the initial ellipse Ell
i+1
v
.
3.4.3 Finding Potential Occlusion
This part aims at finding the regions where occlusions
could disturb the behavior of the active contour. For
example, the region in which the tomato is attached to
the plant has a different intensity from the one of the
tomato.
Let Ell
te
denote the ellipse which covers the con-
vex hull of ω
t
and which minimizes the number of
pixels inside the ellipse Ell
te
and not belonging to the
region ω
t
(Figure 7(a)). Let ω
te
be the region inside
Ell
te
. Then, the region of occlusion ω
oc
can be com-
puted as:
ω
oc
= ω
te
∩ ω
c
t
(17)
Using morphological operations (erosion fol-
lowed by reconstruction by dilation), small regions
are removed from ω
oc
, so that the resulting ω
oc
corre-
sponds to actual leaves causing the occlusions (Figure
7(b)). Apart from detecting the “head” of the tomato,
any other additional occlusion (mostly due to leaves)
can also be detected using this approach (Figure 7(b)).
3.5 Applying Active Contours
The active contour (Section 2) is applied
with the following initialization Ell
i+1
vc
=
[xc
i+1
v
, yc
i+1
v
, 0.95a
i+1
v
, 0.95b
i+1
v
, ϕ
i+1
v
]. Indeed,
the movement of the curve z is smoother and faster
if initialized inside the tomato. For the first n
start
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
406

(a) Ell
te
. (b) ω
oc
.
Figure 7: Detecting the regions of potential occlusion.
iterations, the parameter ψ is set to zero, so that z
moves towards the most prominent contours. Then
the shape constraint is introduced for n
ellipse
iterations
(ψ 6= 0) in order to guarantee robustness with respect
to occlusion. Finally, the shape constraint is relaxed
(ψ = 0) for a few n
end
iterations, which guarantees
reaching the boundary more accurately, as a tomato
is not a perfect ellipse.
Note that the image forces are not considered in
the region of occlusion ω
oc
, in every step of this pro-
cess.
Updating the Reference Ellipse: As explained in
Section 2, the reference ellipse z
e
is updated every
n
shape
iterations. A least square estimate calculated
from all the points of the curve z is not relevant, be-
cause some of them may lie on false contours (e.g.
leaves). So, the following algorithm aims at selecting
a subset of points that actually lie on the boundary of
the tomato.
We use a polar coordinate system with the origin
at the center of the current reference ellipse z
e
. As in
Section 2, let us denote by z(θ) = r(θ)e
jθ
a point of
the evolving curve, z
e
(θ) = r
e
(θ)e
jθ
the correspond-
ing point on the reference ellipse, n
e
(θ) the vector
normal to the ellipse z
e
, and z
q
(θ) = r
q
(θ)e
jθ
the point
that maximizes the gradient module for 0 < r
q
(θ) <
1.1r
e
(θ). The point z(θ) is selected as a point lying on
the boundary of the tomato if it satisfies the following
conditions:
|∇imS
i+1
(z(θ)) · n
e
(θ)| > Γ (18)
|∇imS
i+1
(z(θ)) · n
e
(θ)|
|∇imS
i+1
(z(θ))|
> 0.75 (19)
d(z
q
(θ), z(θ)) < d
max
(20)
where · represents the vector dot product.
The first condition ensures that the magnitude of
the gradient vector projected onto the normal of the
ellipse is strong. The threshold Γ is determined auto-
matically (Otsu, 1975). The second condition ensures
that the direction of the gradient is close to the vector
normal to the ellipse. The last condition (d
max
= 2 in
our experiments) imposes that the point considered is
a meaningful local maximum of the gradient. Finally,
the parameters of the reference ellipse are updated by
calculating a least square approximation from the sub-
set of points lying on the evolving contour z selected
using the above conditions (Figure 8(a)).
(a) Updating z
e
from se-
lected points (green).
(b) Final contour z.
Figure 8: Active contour with shape constraint.
3.6 Refining the Results
A least square estimate of an ellipse from z (Fig-
ure 8(b)) is generally not relevant as outliers may be
present due to occlusion. So, again, a selection proce-
dure is applied. A first subset of points P
h
is obtained
by using criteria similar to the ones described in Sec-
tion 3.5 (Equations 18-20) . Then, another subset P
0
h
is computed by relaxing the condition related to the
gradient direction (Figure 9).
(a) set of points P
h
. (b) Points P
0
h
.
Figure 9: Two different set of points P
h
and P
0
h
.
Final Contour: Then four ellipses are computed as
follows:
1. A least square approximation Ell
i+1
f 1
=
[xc
i+1
f 1
, yc
i+1
f 1
, a
i+1
f 1
, b
i+1
f 1
, ϕ
i+1
f 1
] is computed from
all the points of z.
2. Another estimate Ell
i+1
f 2
=
[xc
i+1
f 2
, yc
i+1
f 2
, a
i+1
f 2
, b
i+1
f 2
, ϕ
i+1
f 2
] is obtained from P
0
h
Shape-basedSegmentationofTomatoesforAgricultureMonitoring
407

using the RANSAC algorithm with the following
conditions:
0.9a
i+1
f 1
< a
i+1
f 2
< 1.1a
i+1
f 1
(21)
0.9b
i+1
f 1
< b
i+1
f 2
< 1.1b
i+1
f 1
(22)
3. A least square approximation Ell
i+1
f 3
is obtained
from the subset P
h
.
4. A weighted least square estimate Ell
i+1
f 4
is ob-
tained where the points of P
h
are assigned a higher
weight (0.75) and the other points of z a lower
weight (0.25). This is done in order to give impor-
tance to the points that are surely on the boundary
of the tomato.
If the images have a good contrast, and little or no oc-
clusion, all the four ellipses will be almost identical
(Figure 10(a)). However, in case of occlusions and
poor contrast, the four ellipses may be different (Fig-
ure 10(b)).
(a) 8
th
image. (b) 17
th
image: P
h
(yellow)
and P
0
h
(green).
Figure 10: Final ellipse estimates for two different images.
4 RESULTS
Two cameras (Pentax Optio W80) were installed in
an open field of tomatoes. The same setup was used
for two agricultural seasons (April-August, 2011 and
2012), capturing one image per day. We have identi-
fied 10 tomatoes, covering different sites and differ-
ent seasons, thus ensuring variability (302 images in
total). The tomatoes were identified manually by ob-
serving the images of the entire agricultural season.
Due to the severe occlusions, only a limited number of
tomatoes were visible in most of the images of a given
season. Therefore, only the tomatoes which were vis-
ible in more than 10 consecutive images were studied.
The obtained segmentations A were compared
with the manual segmentations M (approximated by
ellipses) by computing the average D
i
mean
and maxi-
mal D
i
max
distance between A and M for the i
th
im-
age (expressed in pixels). In order to better interpret
the results, the maximum and mean distances between
two contours are normalized by the size of the tomato
as:
D
i
meanR
=
D
i
mean
r
i
100 (23)
D
i
maxR
=
D
i
max
r
i
100 (24)
where r
i
is defined in Equation 5.
The data set contains images of varying contrast
and degree of occlusions. Obviously, it is impossible
to obtain a reliable segmentation in case of severe oc-
clusion, even manually. Consequently we studied ex-
perimentally the effect of the percentage of occlusion
on the final estimation of the radius of a spherical ob-
ject (considering the complete system, segmentation
and partial 3D reconstruction). In our experiments,
the percentage P of occlusion corresponds to the oc-
clusion of an arc with subtended angle equal to
2πP
100
.
For less than 30% occlusion, the variation in the esti-
mated radius was very small, and for more than 30%
occlusion, significant change in the values of the esti-
mated radius was observed. Thus, we identified three
different categories:
• Category 1, containing images with an amount of
occlusion P less than 30% for which the estima-
tion is very robust with respect to segmentation
imprecision (Figure 11(a)),
• Category 2, with 30% < P < 50% which is more
prone to segmentation error (Figure 11(b)),
• Category 3, with P > 50% for which it is impos-
sible to perform a reliable segmentation (Figure
11(c)).
The percentage of occlusion was determined manu-
ally by selecting the end points of the occluded elliptic
arc. Note that the percentage of occlusion was com-
puted only to evaluate the segmentation procedure,
and this is not a part of the algorithm.
Table 1 shows the mean (µ) and the standard
deviation (σ) for D
meanR
and D
maxR
, for the images
belonging to category 1. Good results were ob-
tained even in the presence of occlusion by nearby
leaves/branches and tomatoes (Figures 12(a) and
12(b)). Also, a low µ
D
meanR
along with lower σ
D
meanR
demonstrates the robustness of the proposed method.
However, in some images captured at the beginning
of the season, when the size is very small, the
occlusion due to leaves present on the “head” of the
tomato results in an ambiguity on the position of the
actual contour (Figure 12(c)). Also, in some images
(Figure 12(d)), due to a shadow effect on a portion
of the contour, the intensity profile of the tomato
and the adjacent leaves are nearly identical, resulting
in a very low contrast. Such cases may result in
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
408
(a) Category 1: Tomato S = 1,
Image 8.
(b) Category 2: Tomato S = 7,
Image 17.
(c) Category 3: Tomato S = 2,
Image 14.
Figure 11: Three different categories of image based on the
occlusion.
comparatively high distance measures even in the
absence of any occlusion.
In the images of category 2, containing a sig-
nificant amount of occlusion, good results were
obtained on 44 % of the images (Figure 13), where
D
meanR
< 10%. For this category µ
D
meanR
lies in the
interval [2, 30]% for ellipse Ell
f 4
. The significantly
higher distance measure for some images of this
category is caused by the false detection of the
position of the tomato due to the occlusion. The
position of the tomatoes was not correctly detected
in approximately 6% of the images belonging to
category 2. Note that Ell
f 4
is not necessarily the best
ellipse, and is selected for illustrative purpose only.
Due to the variation in the contrast and occlusion,
in general, there is not a single ellipse (among the
four ellipse estimates) which represents a good
segmentation for all the images. Let us denote by
Ell
opt
the ellipse, among the four ellipse estimates
(Ell
f 1
, Ell
f 2
, Ell
f 3
and Ell
f 4
), for which µ
D
meanR
is
minimum. Table 2 shows the distribution of D
meanR
and D
maxR
for ellipse Ell
opt
. It can be observed that
the values of D
meanR
and D
maxR
for Ell
opt
are lower
than for those of Ell
f 4
. This shows that there is at
least one ellipse among the four ellipse estimates
which best represents the tomato. The operator has
only to select the best ellipse.
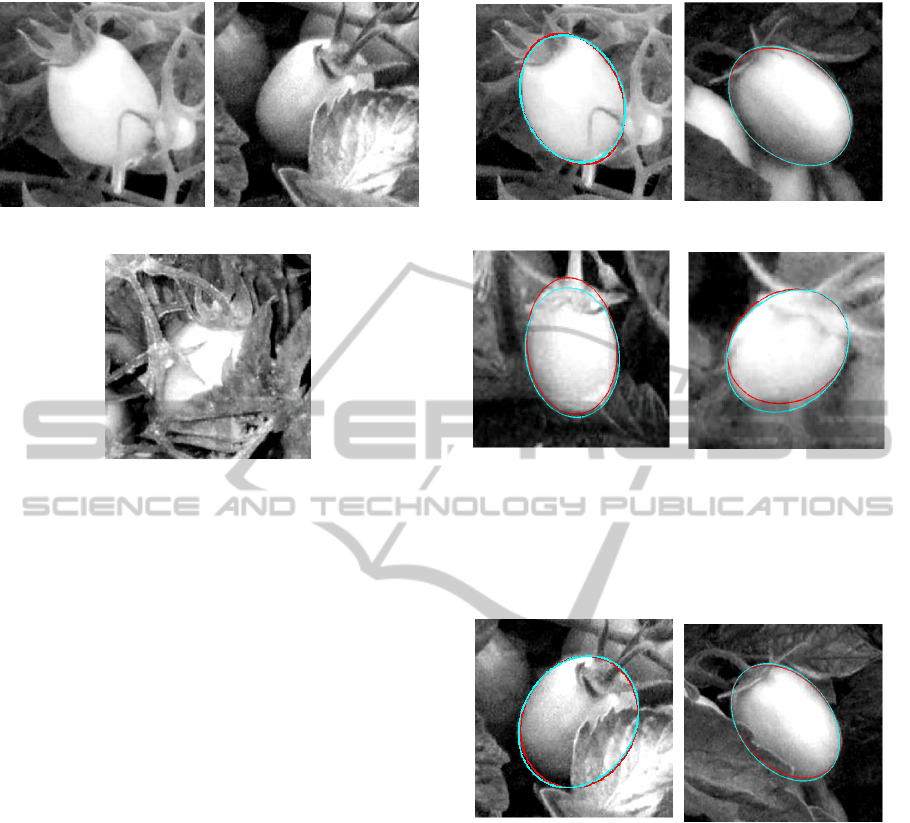
(a) Tomato S = 1, Image 8
(1.89%, 4.70%).
(b) Tomato S = 4, Image 24
(1.29%,4.39%).
(c) Tomato S = 5, Image 4
(4.71%, 11.84%).
(d) Tomato S = 8, Image 5
(4.77%, 16.04%).
Figure 12: Final segmentation Ell
f 4
(red) obtained on im-
ages of category 1. The contour in cyan represents the man-
ual segmentation. Also shown are the distance measures.
The values in brackets are (D
meanR
, D
maxR
).
(a) Tomato S = 7, Image 17
(1.94%, 5.45%).
(b) Tomato S = 4, Image 18
(2.22%,6.16%).
Figure 13: Final segmentation Ell
f 4
(red) obtained on im-
ages of category 2.
5 CONCLUSIONS
We presented a segmentation procedure used to
monitor tomatoes in images. Starting from an
approximate computation of the position of the center
of the tomato, segmentation algorithms based on
contour and region information are proposed and
combined, in order to determine a first estimate of the
contour. Then, a parametric active contour with shape
constraint is applied and four ellipse estimates repre-
senting the tomatoes are obtained. In all the steps of
this process, a priori knowledge about the shape and
Shape-basedSegmentationofTomatoesforAgricultureMonitoring
409

the size of the tomatoes is modeled and incorporated
as regularization terms, leading to better robustness.
It is supposed that the operator selects, at the end of
the process for each image, the ellipse correspond-
ing to the best elliptic estimation of the actual contour.
Table 1: Mean (µ) and standard deviation (σ) of D
meanR
and
D
maxR
by comparing ellipse Ell
f 4
with the manual segmen-
tation M. Only the images belonging to category 1 (i.e. with
a low amount of occlusion) have been considered.
N
1
S
µ
D
meanR
σ
D
meanR
µ
D
maxR
σ
D
maxR
S = 1 26 1.72 0.77 5.06 2.76
S = 2 4 1.85 0.46 5.45 1.91
S = 3 21 3.40 2.24 9.79 6.88
S = 4 14 2.73 1.92 7.81 5.71
S = 5 5 4.81 1.30 13.05 3.56
S = 6 0 - - - -
S = 7 25 1.88 0.65 4.81 1.97
S = 8 20 6.07 5.75 15.41 10.61
S = 9 1 5.26 0.00 11.86 0.00
S = 10 5 2.25 0.56 6.59 2.25
Table 2: Mean (µ) and standard deviation (σ) of D
meanR
and
D
maxR
by comparing ellipse Ell
opt
with the manual segmen-
tation M. Only the images belonging to category 1 (i.e. with
a low amount of occlusion) have been considered.
N
1
S
µ
D
meanR
σ
D
meanR
µ
D
maxR
σ
D
maxR
S = 1 26 1.34 0.68 3.76 2.21
S = 2 4 1.57 0.4 4.43 0.88
S = 3 21 2.87 2.05 8.4 6.58
S = 4 14 2.2 1.77 6.28 5.34
S = 5 5 4.54 1.14 12.44 3.46
S = 6 0 - - - -
S = 7 25 1.7 0.49 4.61 1.62
S = 8 20 5.4 4.88 14.9 10.37
S = 9 1 5.24 0 11.86 0
S = 10 5 1.75 0.36 4.4 1.25
The segmentation of tomatoes is a challenging
task due to the presence of occlusion and variation
in contrast. In order to evaluate the robustness of the
proposed algorithm, the entire image set was divided
into three categories based on the amount of occlu-
sion. For the images with an acceptable level of occlu-
sion, good results were obtained with an average vari-
ation in D
meanR
less than 6%. Also, the low standard
deviation for D
meanR
indicates the robustness of the
proposed algorithm. Good results with D
meanR
< 10%
were obtained on 44% of the images which contain a
significant amount of occlusion.
For the moment, it has been assumed that an oper-
ator manually selects one ellipse as the final segmen-
tation. In future work, we wish to provide automati-
cally the best representation of the tomato. Also, in
some images, the position of the tomato is not de-
tected correctly due to the presence of other toma-
toes nearby. This could be improved by updating the
position of the tomato globally by considering also
the movement of adjacent tomatoes. One possible
improvement for the active contour model is to re-
strict the size of the reference ellipse, as there is little
growth between two consecutive images.
ACKNOWLEDGEMENTS
This work is partially supported by European Re-
gional Development Fund (ERDF).
REFERENCES
Aggelopoulou, A., Bochtis, D., Fountas, S., Swain, K.,
Gemtos, T., and Nanos, G. (2011). Yield prediction
in apple orchards based on image processing. Journal
of Precision Agriculture, 12:448–456.
Aitkenhead, M., Dalgetty, I., Mullins, C., McDonald, A.,
and Strachan, N. (2003). Weed and crop discrimi-
nation using image analysis and artificial intelligence
methods. Computers and Electronics in Agriculture,
39(3):157 – 171.
Charmi, M., Ghorbel, F., and Derrode, S. (2009). Using
Fourier-based shape alignment to add geometric prior
to snakes. In ICASSP, pages 1209–1212.
Du, C. and Sun, D. (2006). Learning techniques used in
computer vision for food quality evaluation: a review.
Journal of Food Engineering, 72(1):39 – 55.
Fischler, A. and Bolles, C. (1981). Random sample consen-
sus: a paradigm for model fitting with applications to
image analysis and automated cartography. Commu-
nications of the ACM, 24(6):381–395.
Foulonneau, A., Charbonnier, P., and Heitz, F. (2006).
Affine-invariant geometric shape priors for region-
based active contours. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 28(8):1352–1357.
Jayas, D., Paliwal, J., and Visen, N. (2000). Review pa-
per (automation and emerging technologies): Multi-
layer neural networks for image analysis of agricul-
tural products. Journal of Agricultural Engineering
Research, 77(2):119 – 128.
Kass, M., Witkin, A., and Terzopoulos, D. (1988). Snakes:
Active contour models. International Journal of Com-
puter Vision, 1(4):321–331.
Lee, W. S., Slaughter, D. C., and Giles, D. K. (1999).
Robotic weed control system for tomatoes. Precision
Agriculture, 1:95–113.
Mkhabela, M., Bullock, P., Raj, S., Wang, S., and Yang,
Y. (2011). Crop yield forecasting on the Canadian
prairies using MODIS NDVI data. Agricultural and
Forest Meteorology, 151(3):385 – 393.
Narendra, V. G. and Hareesh, K. S. (2010). Prospects of
computer vision automated grading and sorting sys-
tems in agricultural and food products for quality eval-
uation. International Journal of Computer Applica-
tions, 1(4):1–9.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
410

Otsu, N. (1975). A threshold selection method from gray-
level histograms. Automatica, 11(285-296):23–27.
Prasad, A., Chai, L., Singh, R., and Kafatos, M. (2006).
Crop yield estimation model for Iowa using remote
sensing and surface parameters. International Jour-
nal of Applied Earth Observation and Geoinforma-
tion, 8(1):26 – 33.
Stajnko, D. and Cmelik, Z. (2005). Modelling of apple fruit
growth by application of image analysis. Agriculturae
Conspectus Scientificus, 70:59–64.
Xu, C. and Prince, J. (1998). Snakes, shapes, and gradient
vector flow. IEEE Transactions on Image Processing,
7(3):359–369.
Yang, C., Prasher, S., Landry, J., Ramaswamy, H., and Dit-
ommaso, A. (2000). Application of artificial neural
networks in image recognition and classification of
crop and weeds. Canadian Agricultural Engineering,
42(3):147 – 152.
Zhao, H. and Pei, Z. (2013). Crop growth monitoring
by integration of time series remote sensing imagery
and the WOFOST model. In 2013 Second Inter-
national Conference on Agro-Geoinformatics (Agro-
Geoinformatics), pages 568–571.
Shape-basedSegmentationofTomatoesforAgricultureMonitoring
411
