
Use of Multiple Low Level Features to Find Interesting Regions
Michael Borck
1,2
, Geoff West
1,2
and Tele Tan
3,2
1
Department of Spatial Sciences, Curtin University, Perth, Australia
2
CRC for Spatial Information, Canberra, Australia
3
Department of Mechanical Engineering, Curtin University, Perth, Australia
Keywords:
Mobile Mapping, Feature Selection, Feature Extraction, Machine Learning, 3D Images.
Abstract:
Vehicle-based mobile mapping systems capture co-registered imagery and 3D point cloud information over
hundreds of kilometres of transport corridor. Methods for extracting information from these large datasets are
labour intensive and automatic methods are desired. In addition, such methods need to be easily configured
by non-expert users to detect and measure many classes of objects. This paper describes a workflow to take a
large number of image and depth features, use machine learning to generate an object detection system that is
fast to configure and run. The output is high detection of the objects of interest but with an acceptable number
of false alarms. This is desirable as the output is fed into a more complex and hence more computationally
expensive analysis system to reject the false alarms and measure the remaining objects. Image and depth
features from bounding boxes around objects of interest and random background are used for training with
some popular learning algorithms. The interface allows a non-expert user to observe the performance and
make modifications to improve the performance.
1 INTRODUCTION
Computer vision research is moving to the stage
where quite complex systems can be used in real
world applications, although in most cases the meth-
ods are turnkey. There are applications in which
a non-expert user needs to configure a complex se-
quence of processes for their application. Such an
application is the processing of co-registered imagery
and 3D point cloud information acquired from a mov-
ing vehicle along transport corridors. GPS and inertial
guidance allows the data to be registered to the world
coordinate system enabling reasonably accurate loca-
tion information to be acquired including the location
of street side furniture, width of roads, power line to
vegetation distances etc. Such systems can acquire
enormous amounts of data quite quickly. For exam-
ple the business district of Perth, Western Australia
consists of 320kms of roads resulting in 122GBytes
of image and depth data. Currently such data is pro-
cessed manually meaning it can take months to anal-
yse. The need is for methods to detect and measure
objects of interest to the user from the co-registered
imagery and depth data. Although 100% detection
with zero errors is desirable, however even if the per-
formance is such that less human intervention is spent
processing the data then that is a good outcome e.g.
100% detection and 20% false alarm rate.
This paper describes one stage of a multi-stage
system to speed up the processing of mobile map-
ping data. A large number of image and depth fea-
tures are extracted for objects of interest and the back-
ground. A number of classifiers are available that se-
lect the best combination of the features to give the
best performance. The parameters of the system can
be manipulated by the user to find all the objects of
interest. The trade-off is a significant number of false
alarms. However the overall result is that the number
of regions that have to be further analysed is reduced
meaning more complex and hence more computation-
ally intensive methods can be used to increase perfor-
mance. Results show that depth features improve the
performance over just image features.
Although the main objective is good detection per-
formance, the ease of use of such a system is also im-
portant, especially when integrated into the workflow
of the user. Use is made of Orange, a GUI based open
source interactive machine learning system (Dem
ˇ
sar
et al., 2004). Modules have been written to carry out
image and depth processing and to interface to differ-
ent data providing systems.
The main data capturing system used was Earth-
654
Borck M., West G. and Tan T..
Use of Multiple Low Level Features to Find Interesting Regions.
DOI: 10.5220/0004827506540661
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 654-661
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

mine, see Figure 1. The system captures panoramic
imagery and uses stereo algorithms to generate co-
registered 3D point clouds. Pairs of panoramic stereo
images are captured typically at 10 metre spacing
down a transport corridor. Each panorama is made
up of images from four cameras pointing to the front,
back, left and right of the vehicle. A 3D point cloud
surrounds the position of the cameras uses a stereo
template matching approach (Guinn, 2002).
Figure 1: Earthmine system showing two sets of panorama
cameras.
Earthmine has developed a server-based system
that allows the querying via location to obtain data
about a particular location. The data can be processed
using a number of methods e.g. randomly, from a
number of known locations, or by “driving” along the
capture pathway.
The paper has two main contributions. First, there
are questions on whether only image features or only
depth features or some combination of image and
depth should be used. Secondly the need to assess the
performance of feature selection and feature extrac-
tion on a variety of classifiers. Results are presented
that show the classification performance of the sys-
tem on different objects and recommend appropriate
features and classifiers.
2 BACKGROUND
It is very easy for a non-expert user to select re-
gions from images using bounding boxes that iso-
late an object from the rest of the image. In most
cases bounding boxes add in background informa-
tion that can confuse recognition. Many features
have been proposed that have a certain amount of
“robustness” to the presence of background informa-
tion as well as attempting to allow a certain amount
of variation in the appearance of the object of inter-
est. Features such as Haar wavelets and Histogram
of Gradients (HoG) (Dalal and Triggs, 2005) have
proven popular. Descriptors can be dense or use in-
teresting points in the image. Some common in-
terest points descriptors include Scale-Invariant Fea-
ture Transform (SIFT) (Lowe, 2004), Speed Up Ro-
bust Features (SURF) (Bay et al., 2008) and Features
from Accelerated Segment Test (FAST) (Rosten et al.,
2010).
Similar to Alexe et al. (2010) it is assumed that an
object possess a uniqueness that allows it to be seg-
mented from the background and that this uniqueness
can be learned. This research differs with this and
other approaches as it includes the use of depth fea-
tures. The question is which combination of these de-
scriptors is best for each type of object that is required
to be detected? In essence the more features to select
from, the more likely the right combination will be
found. Some feature are tuned to different circum-
stances e.g. it is widely regarded that HoG is very
good for locating pedestrians but poor for other ob-
jects (Dalal and Triggs, 2005). Colour provides pow-
erful information for object detection but the RGB
channels are sensitive to lighting variations. In this
paper intensity, hue and saturation features will be
used. Statistical descriptors are quick to generate and
provide a compact representation.
Texture is another salient feature in images (He
and Wang, 1991). Textures have been described by
a precise statistical distribution of the image tex-
ture coming from the Gabor filter response (Wu
et al., 2001), local binary patterns (Zhao and
Pietikainen, 2006), and the Edge Histogram Descrip-
tor (EHD) (Wu et al., 2001). Mikolajczyk and Schmid
(2005) show that that moments and steerable filters,
like Gabor filters, show the best performance among
the low dimensional descriptors.
Interest points are often used to identify a point
in an image that may be useful in image match-
ing (Mikolajczyk and Schmid, 2001) and view-based
object recognition (Lowe, 2004). This research fo-
cuses on trying to recognise generic classes. The pro-
portion of interest points in a region is used as a de-
scriptor under the premise that interesting regions will
have a higher proportion of interest points.
Interesting regions will have more edges. It is not
always possible to obtain ideal edges so encoding the
proportion of edge pixels in a region is another mea-
sure to differentiate objects from non-objects (Phung
and Bouzerdoum, 2007). Alexe et al. (2010) examine
the edge density near the bounding box borders. In
this research both of these features are implemented.
A range image contains distance measurements
from a selected reference point or plane to surface
points of objects within a scene (Besl, 1988) allow-
ing more information of the scene to be recovered.
Simply extending available descriptors designed for
an intensity image to a depth image will not make use
of additional information encoded in the depth map.
Depth cues can improve object detection (Zhao et al.,
UseofMultipleLowLevelFeaturestoFindInterestingRegions
655
2012). It provides information about objects in terms
of geometry and shape (Badami et al., 2013). Fea-
ture extraction on range images has proven to be more
complex than on intensity images due to the irregular
distribution of range image data and the nature of the
features present in the range images (Coleman et al.,
2007).
Surface normals and curvature estimates are ex-
tremely fast and easy to compute, they approximate
the geometry of a point’s k-neighborhood with only
a few values. Similar to the orientation of edges, the
orientation of surface normals provide additional in-
formation about the object. Histogram of Oriented
Surface Normal (HoSN) (Tang et al., 2012) are de-
signed to capture local geometric characteristics for
object recognition with depth information. Local pla-
narity compares the planes of neighbourhood regions
by considering the relationship to the surrounding sur-
face normals (Cadena and Ko
ˇ
secka, 2013)
Zhao et al. (2012) propose a local depth pattern as
a descriptor. They divide the region into cells, cal-
culate the average depth of each cell and then cal-
culate the difference between every cell pair. This
difference vector forms the descriptor. Cadena and
Ko
ˇ
secka (2013) also use a depth difference feature
that is calculated on superpixels rather than cells.
3 WORKFLOW
In many applications of computer vision, workflow
is an important consideration. A user would typi-
cally read in some acquired data, process it inter-
actively and produce the desired result. Much em-
phasis is on manual control of the process. Simple
procedures can be fully automated if they are robust
enough. However for many recognition applications,
much tuning is needed by a skilled user. The chal-
lenge is to produce a workflow that a non-expert user
can use to configure a complex process such as ob-
ject detection. To do this, a user must be able to
view selected parts of the data, identify objects of in-
terest and train a system to use the best features for
recognition through a feature selection process com-
bined with some form of pattern recognition method
such as a decision tree. Such a system was build us-
ing Orange, an open source toolkit for machine learn-
ing onto which image processing, visualisation and
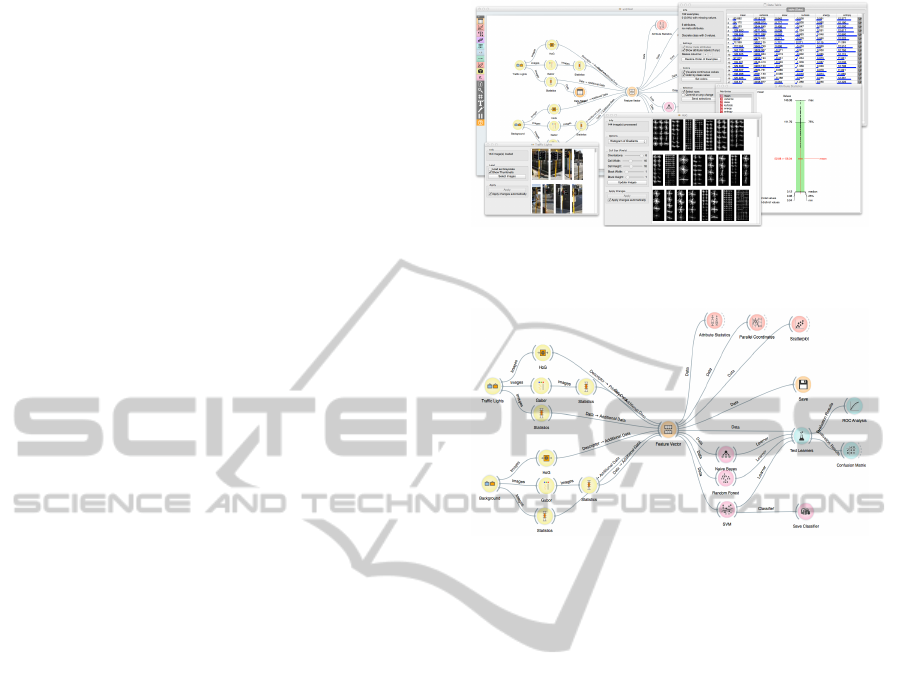
data acquisition methods were added. Figures 2 and
3 show an example of the workflow.
Figure 2: Example of image processing methods in Orange:
Histogram of Gradients and statistical measures.
Figure 3: Full workflow in Orange from data through to
classification performance.
4 DATA
Our data consists of a pairs of co-registered RGB and
depth images. Within the Earthmine data set, 200 lo-
cations were visited. At each location each of the
front, back, left and right tile views were obtained and
bounding boxes defined to select objects of interest
with the images. This resulted in a data set of 885 ex-
amples: 39 Bench seats; 53 Bus shelters; 69 Cars; 22
People; 81 Rubbish bins; 109 Street signs; 148 Traffic
Lights; and 364 Background regions. Cars and people
are considered dead space and would be removed.
Some of the background regions were selected to
have similar aspect ratios to the objects as follows:
42 with aspect ratios similar to bus shelters; 93 with
aspect ratios similar to rubbish bins; 117 with aspect
rations similar to traffic lights; and 112 regions of ran-
dom aspect ratios.
Figure 4 shows examples of intensity and depth
data from the Earthmine system. For each of the four
images: front, back, left and right, a depth image can
be generated that is co-registered with the intensity
image. In each of these images, darker pixels are fur-
ther from the cameras. The intensity images are typi-
cal of street scenes and captured at shutter speeds that
reduce blur as the vehicle could be travelling at 60-80
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
656

kmph. The depth images can be seen to correspond to
the intensity images especially with large scale parts
of the environment. Small scale objects are picked out
such as lamp posts. As with many stereo algorithms,
features such as edges are relied upon to give the best
estimation of depth from disparity and smooth areas
require interpolation between reliable depth estimates
to build a full depth map. The Earthmine data does
produce confidence maps corresponding to the depth
data although they are not currently used in this work.
(a) (b)
Figure 4: Example pairs of co-registered intensity and depth
images (a) Image and depth map of an intersection. (b) Im-
age and depth map of building.
Figures 5(a) to 5(h) show examples of co-
registered intensity and depth images of the classes
of objects used for object recognition.
In some images there is noise and a lack of good
correspondence. Figure 5(a) shows a training image
for traffic lights that have generally tall narrow bound-
ing boxes. Figure 5(h) shows some of the training im-
ages for bus shelters that have generally a more broad
aspect ratio. For all of these datasets, there is variation
in appearance of each object.
Randomly acquired background regions enables
the quick training of the system to discriminate be-
tween the objects of interest and the background.
(a) (b) (c) (d)
(e) (f)
(g) (h)
Figure 5: Example training image and corresponding depth
map for eight classes. (a) Traffic light. (b) Street Sign. (c)
Background. (d) Person. (e) Rubbish Bin. (f) Car. (g)
Bench. (h) Bus Shelter.
5 FEATURES
For each bounding box a feature vector was con-
structed. For imagery intensity, hue and saturation
channels were used. For each channel the follow-
ing features are extracted: edge orientation histogram,
mean, variance, skew, kurtosis, energy, entropy, edge
density, Harris density, FAST density, local binary
pattern encoded as a normalised histogram, and Ga-
bor texture distribution encoded as mean and variance
for angles 0, 45, 90 and 135 degrees.
The features above were also computed on the
depth image when treated as a grey scale image. In
addition depth specific features mean curvature, local
planarity, an in-front-of feature, Histogram of Depth
Difference (HoDD) and Histogram of Surface Nor-
mals (HoSN) were calculated. These are explained
below.
Mean curvature was encoded as the mean and
variance of the curvature across the region. Equation
4 from Kurita and Boulanger (1992) was used to cal-
culate the curvature of a region.
Local planarity is computed using the dot product
between the normal to the local plane against the k-
neighbourhood normals:
1 −
1
k N k
∑
n
i
· n
j
j∈N
(1)
The in-front-of feature was encoded as the mean
and standard deviation of the Local Depth Difference
(LDD), where LDD is calculated between the depth
at a pixel, d
i
, and the k-neighbourhood’s depths, N:
LDD =
(
k d
i
− d
j∈N
k : d
i
<
1
kNk
∑
(d
j
)
j∈N
0 : otherwise
(2)
To produce the HoDD, the region is divided into
cells of fixed size. The difference of the average depth
values of every cell pair is then calculated. This dif-
ference is recorded as a ten bin histogram. The his-
togram is then normalised to allow comparison of dif-
ferent size image regions.
For HoSN, each pixel in the region had a plane fit-
ted to the k-neighbouring pixels. The angle of surface
normal of the fitted plane with respect to the vertical
plane was recorded in a histogram with bin size of
20
◦
. The normalised histogram was used as the fea-
ture vector.
6 EXPERIMENTAL PROCESS
The objective is to find all objects of interest but with
manageable false alarm rate. To learn which fea-
UseofMultipleLowLevelFeaturestoFindInterestingRegions
657

tures and which classifier performs the best a clas-
sifier pipeline is built. The pipeline is used to ex-
plore the performance using a training set consisting
of matching and non-matching image patches.
Classifiers considered include K-NN, N
¨
aive
Bayes, Support Vector Machine (SVM), Decision
Trees, Random Forests, Boosting, Bagging and
Stacking. The last four are algorithms which use
multiple models to improve prediction performance.
Boosting and Bagging will be used to improve the
weakest classifier identified during the preprocessing
phase. For the stacking classifier all the classifiers ex-
cept SVM were combined. The implementation and
all details about these algorithms are available from
the Orange data mining system.
Performance of machine learning methods may
improve using a selected subset of best features. Fea-
ture selection is the process of selecting a subset of
relevant features for use in model construction (Mo-
toda and Liu, 2002). For this research a filter based
on SVM weights was used and a feature subset se-
lection wrapper based approach was written. The
bespoke wrapper uses forward search, an induction
algorithm, and search optimised for Area Under the
Curve (AUC).
An alternative is to use Principal Components
Analysis (PCA) to reduce the dimensionality of the
feature vector. Principal Components (PCs) are se-
lected by applying stopping rules (Jackson, 1993)
thereby reducing the dimensionality of the data. A
stopping rule is a decision criteria used to determine
how many PCs to use. Four stopping rules used in this
research include Kaiser-Guttman (Kaiser, 1960) and
Scree Plot (Jackson, 1993), Broken-Stick and vari-
ance covered.
A discretisation algorithm is used to handle prob-
lems with real-valued attributes with Decision Trees
and Bayesian Networks, treating the resulting inter-
vals as nominal values. Learners use the MDL-
Entropy discretisation method provided in the Orange
toolkit. For PCA and discretisation only the training
data is used to determine the transform. The learned
data transformation is applied to the test and valida-
tion data.
Half of the training data is used to tune classi-
fiers prior to conducting any experiments. The auto-
matic parameter search feature was used as provided
by the Orange machine learning software. If no au-
tomatic feature was provided the default parameters
were used. During this process a weak classifier from
this initial process is identified to be used. On comple-
tion of tuning the parameters of each classifier remain
fixed for all of the experiments.
It is reasonable to expect different combinations
between feature representation and classifiers could
yield different performance. Classifier Accuracy
(CA) and AUC are two popular measures used to
compare classifiers (Huang et al., 2003). Ling et al.
(2003) and Yan et al. (2003) show the AUC is suffi-
cient when comparing classifiers.
However, selecting models based on best AUC
or CA can be misleading, especially if values are
close. Repeating experiments can often end up with a
slightly different values than previous runs. Method-
ologies are employed to reduce this effect, such as
cross validation, but cannot eliminate the effect. Sta-
tistical tests are conducted to determine if differences
in AUCs are statistically significant. For classifiers
trained on the same data set the McNemar’s test is
used. McNemar’s test cannot be used on classifiers
trained on different data sets, so in this instance the
nonparametric Wilcoxon signed rank test is used.
7 RESULTS
A number of scenarios were explored for various
classifiers, classes and data sets. Data sets consid-
ered were image features, depth and a combination
of image and depth features. Prior to training, prin-
cipal components analysis and feature subset selec-
tion was applied to the data sets. A multiclass clas-
sification model was attempted to distinguish each on
the classes in the one model. Classifiers built were
based on K-NN, N
¨
aive Bayes, SVM, Decision Tree
and Random Forest algorithm proved by the Orange
toolkit. For each dataset a 10-fold cross-validation
(using 70% of the data, 63:7) on each classifier was
undertaken. Each classifier is tested for CA and AUC
scores. Classifiers were ranked based on AUC and an
approximate best model selected. Preliminary anal-
ysis rejected many classifiers. Tables 1 - 3 show the
results for some of the better classifiers using different
feature sets.
For the experiments, the best AUC for image
features only was 0.967, 0.919 for depth features
only, and 0.978 for combined image and depth fea-
tures. The best classifier is the Support Vector Ma-
chine. Similar performance was observed from Ran-
dom Forest classifiers (shown in bold in Tables 1-3).
Within each feature set four classifiers with the high-
est AUCs were selected for McNemar testing. Table 4
clearly shows that SVM was the best classifier for the
Filter(20),image +depth data set (see Table 3)
The best classifiers from each data set were ranked
and a Wilcoxon signed rank test was performed pair-
wise on each set. For image features compared to
image and depth the mean p-value was 0.317 with
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
658

Table 1: Area Under Curve (AUC) and Classification Accuracy (CA) for image features. The number in brackets indicates
how many features the classifier used.
I+D (120) Filter (20) PCA (25) FSS-SVM (30)
Classifier AUC CA AUC CA AUC CA AUC CA
Bayes 0.839 0.687 0.885 0.695 0.851 0.622 0.857 0.672
Tree 0.807 0.588 0.827 0.614 0.802 0.591 0.846 0.627
kNN 0.937 0.719 0.932 0.699 0.888 0.627 0.925 0.720
SVM 0.967 0.858 0.965 0.839 0.953 0.785 0.965 0.847
Forest 0.956 0.755 0.946 0.709 0.925 0.604 0.947 0.696
Stacked 0.949 0.776 0.935 0.724 0.914 0.661 0.940 0.727
Boosted 0.782 0.588 0.799 0.614 0.779 0.591 0.815 0.627
Bagged 0.910 0.722 0.907 0.698 0.890 0.677 0.910 0.733
Table 2: Area Under Curve (AUC) and Classification Accuracy (CA) for depth features. The number in brackets indicates
how many features the classifier used.
I+D (66) Filter (20) PCA (13) FSS-Bayes (27)
Classifier AUC CA AUC CA AUC CA AUC CA
Bayes 0.818 0.538 0.800 0.474 0.825 0.474 0.815 0.490
Tree 0.767 0.531 0.741 0.490 0.777 0.474 0.735 0.489
kNN 0.899 0.599 0.826 0.520 0.824 0.485 0.847 0.539
SVM 0.918 0.661 0.919 0.644 0.898 0.590 0.911 0.628
Forest 0.910 0.598 0.852 0.528 0.841 0.443 0.881 0.543
Stacked 0.896 0.596 0.837 0.505 0.813 0.474 0.857 0.510
Boosted 0.739 0.531 0.708 0.490 0.693 0.474 0.712 0.489
Bagged 0.869 0.611 0.812 0.559 0.799 0.516 0.826 0.585
Table 3: Area Under Curve (AUC) and Classification Accuracy (CA) for image and depth features. The number in brackets
indicates how many features the classifier used.
I+D (186) Filter (20) PCA (25) FSS-kNN (34)
Classifier AUC CA AUC CA AUC CA AUC CA
Bayes 0.823 0.678 0.886 0.687 0.876 0.656 0.877 0.695
Tree 0.815 0.615 0.841 0.617 0.796 0.546 0.839 0.646
kNN 0.962 0.767 0.936 0.711 0.898 0.643 0.953 0.769
SVM 0.978 0.859 0.975 0.843 0.971 0.813 0.978 0.855
Forest 0.969 0.773 0.952 0.706 0.936 0.606 0.960 0.743
Stacked 0.965 0.800 0.953 0.727 0.920 0.664 0.962 0.777
Boosted 0.811 0.615 0.812 0.617 0.767 0.546 0.812 0.646
Bagged 0.946 0.733 0.918 0.732 0.891 0.658 0.925 0.730
Table 4: McNemar table of top four classifiers from the im-
age and depth data set filtered for top twenty ranked features
see column Filter(20) in Table 3.
McNemar > 3.84,5% Best
SVM vs Forest 57.366 Significant SVM
SVM vs kNN 50.469 Significant SVM
SVM vs Bagged 37.593 Significant SVM
Forest vs kNN 0.043 Same neither
Forest vs Bagged 2.250 Same neither
kNN vs Bagged 1.190 Same neither
a standard deviation of 0.048. This indicates that
there was no significant difference in discriminatory
performance between image and the combination of
depth and image. As there was no significant differ-
ence in AUCs, Filter(20), SVM, image + depth with
the fewest number of features and better CA, was se-
lected as the overall best classifier.
Using the best features, a Background vs Every-
thing classifier was built to assess performance on
detecting any class from the background. Figure 6
shows ROC curves for different classifiers and is con-
sistent with previous results showing SVM, Random
Forest and N
¨
aive Bayes being good classifiers.
8 CONCLUSIONS
This paper has detailed an investigation into the first
stage of a system for recognising objects present in
UseofMultipleLowLevelFeaturestoFindInterestingRegions
659

Figure 6: Background ROC curve for K-NN (Yellow), SVM
(Purple), Decision Tree (Green), Random Forest (Aqua)
and N
¨
aive Bayes (Red).
co-registered image and depth data acquired from a
vehicle based mobile mapping system. The depth
data was acquired from the analysis of stereo pairs of
panoramic images with errors present that are com-
mon in stereo analysis. The methods used reflect the
need to find a technique that a non-expert user can use
to train the system to do a relatively inexact recogni-
tion process to find all the objects of interest with a
consequential significant but manageable false alarm
rate. Bounding boxes are used to identify objects of
interest as well as random background examples for
training. A large number of features have been in-
vestigated with the thesis that machine learning will
select the most useful ones. Features have been ex-
plored from traditional RGB images as well as from
depth images using, in some cases, the same algo-
rithms by regarding the depth images as monochrome
grey scale images. The classification results show that
image features perform better than depth features but
a combination of image and depth features performs
the best. The conclusion is that even quite coarse
depth features can improve performance.
Future work will explore larger feature sets for
each class, with more example classes. However it
has to be noted that, for training, the smallest number
of training examples is desired to improve the training
workflow for the user.
ACKNOWLEDGEMENTS
This work is supported by the Cooperative Research
Centre for Spatial Information, whose activities are
funded by the Australian Commonwealths Coopera-
tive Research Centres Programme. It provides PhD
scholarship for Michael Borck and partially funds
Professor Geoff West’s position. The authors would
like to thank John Ristevski and Anthony Fassero
from Earthmine and Landgate, WA for making avail-
able the datasets used in this work.
REFERENCES
Alexe, B., Deselaers, T., and Ferrari, V. (2010). What is
an object? Computer Vision and Pattern Recognition,
IEEE Computer Society Conference on.
Badami, I., St
¨
uckler, J., and Behnke, S. (2013). Depth-
enhanced hough forests for object-class detection and
continuous pose estimation. Semantic Perception,
Mapping and Exploration, SPME-2013.
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. V. (2008).
Speeded-up robust features (surf). Computer Vision
and Image Understanding, 110(3):346 – 359.
Besl, P. J. (1988). Active, optical range imaging sensors.
Machine vision and applications, 1(2):127–152.
Cadena, C. and Ko
ˇ
secka, J. (2013). Semantic parsing for
priming object detection in rgb-d scenes. In Semantic
Perception, Mapping and Exploration (SPME) 2013.
Coleman, S., Scotney, B., and Suganthan, S. (2007). Fea-
ture extraction on range images - a new approach. In
Robotics and Automation, 2007 IEEE International
Conference on, pages 1098 –1103.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Schmid, C., Soatto,
S., and Tomasi, C., editors, International Conference
on Computer Vision & Pattern Recognition, volume 2,
pages 886–893.
Dem
ˇ
sar, J., Zupan, B., Leban, G., and Curk, T. (2004). Or-
ange: From experimental machine learning to interac-
tive data mining. In Boulicaut, J.-F., Esposito, F., Gi-
annotti, F., and Pedreschi, D., editors, Knowledge Dis-
covery in Databases: PKDD 2004, pages 537–539.
Springer.
Guinn, J. (2002). Enhanced formation flying validation
report (jpl algorithm). NASA Goddard Space Flight
Center Rept, pages 02–0548.
He, D.-C. and Wang, L. (1991). Texture features based on
texture spectrum. Pattern Recognition, 24(5):391 –
399.
Huang, J., Lu, J., and Ling, C. (2003). Comparing naive
bayes, decision trees, and svm with auc and accuracy.
In Data Mining, 2003. ICDM 2003. Third IEEE Inter-
national Conference on, pages 553–556.
Jackson, D. A. (1993). Stopping rules in principal compo-
nents analysis: a comparison of heuristical and statis-
tical approaches. Ecology, pages 2204–2214.
Kaiser, H. F. (1960). The application of electronic comput-
ers to factor analysis. Educational and psychological
measurement.
Kurita, T. and Boulanger, P. (1992). Computation of sur-
face curvature from range images using geometrically
intrinsic weights. MVA, pages 389–392.
Ling, C. X., Huang, J., and Zhang, H. (2003). Auc: a bet-
ter measure than accuracy in comparing learning al-
gorithms. In Advances in Artificial Intelligence, pages
329–341. Springer.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
660

Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Mikolajczyk, K. and Schmid, C. (2001). Indexing based
on scale invariant interest points. In Proceedings of
Eighth IEEE International Conference on Computer
Vision, 2001., volume 1, pages 525 –531.
Mikolajczyk, K. and Schmid, C. (2005). A perfor-
mance evaluation of local descriptors. IEEE Trans-
actions on Pattern Analysis & Machine Intelligence,
27(10):1615–1630.
Motoda, H. and Liu, H. (2002). Feature selection, extrac-
tion and construction. Communication of IICM (In-
stitute of Information and Computing Machinery, Tai-
wan) Vol, 5:67–72.
Phung, S. and Bouzerdoum, A. (2007). Detecting people
in images: An edge density approach. In Acoustics,
Speech and Signal Processing, 2007. ICASSP 2007.
IEEE International Conference on, volume 1, pages
I–1229 –I–1232.
Rosten, E., Porter, R., and Drummond, T. (2010). Faster and
better: A machine learning approach to corner detec-
tion. Pattern Analysis and Machine Intelligence, IEEE
Transactions on, 32(1):105 –119.
Tang, S., Wang, X., Lv, X., Han, T. X., Keller, J., He,
Z., Skubic, M., and Lao, S. (2012). Histogram of
oriented normal vectors for object recognition with a
depth sensor. In Proceedings of 11th Asian Confer-
ence on Computer Vision (ACCV 2012).
Wu, P., Ro, Y., Won, C., and Choi, Y. (2001). Texture
descriptors in mpeg-7. In Skarbek, W., editor, Com-
puter Analysis of Images and Patterns, volume 2124
of Lecture Notes in Computer Science, pages 21–28.
Springer Berlin Heidelberg.
Yan, L., Mozer, M. C., and Wolniewicz, R. (2003). Opti-
mizing classifier performance via an approximation to
the wilcoxon-mann-whitney statistic. Proceedings of
the 20th International Conference on Machine Learn-
ing.
Zhao, G. and Pietikainen, M. (2006). Local binary pat-
tern descriptors for dynamic texture recognition. In
Pattern Recognition, 2006. ICPR 2006. 18th Inter-
national Conference on, volume 2, pages 211–214.
IEEE.
Zhao, Y., Liu, Z., Yang, L., and Cheng, H. (2012). Comb-
ing rgb and depth map features for human activity
recognition. In Signal Information Processing As-
sociation Annual Summit Conference (APSIPA ASC),
2012 Asia-Pacific, pages 1–4.
UseofMultipleLowLevelFeaturestoFindInterestingRegions
661
