
A Robot Waiter that Predicts Events
by High-level Scene Interpretation
Jos Lehmann
1
, Bernd Neumann
1
, Wilfried Bohlken
2
and Lothar Hotz
2
1
Cognitive Systems Laboratory, Department of Informatics, University of Hamburg, Hamburg, Germany
2
HITeC e.V., University of Hamburg, Hamburg, Germany
Keywords:
Prediction, Ontology, High-level Robotics.
Abstract:
Being able to predict events and occurrences which may arise from a current situation is a desirable capability
of an intelligent agent. In this paper, we show that a high-level scene interpretation system, implemented as
part of a comprehensive robotic system in the RACE project, can also be used for prediction. This way, the
robot can foresee possible developments of the environment and the effect they may have on its activities. As
a guiding example, we consider a robot acting as a waiter in a restaurant and the task of predicting possible
occurrences and courses of action, e.g. when serving a coffee to a guest. Our approach requires that the robot
possesses conceptual knowledge about occurrences in the restaurant and its own activities, represented in the
standardized ontology language OWL and augmented by constraints using SWRL. Conceptual knowledge
may be acquired by conceptualizing experiences collected in the robot’s memory. Predictions are generated
by a model-construction process which seeks to explain evidence as parts of such conceptual knowledge, this
way generating possible future developments. The experimental results show, among others, the prediction of
possible obstacle situations and their effect on the robot actions and estimated execution times.
1 INTRODUCTION
The ability to look ahead and anticipate possible de-
velopments and events can be a valuable asset for
robotic systems. By prediction, a service robot may
provide timely assistance to elderly persons, antici-
pating their needs. A driver assistance system may
brake when perceiving a rolling ball even before a
child following the ball is visible. Robots seeking an
obstacle-free path may anticipate the movements of
persons crossing their way. There are several method-
ological approaches for realizing predictive power in
robots, which will be discussed in the related-work
section of this paper. Our approach is new in at
least three respects. Firstly, it is based on an ontol-
ogy with occurrence concepts which may be obtained
by conceptualizing experiences. Secondly, predic-
tions are performed by the same scene interpretation
system which also recognizes occurrences actually
happening in a scene. Thirdly, the knowledge rep-
resentation framework connects high-level symbolic
concepts with quantitative properties and elementary
robot actions.
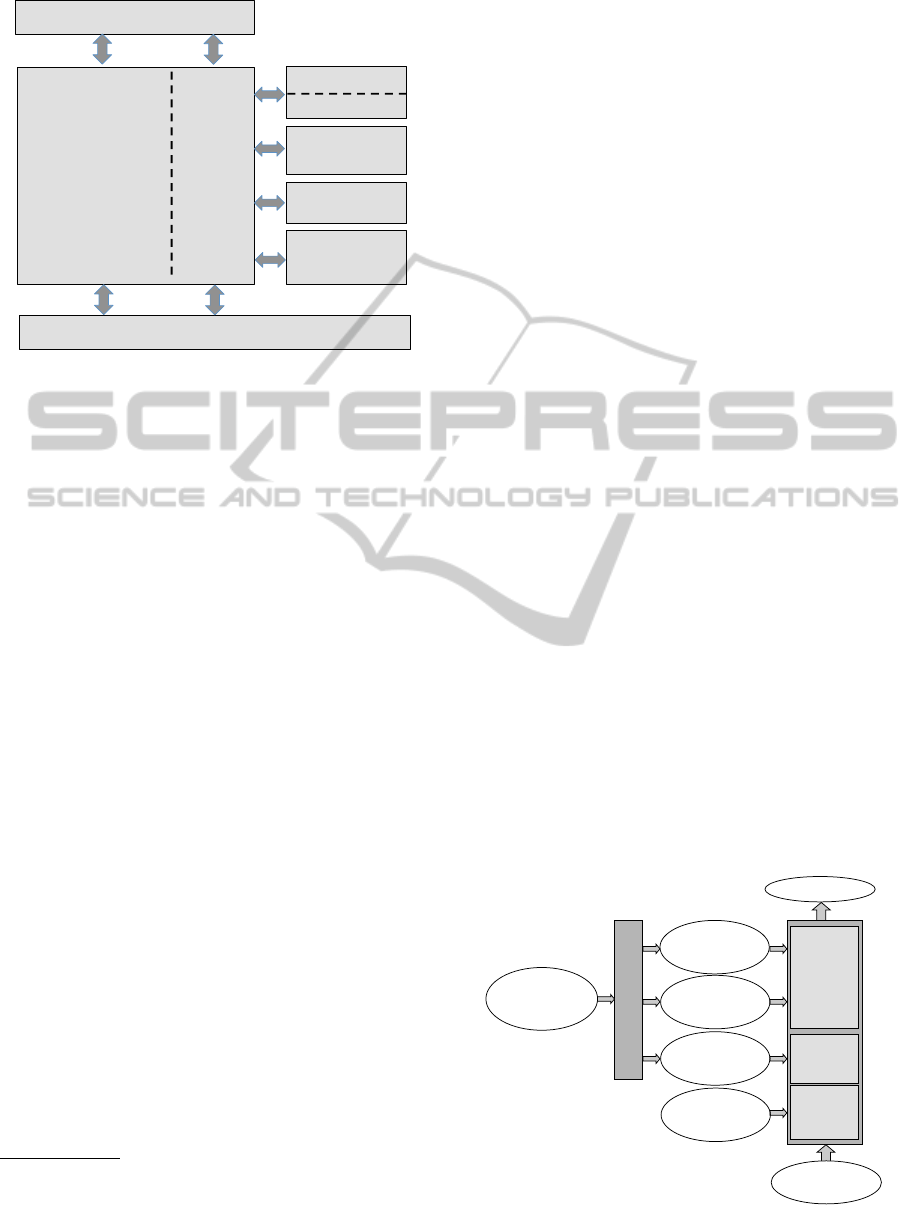
Our work is part of the project RACE (for Robust-
ness by Autonomous Competence Enhancement) fea-
turing a robot which learns from experiences. The
RACE architecture, shown in Figure 1, integrates all
essential robot functionalities around a common on-
tology and robot memory. Hence episodes experi-
enced by the robot and instructions about how to per-
form a task can be used by the robot to establish new
concepts and integrate these into the ontology. The
concepts of the ontology are the basis for scene inter-
pretation as well as prediction. Prediction is indepen-
dent of the way concepts have been obtained, hence
learning will not be addressed in this paper. The ex-
ample domain of project RACE is a restaurant where
the robot acts as a waiter. This is a highly dynamic do-
main with guests entering and moving about, persons
or side tables occasionally blocking a path, and waiter
activities ranging from serving guests to clearing ta-
bles. Hence predicting possible courses of events may
be quite helpful.
The paper is structured as follows. Section 2 de-
scribes ontology-based scene interpretation as imple-
mented in the framework SCENIOR (for SCEne In-
terpretation with Ontology-based Rules). Section 3
describes a running example of prediction performed
by a robot in the restaurant domain. Section 4 de-
scribes the application of SCENIOR to the running
469
Lehmann J., Neumann B., Bohlken W. and Hotz L..
A Robot Waiter that Predicts Events by High-level Scene Interpretation.
DOI: 10.5220/0004819704690476
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 469-476
ISBN: 978-989-758-015-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
!"#$#%&
'()*%&
+",-.,#%&
/""011#$"#%&
!2)2#%&
/34#"2%&
5($%21).$2%&
6#1"#72%&
8*#9#$2)1:&)",($%&
!"#$%$&'(
)$"*+,#-(
)$"*+,#./%01/2$"-((((((((((((
3+4$5'(
6%.+"#-(
7,0-$8+-(((((((((((((
9+/5"0"&(
)$"*+,#./%010"&(
+:,+50+"*+-(
;%/""0"&(
;%/"(+:+*.2$"(
<'4=$%0*(>+/-$"0"&(
)$"-#5/0"#(<$%?0"&(
>$=$#(,%/@$54(
;+5*+,2$"(
<*+"+(0"#+5,5+#/2$"(
;5+80*2$"(
A"-#5.*#$5(
Figure 1: Relevant part of RACE architecture.
example. Section 5 evaluates the results. Section 6
discusses related work. Section 7 draws some conclu-
sions.
2 ONTOLOGY-BASED SCENE
INTERPRETATION
In this section we give an overview of the scene in-
terpretation system SCENIOR which is integrated in
the RACE system and used for scene interpretation as
well as prediction. SCENIOR has been designed as a
domain-independent framework for high-level scene
interpretation. It can be adapted to different appli-
cation domains by simply exchanging the conceptual
knowledge base, represented in the standardized on-
tology representation language OWL
1
and augmented
by constraints expressed in the semantic web rule lan-
guage SWRL
2
. Figure 2 shows the main components
of SCENIOR. The ontology can be used to automati-
cally generate the knowledge structures and rules for
an operational interpretation system, consisting of a
JESS
3
rule engine, a constraint solver for quantita-
tive temporal constraints, and an inference engine for
probabilistic information in terms of Bayesian Com-
positional Hierarchies (BCHs) (Bohlken et al., 2013).
As described in (Neumann and M
¨
oller, 2006),
conceptual structures for scene interpretation usually
form compositional hierarchies consisting of aggre-
gates at a higher abstraction level with aggregates at a
lower abstraction level as parts, ‘properties’ in OWL
syntax. In SCENIOR, compositional hierarchies of
1
http://www.w3.org/TR/owl2-overview/
2
http://protege.cim3.net/cgi-bin/
wiki.pl?SWRLLanguageFAQ
3
http://www.jessrules.com/
the ontology are converted into hypotheses structures
which play the role of templates for the recognition
process and for prediction. The tokens of a hypothesis
structure represent the events which can be predicted.
The temporal structure of aggregates, specified
by SWRL rules in the ontology, is converted into
quantitative constraints on durations of components
and in gaps between components on temporal rela-
tions between components in a temporal constraint
net (TCN). Spatial information is represented in terms
of events in predefined areas. The interpretation pro-
cess is incremental and can operate in real-time for
everyday dynamic scenes. Its input data are primitive
states and occurrences as perceived by the robot’s per-
ception system, and elementary robot actions logged
by execution monitoring. As an example, a typical
input could be (At guest1 doorArea 0:20:33 0:20:56),
asserting that a guest is within a predefined door area
in the given time interval.
The interpretation system, realized by the JESS
rule engine, tries to assign evidence, obtained from
low-level image analysis in terms of primitive states
and occurrences, to leaves of the hypotheses struc-
tures, instantiating corresponding concepts. If there
are several possibilities, the system establishes a sep-
arate interpretation thread for each alternative. The
quantitative temporal information of incoming evi-
dence is used to update the TCN. If the temporal con-
straints cannot be satisfied, the instantiation of that
thread fails. When all parts of an aggregate are in-
stantiated, the aggregate is instantiated as a whole and
treated as input for higher-level aggregates. This way,
a multi-thread interpretation process is realized, with
fully instantiated hypotheses structures as final out-
put.
Alternative interpretations can be ranked, also in
intermediate interpretation stages, based on proba-
!"#$%&'()*+
,#"-*%./%+0)1%+
2345+6+74859+
+
+
+
+
+
+
+
:;77+
8(*%+
;#/<#%+
0!=+
>#?%@%#$%+
;#/<#%+
!"#A%@'%@+
:)A)+
!"#1'@)<#'+
7"*A%@+
:;77+
!"#$%&'()*+
,#"-*%./%+0)1%+
B%C&"@)*+
!"#1'@)<#'+D%'+
B%C&*)'%1+
E@"F)F<*<1'<$+
G//@%/)'%++
H".%*1
E@<C<'<A%+7')'%1+6+
3$$(@@%#$%1+
>#'%@&@%')'<"#1+
7(FC".%*+
=I&"'J%1%1+
Figure 2: Components of SCENIOR scene interpretation
system.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
470

bilistic aggregate models. This way, weak interpre-
tation threads can be discarded, realizing a Beam
Search. Probabilistic ranking is currently not used for
prediction.
SCENIOR is designed to be robust against miss-
ing input, due for example to limitations of the robot’s
perception. To achieve that, SCENIOR has the ability
to infer (to hallucinate in SCENIOR-jargon
4
) missing
evidence if it helps to complete higher-level aggre-
gates. This ability is also used to predict future de-
velopments of a scene, as will be described in Section
4.
3 EXAMPLE DEMONSTRATOR
Our guiding prediction examples deal with concepts
which the robot has learnt in the scenarios described
below. This is the short version of a longer demon-
strator and it is meant to show how the robot predicts
events. Note that in the following, the usual ontolog-
ical naming conventions are used: all names of in-
stance data (individuals) start with a lower case let-
ter, comprise the name of their class (or an acronym
thereof) and a integer at the end (except for the robot’s
name, which has no numerical index); names of con-
cepts (classes) are compound and each component
starts with a capital letter. All other references to in-
dividuals and classes are informal.
Figure 3 illustrates an experimental restaurant set-
ting, which comprises: a counter (counter1), tables
(e.g., table1, table2), people (e.g., guest1, sitting on
chair), a coffee mug (e.g., mug1), a robot (trixi) and
predefined reference areas for navigation (e.g. pre-
manipulation and manipulation areas pmaSouth1 ma-
South1) and manipulation (e.g. placing area paEast1).
The initial position of the robot is at the counter,
i.e. in the area nearAreaCounter1 (which includes
counter1’s manipulation and pre-manipulation areas),
where it has just picked up mug1 from counter1 and
is ready to perform the task of serving it to guest1 at
table1, approaching the guest from the right.
Scenario A: The robot starts its navigation but
finds table1’s manipulation area north (maNorth1)
blocked by a person (person1). The robot is in-
structed to wait until person1 has freed the path.
4
The term “hallucinate” reflects the idea that “percep-
tion is controlled hallucination” which in the Artificial In-
telligence community is attributed to Max Clowes (1971),
although various Internet sources date it as far back as
the German physician and physicist von Helmholtz (1821-
1894).
table1
trixi
(robot)
guest1
North
nearAreaCounter1
counter1
maSouth1
mug1
table2
paEast1
fatr1
pmaSouth1
pmaNorth1
maNorth1
saEast1
Figure 3: Floor plan of experimental restaurant setting.
After a short while, person1 frees the path and the
robot completes its task.
Scenario B: The robot starts its navigation but an ex-
tension table exTable1 blocks maNorth1. Based
on the experience in Scenario A, the robot decides
to wait. After a while, it is instructed that this
kind of obstacle must be circumnavigated, hence
the robot chooses another path, thereby navigates
to maSouth1 and completes its task.
Scenario C: Before starting the task anew and after
having grasped mug1 from counter1, the robot is
asked to predict, based on its previous experience,
what may happen next. The robot will predict
three possible alternative courses of events:
Course 1: maNorth1 will not be blocked, task
will be completed.
Course 2: maNorth1 will be blocked by person,
task will be completed as Scenario A.
Course 3: maNorth1 will be blocked by table,
task will be completed as Scenario B.
4 ONTOLOGY-DRIVEN
PREDICTION
We now describe ontology-driven prediction us-
ing the scene interpretation system SCENIOR.
Prediction is realized as model construction, i.e.
as a reasoning process which tries to explain ev-
idence in terms of high-level structures and this
way generates possible future evidence. We re-
strict prediction to partial model construction by
considering only those conceptual structures which
are compositionally connected to the given evi-
dence. Prediction follows hypotheses structures
in a similar way as a scene interpretation process,
by constructing aggregate instantiations from com-
ponents. Consider the general format of an aggregate:
ARobotWaiterthatPredictsEventsbyHigh-levelSceneInterpretation
471

!"#$"%&'(""!)'#*!+","-
!"#$"%&'(""!)'#*.-
/0'+1"234,567+%+8$7*4-
!"#$"%&'(""!)'#*.-
/0'+1"2!*58+%+8$7*4-
!"#$"%&'(""!)'#*.-
9'*/0'+1"2%+8$7*4-
:'$";'<=">*.-
?7*):=@-
:%/0'+1"2.-
/4A"#>',-
A=*:=@;'A%-
%#"5%B5+)"2:%A:%-
%#"5%B5+)"2!%A%-
%#"5%B5+)"2A%:%-
C'D'*%*&'=,*"#-
C'D'*%*A:%-
<=">*%*!%-
E'027,@:=@-
:'$"/5>"-
C'D'*%*A:%-
%#"5%B5+)"2A%:%-
%#"5%B5+)"2:%A:%-
A05+"FDG"+*:=@-
E'027,@:=@-
:=@F,A%-
:%/0'+1"2.-
/4;5D0"-
H-H-H-
:'$"/5>"-
:'$";'<=">*.-
?7*):=@-
A=*:=@;'A%-
H-H-H-
Figure 4: A multi-level compositional structure. Solid
edges represent conjunctive properties, dotted edges dis-
junctive properties.
Class: <concept name>
EquivalentTo / SubClassOf:
<superconcept name>
AND <property-1>
<cardinality restriction-1>
< property filler concept-1>
...
AND <property-N>
<cardinality restriction-N>
< property filler concept-N>
The aggregate may be a property filler for a higher-
level aggregate; simultaneously, properties of the
aggregate may be connected to lower-level aggre-
gates, see Figure 4 for an example of a multi-level
compositional structure.
Given evidence for a property filler, model con-
struction amounts to asserting the instance of the ag-
gregate concept as a whole, and in consequence in-
stances of all its other property filler concepts. As-
serted instances are recursively treated as evidence,
triggering further aggregate assertions. Since an as-
serted instance may be an aggregate with parts, the
process may propagate top-down as well as bottom-
up.
Instantiating a concept in the prediction process
calls for a value assignment, and different values may
lead to different alternative predictions, giving rise to
a branching future. The following strategy is pursued:
1. Concepts with symbol values are assigned all pos-
sible instances of compatible class known so far
and, under certain conditions, also a new instance.
2. Concepts with a numerical value range submit the
current value range to the constraint system, lead-
ing to a reduced range or to inconsistency. This
pertains, in particular, to all time intervals.
For the RACE domain, the basic idea is to let SCE-
NIOR go ahead with the current scene interpretation
irrespective of real-time, and hallucinate expected ev-
idence, this way generating a prediction. To illustrate
the process, consider again the compositional struc-
ture depicted in Figure 4. As described in the pre-
ceding section, the robot hat learnt to serve a coffee
even if an obstacle is in the way. The figure shows
the detailed compositional structure of the activities
when the manipulation area is blocked by a per-
son. The other two versions for a ServeACoffeeShort-
Scene have the same structure except for differences
in the middle level and in temporal constraints (not
shown). The concept AreaAttachedSAPA specifies
that a placing area (PA) is assigned to a sitting area
(SA). Similarly, a manipulation area (MA) may be as-
signed to a PA, and a premanipulation area (PMA),
where a robot prepares for a manipulation, may be as-
signed to a MA.
Note that by exchanging the ontology the predic-
tion procedure is automatically adapted to a different
domain.
We now consider the prediction task presented in
the preceding Section in Scenario C. The robot has the
goal to place the mug in front of the guest, it knows
the area attachments as part of its permanent knowl-
edge about the environment. The facts characterizing
the situation are given in terms of instances of the cor-
responding concepts, also the goal which is part of the
given prediction situation. All instantiated concepts
are marked by boxes in Figure 4.
In real robot operations, evidence is provided by
the robot’s execution monitoring of its own activities,
by the robot’s observations of the environment,
and by initialization with permanent knowledge.
Evidence is presented as fluents using the YAML
syntax, shown below for the instance guestAtSA1.
!Fluent
Class_Instance: [GuestAtSA, guestAtSA1]
StartTime: [00:00:00, 00:00:00]
FinishTime: [inf, inf]
Properties:
-[hasPhysicalEntity, PhysicalEntity, guest1]
-[hasArea, SA, saEast1]
The fluent specifies that the occurrence guestAtSA1,
instance of class GuestAtSA, has begun at time
00:00:00 relative to the starting time of the episode,
the finish time being unrestricted. The two bracketed
time values can be used to denote an uncertainty
range. The occurrence has two components, a guest
guest1 and the predefined sitting area saEast1 of
table1.
We now sketch the technical steps for ontology-
based prediction with SCENIOR in this situation. As
mentioned before, upon initialization SCENIOR cre-
ates hypotheses structures for all aggregate concepts
of its ontology, including the ServeACoffee concepts
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
472

depicted in Figure 4. Attached to the hypotheses
structures are automatically generated interpretation
rules, realized by the JESS rule system. The rules fire
if evidence for any concept arrives. If the evidence
fits several concepts, it is assigned to each alternative,
and independent interpretation threads are created for
the alternatives.
In our case, the evidence describing the predic-
tion situation immediately causes the creation of six
alternative threads representing possible courses of
events, two for each of the three kinds of ServeACof-
feeScene. For each kind, one of the two threads speci-
fies area instantiations for a service from the north, the
other for a service from the south. Since both compo-
nents of PlaceObjectMug are introduced as evidence,
the aggregate PlaceObjectMug is instantiated imme-
diately, as a necessary robot activity to achieve goal
mugOnPA postulated as evidence.
SCENIOR now performs prediction by “thinking
ahead”, realized by advancing a simulated time. At
the beginning of the prediction phase, the temporal
constraint nets in all threads of SCENIOR indicate
that the robot should start moving (MoveBase) to the
designated premanipulation area as a possible way to
complete evidence for higher-level aggregates (and
thus possibly achieve the goal). Hence MoveBase
is hallucinated for each thread, i.e. instantiated in
prediction mode without evidence. After a while (of
simulated time), the robot reaches the designated pre-
manipulation area, and the occurrence RobotAtPMA
is hallucinated. In the threads where blocking is ex-
pected, this leads to a completed ServeACoffeeShort-
NotBlockedActivity since the PutMugToPA has been
instantiated earlier.
For the other kinds of ServeACoffeeShortScene
the hypotheses graphs imply that the manipulation
area will be blocked and this can be observed by
the robot. The occurrences MABlockedByPerson or
MABlockedByTable are therefore hallucinated while
the robot is approaching the premanipulation area. In
the case of a person blocking the area, the robot has
learnt to wait until the area will be freed, and then to
continue serving the placement area from the antici-
pated manipulation area. In the case of a static obsta-
cle, like a table blocking the manipulation area, the
robot has learnt to turn around and move to the other
side of the table, serving the guest from the left as an
exception. These activities are hallucinated in their
respective order as the simulated time advances, and
finally the goal is achieved. The alternative threads
allow to predict completion times based on the tem-
poral model. As it turns out, they differ considerably
for our slow robot waiter depending on the blocking
situation.
Table 1: Expected minimal durations for serving a coffee.
Course of Activities Start Finish Duration
(ServeACoffeShortScene) (MugOnPA)
NotBlockedAct. 14:48:28 14:49:13 00:00:44
BlockedDynamicAct. 14:48:28 14:49:43 00:01:15
BlockedStaticAct. 14:48:28 14:54:44 00:06:12
Note that SCENIOR typically entertains a large
number of threads during a prediction process, often
more than one hundred. The threads represent alterna-
tive partial predictions due to ambiguous assignments
(several PMAs and MAs are possible) and also due to
the strategy, adopted for real-life scene interpretation,
to doubt all evidence. In our prediction experiments,
the threads are rated by a measure of completeness,
hence incomplete predictions are discarded at the end.
5 EXPERIMENTS AND
EVALUATION
In this section, we describe experiments carried out
with concrete predictions, and a first evaluation of
the approach. The first prediction experiment is
based on the ontological structures illustrated in Fig-
ure 4. SCENIOR has received background knowledge
about area attachments (areaAttachedSAPA1, etc.),
evidence about the current situation (guestAtSA1,
robotAtCounter1, holdingMug1) and postulated evi-
dence about the goal mugOnPA1.
Screenshots of alternative predictions determined
by SCENIOR for this evidence are shown in Figures
5 and 6 for Course 2 and Course 3 of Scenario C,
respectively, as described in Sections 3 and 4. The
screenshot for Course 1 cannot be shown for lack
of space. Downward arrows indicated the compo-
sitional structure of aggregates, upward arrows indi-
cate instantiations. Evidence is depicted by white
boxes (at the bottom), concepts instantiated through
evidence by dark gray boxes (in the middle), and hal-
lucinated instantiations by light gray boxes (in the top
area). Each box also shows the ranges for the starting
and finish time. For hallucinated instantiations, most
ranges remain uncertain to some extent, according to
the possible time intervals specified by the TCN.
For a real-life application, the expected minimal
durations for serving a coffee shown in Table 1 would
probably be the most interesting prediction data. As
to be expected, the obstacle-free service takes the
shortest time. Waiting for a person to move out of
the way causes a slight delay. Turning around and
travelling to the other side of the table when facing
a static obstacle causes a major delay. In our experi-
ment, the quantitative values result from durations de-
ARobotWaiterthatPredictsEventsbyHigh-levelSceneInterpretation
473
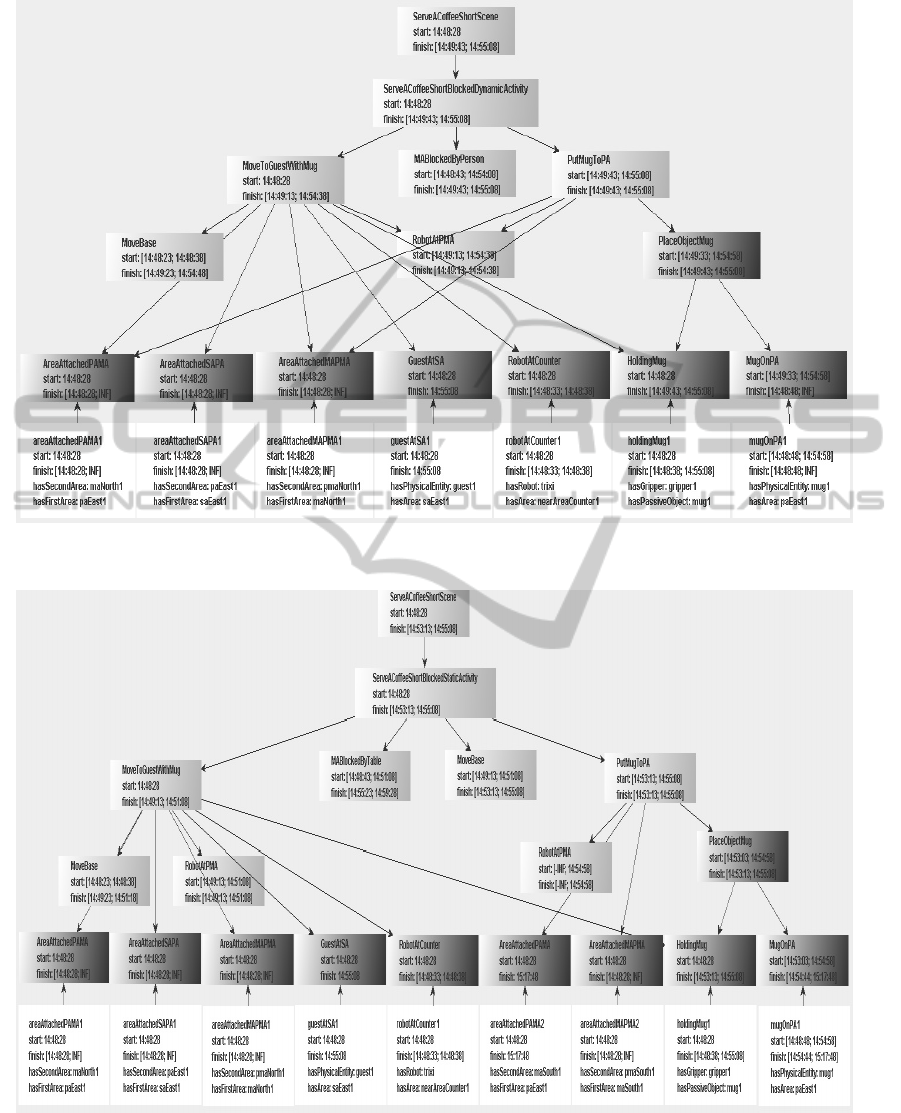
Figure 5: Prediction of occurrences (light gray) for ServeACoffeeShortBlockedDynamic after initial knowledge and goal
(white and dark gray).
Figure 6: Prediction of occurrences (light gray) for ServeACoffeeShortBlockedStatic after initial knowledge and goal (white
and dark gray).
fined in the ontology for each of the activity concepts,
including the expected time for a person to unblock
the way.
In total, SCENIOR has generated six complete al-
ternative predictions for how the robot might achieve
the goal, three as described above for attempting to
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
474

serve from the north, and three very similar predic-
tions for attempting to serve from the south. The com-
putation time on a laptop has been 18s and 477 inter-
pretation threads, all of which incomplete except for
the six correct predictions. Whenever evidence en-
ters the system, the number of existing interpretation
threads doubles to reflect the possibility that the evi-
dence may be faulty. Currently, this is applied to all
evidence including background knowledge. In con-
sequence, the number of threads often climbs above
an upper limit, in the experiments set to 100, and is
then reduced by discarding low-ranking threads. This
strategy has been conceived for scene interpretation
with noisy data, but it is also in some respect im-
portant in our prediction scenarios: The background
knowledge provides two pieces of evidence for the
concept AreaAttachedMAPMA, one referring to the
areas north of the guest, the other to the areas south
of the guest, only one of which will finally allow a
complete interpretation. Hence at the time the evi-
dence is provided, each must give rise to two alterna-
tive threads. We have shown in the preceding section
that prediction is solely based on occurrence concepts
represented in the ontology. By changing the ontol-
ogy, predictions are immediately possible for a new
domain. To illustrate this, we have employed predic-
tion also for a second restaurant scene modelled as
shown in Figure 7. Here a guest has entered at the
door, and two developments of the scene are possi-
ble according to the model: (i) the guest may be a
TransientGuest and leave without going to a table, or
(ii) the guest may go to a table, have a coffee and
complain (the reason is a late service).
Our experiments show that model-based scene in-
terpretation can be used for prediction, with only mi-
nor changes to the interpretation system. Further-
more, the approach can be easily applied to other ap-
plication domains, since the scene interpretation and
prediction facilities are automatically generated from
the ontological structures.
!"#$%&''()*+,-'*.$(#.%!"#$%,
/#')#&012##,
!"#$%0134+*(.%,
!"#$%5($(%,
&%, &%,&%, &%,
6#$%*"'*.%/7#.#,
!"#$%,*%,,
8#*'&'#*911',
!"#$%,*%,,
:+11'&'#*,
!"#$%,*%,,
8#*'&'#*911',
!"#$%,*%,,
8#*'&'#*-*;+#,
Figure 7: Model of guest visit.
6 RELATED WORK
In Robotics, prediction often refers to visual monitor-
ing for obstacle avoidance. Given the role of the on-
tology in SCENIOR, our approach can better be com-
pared to reasoning about action. A lot of the literature
on ontology-driven prediction focusses on adapting
for Description Logic (DL) the Action Calculi (ACs)
developed between the 1960s and 90s. References
to specific ACs can be found in (Thielscher, 2011).
All ACs face core reasoning problems: the Projec-
tion Problem (how to compute the direct effects of an
action); the Ramification Problem (how to compute
the indirect effects of an action); the Frame Problem
(how to compute what is not affected by the execu-
tion of an action). ACs are semi-decidable and as a
consequence they can not be used by DL reasoners.
Fragments have been identified to achieve automation
(Baader et al., 2010) but these results do not easily
scale up.
Other approaches to prediction are, like SCE-
NIOR’s (Bohlken et al., 2011), based on ontology-
based scene interpretation. (Neumann and M
¨
oller,
2006) describe how evidence can be used to trigger
model-based hypotheses about a scene which are used
to predict parts not yet supported by evidence. The
classical example is the observation of a ball running
over a street, which can be taken as a partial instanti-
ation of a model for a child chasing the ball.
A first formalization of scene interpretation based
on model construction is owed to (Reiter and Mack-
worth, 1989). Here scene interpretation is a search for
instantiations of the conceptual background knowl-
edge such that the instantiations contain the evidence
about the scene. A model constructed this way may
naturally comprise predictions about the development
of the scene. (Neumann and M
¨
oller, 2006) extends
the model construction paradigm to ontologies us-
ing DL to represent knowledge. (Riboni and Bet-
tini, 2012) check evidence for consistency with as-
serted interpretation, realizing model construction for
fixed activities. (Cohn et al., 2003) and (Shanahan,
2005) formulate interpretation in terms of abduction,
as the search for high-level concepts whose instanti-
ation would entail the evidence. (Chen and Nugent,
2009) formulate interpretations as a two-tiered pro-
cess of deriving an abstracted ontology from the data
and of matching it with a standard ontology.
7 CONCLUSIONS
t has been shown that model-based scene interpreta-
tion can be used for prediction tasks. From a con-
ARobotWaiterthatPredictsEventsbyHigh-levelSceneInterpretation
475

ceptual point of view, this is not surprising because
both, prediction and scene interpretation, are model-
construction tasks in the logical sense. For this rea-
son, it is easy to see that the reasoning framework can
also be used, besides for predicting, for reconstructing
past occurrences, or generally, for imagining any kind
of missing information, past and future, which serves
to integrate given evidence into higher-level models.
As a draw-back, we must mention the tedious task
of preparing hand-crafted models in OWL and con-
straints in SWRL. While this combination of sym-
bolic reasoning and constraint solving is a promising
architecture for bridging the gap between high-level
concepts and low-level robot routines, standardized
system support for incremental scene interpretation
and prediction is not yet available, and a complex sys-
tem like SCENIOR is required to operationalize real-
life applications.
As work in RACE progresses, we expect that the
robot will be able to learn models from experiences.
This will hopefully allow to limit the production of
hand-crafted models to basic behaviours and occur-
rences, from which higher-level aggregates can then
be formed by learning.
Future work will also adapt an existing probabilis-
tic rating system using Bayesian Compositional Hier-
archies (BCHs) (Bohlken et al., 2013) for prediction
tasks.
ACKNOWLEDGEMENTS
The research reported in this paper was partially
supported by the European Grant FP7-ICT-2011-7-
287752
REFERENCES
Baader, F., Lippmann, M., and Liu, H. (2010). Using causal
relationships to deal with the ramification problem
in action formalisms based on description logics. In
Ferm
¨
uller, C. G. and Voronkov, A., editors, LPAR (Yo-
gyakarta), volume 6397 of Lecture Notes in Computer
Science, pages 82–96. Springer.
Bohlken, W., Koopmann, P., Hotz, L., and Neumann, B.
(2013). Towards ontology-based realtime behaviour
interpretation. In Guesgen, H. and Marsland, S., edi-
tors, Human Behavior Recognition Technologies: In-
telligent Applications for Monitoring and Security,
IGI Global, pages 33–64.
Bohlken, W., Koopmann, P., and Neumann, B. (2011). Sce-
nior: Ontology–based interpretation of aircraft service
activities – fbi–hh–b–297/11. Technical report, Uni-
versity of Hamburg, Department of Informatics Cog-
nitive Systems Laboratory.
Chen, L. and Nugent, C. (2009). Ontology-based activity
recognition in intelligent pervasive environments. Int.
J. Web Inf. Syst., 5(4):410–430.
Cohn, A. G., Magee, D. R., Galata, A., Hogg, D., and Haz-
arika, S. M. (2003). Towards an architecture for cogni-
tive vision using qualitative spatio-temporal represen-
tations and abduction. In Freksa, C., Brauer, W., Ha-
bel, C., and Wender, K. F., editors, Spatial Cognition,
volume 2685 of Lecture Notes in Computer Science,
pages 232–248. Springer.
Neumann, B. and M
¨
oller, R. (2006). On scene interpretation
with description logics. In Cognitive Vision Systems,
pages 247–275.
Reiter, R. and Mackworth, A. K. (1989). A logical frame-
work for depiction and image interpretation. Artif. In-
tell., 41(2):125–155.
Riboni, D. and Bettini, C. (2012). Private context-aware
recommendation of points of interest: An initial in-
vestigation. In PerCom Workshops, pages 584–589.
IEEE.
Shanahan, M. (2005). Perception as abduction: Turning
sensor data into meaningful representation. Cognitive
Science, 29(1):103–134.
Thielscher, M. (2011). A unifying action calculus. Artif.
Intell., 175(1):120–141.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
476
