
3D Shape Retrieval using Uncertain Semantic Query
A Preliminary Study
Hattoibe Aboubacar
1,2
, Vincent Barra
1,2
and Ga
¨
elle Loosli
1,2
1
Clermont Universit
´
e, Universit
´
e Blaise Pascal, LIMOS, BP 10448, F-63000, Clermont-Ferrand, France
2
CNRS, UMR 6158, Limos, F-63171 Aubiere, France
Keywords:
3D Shape Retrieval, Uncertainty Coding, Semantic Query, SimpleMKL, SVDD.
Abstract:
The recent technological progress contributes to a huge increase of 3D models available in digital forms.
Numerous applications were developed to deal with this amount of information, especially for 3D shape
retrieval. One of the main issues is to break the semantic gap between shapes desired by users and shapes
returned by retrieval methods. In this paper, we propose an algorithm to address this issue. First the user gives
a semantic request. Second, a fuzzy 3D-shape generator sketches out suitable 3D-shapes. Those shapes are
filtered by the user or a learning machine to select the ones that match the semantic query. Then, we use a
state-of-the-art retrieval method to return real-world 3D shapes that match this semantic query. This algorithm
is used to retrieve object in SHREC’07 database. The results are good and promising.
1 INTRODUCTION
With the technological progress in computer graphics
and object modeling, the number of available 3D data
has grown exponentially. It makes it essential to de-
velop effective methods and elegant modeling, analy-
sis and processing tools to allow a better understand-
ing of the phenomena involved and the interpretation
of data.
The proposed work is closely linked to the 3D-
shape retrieval problem, even though it doesn’t pro-
pose a novel algorithm for this task (examples of
retrieval methods can be found in (Tangelder and
Veltkamp, 2008) and a brief description is given in
section 3 ). Indeed, the target problem deals with the
request that is given to any retrieval machine. Usually,
this request is a 3D-shape and we propose here to start
from a (textual) semantic request and help the user to
obtain a 3D-shape that will be given to the retrieval
machine.
In the next section, the black box between the re-
quest and the generated 3D-shape is detailed. Section
3 reviews the related work. Then, we detail the differ-
ent tools used in our process in section 4. In section 5
we introduce some experiments. At last, some points
are explained and discussed in section 6.
2 FROM THE SEMANTIC
REQUEST TO A SUITABLE
SYNTHETIC 3D-SHAPE
As mentioned above, the objective is to provide a tool
that goes from a semantic request to a 3D-shape suit-
able to be an input for retrieval.
Semantic Request. This requires to define what
will be considered as a semantic request : it is re-
stricted to the association of a noun (the class) and
an adjective (the concept). For this study, the nouns
are limited to a set of known classes (although future
work is planned to extend this) and the concept is free.
Suitable 3D-shape. Let’s now define what a suit-
able 3D-shape is. Since we will use a retrieval ma-
chine based on Reeb graphs that are extracted from
the 3D-shape, we consider that texture or details are
meaningless and that the general shape and position
are sufficient to define the semantic request. A suit-
able 3D shape will be a shape composed of very sim-
ple geometrical parts (like balls, cylinders, parallelo-
grams) that looks like what the user meant.
Process. It is obviously not easy or even possible
to define all concepts a priori. The choice here is to
ask the user, as in retrieval feedback processes, to give
600
Aboubacar H., Barra V. and Loosli G..
3D Shape Retrieval using Uncertain Semantic Query - A Preliminary Study.
DOI: 10.5220/0004819106000607
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 600-607
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
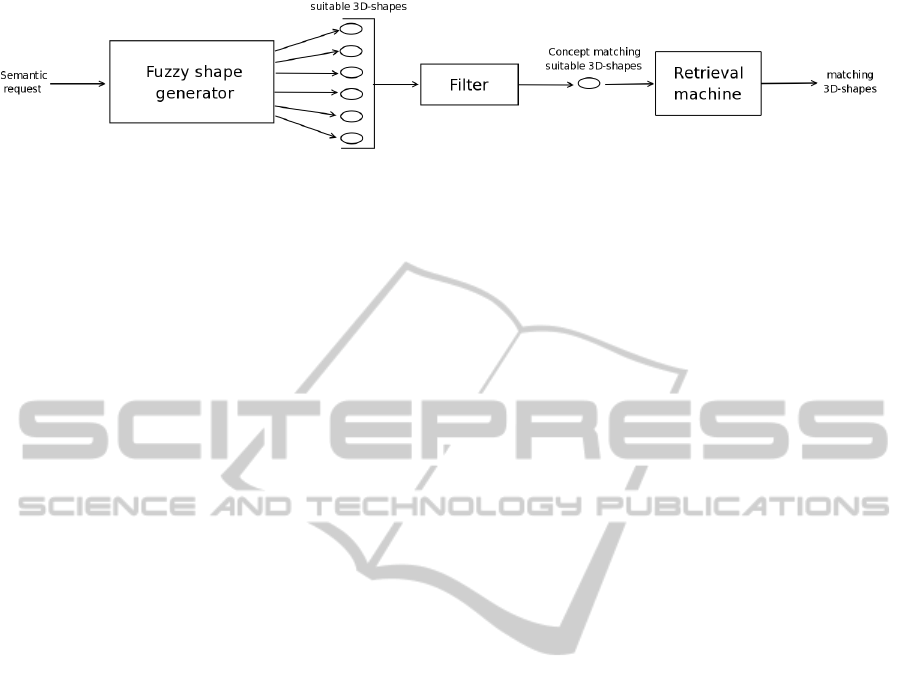
Figure 1: Overview - we propose a process to go from a semantic request to a suitable 3D-shape that can be used in a retrieval
machine in order to retrive 3D-shapes matching the semantic request. We present a way to generate suitable 3D-shapes and
examples of machine filter.
precision on his request by selecting matching shapes
when a concept is unknown. The idea is to generate
several instances of the classes, based on several un-
certainties in the definition of the class (see section
4.1). This is the first contribution of this paper. Then,
a filter is applied, in order to keep only instances of
the desired concept. This is the second contribution.
This filter takes two forms: the human one (manual
selection of the generated shapes that match the con-
cept) and the trained machine one (trained using pre-
viously selected shapes). The basic process is that the
human filtering is required for any unknown concept
and used to train the machine one. If a reliable filter
has been trained for a concept, the human intervention
is not required anymore.
Figure 1 gives an overview of our process.
Tools and Open Questions. To implement our pro-
cess, we need to evaluate several points:
• the trained machine filter : since we’ll get only
good instances, we focus on one-class learning
methods (here we present results for SVDD and
SimpleMKL with One-class SVM) : see section
4.2 for details on the methods.
• the reliability of the machine filter : the question
here is to evaluate the number of good instances
that are necessary to train the filter (see experi-
ment in section 6).
• how good are the generated 3D-shape to retrieve
concept matching real 3D-shapes using a retrieval
machine : see section 5.
3 RELATED WORK
Breaking the semantic gap between users and ma-
chines has been the subject of a huge amount of works
in CAD and computer graphics in general. A brief re-
view of state-of-art methods in reducing the semantic
gap is given in (Han et al., 2008).
Recently, (Eitz et al., 2012) made a great contribu-
tion towards human’s way of seeing images. It helped
them to develop a powerful method to retrieve shape
from sketch. It is an interesting way of dealing with
uncertainty as sketches are a personal simplification
of the way we see objects. We aim at developing a
tool that allows user to sketch out the 3D shape they
want like in the approach of (Eitz et al., 2012), more-
over we want to be able to retrieve not only objects of
the same class but shapes in a specified posture.
In this paper, we are mainly inspired by shape
content-based methods. The recent progress made
in this field is the introduction of relevance feedback
methods. The idea behind relevance feedback is to ap-
proach the user’s query by allowing him to specify it
several times. In practice, the user gives his request.
Then first objects that best match the query are dis-
played. Hence the user can state the ones he wants
and those which are wrong. These choices may be
reused to be more accurate on the retrieval process.
Therefore based on the iterative feedback of the user
better results can be obtained. (Giorgi et al., 2010)
proposed a relevance feedback method based on the
assumption that similarity may emerge from the in-
hibition of differences. In this approach, objects that
are wrong according to the user are not integrated in
the new retrieval process. (Zhang and Jin, 2010) used
a learning technique to learn through the different re-
sponses of the user. This technique used a Gaussian
kernel coupled with a method of gradient descent to
improve the learning step. The results were very en-
couraging as these of (Giorgi et al., 2010).
Moreover, CAD-oriented works gradually and in-
directly integrated uncertainty in the modeling of 3D
shapes. (Funkhouser et al., 2004) was one of the first
to propose the construction of models based on other
existing models. Several algorithms for handling 3D
shapes have been developed in this work including
smart scissors which allow the user to easily separate
parts of 3D shapes and paste one part to another using
an efficient paste tool. The results are really remark-
able and let the user play with his imagination. How-
ever, despite of a shape search module, the user must
do a great job to find all forms of possible parts of ob-
jects. More recently (Chaudhuri et al., 2011) provides
an effective response to this problem. The different
parts of 3D shapes are automatically segmented and
3DShapeRetrievalusingUncertainSemanticQuery-APreliminaryStudy
601

classified as primitives in a relevant way according to
position, size and other parameters. In addition, as
the user manually creates a model, the method pro-
vides the user with primitives sorted by relevance se-
mantics, from most relevant to least relevant, step by
step. This work is subject to an automatic extension
in (Kalogerakis et al., 2012), where 3D shapes are au-
tomatically synthesized using existing shapes and a
probabilistic learning model. Experimental creation
of planes, cars and boats have been made and the re-
sults are mind-blowing. Furthermore, the method al-
lows different kinds of imaginable objects for each
class to be computed and there is a great time saving
as thousand of possible realistic models are created in
a few minutes. It is a powerful tool, but the user still
has to look at several models to find what he wants.
The process proposed in this paper is a comple-
mentary approach to that ones. Most of the time peo-
ple does not think of one object but different possible
objects. We think that trying to model the requested
object from simple part before searching for real ob-
jects will help pass the hurdle. Our main intention is
to explicitly deal with uncertainties in modeling, cod-
ing and processing. Thus, we will be able not only to
design objects but ideas.
So far, there has not been yet a black box that cap-
tures the semantic request of a user and returns ex-
actly what he wants. Our purpose is to provide tools
to help taking a step towards this black box.
4 PROCESS DEPLOYEMENT
We introduce here all the different tools that are used,
from 3D-shape modeling to the retrieval method, in-
cluding a brief description of the one-class learning
methods.
4.1 Modeling Process
We consider that most of 3D shapes can be robustly
segmented. This brings the idea that a shape is a com-
bination of several simple shapes joined according to
some rules. Therefore, we model 3D shapes as a com-
bination of simple shapes we call primitives. In order
to introduce some uncertainties, these primitives can
be altered by pattern maker called modifiers, before
being pieced together according to random spatial re-
lations. Doing this, we are able to design all possible
postures of the same object. As a result, we create a
fast and flexible 3D shapes generator which randomly
produces uncertain shapes allowing the user to select
the ones that correspond to his semantic query.
Here, we choose to model a simple manufactured
class of objects: chair in section 4.1.1, and a more
complex one: humanoid in section 4.1.2. To model
these uncertain 3D shapes we use four primitives
which are spheres, cylinders, parallelograms and el-
lipsoids. One has to note that our 3D models are quite
simple and do not satisfy all real constraints inherent
to each object. However, this is not annoying in our
case because we want to learn semantic concepts and
we assess that our semantic concepts only embed re-
alistic models so our methods have to be robust with
unrealistic ones.
4.1.1 Design of a Generic Chair
A chair is modeled as a combination of three prim-
itives representing the back, the chair seat and the
feet. We assume the feet are symmetrical and have
the same characteristics, therefore only information
on one foot is needed. Otherwise, we consider only
two kind of primitives in our chair modeling process
which are cylinder and parallelogram. Indeed, the
back, the chair seat and the feet are each one indepen-
dently from the other a cylinder or a parallelogram.
In addition, characteristics of cylinder and parallelo-
gram are randomly defined. Of course, we include
in our implementation some constraints to ensure that
our uncertain chairs are like realistic ones. These con-
straints ensure that primitives do not have abnormal
size according to realistic characteristics of a chair.
This is made using uniform distribution to draw the
sizes under specified bounds. Furthermore, we make
sure the back is linked with the chair seat and the feet
are located below the chair seat. Then we randomly
select angles to fix the orientation between the primi-
tives.
Figure 2 shows some examples of designed chairs.
Figure 2: Examples of designed chairs.
4.1.2 Design of a Generic Humanoid
Humanoid are modeled using eleven body parts mod-
eled as primitives: two arms, two forearms, two
thighs, two legs, one chest, one neck and a head. We
choose to model limbs and neck as cylinders, head
as sphere and chest as ellipsoids. Quite naturally, the
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
602
motion of each limb is independent of other limbs.
As for chairs, the characteristics of primitives are set
up randomly to bring some size uncertainties. We
start modeling a humanoid from the chest which is
always vertical. Then we add neck and head which
do not need to be oriented, so we just fix neck to
chest and head to neck. We add limbs and orient
each one independently which allows to obtain ran-
dom postures. Furthermore, we ensure that corre-
sponding limbs have the same characteristics as for
realistic humanoid, and we enable independent orien-
tation from one to another.
Figure 3 shows an example of designed humanoid.
Figure 3: Example of designed humanoid.
4.1.3 Suitable 3D-shape Features
Each suitable 3D-shape is represented by its features
in the learning process. The features of a suitable 3D-
shape is the set of features of the primitives the shape
is composed of, plus angles between primitives. A
primitive is characterized by its type of shape and its
size. Thus, there are sixteen features for a chair and
forty four for an humanoid. Then, an harmonization
step is performed in order to have the same number of
features for each kind of shape in the data. It consists
in repeating information on primitive in each model
as much as needed to have the same number of prim-
itives in both. After this step we then worked with
a hundred and sixteen features for each shape. These
features were the inputs used in our learning methods.
4.2 Learning Semantic Concept:
Creating a Machine Filter
Learning a semantic concept from a sample of 3D-
shapes is equivalent to learning the characteristics of
objects supposed to belong to the same class. It is
a standard problem in machine learning called one-
class classification problem also known as problem
of data description. We refer to (Khan and Madden,
2009) to have a glimpse at recent one class classifi-
cation methods. We investigated two methods which
address this problem in order to create a machine fil-
ter.
Here, we choose to use only Support Vector Ma-
chine (SVM) based methods. SVM-based methodol-
ogy for one class classification was first introduced by
(Schlkopf and Smola, 2001). Schlkopf’s approach is
to find an separation hyperplane between targets and
outliers. This is the most widely used approach in the
literature. We also concentrate here on another ap-
proach, proposed in (Tax and Duin, 2004), called Sup-
port Vector Data Description (SVDD). This method
aims to find a hypersphere which contains all possible
targets. This approach has proved to be efficient and
SVDD is part of top methods when it comes to one-
class classification. SVDD is detailed in section 4.2.1
and SimpleMKL in section 4.2.2.
When a user asks for a semantic concept. First,
he has to choose manually a sample of suitable 3D-
shapes that match his query. This sample is learned
and saved using a learning method. Hence, the next
time the same concept is asked, we use our fuzzy
shape generator to produce several shapes. Then the
same learning method is used to determine which
shapes belong to this concept. The best matching
shapes are the filtered suitable 3D-shapes.
4.2.1 SVDD
SVDD (Tax and Duin, 2004), solves a multidimen-
sional outlier detection problem. The aim here is
not to estimate a probability density like in standard
methods, but rather to construct a spherically shaped
boundary around the target set. Hence, the following
optimization problem is solved:
Minimize R
2
+C
∑
i
ξ
i
subject to k x
i
− a k
2
≤ R
2
+ ξ
i
, ξ
i
≥ 0 ∀i
(1)
Where x
i
are the targets, R is the radius of the spher-
ically shapes boundary, ξ
i
are slack variables and C
controls the trade-off between the volumes and the er-
rors.
One of the advantages of this method is that it
allows the possibility of outliers in the training set.
Then the optimization is modified as explained in
(Tax and Duin, 2004). However, it still well performs.
Furthermore, it is really flexible as one can choose to
use his kernel function instead of the inner product
used by default.
4.2.2 SimpleMKL
SimpleMKL is a Multiple Kernel Learning (MKL)
method introduced by (Rakotomamonjy et al., 2008).
MKL was first introduced in (Lanckriet et al., 2004),
then it was subject to enhancements, extensions and
algorithms to solve the problem in (Bach et al., 2004;
Sonnenburg et al., 2006), before (Rakotomamonjy
et al., 2008) propose a new formulation and a new
algorithm. SimpleMKL uses the same approach as
3DShapeRetrievalusingUncertainSemanticQuery-APreliminaryStudy
603

traditional SVM but instead of looking for only one
kernel it looks for several kernels and linear combi-
nations of these kernels then finds the best one and
optimizes it.
The idea behind MKL as summarized in (Rako-
tomamonjy et al., 2008) is to look for a different so-
lution of the learning problem. Indeed in one class
learning problem the solution is of the form
f (x) =
l
∑
i=1
α
∗
i
K(x, x
i
) (2)
where α
∗
i
are some coefficients to be learned from ex-
amples x
i
and K(., .) is a given definite kernel associ-
ated with a reproducing kernel Hilbert space (RKHS),
H. (Lanckriet et al., 2004) proposed to consider the
kernel K(., .) as a convex combination of basis kernels
K(x, y) =
M
∑
m=1
d
m
K
m
(x, y)
with d
m
≥ 0,
M
∑
m=1
d
m
= 1
(3)
where M is the total number of kernels, K
m
, which are
classical kernels. Hence, MKL is learning both the
coefficients α
∗
i
and d
m
in a single optimization prob-
lem. To work out this problem, and following (Rako-
tomamonjy et al., 2008) that claims that their method
can be extended to a one-class problem, we used the
following extension of SimpleMKL:
Minimize
{ f
m
},ξ
i
,d
m
,ρ
1
2
∑
m
1
d
m
k f
m
k
2
H
m
+
1
νn
n
∑
i
ξ
i
− ρ
subject to
∑
m
f
m
(x
i
) ≥ ρ − ξ
i
, ∀i,
ξ
i
≥ 0, ∀i,
∑
m
d
m
= 1, d
m
≥ 0, ∀m,
(4)
where n is the number of examples and ν the error
allowed. H
m
are the RKHS associated to each K
m
(., .)
and each function f
m
belongs to a different H
m
. It is
assumed that one looks for a decision function of the
form f (x) =
∑
m
f
m
(x).
4.3 Retrieval
After learning the semantic concept, we retrieve real-
world shapes that match this semantic concept using
our designed suitable shapes. Here we introduce the
method we use to retrieve real world 3D-shapes.
We perform retrieval with a recent unsupervised
method for 3D retrieval using Kernels on Extended
Reeb Graphs from (Barra and Biasotti, 2013). This
method used some real functions to perform differ-
ent Extended Reeb Graphs (ERG) of each 3D model.
This family of Extended Reeb Graphs is considered as
the graph representation of those 3D models. Hence,
in order to assess similarity of 3D models, a Gaus-
sian kernel similarity measure is defined on the set of
graphs. The measure is based on a representation of
graphs in terms of bag of shortest paths with bounded
maximal length. It is used to determine similarity be-
tween ERG of the same real function. Therefore, the
r nearest neighbors of a query 3D-shape, where r is an
integer, can be computed according to the ERG simi-
larity of each real function. Then, an aggregated func-
tion is used to sum up the outcomes for each real func-
tions and solve the 3D retrieval problem, that is to say
giving the overall r nearest neighbors. This method
has been compared with state-of-the-art methods and
performs very well, as most of the time it outperforms
reference methods. We refer to (Biasotti et al., 2008)
for Extended Reeb Graphs.
This method is the one we use to run experiments
presented in this article.
5 EXPERIMENTS
In this section, we investigate how our process can be
useful to retrieve semantic concept. Doing this, we
learned three concepts (Figure 4) which correspond
to the following semantic requests:
• high chair: chair with a seat raised at a fair dis-
tance from the ground or with high feet length.
• low chair: chair with small feet length.
• stand up humanoid (stand hum).
Figure 4: Examples of high chair, low chair and stand hum.
Then we used our algorithm to retrieve match-
ing shapes in the database of the watertight track of
the Shape Contest SHREC’07 (Giorgi et al., 2007).
We give details of the comparison between our three
learning methods in section 5.1. Section 5.2 gives
some examples of designed shapes, afterwards re-
trieval outputs are detailed in section 5.3.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
604
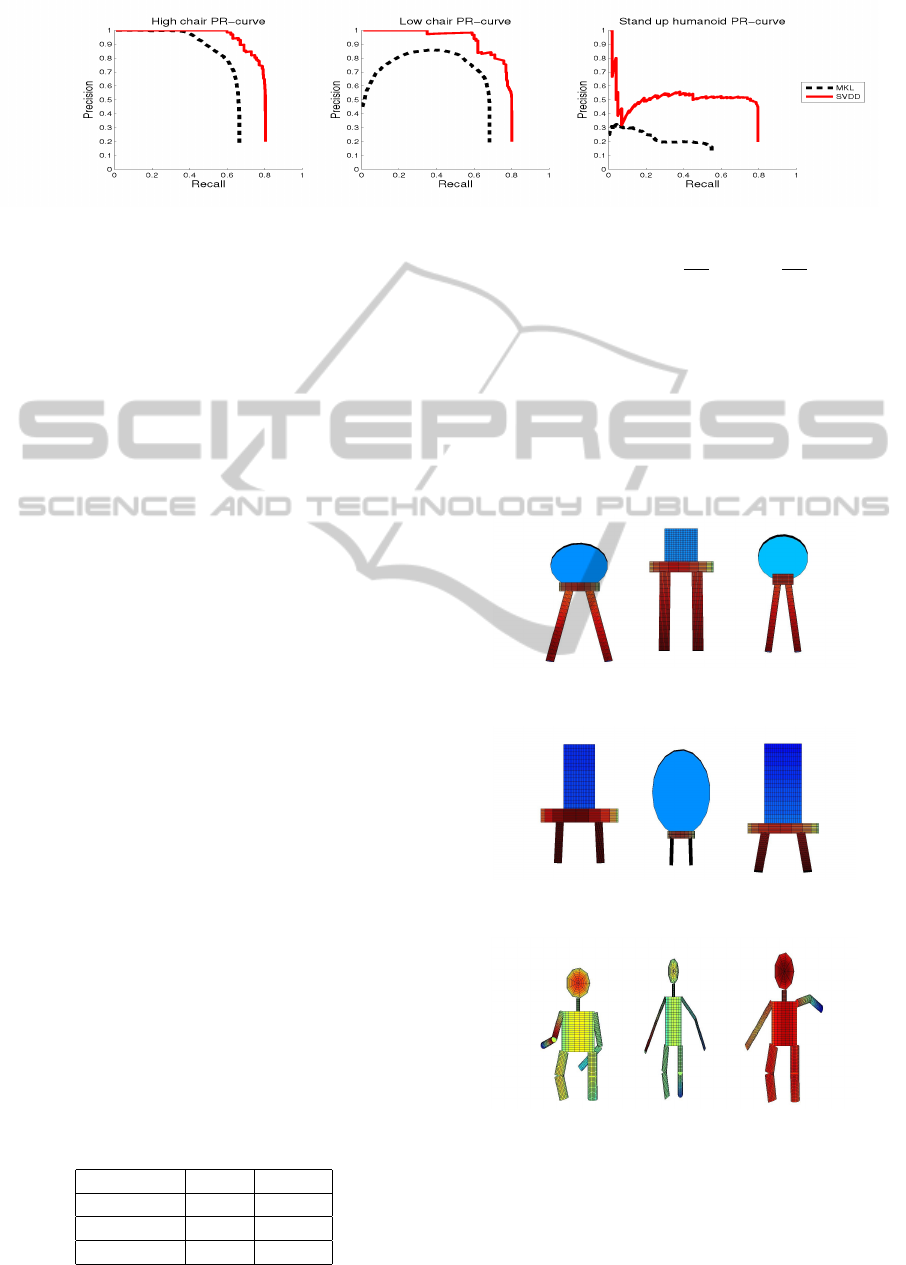
Figure 5: Precision/Recall graphs for each concept. Precision is the fraction of relevant retrieved objects to a given query, and
recall is the fraction of relevant objects which have been retrieved from the database. If O is the set of relevant objects to the
query, A is the set of objects retrieved, O
A
is the set of relevant objects in the result set then P =
|OA|
|A|
and R =
|OA|
|O|
.
5.1 Choice of the Learning Method
In order to test our algorithm, we compared the learn-
ing methods presented in section 4.2 to choose the
best one to learn our semantic concepts. A cross vali-
dation was performed to determine which parameters
were the best for each learning method. We worked
with a training dataset of a hundred of shapes of each
concept: stand up humanoids, low chairs and high
chairs. The test dataset was composed of a hundred
of instances of each concept and one hundred shapes
of non stand up humanoids.
We assumed that a standard user will provide
at most five instances representing the concept he
wants to be learned. Therefore, for each concept we
randomly partitioned our training data into twenty
subsamples of five instances. Then, we repeatedly
learned each subsample and test our precision using
the remaining subsamples.
We only mention here the average error obtained
for each method. Figure 5 shows the precision and
recall graphs for each concept. SVDD has the best
precision recall curves. It outperforms SimpleMKL
for the three concepts. SimpleMKL performs well for
both chair concepts but give poor performances for
the stand up humanoid concept.
Table 1 summarizes the overall precision on the
testing database. SVDD has the lowest error for high
chair and stand up humanoid concepts. However,
SimpleMKL is the best for the low chair concept.
Both methods have approximately the same error for
chair concepts but SVDD outperforms SimpleMKL
for the humanoid concept.
Hence, based on these observations, we chose to
use SVDD as our method to learn semantic concept.
Table 1: Percentage errors for each concept.
Concept MKL SVDD
High chair 12.58 12.29
Low chair 13.43 13.46
Stand hum 39.70 23.11
5.2 Suitable 3D-shapes
SVDD was run to select the three best matching ob-
jects from a random dataset of two hundred chairs and
two hundred humanoids for each of our three con-
cepts. Figure 6 shows the first three selected high
chairs, figures 7 and 8 the first three selected shapes
for respectively low chairs and stand hum.
Figure 6: Examples of first three selected high chairs
(ranked from left to right).
Figure 7: Examples of first three selected low chairs (ranked
from left to right).
Figure 8: Examples of first three selected stand hum (ranked
from left to right).
The outcomes are good according to what we ex-
pected. These shapes are used to retrieved object in
the next section.
3DShapeRetrievalusingUncertainSemanticQuery-APreliminaryStudy
605
5.3 Retrieval Outputs
We did a retrieval in SHREC’07 database with the
method of (Barra and Biasotti, 2013) to see what we
can get from a thorough database with our designed
shapes. We chose SHREC’07 (Giorgi et al., 2007) be-
cause it is a 3D-shape database which was manually
established with enough variation in order to evalu-
ate the effectiveness of 3D-shape retrieval algorithms.
The collection is composed of 400 mesh models, sub-
divided into 20 classes of 20 elements each.
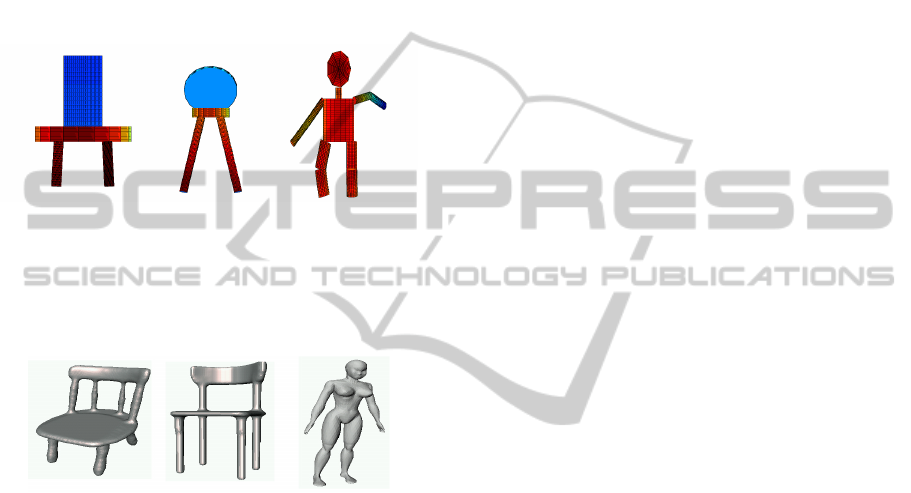
Figure 9: Instances used to retrieve 3D-shapes in
SHREC’07.
The three shapes showed in Figure 9 were the
one used to retrieve 3d-shapes. Figure 10 shows the
first retrieved shapes for each concept. The retrieved
Figure 10: The first retrieved shapes for each concept.
shapes are on the top shapes we expected to have in
our first retrieved one. This shows arguably that we
can connect our suitable 3D-shapes with state-of-the-
art designed one.
6 DISCUSSION
This paper presents results of a prototype phase. The
learning and retrieval methods used were chosen not
only because they are widely used in the literature and
perform very well but also because they are easy and
fast to implement. Readers can feel free to replace
those methods by methods of their choice.
Similarly, here only chairs and humanoids are
modeled but new objects can be added quickly be-
cause our method does not require thorough models.
Moreover, we said that we used five learning ex-
amples to build our filter because we thought that a
user will arguably select at least five elements. How-
ever, there is another reason: we ran some experi-
ments to know with how many learning examples we
were able to build a reliable machine filter. Hence, we
splitted up our learning database of one hundred ex-
amples in several set of the same number starting by
set of one element to set of 50 elements. These pro-
cess was done for each concept. Then, we did a cross
validation for each set to determine the best parame-
ters to use to learn with according to the number of
element in the set. The same test data used in section
5 has been used to perform tests and we gathered the
average learning error obtained for each number of
learning examples. This was repeated for each con-
cept and each learning method. Figure 11 shows the
average test error according to the number of learn-
ing examples used to build the machine filter. The
results show that we are able to build a reliable filter
with less than five learning examples for each concept
but the number of learning examples that performs the
best depends on the learned concepts and the learning
method used. For instance, when learning the high
chair concept, SVDD has better performances with 30
learning examples and SimpleMKL with 10 learning
examples. However, If we look at the error obtained
when learning with less than five elements, the best
performances are obtained when learning with three
or five elements. We chose to learn with five exam-
ples but one may prefer to learn with only three.
Another issue is the number of semantic requests
presented. This choice has been driven by the large
degree of freedom of our generator. The probability
to get shapes matching the concept the user wants is
really low, even if we already know which class of ob-
ject he wants, there are thousand of possible postures.
One of our futur work is to develop a tool that allows
the users to specify what he wants without choosing
between thousand of models. However, theoreticaly
user who wants to ask for 3D-shapes representing a
new semantic request just needs to select a sample of
3D-shapes. Then those shapes are processed and ana-
lyzed as explained in the former section.
7 CONCLUSIONS
An algorithm to generate suitable 3D-shapes corre-
sponding to a specific semantic concept is proposed
in this article. The principle is to allow the user to
specify his semantic query by selecting representing
3D-shapes designed by a 3D-shapes generator that in-
tegrates a part of randomness, enabling to explore the
uncertainty characteristic of such a request. The con-
cept behind the selected shapes is learned to create
automatic filters for future usage and used to retrieve
shapes in SHREC’07 database.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
606
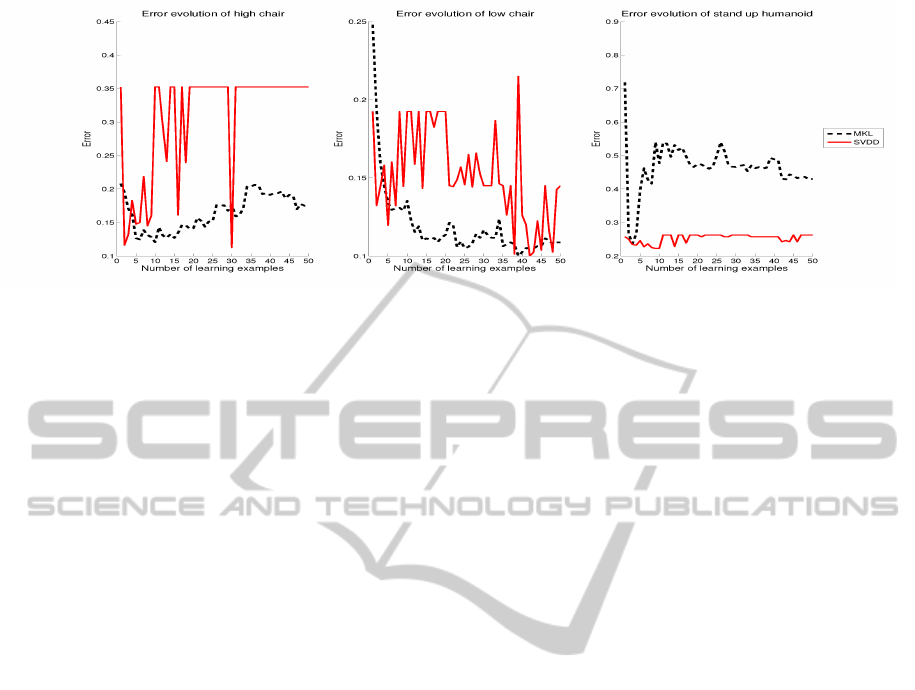
Figure 11: Evolution of the test error according to the number of learning examples used to build the machine filter.
We plan to make numerous improvements in our
work. We are currently working on a method allow-
ing the user to more easily select suitable shapes for
concept matching. Moreover, we hope to run directly
our algorithms to retrieve uncertain shapes.
REFERENCES
Bach, F., Lanckriet, G. R. G., and Jordan, M. I. (2004).
Multiple kernel learning, conic duality, and the smo
algorithm. In Proceedings of the twenty-first inter-
national conference on Machine learning, ICML ’04,
New York, NY, USA. ACM.
Barra, V. and Biasotti, S. (2013). 3d shape retrieval using
kernels on extended reeb graphs. Pattern Recognition.
Biasotti, S., Floriani, L. D., Falcidieno, B., Frosini, P.,
Giorgi, D., Landi, C., L.Papaleo, and Spagnuolo, M.
(2008). Describing shapes by geometrical-topological
properties of real functions. Computing Surveys,
40(4). In: Computing Surveys, vol. 40 (4) ACM,
2008.
Chaudhuri, S., Kalogerakis, E., Guibas, L., and Koltun, V.
(2011). Probabilistic reasoning for assembly-based
3d modeling. ACM Transactions on Graphics (Proc.
SIGGRAPH), 30(4).
Eitz, M., Hays, J., and Alexa, M. (2012). How do humans
sketch objects? ACM Transactions on Graphics (Pro-
ceedings SIGGRAPH), 31(4):44:1–44:10.
Funkhouser, T., Kazhdan, M., Shilane, P., Min, P., Kiefer,
W., Tal, A., Rusinkiewicz, S., and Dobkin, D. (2004).
Modeling by example. ACM Transactions on Graph-
ics (Proc. SIGGRAPH).
Giorgi, D., Biasotti, S., and Paraboschi, L. (2007). Water-
tight models track. Research report, IMATI, Genova,
Italy.
Giorgi, D., Frosini, P., Spagnuolo, M., and Falcidieno, B.
(2010). 3d relevance feedback via multilevel rele-
vance judgements. Vis. Comput., 26(10):1321–1338.
Han, D., W., and Li, Z. (2008). Semantic image classi-
fication using statistical local spatial relations model.
Multimedia Tools and Applications, 39(2):169–188.
Kalogerakis, E., Chaudhuri, S., Koller, D., and Koltun, V.
(2012). A probabilistic model of component-based
shape synthesis. ACM Transactions on Graphics,
31(4).
Khan, S. S. and Madden, M. G. (2009). A survey of recent
trends in one class classification. In Artificial Intelli-
gence and Cognitive Science, pages 181–190.
Lanckriet, G. R. G., Cristianini, N., Bartlett, P., Ghaoui,
L. E., and Jordan, M. I. (2004). Learning the ker-
nel matrix with semidefinite programming. Journal of
Machine Learning Research, 5:27–72.
Rakotomamonjy, A., Bach, F., Canu, S., and Grandvalet,
Y. (2008). Simplemkl. Journal of Machine Learning
Research.
Schlkopf, B. and Smola, A. J. (2001). Learning with Ker-
nels: Support Vector Machines, Regularization, Opti-
mization, and Beyond. MIT Press, Cambridge, MA,
USA.
Sonnenburg, S., Rtsch, G., Schfer, C., and Schlkopf, B.
(2006). Large scale multiple kernel learning. Jour-
nal of Machine Learning Research, 7:1531–1565.
Tangelder, J. W. H. and Veltkamp, R. C. (2008). A survey of
content based 3d shape retrieval methods. Multimedia
Tools and Applications, 39(3):441–471.
Tax, D. M. J. and Duin, R. P. W. (2004). Support vector data
description. Machine Learning, 54(1):45–66.
Zhang, Z. and Jin, J. (2010). Fuzzy relevance feedback in
content-based 3d model retrieval. In Proceedings of
the seventh international conference on Fuzzy Systems
and Knowledge Discovery, pages 565–568.
3DShapeRetrievalusingUncertainSemanticQuery-APreliminaryStudy
607
