
Evacuation Simulation through Formal Emotional Agent based
Modelling
Ilias Sakellariou
1
, Petros Kefalas
2
and Ioanna Stamatopoulou
2
1
Dept. of Applied Informatics, University of Macedonia, 156 Egnatia Str., 54636, Thessaloniki, Greece
2
Dept. of Computer Science, The University of Sheffield International Faculty, City College,
L. Sofou 3, 54624, Thessaloniki, Greece
Keywords:
Emotional Agents, X-Machines, Formal Modelling, Simulation, Evacuation Modelling.
Abstract:
Evacuation Simulation is recognised as an important tool for assessing design choices for urban areas. Al-
though a number of approaches have been introduced, it is widely acceptable that such simulation scenarios
demand modelling of emotional aspects of evacuees, and how these affect their behaviour. The present work,
proposes that formal agent modelling based on
e
X-machines can rigorously define but also naturally lead to
realistic simulations of such scenarios.
e
X-machines can model agent behaviour influenced by emotions, in-
cluding social aspects of emotions, such as emotion contagion. The developed formal model is refined to
simulation code, that is able to visualise and simulate crowd believable behaviour.
1 INTRODUCTION
Assessing the evacuation capability of an area under
emergency conditions is a crucial aspect to the de-
sign of modern urban areas, such as buildings, sta-
diums, metro stations, etc. Computer based simula-
tion has been identified as an important tool for such
evacuation analysis and assessment of design choices.
A large number of evacuation models have been
proposed (Santos and Aguirre, 2004; Kuligowski,
2004) that follow different approaches (Zheng et al.,
2009) with respect to the method used and granularity
(scale) of the simulation.
There is a remarkable range of crowd evacuation
models, that includes fluid dynamics models, social
force models, cellular automata and gas lattice mod-
els. To our interest, Agent Based Modelling (ABM)
has been widely adopted as a promising approach
to evacuation modelling, due to a number of advan-
tages (Bonabeau, 2002), such as emergence, flexibil-
ity and natural description of the model under study.
ABM can easily accommodate the diversity of popu-
lation with respect to walking speed, age, behavioural
changes depending on psychological stress, and dis-
abilities (Christensen and Sasaki, 2008). Successful
case studies using ABM have been reported, such
as a metro station evacuation (Zarboutis and Mar-
maras, 2004), validation of real data in the “Garuda
Indonesia Airways Accident” (Miyoshi et al., 2012),
and evacuation plans of the Castello Ursino (Camillen
et al., 2009). However, non of these approaches em-
ploys a formal modelling of the behaviour of evac-
uating agents. The significant amount of research in
the area of evacuation modelling and simulation could
not possibly be reported in the context of the present
paper; the reader should refer to reviews, such as
(Kuligowski, 2004; Schadschneider et al., 2009; Zhou
et al., 2010; Zheng et al., 2009).
In order to achieve a realistic simulation, agents
must be able to demonstrate believable behaviour, the
latter reflecting behavioural changes under stress con-
ditions, i.e. considering emotions as part of the agent
reasoning process. So far, there is not yet a widely
accepted definition of emotions supported by a com-
plete theory that can describe how emotional pro-
cesses affects reasoning in general (Kleinginna and
Kleinginna, 1981; Frijda, 2007). Most commonly
used psychological theories in agent design today re-
fer to the reactions to three types of stimuli (OCC
model) (Ortony et al., 1988), while a number of com-
putational models of emotions, logically formalised
as BDI agents have been proposed, most recent being
(Marreiros et al., 2010; Steunebrink et al., 2010; Ste-
unebrink et al., 2011). The role of emotions as well
as the type of agents in emergency evacuation has
been receiving increased attention (Tsai et al., 2011;
Zoumpoulaki et al., 2010). Rather recently, more
complex issues, such as emotion contagion (Hoogen-
193
Sakellariou I., Kefalas P. and Stamatopoulou I..
Evacuation Simulation through Formal Emotional Agent based Modelling.
DOI: 10.5220/0004824601930200
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 193-200
ISBN: 978-989-758-016-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

doorn et al., 2010), have been addressed by different
models.
The purpose of this paper is twofold: demonstrate
that formal state based modelling can rigorously de-
fine complex agent behaviour influenced by emotions,
and that such models can be refined to executable
code, thus leading to realistic simulations of evacu-
ation scenarios. Thus, the main contribution of this
work is the use of
e
X-Machines with a complex emo-
tion model involving emotion contagion, demonstrat-
ing (a) its power as a formal method to be used in
cases such as agent based evacuation modelling and
(b) a refinement of the former that can produce an ex-
ecutable simulation.
The structure of this paper is as follows: Section
2 presents the
e
X-machines formalism. Section 3 dis-
cusses the evacuation scenario used as a working ex-
ample, whereas section 4 describes how that scenario
is modelled as a formal model. Section 5 presents
discusses the mapping between modelling constructs
and the simulation platform, as well as presents initial
experimental results. Finally, Section 7 concludes the
paper and suggests direction for future work.
2 EMOTION X-MACHINES
Formal methods allow the mathematically rigorous
modelling of complex systems and their behaviour.
Although, formal modelling can be viewed as a
pedantic step towards development, it offers the abil-
ity to prove correctness with respect to the specifica-
tion. Correctness can be achieved by verification that
certain properties hold in the original model and that
the system implementation behaves as expected under
a complete test set. This work employs X-machines
(XM) (Holcombe and Ipate, 1998), that are state-
based machines extended with a memory structure,
that makes the machine more compact compared to
memory-less state machines, and functions that guard
transitions between states. The great advantage is
their strong legacy of theory and practice, including
testing methods that prove correctness (Ipate and Hol-
combe, 1997).
The state based orientation of XM provides an in-
tuitive modelling approach of agents, as for instance
in the case of biology-inspired MAS (Kefalas et al.,
2009). X-machines have been formally extended to
model emotional agents, leading to the emotions X-
machines. The new method introduces an emotional
state, represented as a vector E containing emotion
identifiers.
Definition 1. An
emotions X-machine
(
e
X ) is defined
as (Kefalas et al., 2012):
e
X = (Σ, Γ, Q, M, Φ, F, q
0
, m
0
, E,
e
Φ, e
0
)
where:
• Σ and Γ are the input and output alphabets.
• Q is a finite set of states.
• M is a (possibly) infinite set called memory.
• Φ is a set of partial functions ϕ; each such func-
tion maps an input, a memory value and an emo-
tional states to an output and a possibly different
memory value, ϕ : Σ× M × E → Γ× M.
• F is the next state partial function, F : Q×Φ → Q,
which given a state and a function from the type
Φ determines the next state. F is often referred to
as a state transition diagram.
• q
0
and m
0
are the initial state and initial memory.
• E = (ε
1
,...,ε
n
) is a vector containing emotion
identifiers.
•
e
Φ : E ×M× Σ → E ×M is the emotions revision
function.
• e
0
is the initial vector of emotion identifiers repre-
senting the initial emotional state.
Input triggers the emotions revision function thus
changing the emotional state and the memory. The
same input triggers a transition function which will
return a new state. Thus, the emotions vector can
change the computation path by affecting the appli-
cability of functions. More formally, computation is
defined as follows.
Definition 2. An
e
X
computation state
is defined as
the tuple (q,m,e), with q ∈ Q and m ∈ M and e∈ E. A
computation step, which consumes an input σ ∈ Σ and
changes the computation state (q,m,e) ⊢ (q
′
,m
′
,e
′
) is
essentially composed of two substeps:
• (q,m, e)
e
ϕ
⊢ (q,m
′′
,e
′
) with q ∈ Q, e,e
′
∈ E and
m,m
′′
∈ M, such that
e
ϕ(e,m, σ) = (e
′
,m
′′
)
• (q,m
′′
,e
′
)
ϕ
⊢ (q
′
,m
′
) with q,q
′
∈ Q, m
′
,m
′′
∈ M
and e
′
∈ E, such that ϕ(σ,m
′′
,e
′
) = (γ,m
′
) and
F(q,ϕ) = q
′
.
A computation defined as the series of computa-
tion steps that take place when all inputs are applied
to the initial computation state (q
0
,m
0
,e
0
).
Although
e
X seems to provide an elegant way to
model agents under emotions, further investigation of
its expressive power and how it can accommodate the
large number of theories proposed in the area is nec-
essary. Thus, one of the aims of the current paper, is
to demonstrate the effectiveness of
e
X in representing
an artificial emotion contagion model.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
194

Figure 1: Example blueprint of an office floor, indicating
the plans from each room to the exit. For illustrative pur-
poses evacuation paths are depicted in yellow in the figure.
3 THE EVACUATION SCENARIO
An office floor evacuation scenario was selected as a
working example for this work. The floor (Figure 1)
consists of severaloffices, connected though corridors
and one exit. Lines in the figure represent evacuation
paths, with red dots indicating points that form the
evacuation plan (see section 4). The simulation con-
cerns evacuee behaviour from the moment danger is
perceived until the evacuee exits the office floor. The
scenario assumptions are:
• Initially, all evacuees are located inside offices.
• Evacuees have limited visibility, i.e. their knowl-
edge (sensing) about the environment is limited to
a neighbourhood.
• There are parents accompanying children.
• Evacuation plans are posted in each office door,
that can be consulted by evacuees. Plans come in
the form of a path from the office position to the
exit.
• Security officers, positioned in strategic locations,
provide evacuees with directions to exits, similar
to evacuation plans.
Informally, agents are initially in a “No Emer-
gency” state, and upon perceiving danger (alarm bell),
they proceed to the room door, obtain the evacuation
plan and follow the latter to reach the exit. However,
during the evacuation, agents might get disoriented
due to an increased emotional level, “forget” their
original plan and wander, until they receive instruc-
tions either from a security officer, or obtain a new
plan from a spot where it is posted. Parents ensure at
each step of the evacuation that their child is close; in
the case that is not they drop temporarily their current
plan and engage in a searching behaviour to find their
child before resuming evacuation. Finally, emotional
levels affect how fast an agent is moving; higher emo-
tional levels lead to an increased walking speed.
4 MODELLING USING
E
X
Modelling in the
e
X formalism requires specifying
agent behaviour in terms of states, functions, input,
output and emotions (Definition 1). Input Σ concerns
the agent’s percepts (P hereafter) the latter being:
• The set of available “empty” positions the agent
can move to, in the form of (Pos,empty), where
Pos is the point’s coordinates.
• Positions of interest, as for example the location
of a room door (door(Pos)).
• Plan information, obtained only at specific
points (doors), in the form (seq(Pos
i
), plan), or
by security officers, (seq(Pos
i
),of ficer) where
seq(Pos
i
) : [P
1
,... P
n
] is a sequence of points in
space or ε to denote the empty plan.
• Location and status of the agent’s child ({child-
close,see-child,child-exited}).
• Emotional values, expressiveness and distance of
other agents in its vicinity, in order to compute
emotion contagion strength (section 4.2).
The
e
X holds a number of evacuee (agent) char-
acteristics, some of which determine agent behaviour,
while others hold information regarding evacuation.
For instance, the fact that the agent has a child (Ch)
or its personality trait are memory values that allow to
easily model crowd diversity using a single
e
X , with-
out deviating from the formal definition. Other ele-
ments of memory hold more “dynamic” information,
as for example the current speed (S) of the agent, the
current evacuation plan seq(Pos
i
) or the position Pos.
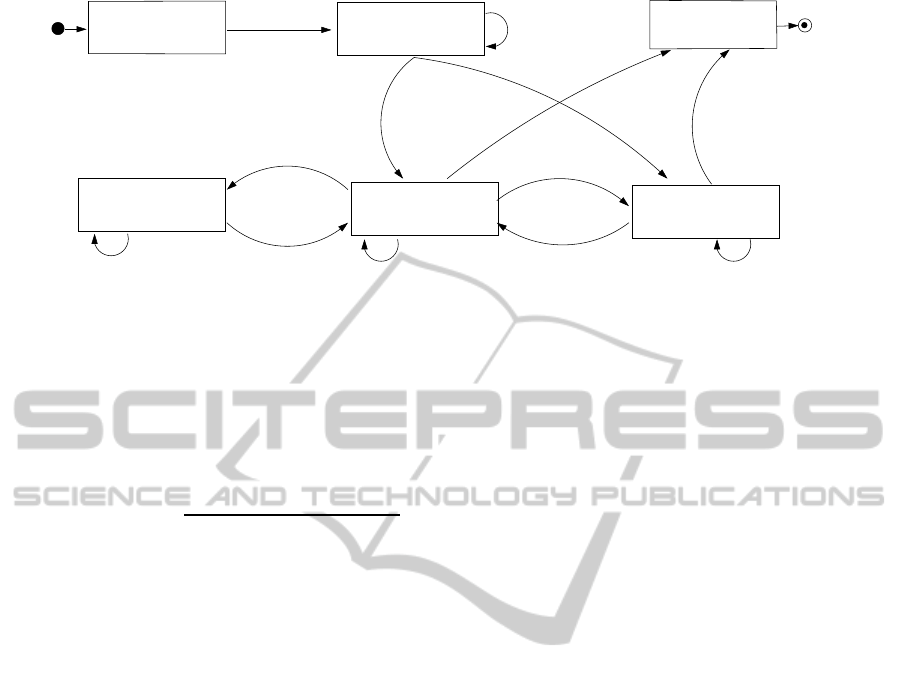
The state transition diagram of the model, i.e. F in
Definition 1, is depicted in Figure 2. “No Emergency”
is the initial state in which evacuees are found, and
state “Exiting” is the final state, which when reached,
agents are considered to have evacuated the floor suc-
cessfully and disappear from the simulation. Note
that in the figure, transitions are marked by functions.
In the following, some of the functions are discussed
in order to show how agent behaviour is encoded.
For instance, function perceive-danger simply acts
as a guard for state transition between the “No emer-
gency” state and that of “Looking for Plan”:
ϕ
perceive-danger
: (P, (ε,Pos, S,Ch), E) 7→
EvacuationSimulationthroughFormalEmotionalAgentbasedModelling
195

(“DangerPerceived”,(ε,Pos,S,Ch))
if danger ∈ P
Function exiting-room is slightly more compli-
cated and implements the strategy of the evacuee to
move closer to the room door. The function moves
the agent to a new “empty” position. Since posi-
tions in percepts are given as sets of coordinates it
is easy to compute whether the distance of the new
point is indeed closer to the door. The boolean func-
tion canMove(Pos,NewPos,S) returns true if NewPos
is reachable by the agent in a single simulation step
given the agent’s speed S.
ϕ
exiting-room
: (P,(Plan,Pos,S,Ch),E) 7→
(“ExitingRoom”,(Plan,NewPos,S,Ch))
if (NewPos,empty) ∈ P
∧ canMove(Pos,NewPos,S) ∧ door(DoorPos) ∈ P
∧ dis(NewPos,DoorPos) < dis(Pos,DoorPos)
Function get-dissoriented presents an interesting
case since it also takes into account emotions, dis-
cussed in the section that follows:
ϕ
get-dissoriented
: (P, (Plan,Pos,S,Ch),E) 7→
(“GotDissoriented”,(ε,Pos,S,Ch))
if horror-level(E) ∈ {panic,hysteria}
In a similar manner other functions depicted in
Figure 2 are modelled.
4.1 The Emotion Revision Function
The emotional state of the evacuee is represented as
the a vector E containing (artificial) emotion identi-
fiers. Only the basic emotion Horror (Parrott, 2001)
is included, which can be assigned a set of crisp
values, i.e. HorrorLevel={calm, alarm, fear, terror,
panic, hysteria}. To model the strength of the emo-
tion and determine the horror level, a strength value
SV is required, ranging from SV = 0...100 and the
initial emotion vector is e
0
= (calm, 0).
The emotion revision function updates the emo-
tion strength and horror level, given individual emo-
tion strength updates δSV
ind
and emotion contagion
δSV
social
according to the following:
SV
′
= SV + δSV
ind
(P,M,E) + δSV
social
(P,M,E)
Individual emotion strength updates depend on the
rate of change of E, different for each evacuee, since
evidence suggests that there exist individual differ-
ences in affective response to emotion eliciting stim-
uli. Personality trait, for example, is one relevant fac-
tor. Some individuals have a predisposition (sensitiv-
ity response) towards experiencing certain emotions,
so different personality traits are responsible for how
quickly an emotional state is reached, maintained and
recovered from (Dalgleish and Power, 1999), result-
ing to some agents reaching a state of panic or hysteria
more easily. The personality trait in the current imple-
mentation ranges between 0.5 to 1.5 (normal distribu-
tion) and thus the change of emotion strength due to
the former is given by:
f
ind
(M) = pTrait(M) ∗ EmotionLevelInc
where M is the Xm Memory, pTrait(M) a func-
tion that obtains the agent personality trait from the
e
X Memory and EmotionLevelInc a constant, set as
an experiment/simulation parameter. However, in a
realistic situation, emotional strength levels can drop
when certain situations occur, e.g. when a plan is per-
ceived, or instructions are received from a security of-
ficer, thus S should be decreased by a factor:
f
percept
(P,E) = − c ∗ eStrength(E)
if (seq(Pos
i
),of ficer) ∈ P∨ (seq(Pos
i
), plan) ∈ P
where c is a constant set as a simulation param-
eter and eStrength(E) a function that represents that
the emotional strength is obtained by the emotional
vector. Thus the individual strength update becomes:
δSV
ind
(P,M,E) = f
ind
(M) + f
percept
(P,E)
4.2 Emotion Contagion
The emotional contagion theory implemented the
model, is a simplification of the ASCRIBE model pro-
posed in (Hoogendoorn et al., 2010), that has been
successfully used to simulate the May 4 incident in
Amsterdam, Netherlands (Bosse et al., 2011). Briefly,
the ASCRIBE model introduces contagion strength
γ
iSj
that determines the strength by which agent j in-
fluences on some state S agent i. Since in the model
under study intra agent influences that concern beliefs
or intentions are not considered, but only emotional
strength levels (as “fear” in (Bosse et al., 2011)), con-
tagion strength always concerns emotional level SV
and thus γ
ij
is given by the following equation:
γ
ij
= expressiveness
j
∗ a
ij
∗ openness
j
(1)
In the above, expressiveness
j
and openness
j
, are
agent specific values, and a
ij
the channel strength.
The latter is determined by a linear function that de-
pends on the euclidean distance between the agents
dis(Pos
i
,Pos
j
), in the area of influence. In equation
2 dis
infl
is the radius of the area of influence, i.e. the
area which contains agents, emotional levels of which
affect agent i.
a
ij
= 1 −
dis(Pos
i
,Pos
j
)
dis
infl
(2)
The overall contagion strength is determined by:
γ
i
=
∑
i∈AF
γ
ij
(3)
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
196
Looking for
Plan
Group Members
Searching
Evacuating
Exploring
No Emergency
Exiting
perceive−danger()
exiting−room()
move−closer−to−member()
read−plan() find−exit()
plan−failed()
get−dissoriented()
loosing−group−member()
child−exited()
member−found()
see−officer()
read−plan()
move−closer−to−member()
find−exit()
get−dissoriented()
exiting−room()
reached−next()
move−to−next()
wander()
move−closer−to−member()
wander()
Figure 2: The XM state transition diagram. “No emergency” and “Exiting” are the initial and final state respectively.
where AF is the set of agents currently located in the
area of influence of agent i. Since the present work
adopts a simpler model for determining emotional
contagion than that of ASCRIBE, we simply compute
the influence of agents by the following equation:
δSV
social
(P,Mem,E) =
∑
j∈AF
(γ
ij
/γ
i
) ∗ (SV
i
− SV
j
)
|AF|
where SV
i
is the emotional strength of the agent i, ob-
tained by eStrength(E) and SV
j
are the emotion levels
of other agents in the area of influence, obtained by
the percept of the agent.
Given the emotion revision function described
above, the horror-level and the speed of the agent are
updated by simple mapping functions.
5 EVACUATION SIMULATION
Agent simulation is a valuable tool for informally ver-
ifying system properties, that can reveal a variety of
desired, or unwanted and unexpected emerging be-
haviours. One of the main benefits of formally speci-
fying emotional agents using
e
X , is that a simulation
can be easily derived.
A large number of agent simulation platforms and
tools have been proposed in the literature. NetLogo
(Wilensky, 1999) has been widely accepted as a plat-
form for agent based simulation of emerging and so-
cial phenomena. It offers an easy to use environment
for the complete development and testing of the sim-
ulation experiment with strong visualization facilities
and a programming language that has a strong func-
tional flavour. These reasons led to its introduction
as the tool of choice for implementing the simulation
model described in Section 4.
However, direct encoding of an
e
X model is not
supported by the NetLogo language, in the sense
that the user should manually encode in the Netlogo
language functions (reporters) representing
e
X func-
tions, emotions and the state transition diagram, a task
that proves to be error prone and result in non-easily
modifiable code. Thus, in order to accommodate the
former, a modified version of a state machine do-
main specific language (DSL), originally introduced
in (Sakellariou, 2012), was developed that supports
e
X . The new DSL allows a direct encoding of the
e
X
model in a notation that facilitates its rapid develop-
ment. Each agent is mapped to a NetLogo turtle, with
a number of turtle variables holding percepts, mem-
ory, and the emotion vector. These demand the devel-
opment of appropriate NetLogo code, since they are
experiment depended. Probably, the most interesting
part of the DSL is the encoding of the
e
X-Machine
state transition diagram and the corresponding func-
tions, with the DSL allowing their encoding in a form
very close to the specification presented. For instance,
part of the transition diagram depicted in Figure 2, is
encoded as follows in the simulation:
to-report state-def-of-persons
report (list
state "No Emergency"
# x-func "perceive-danger"
goto "Looking for Plan"
# otherwise do "nothing" goto "No Emergency"
end-state ...
state "Evacuating"
# x-func "loosing-group-member"
goto "Searching Group Members"
# x-func "get-dissoriented" goto "Exploring"
# x-func "plan-failed" goto "Exploring"
# x-func "find-exit" goto "Exiting"
# x-func "reach-next" goto "Evacuating"
# x-func "move-to-next" goto "Evacuating"
# x-func "exiting-room" goto "Evacuating"
# otherwise do "nothing" goto "Evacuating"
end-state ...
end
e
X functions that annotate transitions, are directly
EvacuationSimulationthroughFormalEmotionalAgentbasedModelling
197

encoded as reporters, although the semantics of the
results they return are handled by a meta-interpreter,
discussed below. This encoding is different that that
reported in (Stamatopoulou et al., 2012) that uses Pro-
log as the language for encoding functions, and has
increased efficiency. For instance the function:
ϕ
perceive-danger
: (P, (ε,Pos, S,Ch), E) 7→
(“DangerPerceived”,(ε,Pos,S,Ch))
if danger ∈ P, is now directly encoded in NetLogo as:
to-report perceive-danger [Perc Mem Emo]
ifelse has-percept "danger" Perc
[report (list true "Danger Perceived" Mem)]
[report [false] ]
end
A meta-interpreter, fully developed in the NetL-
ogo language that respects the
e
X semantics is re-
sponsible for executing the agents, obtaining input
from the simulation environment and updating the
agent “simulation state” in the latter. At each com-
putation step, the meta-interpreter determines the set
of applicable functions to the current
e
X state, and se-
lects a single function to “fire” leading to state and
memory change. In the original
e
X , function se-
lection among multiple applicable functions is non-
deterministic, however, such an approach creates a
number of problems in the simulation. Thus, in the
DSL transition definitions as presented above, an or-
dering on the function selection is implied, with the
functions appearing higher in the state definition hav-
ing priority over those appearing lower.
Having the layer for specification and execution
of
e
X agents, we developed a simulation experiment
(available in
http://users.uom.gr/˜iliass
) that
allows a number of parameters to be set, such as the
total number of people on the office floor, the num-
ber of parents as well as the monitoring of various
parameters, such as the average time units required
for evacuation and the total evacuation time. The lat-
ter is defined as the number of cycles required for all
evacuees to exit the office floor. In the simulation the
following assumptions hold:
• Space is discrete, with each individual occupying
a 40×40 cm cell, as in (Kirchner et al., 2003).
Discretisation of space is well suited both to the
e
X formalism, since the latter deals with discrete
events (input/output), as well as to NetLogo, since
the patch size can be adjusted according to this as-
sumption. The office floor measures 49m × 35m.
• Agent speed ranges between 1 and 4, thus agents
can move with a maximum speed of approxi-
mately 1.6m/sec.
• Agents’ vision is obstructed by walls, leading to a
limited perception of the environment.
• Children are modelled as simple reactive agents,
that follow their parents if they have visual contact
with them, otherwise stay still.
6 EXPERIMENTS
A set of experiments was conducted with a varying
number of agents and security officers, using two
different emotion functions, the first (no EC) with-
out considering social aspects of emotion contagion,
whereas the second taking into account emotion con-
tagion (EC) with an influence distance of 10. All re-
sults listed in table 1 are average times of 20 runs with
varying initial conditions.
Although results are preliminary and need fur-
ther extensive experimentation and model validation,
some initial observations can be made. A first obser-
vation is that the number of security officers present
in the area decreases the evacuation time. This is ex-
pected since, (a) emotion levels decrease when agents
“see” a security officer, thus the overall population
remains calm during evacuation and (b) when an
agent becomes “disoriented” then the presence of se-
curity officers providing evacuation instructions leads
to these agents resuming evacuation sooner. A sec-
ond observation is that emotion contagion seems not
to play a significant role when the number of evacuees
is less than 1000. In fact, evacuation time appears to
be slightly less, since calm crowds help keep emo-
tional levels within bounds. However, when the pop-
ulation increases, emotion contagion increases evacu-
ation time, since increase of emotion levels “spread”
within the crowd, an effect that has been observed in
some real life situations as well.
In Table 1, columns indicated with “(P)” show
evacuation times under the existence of 50 parents. In
these experiments, simulation was terminated when
the number of evacuees in the simulation area was un-
der 10% of parent population. This terminating con-
dition was adopted specifically for these tests, since
according to the model, when parents loose visual
contact with their children, they engage in a random
exploration that can even, in some cases, lead to a non
completed evacuation within reasonable time limits
and increase dramatically evacuation times. Even
with such a terminating condition, in some cases ex-
periments failed to terminate within a bound of 13000
time units (indicated with a dash in Table 1). In all
cases, the evacuation times under the presence of par-
ents are significantly increased, since the latter have to
interrupt their exit to look for their children in many
cases, and thus remain on the evacuation floor for
longer periods of time. In this set of experiments,
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
198
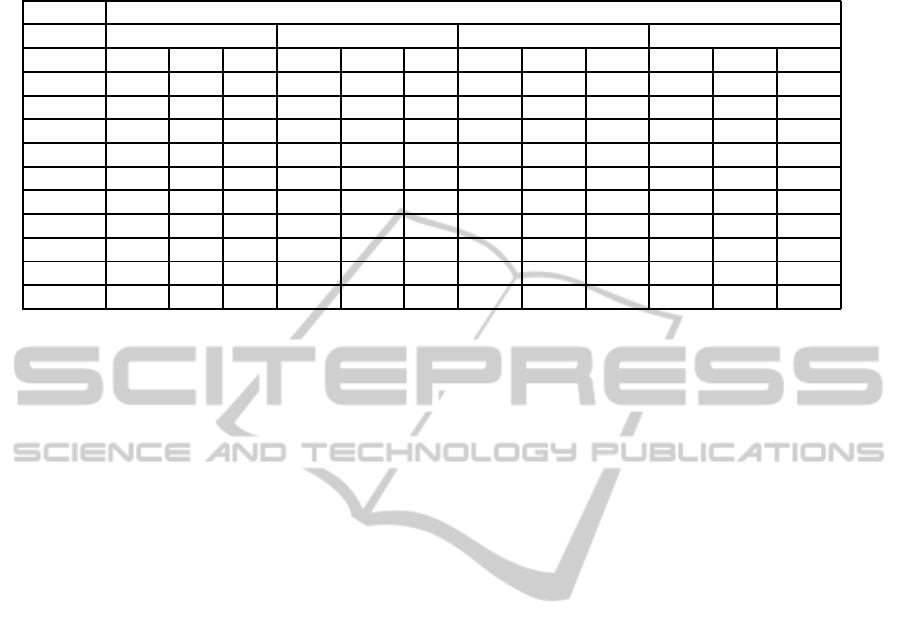
Table 1: Evacuation time in alternative scenarios; EC signifies that emotion contagion is included in the emotion revision
function, and no EC otherwise. (P) indicates simulations involving 50 parents.
Security Officers
No EC EC (P) No-EC (P) EC
Agents 0 5 10 0 5 10 0 5 10 0 5 10
200 101 105 108 94 100 102 2532 435 185 4918 781 209
400 126 130 134 126 128 131 4036 1110 271 8260 882 304
600 252 209 192 181 194 204 5910 2015 394 6621 2703 567
800 666 353 337 627 338 325 6698 2641 819 - 3801 575
1000 968 491 423 1702 584 431 7999 3193 1230 - 5471 1316
1200 1132 690 524 2859 970 489 - - - - - -
1400 1286 739 541 3742 1052 581 - - - - - -
1600 1443 796 618 4426 1345 664 - - - - - -
1800 1519 868 686 4581 1384 625 - - - - - -
2000 1634 924 715 4816 1594 745 - - - - - -
emotion contagion has a increasing effect in all cases,
since parents have higher levels of emotion and these
values are propagated to other agents as well.
By no means the results reported above constitute
a validation of the evacuation model. The aim of the
paper was to demonstrate that a believable model of
evacuation can be obtained by formal modelling of
agents with complex emotion influenced behaviour
and that the latter can lead to a simulation.
7 CONCLUSIONS
In this work, formal ABM has been applied to
an emergency evacuation scenario. Emotions X-
Machines, a special class of state based machines,
have been used to model individuals acting under
the influence of emotions, the later being revised by
both agent perception and a simplified version of the
ASCRIBE emotion contagion model.
e
X-Machines,
seem to provide the modelling constructs to easily ac-
commodate such complex emotion theories and the
corresponding agent behaviour. A simulation based
on the described model was developed in NetLogo
and preliminary results were obtained demonstrating
how emotion contagion affects evacuation time.
However, the artificial emotions model is by no
means complete. The model needs further enhance-
ment to deal with emotions that affect perception ap-
praisal, communication, etc. Thus, the present work
can be extended towards a number of directions. One
of them is to investigate the effect of introducing the
full OCC model of emotions, as in (Steunebrink et al.,
2011) and study its effects to the behaviour of agent
in a number of situations. Another direction involves
validating the model. Although, evacuation model
validation still lacks a set of benchmarks and data sets
publicly available, as well as a methodology for such
a validation process, a recent proposal described in
(Ronchi et al., 2013) introduces a set of validation
tests that models can be evaluated against.
Finally, although the formal model was easily
mapped to NetLogo, given the DSL developed for the
task, a main direction towards the simulation of larger
scale experiments, is to develop a compiler from
e
X
specifications to NetLogo. Such a compiler will fa-
cilitate large model development, reducing the time
required to move from formal modelling to visualisa-
tion. Our plans, include a similar compiler to other
agent simulation tools, including simulators build in
functional programming languages, such as Erlang or
Haskell, taking advantage of the efficiency and scala-
bility of the latter.
REFERENCES
Bonabeau, E. (2002). Agent-based modeling: Methods and
techniques for simulating human systems. Proceed-
ings of the National Academy of Sciences of the United
States of America, 99(Suppl 3):7280–7287.
Bosse, T., Hoogendoorn, M., Klein, M. C., Treur, J., and
Van Der Wal, C. N. (2011). Agent-based analysis
of patterns in crowd behaviour involving contagion of
mental states. In Modern Approaches in Applied In-
telligence, pages 566–577. Springer.
Camillen, F., Capri, S., Garofalo, C., Ignaccolo, M., In-
turri, G., Pluchino, A., Rapisarda, A., and Tudisco, S.
(2009). Multi agent simulation of pedestrian behavior
in closed spatial environments. In Science and Tech-
nology for Humanity (TIC-STH), 2009 IEEE Toronto
International Conference, pages 375–380.
Christensen, K. and Sasaki, Y. (2008). Agent-based emer-
gency evacuation simulation with individuals with
disabilities in the population. Journal of Artificial So-
cieties and Social Simulation, 11(3):9.
Dalgleish, T. and Power, M. (1999). Handbook of Cognition
and Emotion. Eds. Chichester: John Wiley and Sons.
EvacuationSimulationthroughFormalEmotionalAgentbasedModelling
199

Frijda, N. H. (2007). What might emotions be? com-
ments on the comments. Social Science Information,
46(3):433–443.
Holcombe, M. and Ipate, F. (1998). Correct Systems: Build-
ing a Business Process Solution. Springer, London.
Hoogendoorn, M., Treur, J., Van Der Wal, C. N., and
Van Wissen, A. (2010). Modelling the interplay of
emotions, beliefs and intentions within collective de-
cision making based on insights from social neuro-
science. In Neural Information Processing. Theory
and Algorithms, pages 196–206. Springer.
Ipate, F. and Holcombe, M. (1997). An integration testing
method that is proved to find all faults. International
Journal of Computer Mathematics, 63(3):159–178.
Kefalas, P., Stamatopoulou, I., and Basakos, D. (2012). For-
mal modelling of agents acting under artificial emo-
tions. In BCI 2012, 5th Balkan Conf. in Informatics.
Kefalas, P., Stamatopoulou, I., Sakellariou, I., and Eleft-
herakis, G. (2009). Transforming Communicating
X-machines into P Systems. Natural Computing,
8(4):817–832.
Kirchner, A., Kl¨upfel, H., Nishinari, K., Schadschneider,
A., and Schreckenberg, M. (2003). Simulation of
competitive egress behavior: comparison with aircraft
evacuation data. Physica A: Statistical Mechanics and
its Applications, 324(3-4):689–697.
Kleinginna, P. and Kleinginna, A. (1981). A categorized list
of emotion definitions, with suggestions for a consen-
sual definition. Motivation and Emotion, 5:345–379.
Kuligowski, E. D. (2004). Review of 28 egress models. In
Peacock, R. D. and Kuligowski, E. D., editors, Work-
shop on Building Occupant Movement During Fire
Emergencies. Session 3.3. Gaithersburg, MD, pages
68–90. NIST Special Publication 1032 (2005).
Marreiros, G., Santos, R., Ramos, C., and Neves, J. (2010).
Context-aware emotion-based model for group deci-
sion making. Intelligent Systems, IEEE, 25(2):31–39.
Miyoshi, T., Nakayasu, H., Ueno, Y., and Patterson, P.
(2012). An emergency aircraft evacuation simulation
considering passenger emotions. Computers & Indus-
trial Engineering, 62(3):746 – 754. Soft Computing
for Management Systems.
Ortony, A., Clore, G., and Collins, A. (1988). The cognitive
structure of emotions. Cambridge University Press,
Cambridge, MA.
Parrott, W. (2001). Emotions in Social Psychology. Psy-
chology Press, Philadelphia.
Ronchi, E., Kuligowski, E. D., Reneke, P. A., Peacock,
R. D., and Nilsson, D. (2013). The process of verifi-
cation and validation of building fire evacuation mod-
els. Technical Report 1822, National Institute of Stan-
dards and Technology, US Department of Commerce.
Sakellariou, I. (2012). Turtles as state machines -
agent programming in netlogo using state machines.
In ICAART 2012, 4th International Conference on
Agents and Artificial Intelligence, pages 375–378.
SciTePress.
Santos, G. and Aguirre, B. E. (2004). A critical review
of emergency evacuation simulation models. In Pea-
cock, R. D. and Kuligowski, E. D., editors, Workshop
on Building Occupant Movement During Fire Emer-
gencies. Session 3.3. Gaithersburg, MD, pages 27–52.
NIST Special Publication 1032 (2005).
Schadschneider, A., Klingsch, W., Kl¨upfel, H., Kretz, T.,
Rogsch, C., and Seyfried, A. (2009). Evacuation dy-
namics: Empirical results, modeling and applications.
In Meyers, R. A., editor, Encyclopedia of Complexity
and Systems Science, pages 3142–3176. Springer.
Stamatopoulou, I., Sakellariou, I., and Kefalas, P. (2012).
Formal agent-based modelling and simulation of
crowd behaviour in emergency evacuation plans. In
ICTAI 2012, 24th International Conference on Tools
with Artificial Intelligence, pages 1133–1138. IEEE.
Steunebrink, B. R., Dastani, M., and Meyer, J.-J. C. (2010).
Emotions to control agent deliberation. In AAMAS
2010, 9th International Conference on Autonomous
Agents and Multiagent Systems, pages 973–980.
Steunebrink, B. R., Dastani, M., and Meyer, J.-J. C. (2011).
A formal model of emotion triggers: an approach for
BDI agents. Synthese, 185(S1):83–129.
Tsai, J., Fridman, N., Bowring, E., Brown, M., Epstein,
S., Kaminka, G., Marsella, S. C., Ogden, A., Rika,
I., Sheel, A., Taylor, M., Wang, X., Zilka, A., and
Tambe, M. (2011). ESCAPES - evacuation simulation
with children, authorities, parents, emotions, and so-
cial comparison. In Innovative Applications Track of
AAMAS 2011, 10th International Conference on Au-
tonomous Agents and Multiagent Systems.
Wilensky, U. (1999). NetLogo. Center for Con-
nected Learning and Computer-Based Mod-
eling, Northwestern Univ., Evanston, IL.
http://ccl.northwestern.edu/netlogo/.
Zarboutis, N. and Marmaras, N. (2004). Searching efficient
plans for emergency rescue through simulation: the
case of a metro fire. Cognition, Technology and Work,
6:117–126.
Zheng, X., Zhong, T., and Liu, M. (2009). Model-
ing crowd evacuation of a building based on seven
methodological approaches. Building and Environ-
ment, 44(3):437–445.
Zhou, S., Chen, D., Cai, W., Luo, L., Low, M. Y. H., Tian,
F., Tay, V. S.-H., Ong, D. W. S., and Hamilton, B. D.
(2010). Crowd modeling and simulation technolo-
gies. ACM Trans. Model. Comput. Simul., 20(4):20:1–
20:35.
Zoumpoulaki, A., Avradinis, N., and Vosinakis, S. (2010).
A multi-agent simulation framework for emergency
evacuations incorporating personality and emotions.
In Artificial Intelligence: Theories, Models and Ap-
plications, volume 6040 of Lecture Notes in Computer
Science, pages 423–428. Springer Berlin Heidelberg.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
200
